Изобретение относится к космической технике и может быть использовано при наведении аппаратуры космического аппарата (КА) на исследуемый объект.
Космические съемки играют важную роль в различных научных и прикладных областях. Для наведения на объекты съемки жестко закрепленной на КА аппаратуры строят необходимую ориентацию КА и путем разворотов наводят КА на исследуемый объект [Беляев М.Ю. «Научные эксперименты на космических кораблях и орбитальных станциях» // Машиностроение. 1984. 264 с.]. Современные КА могут наводиться на заданные районы наблюдения с точностью десятков угловых секунд [А.И. Бакланов «Анализ состояния и тенденции развития систем наблюдения высокого и сверхвысокого разрешения // Вестник Самарского государственного аэрокосмического университета, №2, 2010 г.].
Положение КА на орбите определяется с помощью спутниковых навигационных систем с точностью 10-15 метров [Б.Б. Серапинас. Глобальные системы позиционирования: Учеб. Изд., - М.: ИКФ «Каталог», 2002 г., 106 с.]. Это позволяет определить положение КА с высокой точностью, навестись на нужный объект и осуществить его съемку.
Некоторые КА, такие как пилотируемые орбитальные станции (ПОС), не имеют возможности наводиться на исследуемые объекты. Для ПОС типа Международной космической станции (МКС) характерны чрезвычайно большие размеры и масса, а также наличие большого количества сложных бортовых систем. В процессе полета станции вследствие изменения ее конфигурации и массы за счет стыковок с новыми модулями, доставки и перемещения дополнительных грузов и расходования ресурсов, постоянно меняются массово-инерционные характеристики станции. При этом гиродины, отвечающие за ориентацию станции, имеют, как правило, малоезначение располагаемого кинетического момента, что ограничивает возможности по развороту станции каждый раз, когда необходимо отснять какой-либо объект, как это делалось раньше на отечественных орбитальных комплексах «Салют» и «Мир», где использовалась жестко зафиксированная, стационарная аппаратура. Трудности, связанные с ориентацией пилотируемых орбитальных станций, приводят к тому, что для съемки исследуемых объектов приходится использовать аппаратуру с ручным наведением. В частности, в космическом эксперименте «Ураган» используются переносные камеры, при этом наведение на исследуемый объект осуществляет сам космонавт.
Использование перемещаемой аппаратуры позволяет преодолеть проблему наведения на исследуемые объекты - вместо разворота станции, космонавт разворачивает камеру или другую ручную аппаратуру и снимает интересующий его объект. Применяемый в этом случае способ наведения перемещаемой аппаратуры космического аппарата на исследуемый объект, взятый авторами за прототип, включает измерение положения центра масс и ориентации КА, наблюдение оператором посредством перемещаемой аппаратуры КА исследуемого объекта и совмещение в расчетный момент времени оси перемещаемой аппаратуры с направлением на исследуемый объект [М.Ю. Беляев, Д.Ю. Караваев, Э.Э. Сармин, Л.В. Десинов, О.А. Юрина «Аппаратура и программно-математическое обеспечение для изучения земной поверхности с борта российского сегмента Международной космической станции по программе «Ураган»» // Журнал «Космонавтика и ракетостроение», №1, 2015 г., с. 63-70]. При этом надежность съемки объекта зависит от умения космонавта своевременно визуально обнаружить исследуемый объект и навести на него перемещаемую аппаратуру. В ряде случаев, особенно когда требуется осуществить съемку сравнительно небольшого объекта с высоким разрешением (длиннофокусные объективы для такой съемки имеют малое поле зрения), космонавт может промахнуться и не осуществить запланированную съемку.
При этом следует отметить, что экипаж затрачивает дополнительноевремя на подготовку к проведению сеанса съемки, что в условиях дефицита времени экипажа не всегда приемлемо, а иногда и вовсе не возможно.
Задачей, на решение которой направлено настоящее изобретение, является повышение надежности и точности ручного наведения перемещаемой аппаратуры на исследуемые объекты, а также минимизация затрат времени экипажа на подготовительные и завершающие операции при проведении сеанса съемки.
Технический результат предлагаемого изобретения заключается в повышении надежности и точности ручного наведении перемещаемой аппаратуры на исследуемые объекты, при одновременном обеспечении сокращения затрат времени экипажа на проведение сеанса съемки исследуемого объекта.
Технический результат достигается тем, что в способе наведения перемещаемой аппаратуры космического аппарата на исследуемый объект, включающем измерение положения центра масс и ориентации космического аппарата, наблюдение перемещаемой аппаратурой космического аппарата исследуемого объекта и совмещение в расчетный момент времени оси перемещаемой аппаратуры с направлением на исследуемый объект, дополнительно задают положения перемещаемой аппаратуры относительно иллюминатора при наблюдении исследуемого объекта, по измеренному положению центра масс и ориентации космического аппарата определяют и фиксируют границы наблюдаемой области расположения исследуемого объекта из всех заданных положений перемещаемой аппаратуры относительно иллюминатора, определяют по цифровой модели наблюдаемой области видимое изображение из заданных положений в фиксированных границах наблюдаемой области расположения исследуемого объекта, устанавливают длительность наблюдения исследуемого объекта из каждого заданного положения и наводят в ручном режиме перемещаемую аппаратуру на исследуемый объект из положения, отвечающего максимальной длительности наблюдения.
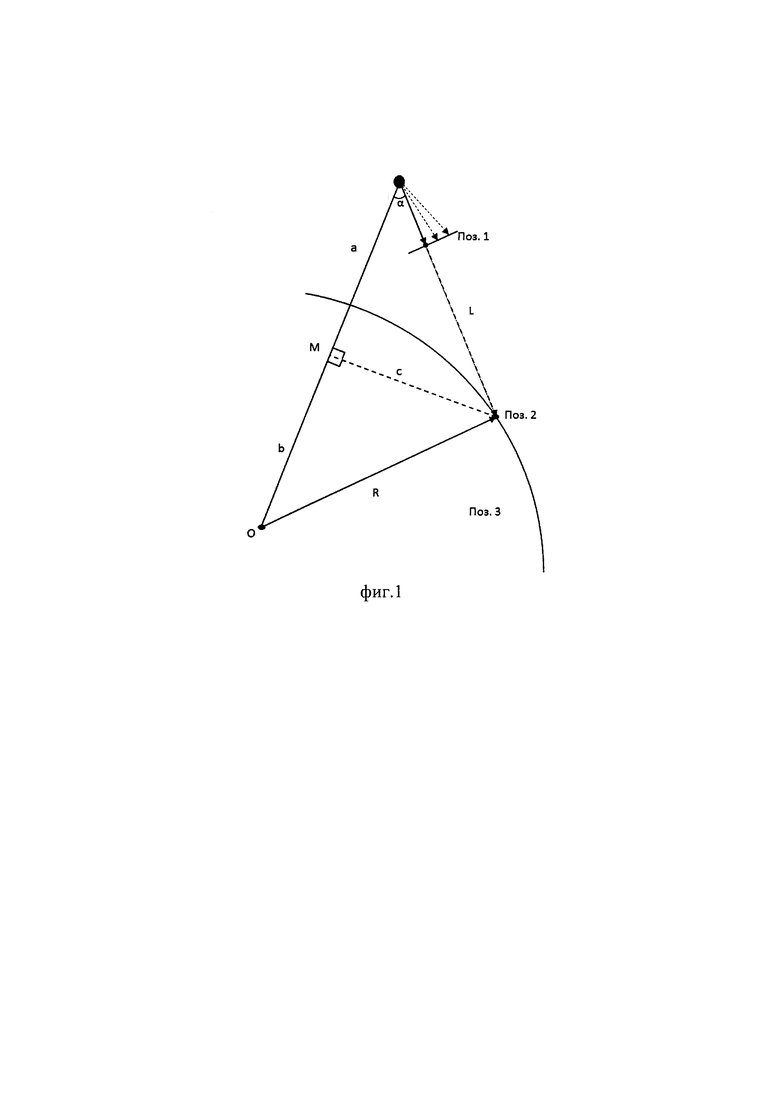
Сущность заявляемого изобретения поясняется фиг. 1, на которой представлена схема наведения аппаратуры на исследуемые объекты с помощью моделирования изображений наблюдаемых областей.
Для реализации наведения предварительно моделируют условия проведения наблюдений каждого исследуемого объекта. По результатам моделирования создаются готовые изображения исследуемой области с использованием ее цифровой модели, соответствующие реальной картине, которую увидит космонавт через иллюминатор в момент пролета исследуемых объектов в расчетный момент времени для проведения съемки. Изображения для космонавта создаются с различным масштабом. На каждом изображении показывается поле зрение через иллюминатор в зависимости от возможных доступных углов наведения используемой аппаратуры, трасса КА и выделяются контуры исследуемого объекта (либо группы объектов). Данные изображения вместе другими инструкциями предоставляются экипажу. Таким образом, космонавт ознакомившись с заданием и смоделированными изображениями, осуществляет съемку, не тратя время на моделирование условий проведения сеанса съемки на борту. При этом благодаря реалистичности заранее смоделированных изображений, обеспечивается своевременность обнаружения исследуемого объекта космонавтом, надежность наведения аппаратуры и съемки исследуемого объекта.
Моделирование изображений реализуется методом «обратной трассировки лучей».
При этом условный наблюдатель или фокус объектива считается расположенным по оси вращения иллюминатора (фиг. 1, поз. 1) и на единичном расстоянии от плоскости стекла. В системе координат (СК), ось X которой проходит по оси вращения, а оси Y и Z - лежат в плоскости иллюминатора, определяется все множество векторов, проходящих через точку фокуса и каждый пиксель будущего изображения (круг на экране компьютера или планшета). Каждый вектор можно также представить как прямоугольный треугольник с одним единичным катетом и вторым катетом, определяемым условным расстоянием в пикселях от центральной точки иллюминатора.
Рассчитывается матрица направляющих косинусов перехода от СК, связанной с иллюминатором в инерциальную СК, одна ось которой проходит через полюса Земли, а две другие расположены в плоскости экватора.
Все множество векторов умножается на эту матрицу и для каждого вектора определяется его точка пересечения (фиг. 1, поз. 2) с поверхностью области исследуемого объекта (фиг. 1, поз. 3). Поверхность представляется эллипсоидом вращения. В результате получается множество «лучей», выходящих из точки фокуса (из глаза наблюдателя) и пересекающих поверхность в точках с известными координатами.
Для дальнейшего построения изображения используется электронная растровая карта поверхности в любой заданной проекции (Меркатора, цилиндрической и т.п.), а также таблица характеристик примерно 5000 видимых звезд (склонение, прямое восхождение и яркость).
Координаты точки пересечения проходящего через этот пиксель «луча» определяются с помощью простых геометрических соотношений (фиг. 1) следующего вида:

Соответствующий пиксель круга на экране компьютера или планшета получает цвет, извлеченный из соответствующей точки растровой карты или цвет соответствующей яркости звезды, совпавшей по координатам с данной точкой.
При необходимости наблюдения объектов на небесной сфере, для применения предложенного способа может использоваться цифровая карта звездного неба.
Предлагаемый способ позволяет повысить надежность и точностьручного наведения аппаратуры на исследуемые объекты, при одновременном обеспечении сокращения затрат времени экипажа на проведение сеанса съемки исследуемого объекта.
В настоящее время технически все готово для реализации предложенного способа, например, на МКС. На МКС имеется набор аппаратуры с ручным наведением: различные модели цифровых фотоаппаратов Nikon с длиннофокусными объективами, а также «Видеоспектральная система» («ВСС»), обновленная версия которой была доставлена на борт в 2023 году. Фотокамеры регистрируют исследуемые объекты в оптическом диапазоне спектра электромагнитных волн, в натуральных цветах через иллюминатор станции с пространственным разрешением до 2 м. «ВСС» обеспечивает регистрацию спектральной плотности энергетической яркости излучения, отраженного от снимаемой области, в диапазоне, от 400 до 950 нанометров с пространственным разрешением до 50 м. Помимо этого на МКС в распоряжении космонавтов имеются различные вычислительные средства: персональные и планшетные компьютеры. Эти компьютеры оснащены всем необходимым прикладным программным обеспечением.
Измерение положения центра масс КА на орбите выполняется с помощью радиоконтроля орбиты и по данным спутниковых навигационных систем. Ориентация КА измеряется с помощью датчиков углового положения: магнитометров, солнечных и звездных датчиков и им подобных. Цифровые модели наблюдаемых областей в настоящее время разработаны, доступны и могут быть загружены в память компьютера. Для расчета времени наблюдения используются уравнения движения КА по орбите, данные о его ориентации и цифровая модель наблюдаемой области. Необходимые расчеты могут быть выполнены с помощью имеющихся вычислительных средств. Наведение перемещаемой аппаратуры на исследуемые объекты может быть выполнено космонавтом. В перспективе наведение может выполняться и автоматически с использованием технологий «искусственного интеллекта».
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ПЕРЕМЕЩАЕМОЙ НА БОРТУ ПИЛОТИРУЕМОГО КОРАБЛЯ АППАРАТУРОЙ НАБЛЮДЕНИЯ | 2021 |
|
RU2780900C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ФОТОГРАФИРУЕМЫХ С КОСМИЧЕСКОГО АППАРАТА ЗЕМНЫХ ОБЪЕКТОВ | 2014 |
|
RU2587539C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РАЗМЕЩЕННОЙ НА КОСМИЧЕСКОМ КОРАБЛЕ ПЕРЕНОСНОЙ АППАРАТУРОЙ НАБЛЮДЕНИЯ | 2019 |
|
RU2717603C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ С КОСМИЧЕСКОГО АППАРАТА КООРДИНАТ ИСТОЧНИКА КОЛЬЦЕВЫХ ВОЛН НА ВОДНОЙ ПОВЕРХНОСТИ | 2016 |
|
RU2640944C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЕОГРАФИЧЕСКИХ КООРДИНАТ ОБЛАСТИ НАБЛЮДЕНИЯ ПЕРЕМЕЩАЕМОЙ ОТНОСИТЕЛЬНО КОСМИЧЕСКОГО АППАРАТА АППАРАТУРЫ НАБЛЮДЕНИЯ, СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ И УСТРОЙСТВО РАЗМЕЩЕНИЯ ИЗЛУЧАТЕЛЕЙ НА АППАРАТУРЕ НАБЛЮДЕНИЯ | 2012 |
|
RU2524045C2 |
| СПОСОБ УПРАВЛЕНИЯ РАЗМЕЩЕННОЙ НА КОСМИЧЕСКОМ КОРАБЛЕ ПЕРЕНОСНОЙ АППАРАТУРОЙ НАБЛЮДЕНИЯ | 2019 |
|
RU2725104C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЕОГРАФИЧЕСКИХ КООРДИНАТ ИЗОБРАЖЕНИЙ ОБЪЕКТОВ НА ПОВЕРХНОСТИ ПЛАНЕТЫ ПРИ СЪЕМКЕ С ПИЛОТИРУЕМОГО КОСМИЧЕСКОГО АППАРАТА | 2007 |
|
RU2353902C2 |
| СПОСОБ УПРАВЛЕНИЯ РАЗМЕЩЕННОЙ НА КОСМИЧЕСКОМ КОРАБЛЕ ПЕРЕНОСНОЙ АППАРАТУРОЙ НАБЛЮДЕНИЯ | 2019 |
|
RU2717614C1 |
| СИСТЕМА УПРАВЛЕНИЯ РАЗМЕЩЕННОЙ НА КОСМИЧЕСКОМ КОРАБЛЕ ПЕРЕНОСНОЙ АППАРАТУРОЙ НАБЛЮДЕНИЯ | 2019 |
|
RU2725009C1 |
| ТРЕНАЖЕР ПИЛОТИРУЕМОГО КОСМИЧЕСКОГО КОРАБЛЯ | 2008 |
|
RU2367027C1 |
Изобретение относится к космической технике и может быть использовано при наведении аппаратуры космического аппарата (КА) на исследуемый объект (ИО). Для наведения перемещаемой аппаратуры КА на ИО задают положения перемещаемой аппаратуры наблюдения относительно иллюминатора при наблюдении ИО. По измеренному положению центра масс и ориентации КА определяют и фиксируют границы наблюдаемой области расположения ИО из всех заданных положений перемещаемой аппаратуры относительно иллюминатора. Определяют по цифровой модели наблюдаемой области видимое изображение из заданных положений в фиксированных границах наблюдаемой области расположения ИО. Устанавливают длительность наблюдения ИО из каждого заданного положения. Наводят в ручном режиме перемещаемую аппаратуру на ИО из положения, отвечающего максимальной длительности наблюдения, совмещая в расчетный момент времени ось перемещаемой аппаратуры с направлением на ИО. Достигается повышение надежности и точности ручного наведении перемещаемой аппаратуры на исследуемые объекты при одновременном обеспечении сокращения затрат времени экипажа на проведение сеанса съемки исследуемого объекта. 1 ил.
Способ наведения перемещаемой аппаратуры космического аппарата на исследуемый объект, включающий измерение положения центра масс и ориентации космического аппарата, наблюдение перемещаемой аппаратурой космического аппарата исследуемого объекта и совмещение в расчетный момент времени оси перемещаемой аппаратуры с направлением на исследуемый объект, отличающийся тем, что задают положения перемещаемой аппаратуры наблюдения относительно иллюминатора при наблюдении исследуемого объекта, по измеренному положению центра масс и ориентации космического аппарата определяют и фиксируют границы наблюдаемой области расположения исследуемого объекта из всех заданных положений перемещаемой аппаратуры относительно иллюминатора, определяют по цифровой модели наблюдаемой области видимое изображение из заданных положений в фиксированных границах наблюдаемой области расположения исследуемого объекта, устанавливают длительность наблюдения исследуемого объекта из каждого заданного положения и наводят в ручном режиме перемещаемую аппаратуру на исследуемый объект из положения, отвечающего максимальной длительности наблюдения.
| СПОСОБ УПРАВЛЕНИЯ ПЕРЕМЕЩАЕМОЙ НА БОРТУ ПИЛОТИРУЕМОГО КОРАБЛЯ АППАРАТУРОЙ НАБЛЮДЕНИЯ | 2021 |
|
RU2780900C1 |
| СПОСОБ УПРАВЛЕНИЯ РАЗМЕЩЕННОЙ НА КОСМИЧЕСКОМ КОРАБЛЕ ПЕРЕНОСНОЙ АППАРАТУРОЙ НАБЛЮДЕНИЯ | 2019 |
|
RU2725104C1 |
| СПОСОБ ОРИЕНТАЦИИ ЦЕЛЕВОЙ АППАРАТУРЫ КОСМИЧЕСКИХ АППАРАТОВ И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ | 2009 |
|
RU2412873C1 |
| US 9185290 B1, 10.11.2015 | |||
| US 9376221 B1, 28.06.2016. | |||

