Область техники, к которой относится изобретение
[001] Настоящая технология в целом относится к лидарным системам и способам для обнаружения объектов в окружающей среде автономного транспортного средства.
Уровень техники
[002] В устройствах, использующих лидарные (LIDAR, LIght Detection And Ranging) системы, например, в автономных транспортных средствах, реализация такой системы часто зависит от требований к точности и к плотности информации. В общем случае лидарная система выполняет световое сканирование окружающей зоны и собирает лучи света, отраженные от окружающих объектов.
[003] В некоторых случаях для излучателя и сканирующей системы в лидарной системе, сканирующей окружение, может быть предусмотрена вращающаяся призма с наклонными гранями, где нормаль к каждой отражающей поверхности не перпендикулярна оси вращения. Наклонные грани призмы отражают падающие на них выходные лучи под различными пространственными углами. Пространственный угол выходного луча зависит от места падения на грани призмы.
[004] В некоторых лидарных системах относительный угол между излучателем и отражающей поверхностью может значительно изменяться в пределах поля зрения, поскольку отражающие поверхности наклонены относительно оси вращения. В результате могут возникать искажения или неоднородность распределения выходных лучей, приводя к изменениям плотности выборки. Например, на краях поля зрения соседние выходные лучи могут быть распределены в гораздо большей угловой области, чем вблизи центра.
[005] Поэтому сохраняется потребность в лидарных системах, направленных на решение по меньшей мере некоторых из этих проблем.
Раскрытие изобретения
[006] В связи с изложенным требуются системы и способы, позволяющие избегать, уменьшать или преодолевать ограничения известных технологий.
[007] Согласно одному аспекту настоящей технологии реализована лидарная система, содержащая излучатель, способный излучать по меньшей мере один луч света, детектор, способный принимать свет, отраженный от окружающих объектов, и вращающийся сканирующий элемент, способный получать по меньшей мере один луч света и сканировать по меньшей мере одним лучом света за пределами системы путем вращения вокруг оси вращения. Вращающийся сканирующий элемент содержит отражающую призму с по меньшей мере четырьмя гранями, наклоненными относительно оси вращения, и жестко соединенный с ней кольцевой элемент с внутренней поверхностью, расположенной вокруг оси вращения по существу в плоскости, параллельной оси вращения, при этом внутренняя поверхность расположена под переменным углом относительно оси вращения, а нормаль к внутренней поверхности изменяется от перпендикулярной относительно оси вращения до наклонной относительно оси вращения. Излучатель, детектор и вращающийся сканирующий элемент выполнены так, что по меньшей мере один луч света падает на внутреннюю поверхность кольцевого элемента, а затем на одну из по меньшей мере четырех граней отражающей призмы, при этом угол падения по меньшей мере одного луча на грань зависит от переменного угла кольцевого элемента, а свет, отраженный от окружающих объектов, отражается одной из по меньшей четырех граней отражающей призмы в детектор.
[008] В некоторых вариантах осуществления изобретения кольцевой элемент имеет по меньшей мере две плоскости симметрии, каждая из которых содержит ось вращения отражающей призмы.
[009] В некоторых вариантах осуществления изобретения внутренняя поверхность имеет по меньшей мере две зоны параллельной поверхности, где по меньшей мере часть внутренней поверхности по существу параллельна оси вращения, и по меньшей мере две зоны наклонной поверхности, где по меньшей мере другая часть внутренней поверхности расположена под углом к оси вращения.
[010] В некоторых вариантах осуществления изобретения внутренняя поверхность кольцевого элемента содержит чередующиеся зоны параллельной поверхности и зоны наклонной поверхности вокруг оси вращения, при этом внутренняя поверхность плавно изменяется на переходах между зоной параллельной поверхности и смежной зоной наклонной поверхности.
[011] В некоторых вариантах осуществления изобретения кольцевой элемент может селективно поворачиваться относительно отражающей призмы так, что угол падения по меньшей мере одного луча на отражающую призму может регулироваться в соответствии с угловым положением кольцевого элемента относительно отражающей призмы.
[012] В некоторых вариантах осуществления изобретения кольцевой элемент расположен по существу между излучателем и отражающей призмой вдоль направления, соответствующего оси вращения.
[013] В некоторых вариантах осуществления изобретения система способна выполнять периферийное сканирование.
[014] В некоторых вариантах осуществления изобретения система выполнена с возможностью ее крепления к самоуправляемому транспортному средству на его боковой поверхности.
[015] В некоторых вариантах осуществления изобретения отражающая призма имеет по существу пирамидальную форму.
[016] В некоторых вариантах осуществления изобретения по меньшей мере четыре грани отражающей призмы скошены относительно оси вращения.
[017] В некоторых вариантах осуществления изобретения излучатель выполнен с возможностью излучения по меньшей мере одного луча света под углом относительно оси вращения сканирующего элемента.
[018] Согласно другому аспекту настоящей технологии реализован способ коррекции искажений сканирования лидарной системы, содержащей вращающийся сканирующий элемент. Способ включает в себя изменение углового положения кольцевого элемента вращающегося сканирующего элемента относительно отражающей призмы вращающегося сканирующего элемента, при этом положение кольцевого элемента относительно отражающей призмы определяет распределение по меньшей мере одного выходного луча, излучаемого излучателем лидарной системы, а коррекция искажений сканирования связана с регулировкой распределения по меньшей мере одного выходного луча.
[019] В некоторых вариантах осуществления изобретения способ дополнительно включает в себя определение контроллером лидарной системы искажений сканирования для света, полученного во время работы лидарной системы, при этом изменение углового положения кольцевого элемента основано на этих определенных искажениях сканирования.
[020] В некоторых вариантах осуществления изобретения изменение углового положения кольцевого элемента относительно отражающей призмы включает в себя позиционирование кольцевого элемента так, чтобы минимизировать искажения сканирования для по меньшей мере части диапазона угла поворота сканирующего элемента во время работы.
[021] Согласно еще одному аспекту настоящей технологии реализована лидарная система, содержащая излучатель, способный излучать по меньшей мере один луч света, детектор, способный принимать свет, отраженный от окружающих объектов, и вращающийся сканирующий элемент, способный получать по меньшей мере один луч света и сканировать по меньшей мере одним лучом света за пределами системы путем вращения вокруг оси вращения. Вращающийся сканирующий элемент содержит отражающую призму с по меньшей мере четырьмя гранями, наклоненными относительно оси вращения, и жестко соединенный с ней светопропускающий элемент с внешней краевой частью переменной толщины, расположенной вокруг оси вращения по существу в плоскости, параллельной оси вращения, при этом излучатель, детектор и вращающийся сканирующий элемент выполнены так, что по меньшей мере один луч света падает на светопропускающий элемент и преломляется им, а затем падает на одну из по меньшей мере четырех граней отражающей призмы, при этом угол падения по меньшей мере одного луча на грань зависит от переменной толщины светопропускающего элемента, а свет, отраженный от окружающих объектов, отражается одной из по меньшей четырех граней отражающей призмы в детектор.
[022] В некоторых вариантах осуществления изобретения светопропускающий элемент имеет по меньшей мере две плоскости симметрии, каждая из которых содержит ось вращения отражающей призмы.
[023] В некоторых вариантах осуществления изобретения светопропускающий элемент содержит по меньшей мере два параллельных краевых участка, где первая поверхность светопропускающего элемента по существу параллельна второй поверхности светопропускающего элемента, при этом первая и вторая поверхности по существу параллельны оси вращения; и по меньшей мере два клиновидных участка, где по меньшей мере часть первой поверхности не параллельна второй поверхности, при этом по меньшей мере два клиновидных участка толще по меньшей мере двух параллельных участков.
[024] В некоторых вариантах осуществления изобретения край светопропускающего элемента содержит чередующиеся параллельные краевые участки и клиновидные участки вокруг оси вращения, при этом край плавно изменяется на переходах между параллельным краевым участком и смежным клиновидным участком.
[025] В некоторых вариантах осуществления изобретения светопропускающий элемент может селективно поворачиваться относительно отражающей призмы так, что угол падения по меньшей мере одного луча на отражающую призму может регулироваться в соответствии с угловым положением светопропускающего элемента относительно отражающей призмы.
[026] В некоторых вариантах осуществления изобретения светопропускающий элемент расположен по существу между излучателем и отражающей призмой вдоль направления, соответствующего оси вращения.
[027] В некоторых вариантах осуществления изобретения система способна выполнять периферийное сканирование.
[028] В некоторых вариантах осуществления изобретения система выполнена с возможностью ее крепления к самоуправляемому транспортному средству на его боковой поверхности.
[029] В некоторых вариантах осуществления изобретения отражающая призма имеет по существу пирамидальную форму.
[030] В некоторых вариантах осуществления изобретения по меньшей мере четыре грани отражающей призмы скошены относительно оси вращения.
[031] В некоторых вариантах осуществления изобретения излучатель выполнен с возможностью излучения по меньшей мере одного луча света под углом относительно оси вращения сканирующего элемента.
[032] Согласно еще одному аспекту настоящей технологии реализован способ коррекции искажений сканирования лидарной системы, содержащей сканирующий элемент. Способ включает в себя изменение углового положения светопропускающего элемента вращающегося сканирующего элемента относительно отражающей призмы вращающегося сканирующего элемента, при этом положение светопропускающего элемента относительно отражающей призмы определяет распределение по меньшей мере одного выходного луча, излучаемого излучателем лидарной системы, а коррекция искажений сканирования связана с регулировкой распределения по меньшей мере одного выходного луча.
[033] В некоторых вариантах осуществления изобретения способ дополнительно включает в себя определение контроллером лидарной системы искажений сканирования для света, полученного во время работы лидарной системы, при этом изменение углового положения светопропускающего элемента основано на этих определенных искажениях сканирования.
[034] В некоторых вариантах осуществления изобретения изменение углового положения светопропускающего элемента относительно отражающей призмы включает в себя позиционирование светопропускающего элемента так, чтобы минимизировать искажения сканирования для по меньшей мере части диапазона угла поворота вращающегося сканирующего элемента во время работы.
[035] В контексте настоящего описания термины «источник света» или «излучатель» соответствует любому устройству, способному обеспечивать излучение сигнала, например, в числе прочего, в виде луча света, содержащего излучение на одной или нескольких соответствующих длинах волн электромагнитного спектра. В одном примере источник света может представлять собой лазерный источник. При этом вышеупомянутые источники света могут содержать один или несколько лазеров, таких как твердотельный лазер, лазерный диод, лазер большой мощности, или альтернативный источник света, такой как источник света на основе светодиода. В некоторых не имеющих ограничительного характера примерах лазерный источник содержит лазерный диод Фабри-Перо, лазер на квантовой яме, лазер с распределенным брэгговским отражателем (DBR, Distributed Bragg Reflector), лазер с распределенной обратной связью (DFB, Distributed FeedBack), волоконный лазер или лазер поверхностного излучения с вертикальным резонатором (VCSEL Vertical-Cavity Surface-Emitting Laser). Кроме того, лазерные источники могут излучать световые лучи различных видов, например, световые импульсы, непрерывные колебания (CW, Continuous Wave), квазинепрерывные колебания и т.д. В некоторых не имеющих ограничительного характера примерах лазерные источники могут содержать лазерный диод, способный излучать свет с длиной волны в диапазоне приблизительно 650-1150 нм. В качестве альтернативы, лазерные источники могут содержать лазерный диод, способный излучать световые лучи с длиной волны в диапазонах приблизительно 800-1000 нм, приблизительно 850-950 нм, приблизительно 1300-1600 нм или в любом другом подходящем диапазоне. Например, в зависимости от конкретных элементов, длина волны источников света может варьироваться от 400 нм до 2000 нм.
[036] Если не указано иное, термин «приблизительно» в отношении числового значения означает отклонение до 10% от указанного значения.
[037] В контексте настоящего описания выражение «выходной луч» также может соответствовать пучку излучения, который сформирован источником излучения и отправлен в сторону интересующей области (ROI, Region Of Interest). Выходной луч может иметь один или несколько параметров, таких как длительность импульса, угловая дисперсия луча, длина волны, мгновенная мощность, плотность фотонов на различных расстояниях от источника света, средняя мощность, интенсивность луча, ширина луча, частота повторения лучей, последовательность лучей, скважность импульсов, фаза и т.д. Выходной луч может быть неполяризованным или поляризованным случайным образом, может не иметь конкретной или фиксированной поляризации (например, поляризация может изменяться с течением времени) или может иметь конкретную поляризацию (например, линейную поляризацию, эллиптическую поляризацию или круговую поляризацию).
[038] В контексте настоящего описания термин «входной луч» означает излучение или свет, попадающий в систему, обычно после отражения или рассеяния на одном или нескольких объектах в области ROI. Входной луч также может называться пучком излучения или лучом света. Под отражением подразумевается, что по меньшей мере часть выходного луча, падающего на один или несколько объектов в области ROI, отражается от одного или нескольких объектов. Входной луч может иметь один или несколько параметров, таких как время пролета (т.е. время от излучения до обнаружения), мгновенная мощность (например, сигнатура мощности), средняя мощность по всему обратному импульсу, распределение фотонов или сигнал в течение периода обратного импульса и т.д. В зависимости от конкретного варианта использования, часть излучения или света, собранного во входном луче, может поступать от источников, отличных от отраженного выходного луча. Например, по меньшей мере часть входного луча может содержать шумовое световое излучение из окружающей среды (включая рассеянный солнечный свет) или из других источников света, внешних по отношению к настоящей системе.
[039] В контексте настоящего описания термин «окрестность» или «окружающая среда» транспортного средства соответствует области или пространству вокруг транспортного средства, содержащему часть его окружающей среды в данный момент времени, доступную для сканирования с использованием одного или нескольких датчиков, установленных на транспортном средстве, например, с целью формирования 3D-карты такой окрестности или обнаружения объектов. В некоторых не имеющих ограничительного характера примерах обнаруженные объекты могут включать в себя полностью или частично человека, транспортное средство, мотоцикл, грузовой автомобиль, поезд, велосипед, инвалидную коляску, детскую коляску, пешехода, животное, дорожный знак, светофор, разделительную линию, дорожную разметку, парковочное место, пилон, ограждение, дорожный барьер, выбоину, железнодорожный переезд, препятствие на дороге или рядом с ней, бордюр, остановившееся на дороге или рядом с ней транспортное средство, столб, дом, здание, мусорный бак, почтовый ящик, дерево, любой другой подходящий объект или любое другое подходящее сочетание целых двух или более объектов либо их частей.
[040] В контексте настоящего описания область ROI может содержать часть доступной для наблюдения окружающей среды лидарной системы, где могут быть обнаружены один или несколько объектов. Следует отметить, что область ROI лидарной системы может зависеть от различных условий, таких как ориентация лидарной системы (например, направление оптической оси лидарной системы), положение лидарной системы относительно окружающей среды (например, высота относительно уровня земли и расстояние до соседних элементов рельефа и препятствий), рабочие параметры лидарной системы (например, мощность излучения, вычислительные настройки, заданные углы работы) и т.д. В частности, область ROI лидарной системы может быть задана в виде плоского угла или телесного угла. В одном примере область ROI также может задаваться конкретным диапазоном расстояний (например, до 200 м и т.п.).
[041] В контексте настоящего описания термин «контроллер» означает любое компьютерное аппаратное средство, способное выполнять программы, подходящие для решения поставленной задачи и/или для регулирования или управления функциями подключенных элементов. В контексте настоящего описания термин «электронное устройство» подразумевает, что устройство может функционировать в качестве сервера или контроллера для других электронных устройств, тем не менее, это не обязательно для настоящей технологии. Таким образом, некоторые (не имеющие ограничительного характера) примеры электронных устройств включают в себя блок автономного вождения, персональные компьютеры (настольные, ноутбуки, нетбуки и т.п.), смартфоны и планшеты, а также сетевое оборудование, такое как маршрутизаторы, коммутаторы и шлюзы. Должно быть понятно, что в настоящем контексте тот факт, что устройство функционирует в качестве электронного устройства, не означает, что оно не может функционировать в качестве сервера для других электронных устройств.
[042] Функции различных элементов, описанных или показанных на чертежах, включая любой функциональный блок, обозначенный как «процессор», могут быть реализованы с использованием специализированных аппаратных средств, а также с использованием аппаратных средств, способных выполнять соответствующее программное обеспечение. Если используется процессор, эти функции могут выполняться одним выделенным процессором, одним совместно используемым процессором или множеством отдельных процессоров, некоторые из которых могут использоваться совместно. Кроме того, явное использование термина «процессор» или «контроллер» не должно трактоваться как указание исключительно на аппаратные средства, способные выполнять программное обеспечение, и может подразумевать, помимо прочего, аппаратные средства цифрового сигнального процессора (DSP), сетевой процессор, специализированную интегральную схему (ASIC), программируемую вентильную матрицу (FPGA), постоянное запоминающее устройство (ПЗУ) для хранения программного обеспечения, оперативное запоминающее устройство (ОЗУ) и/или энергонезависимое запоминающее устройство. Также могут подразумеваться другие аппаратные средства, общего назначения и/или заказные.
[043] Программные модули или просто модули, реализация которых предполагается в виде программных средств, могут быть представлены здесь как любое сочетание элементов блок-схемы или других элементов, указывающих на выполнение шагов процесса и/или содержащих текстовое описание. Такие модули могут выполняться аппаратными средствами, показанными явно или подразумеваемыми.
[044] В контексте настоящего описания числительные «первый», «второй», «третий» и т.д. используются лишь для указания на различие между существительными, к которым они относятся, но не для описания каких-либо определенных взаимосвязей между этими существительными. Кроме того, как встречается в настоящем описании в другом контексте, ссылка на «первый» элемент и «второй» элемент не исключает того, что эти два элемента в действительности могут быть одним и тем же элементом.
[045] Каждый вариант осуществления настоящей технологии относится к по меньшей мере одной из вышеупомянутых целей и/или к одному из вышеупомянутых аспектов, но не обязательно ко всем ним. Должно быть понятно, что некоторые аспекты настоящей технологии, связанные с попыткой достижения вышеупомянутой цели, могут не соответствовать этой цели и/или могут соответствовать другим целям, явным образом здесь не упомянутым.
[046] Дополнительные и/или альтернативные признаки, аспекты и преимущества вариантов осуществления настоящей технологии содержатся в дальнейшем описании, на приложенных чертежах и в формуле изобретения.
Краткое описание чертежей
[047] Эти и другие признаки, аспекты и преимущества настоящей технологии поясняются в дальнейшем описании, в приложенной формуле изобретения и на следующих чертежах.
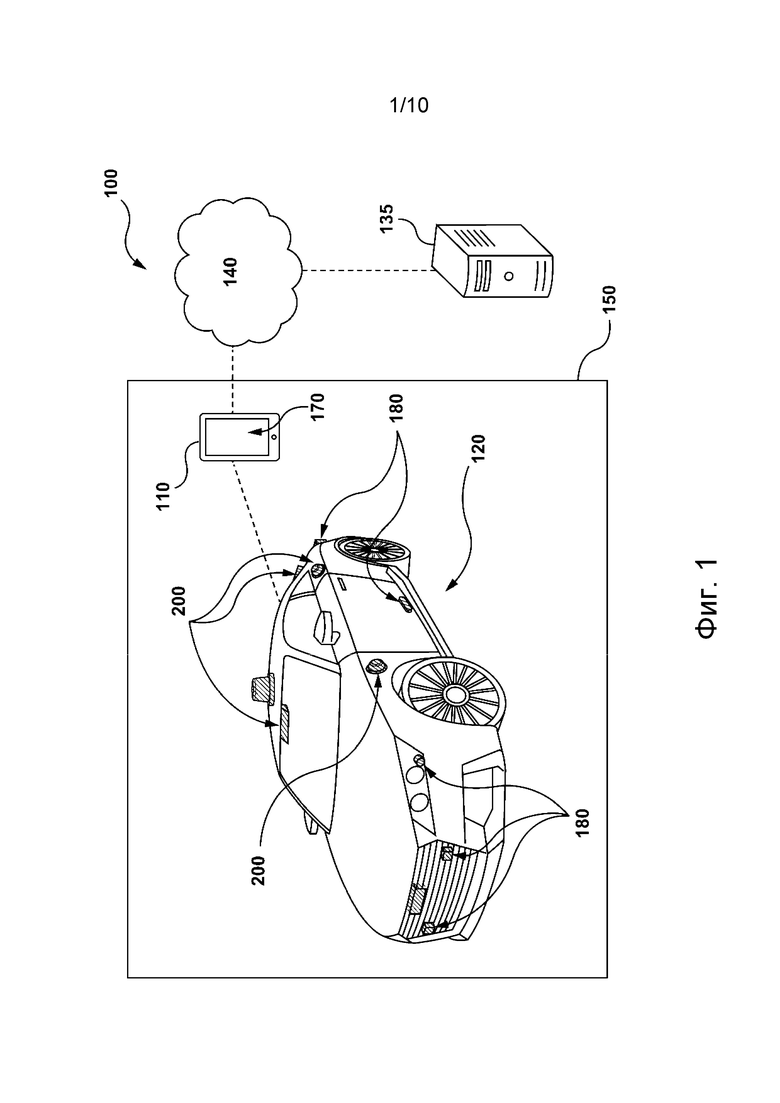
[048] На фиг. 1 представлена схема сетевой вычислительной среды, пригодной для использования с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии.
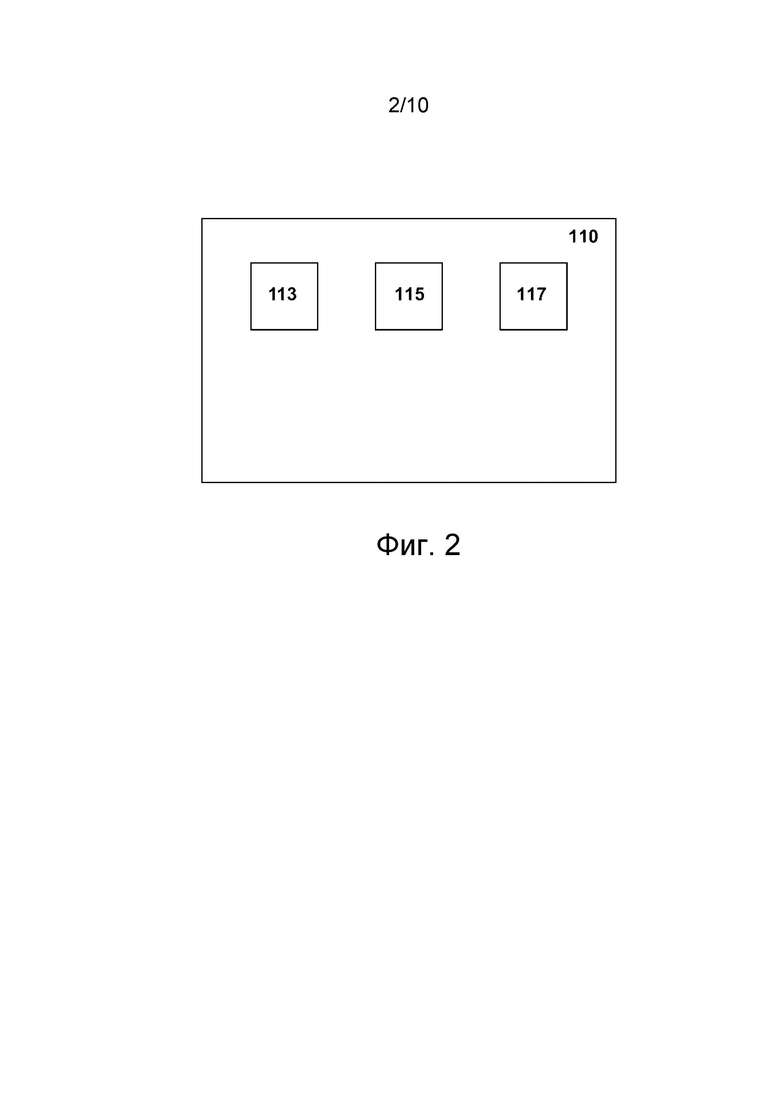
[049] На фиг. 2 представлена схема электронного устройства, которое может быть использовано для реализации некоторых не имеющих ограничительного характера вариантов осуществления настоящей технологии.
[050] На фиг. 3 представлен схематический вид сверху лидарной системы согласно не имеющим ограничительного характера вариантам осуществления настоящей технологии.
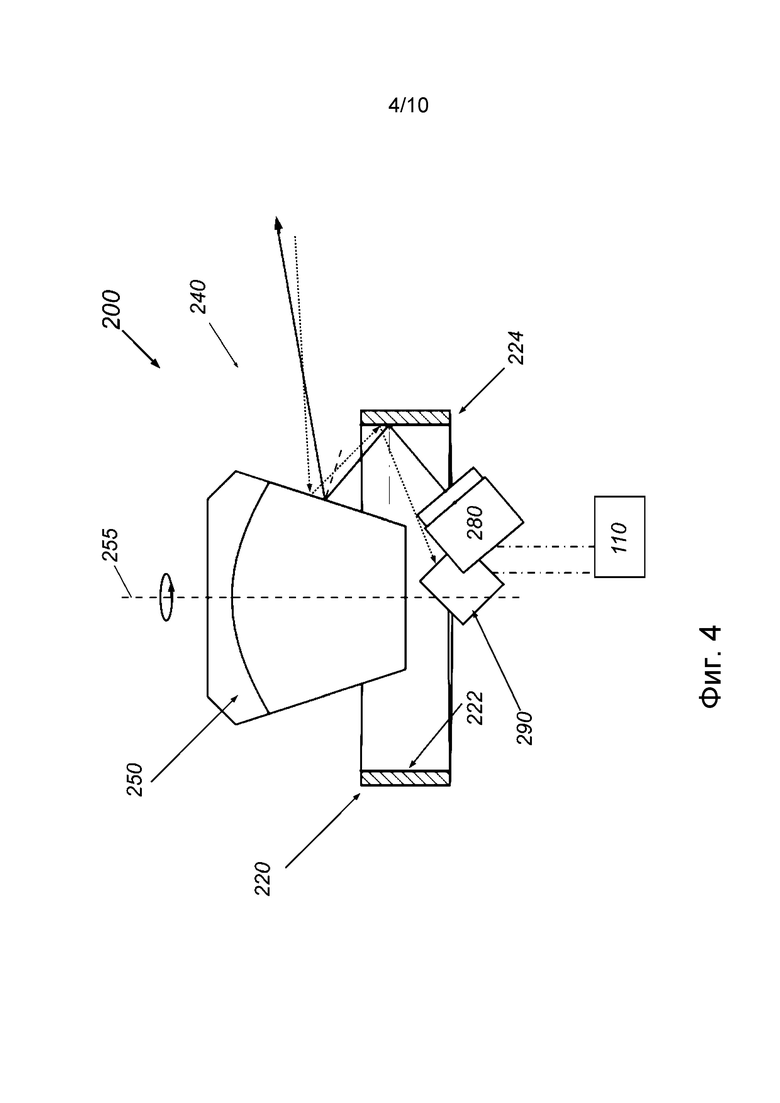
[051] На фиг. 4 представлен разрез 4-4 лидарной системы согласно фиг. 3.
[052] На фиг. 5 представлен разрез 5-5 лидарной системы согласно фиг. 3.
[053] На фиг. 6 приведена блок-схема способа регулировки лидарной системы согласно фиг. 3.
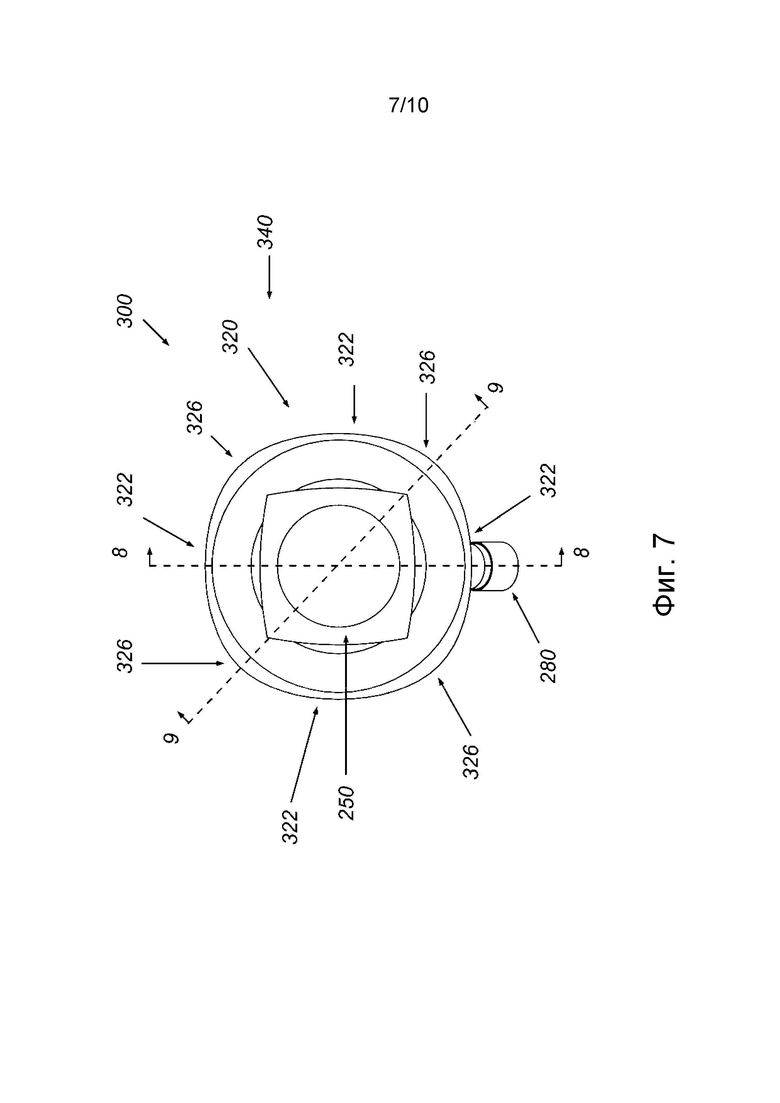
[054] На фиг. 7 представлен схематический вид сверху другой лидарной системы согласно не имеющим ограничительного характера вариантам осуществления настоящей технологии.
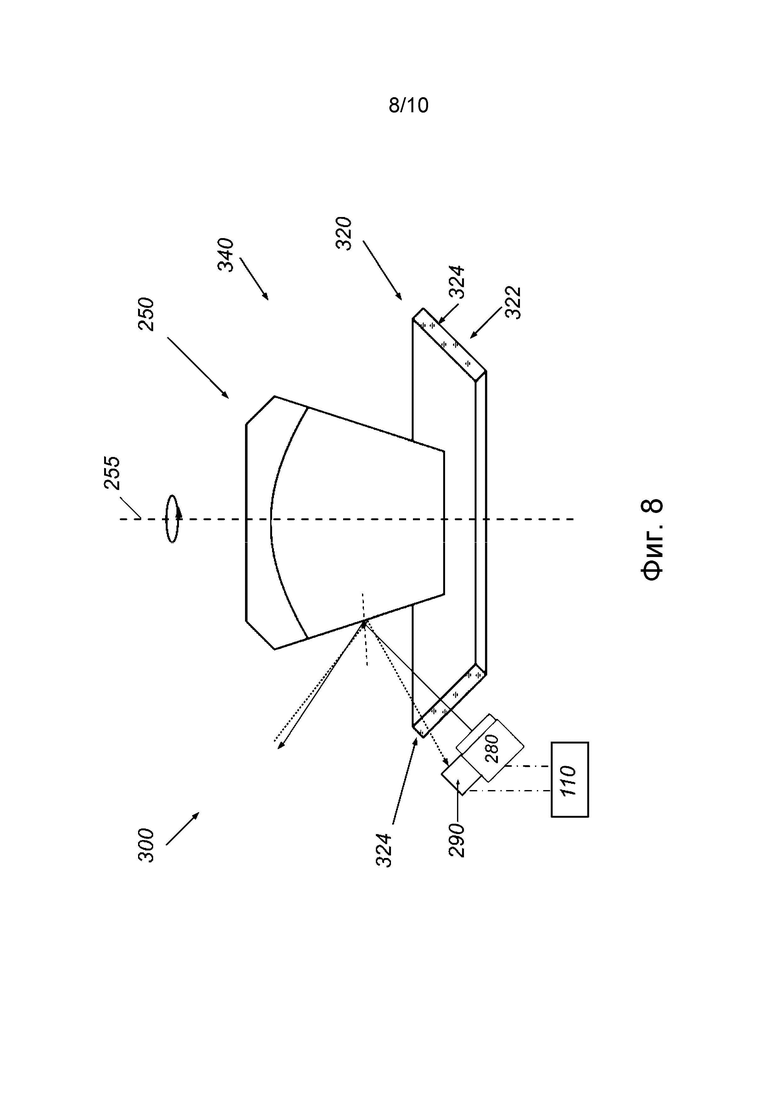
[055] На фиг. 8 представлен разрез 8-8 лидарной системы согласно фиг. 7.
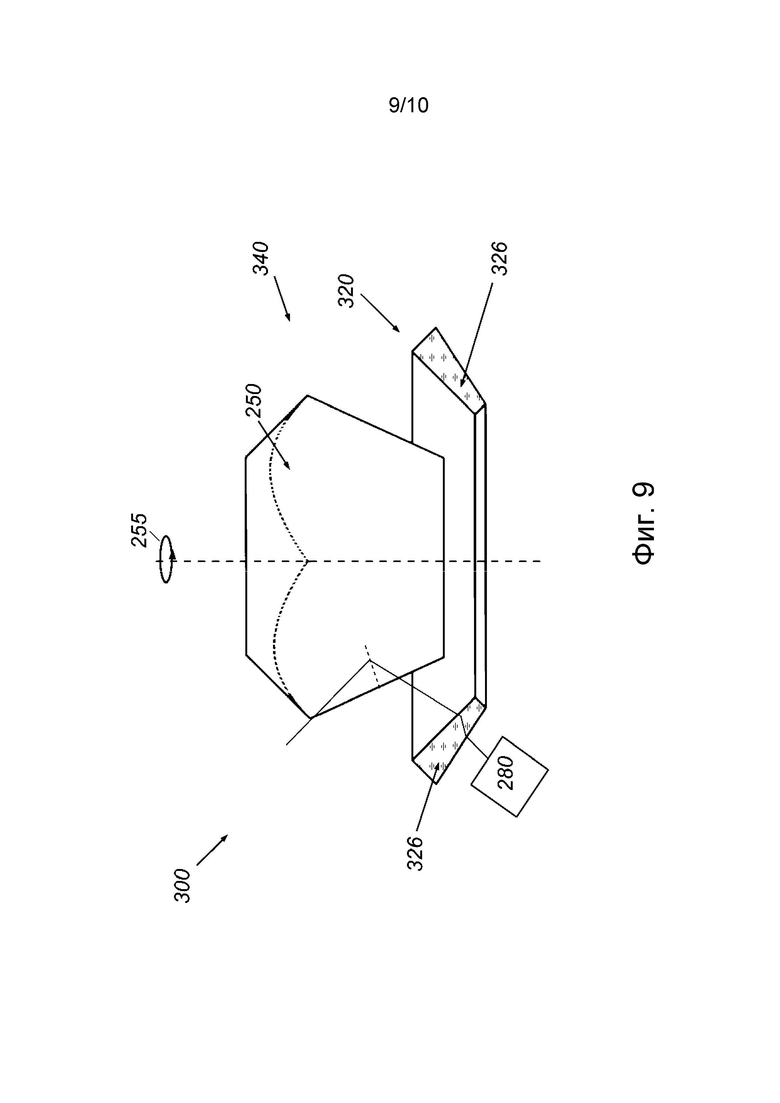
[056] На фиг. 9 представлен разрез 9-9 лидарной системы согласно фиг. 7.
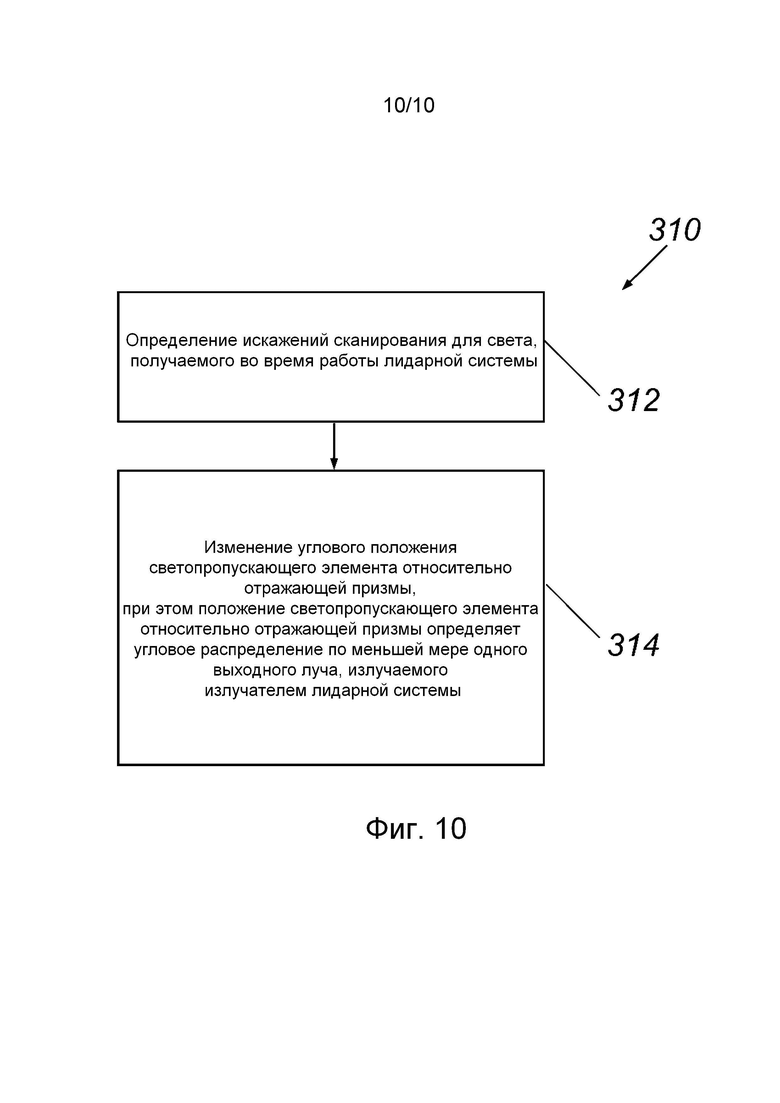
[057] На фиг. 10 приведена блок-схема способа регулировки лидарной системы согласно фиг. 7.
[058] Если не указано иное, в чертежах могут быть отклонения от масштаба.
Осуществление изобретения
[059] Представленные здесь примеры и условный язык предназначены для обеспечения лучшего понимания принципов настоящей технологии, а не для ограничения ее объема до таких специально приведенных примеров и условий. Должно быть понятно, что специалисты в данной области техники способны разработать различные способы и устройства, которые явно не описаны и не показаны, но реализуют принципы настоящей технологии в пределах ее существа и объема.
[060] Кроме того, чтобы способствовать лучшему пониманию, последующее описание может содержать упрощенные варианты реализации настоящей технологии. Специалистам в данной области должно быть понятно, что другие варианты осуществления настоящей технологии могут быть значительно сложнее.
[061] В некоторых случаях приводятся полезные примеры модификаций настоящей технологии. Они способствуют пониманию, но также не определяют объема или границ настоящей технологии. Представленный перечень модификаций не является исчерпывающим и специалист в данной области может разработать другие модификации в пределах объема настоящей технологии. Кроме того, если в некоторых случаях модификации не описаны, это не означает, что они невозможны и/или что описание содержит единственно возможный вариант реализации того или иного элемента настоящей технологии.
[062] Описание принципов, аспектов и вариантов реализации настоящей технологии, а также их конкретные примеры, предназначены для охвата их структурных и функциональных эквивалентов, независимо от того, известны они в настоящее время или будут разработаны в будущем. Например, специалистам в данной области техники должно быть понятно, что любые описанные здесь структурные схемы соответствуют концептуальным представлениям иллюстративных принципиальных схем, реализующих основы настоящей технологии. Также должно быть понятно, что любые блок-схемы, схемы процессов, диаграммы изменения состояния, псевдокоды и т.п. соответствуют различным процессам, которые могут быть представлены на машиночитаемом физическом носителе информации и могут выполняться компьютером или процессором, независимо от того, показан такой компьютер или процессор явно или нет.
[063] Далее с учетом вышеизложенных принципов рассмотрены некоторые не имеющие ограничительного характера примеры, иллюстрирующие различные варианты реализации аспектов настоящей технологии.
[064] На фиг. 1 представлена схема сетевой вычислительной среды 100, пригодной для использования с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии. Сетевая вычислительная среда 100 содержит электронное устройство 110, связанное с транспортным средством 120 и/или с пользователем (не показан), связанным с транспортным средством 120 (таким как оператор транспортного средства 120). Сетевая вычислительная среда 100 также содержит сервер 135, соединенный с электронным устройством 110 через сеть 140 связи (такую как сеть Интернет и т.п., как более подробно описано ниже).
[065] На фиг. 2 представлена схема варианта осуществления электронного устройства 110, пригодного для использования с некоторыми вариантами реализации настоящей технологии. Электронное устройство 110 содержит различные элементы аппаратных средств, включая один или несколько одно- или многоядерных процессоров, обобщенно представленных процессором 113, твердотельный накопитель 115 и память 117, которая может представлять собой ОЗУ или память любого другого вида.
[066] Связь между различными элементами устройства 110 может осуществляться через одну или несколько внутренних и/или внешних шин (не показаны) (таких как шина PCI, шина USB, шина FireWire стандарта IEEE 1394, шина SCSI, шина Serial-ATA и т.д.), с которыми различные аппаратные элементы соединены электронными средствами. Согласно вариантам осуществления настоящей технологии, твердотельный накопитель 115 хранит программные команды, пригодные для загрузки в память 117 и исполнения процессором 113 для определения наличия объекта. Например, программные команды могут входить в состав управляющего приложения транспортного средства, выполняемого процессором 113. Следует отметить, что устройство 110 может содержать дополнительные и/или не обязательные элементы (не показаны), такие как модули передачи данных по сети, модули определения местоположения и т.п.
[067] Согласно настоящей технологии, на реализацию электронного устройства 110 не накладывается особых ограничений. Например, электронное устройство 110 может быть реализовано в виде блока управления двигателем транспортного средства, центрального процессора транспортного средства, автонавигатора (например, TomTom™, Garmin™), планшета, персонального компьютера, встроенного в транспортное средство 120, и т.п. Следует отметить, что электронное устройство 110 может быть связано или не связано с транспортным средством 120 постоянным образом. Дополнительно или в качестве альтернативы, электронное устройство 110 может быть реализовано в устройстве беспроводной связи, таком как мобильный телефон (например, смартфон или радиотелефон). В некоторых вариантах осуществления изобретения электронное устройство 110 содержит дисплей 170.
[068] В настоящем варианте осуществления изобретения электронное устройство 110 содержит элементы компьютерной системы, как представлено на фиг. 2. Тем не менее, некоторые элементы могут быть опущены или модифицированы в зависимости от конкретного варианта осуществления изобретения. В некоторых вариантах осуществления изобретения электронное устройство 110 представляет собой бортовое компьютерное устройство и содержит процессор 113, твердотельный накопитель 115 и память 117. Иными словами, электронное устройство 110 содержит аппаратные средства и/или прикладное программное обеспечение и/или встроенное программное обеспечение либо их сочетание для обработки данных, как более подробно описано ниже.
[069] В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии сетевая вычислительная среда 100 (см. фиг. 1) может содержать спутник системы GPS (не показан), передающий сигнал GPS электронному устройству 110 и/или принимающий сигнал GPS от него. Должно быть понятно, что настоящая технология не ограничивается системой GPS и может использовать технологию определения местоположения, отличную от системы GPS. Следует отметить, что спутник GPS может вообще отсутствовать.
[070] Транспортное средство 120, с которым связано электронное устройство 110, может представлять собой любое транспортное средство для отдыха или иной деятельности, такое как автомобиль для личного или коммерческого использования, грузовой автомобиль, мотоцикл и т.п. Несмотря на то, что транспортное средство 120 изображено в виде наземного транспортного средства, это не обязательно для всех не имеющих ограничительного характера вариантов осуществления настоящей технологии. Например, в некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии транспортное средство 120 может представлять собой водное транспортное средство, такое как лодка, или воздушное транспортное средство, такое как беспилотный летательный аппарат.
[071] Транспортное средство 120 может управляться пользователем или представлять собой самоуправляемое транспортное средство. В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии предполагается, что транспортное средство 120 может быть реализовано в виде самоуправляемого автомобиля (SDC, Self-Driving Car). Следует отметить, что не накладывается ограничений на конкретные параметры транспортного средства 120, такие как производитель транспортного средства, модель транспортного средства, год выпуска транспортного средства, масса транспортного средства, размеры транспортного средства, распределение веса транспортного средства, площадь поверхности транспортного средства, высота транспортного средства, вид трансмиссии (например, привод на два или на четыре колеса), вид шин, тормозная система, топливная система, пробег, идентификационный номер транспортного средства, рабочий объем двигателя и т.д.
[072] В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии сеть 140 связи представляет собой сеть Интернет. В альтернативных не имеющих ограничительного характера вариантах осуществления настоящей технологии сеть 140 связи может быть реализована в виде любой подходящей локальной сети (LAN, Local Area Network), глобальной сети (WAN, Wide Area Network), частной сети связи и т.п. Очевидно, что варианты реализации сети 140 связи приведены лишь в иллюстративных целях. Реализация линии связи (отдельно не обозначена) между электронным устройством 110 и сетью 140 связи зависит, среди прочего, от реализации электронного устройства 110. В качестве не имеющего ограничительного характера примера, в тех не имеющих ограничительного характера вариантах осуществления настоящей технологии, где электронное устройство 110 реализовано в виде устройства беспроводной связи, такого как смартфон или навигационное устройство, линия связи может быть реализована в виде беспроводной линии связи. Примеры беспроводных линий связи могут включать в себя канал сети связи 3G, канал сети связи 4G и т.п. В сети 140 связи также может использоваться беспроводное соединение с сервером 135.
[073] В некоторых вариантах осуществления настоящей технологии сервер 135 реализован в виде компьютерного сервера и может содержать некоторые или все элементы устройства 110, представленного на фиг. 2, такие как процессоры, твердотельные накопители и/или запоминающие устройства. В одном не имеющем ограничительного характера примере сервер 135 реализован в виде сервера Dell™ PowerEdge™, работающего под управлением операционной системы Microsoft™ Windows Server™, но он также может быть реализован с использованием любых других подходящих аппаратных средств, прикладного программного обеспечения и/или встроенного программного обеспечения либо их сочетания. В представленных не имеющих ограничительного характера вариантах осуществления настоящей технологии сервер 135 представляет собой один сервер. В других не имеющих ограничительного характера вариантах осуществления настоящей технологии функции сервера 135 могут быть распределены между несколькими серверами (не показаны).
[074] В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии процессор 113 электронного устройства 110 может быть связан с сервером 135 для получения одного или нескольких обновлений. Такие обновления могут содержать обновления программного обеспечения, обновления карт, обновления маршрутов, обновления данных о погоде и т.п. В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии процессор 113 также может отправлять серверу 135 некоторые рабочие данные, такие как пройденные маршруты, данные о дорожном движении, рабочие характеристики и т.п. Некоторые или все такие данные, передаваемые между транспортным средством 120 и сервером 135, могут быть зашифрованы и/или обезличены.
[075] Следует отметить, что электронное устройство 110 может использовать множество датчиков и систем для сбора информации об окрестности 150 транспортного средства 120. Как показано на фиг. 1, транспортное средство 120 может быть оснащено множеством систем 180 датчиков. Следует отметить, что для сбора данных различных видов об окрестности 150 транспортного средства 120 могут использоваться различные системы датчиков из множества систем 180 датчиков.
[076] В одном примере множество систем 180 датчиков может содержать различные оптические системы, включая, среди прочего, одну или несколько систем датчиков вида «камера», установленных на транспортном средстве 120 и связанных с процессором 113 электронного устройства 110. В общем случае одна или несколько систем датчиков вида «камера» могут собирать данные изображения о различных частях окрестности 150 транспортного средства 120. В некоторых случаях данные изображения, предоставленные одной или несколькими системами датчиков вида «камера», могут быть использованы электронным устройством 110 для выполнения процедур обнаружения объекта. Например, электронное устройство 110 может вводить данные изображения, предоставленные одной или несколькими системами датчиков вида «камера», в нейронную сеть обнаружения объектов (ODNN, Object Detection Neural Network), обученную выявлению и классификации потенциальных объектов в окрестности 150 транспортного средства 120.
[077] В другом примере множество систем 180 датчиков может содержать одну или несколько радиолокационных систем датчиков, установленных на транспортном средстве 120 и связанных с процессором 113. В общем случае одна или несколько радиолокационных систем датчиков могут использовать радиоволны, чтобы собирать данные о различных частях окрестности 150 транспортного средства 120. Например, одна или несколько радиолокационных систем датчиков могут собирать радиолокационные данные о потенциальных объектах в окрестности 150 транспортного средства 120, при этом такие данные потенциально могут представлять расстояние от радиолокационной системы датчиков до объектов, ориентацию объектов, скорость объектов и т.п.
[078] Следует отметить, что множество систем 180 датчиков может содержать системы датчиков других видов в дополнение к частично описанным выше без выхода за границы настоящей технологии.
[079] Согласно настоящей технологии, транспортное средство 120 оснащено по меньшей мере одной лидарной системой, такой как лидарная система 200, для сбора информации об окрестности 150 транспортного средства 120 (см. фиг. 1). Несмотря на то, что здесь описан случай крепления на транспортном средстве 120, также предполагается, что лидарная система 200 может работать автономно или может быть связана с другой системой. Несмотря на то, что такой вариант не показан, также предполагается, что описанная здесь лидарная система 300 может быть связана с транспортным средством 120 вместо лидарной системы 200 или в дополнение к ней.
[080] В зависимости от варианта осуществления изобретения транспортное средство 120 может содержать больше или меньше лидарных систем 200, чем показано. В зависимости от конкретного варианта осуществления изобретения применение конкретных систем из множества систем 180 датчиков может зависеть от конкретного варианта осуществления лидарной системы 200. Лидарная система 200 может быть установлена на транспортном средстве 120 изначально или при его модернизации в различных местах и/или в различных конфигурациях.
[081] Например, в зависимости от варианта реализации транспортного средства 120 и лидарной системы 200, лидарная система 200 может быть установлена с внутренней стороны в верхней части ветрового стекла транспортного средства 120. Тем не менее, как показано на фиг. 1, в пределах объема настоящей технологии возможны и другие места монтажа лидарной системы 200, включая заднее окно, боковые окна, передний капот, крышу, переднюю решетку, передний бампер или боковую поверхность транспортного средства 120. В некоторых случаях лидарная система 200 может размещаться в специальном кожухе, установленном сверху транспортного средства 120.
[082] В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии, также представленных на фиг. 1, описанные здесь лидарные системы 200, 300 обычно устанавливаются на боковых поверхностях транспортного средства 120. Тем не менее, возможны и другие конфигурации. Например, одна или несколько лидарных систем 200, 300 могут быть установлены в передней части, в задней части или по углам транспортного средства 120.
[083] Независимо от конкретного местоположения и/или конкретной конфигурации, лидарная система 200 способна фиксировать данные об окрестности 150 транспортного средства 120, используемые, например, для построения многомерной карты объектов в окрестности 150 транспортного средства 120. В тех вариантах осуществления изобретения, где лидарная система 200 установлена вне транспортного средства 120, лидарные системы 200 могут фиксировать данные относительно некоторых заранее заданных окрестностей местоположения лидарной системы 200.
[084] Следует отметить, что несмотря на то, что в представленном здесь описании лидарная система 200 реализована в виде лидарной системы на основе времени пролета (ToF, Time of Flight) сигнала и, следовательно, содержит соответствующие элементы, подходящие для ее реализации, также возможны и другие варианты реализации лидарной системы 200 без выхода за границы настоящей технологии.
[085] Ниже со ссылкой на фиг. 3-5 более подробно описана лидарная система 200 согласно одному не имеющему ограничительного характера варианту осуществления настоящей технологии. Следует отметить, что лидарная система 200 показана схематически и что специалисту в данной области техники должны быть понятны дополнительные узлы и/или элементы, необходимые для работы лидарной системы 200.
[086] В общем случае лидарная система 200 содержит множество внутренних элементов, в числе прочего, таких как (а) излучатель 280, способный излучать по меньшей мере один луч света (также называется лазерным источником или источником света), (б) светоделительный элемент (не показан), (в) вращающийся сканирующий элемент 240 (также называется блоком сканера), (г) детектор 290 (показан на фиг. 4), способный принимать входные лучи (также называется системой обнаружения или блоком приема), и (д) контроллер (в данном случае электронное устройство 110). Предполагается, что в дополнение к представленным выше элементам, не составляющим исчерпывающего перечня, лидарная система 200 может содержать множество элементов (таких как датчики, оптические устройства управления лучом, механические конструкции, корпус и т.д.), которые опущены на чертежах для упрощения. В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии один или несколько внутренних элементов лидарной системы 200 размещены в общем корпусе (не показан).
[087] В общем случае лидарная система 200 работает следующим образом. Излучатель 280 лидарной системы 200 излучает световые импульсы, образующие выходной луч (сплошные линии со стрелкой на фиг. 4). Сканирующий элемент 240 сканирует выходным лучом в пределах окрестности 150 транспортного средства 120 с целью определения местоположения или фиксации данных о заранее неизвестных объектах, например, для формирования карты окрестности 150, на которой объекты представлены в виде одной или нескольких точек данных. Ниже сканирующий элемент 240 описан более подробно.
[088] Когда выходной луч достигает одного или нескольких объектов в окрестности, объект обычно отражает по меньшей мере часть света из выходного луча и некоторые отраженные лучи света могут возвращаться в лидарную систему 200, где принимаются в виде входного луча (пунктирная линия на фиг. 4). Следует отметить, что часть света из выходного луча может поглощаться или рассеиваться объектами в окрестности.
[089] Входной луч, достигший лидарной системы 200, принимается сканирующим элементом 240 и направляется им в детектор 290. Затем входной луч захватывается и обнаруживается детектором 290. В ответ детектор 290 способен формировать один или несколько репрезентативных сигналов данных. Например, детектор 290 может формировать выходной электрический сигнал (не показан), представляющий входной луч. Детектор 290 также может выдавать сформированный таким образом электрический сигнал в контроллер 110 для дальнейшей обработки. Наконец, контроллер 110 рассчитывает расстояние (или расстояния) до объектов в окрестности 150 путем измерения времени между излучением выходного луча и приемом входного луча.
[090] Излучатель 280 связан с контроллером 110 и способен излучать свет с рабочей длиной волны. С этой целью в некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии излучатель 280 может содержать по меньшей мере один лазер, предназначенный для работы с заданной рабочей длиной волны. Рабочая длина волны излучателя 280 света может соответствовать инфракрасной, видимой и/или ультрафиолетовой частям электромагнитного спектра. В общем случае рабочая длина волны может ограничиваться такими факторами, как технические характеристики полосового фильтра, размещенного в системе, чувствительность детекторов системы и т.д. Например, излучатель 280 может содержать по меньшей мере один лазер с рабочей длиной волны в диапазоне приблизительно 650-1150 нм. В качестве альтернативы, излучатель 280 может содержать лазерный диод, способный излучать свет с длиной волны в диапазонах приблизительно 800-1000 нм, приблизительно 850-950 нм или приблизительно 1300-1600 нм. В некоторых других вариантах осуществления изобретения излучатель 280 может содержать светодиод.
[091] Обычно излучатель 280 представляет собой безопасный для зрения лазер, иными словами, лидарная система 200 может быть классифицирована как безопасная для зрения лазерная система или лазерное изделие. В общем случае безопасный для зрения лазер, лазерная система или лазерное изделие может представлять собой систему, в которой некоторые или все параметры из числа длины волны излучения, средней мощности, пиковой мощности, пиковой интенсивности, энергии импульса, размера луча, расходимости луча, продолжительности воздействия или сканирующего выходного луча таковы, что риск повреждения глаз человека излученным из этой системы светом незначителен или полностью отсутствует.
[092] Для выполнения лидарных измерений времени пролета излучатель 280 обычно представляет собой импульсный источник, способный формировать и излучать импульсы света с конкретной длительностью импульса. Например, в некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии излучатель 280 может излучать импульсы с длительностью импульса (т.е. с шириной импульса) от 10 пс до 100 нс. В других не имеющих ограничительного характера вариантах осуществления настоящей технологии излучатель 280 может излучать импульсы с частотой повторения импульсов приблизительно от 100 кГц до 5 МГц или с периодом импульсов (т.е. со временем между следующими друг за другом импульсами) приблизительно от 200 нс до 10 мкс. Тем не менее, в общем случае излучатель 280 может формировать выходной луч с любой подходящей средней оптической мощностью и выходной луч может содержать оптические импульсы с любой подходящей для данного варианта применения энергией импульса или пиковой оптической мощностью.
[093] В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии излучатель 280 может содержать один или несколько лазерных диодов, включая, в числе прочего, лазерный диод Фабри-Перо, лазер на квантовой яме, лазер DBR, лазер DFB или лазер VCSEL. Например, лазерный диод, работающий в излучателе 280, может представлять собой лазерный диод на арсениде алюминия-галлия (AlGaAs), лазерный диод на арсениде галлия-индия (InGaAs), лазерный диод на арсениде-фосфиде галлия-индия (InGaAsP) или любой другой подходящий лазерный диод. Также предполагается, что излучатель 280 может содержать один или несколько лазерных диодов с модуляцией током для формирования оптических импульсов.
[094] В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии излучатель 280 способен излучать по существу коллимированный выходной луч. Тем не менее, предполагается, что формируемый луч может иметь любую подходящую для данного варианта применения расходимость луча. В общем случае расходимость выходного луча представляет собой угловую меру увеличения размера поперечного сечения луча (например, радиуса луча или диаметра луча) по мере удаления выходного луча от излучателя 280 или от лидарной системы 200. В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии выходной луч может иметь практически круглое поперечное сечение. Также предполагается, что выходной луч, излученный излучателем 280, может быть неполяризованным или поляризованным случайным образом, может не иметь конкретной или фиксированной поляризации (например, поляризация может изменяться с течением времени) или может иметь конкретную поляризацию (например, выходной луч может иметь линейную поляризацию, эллиптическую поляризацию или круговую поляризацию).
[095] В по меньшей мере некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии выходной луч и входной луч могут быть по существу соосными. Иными словами, выходной луч и входной луч могут по меньшей мере частично перекрываться или иметь общую ось распространения так, чтобы входной луч и выходной луч распространялись вдоль по существу одного и того же оптического пути (но в противоположных направлениях). Тем не менее, в других не имеющих ограничительного характера вариантах осуществления настоящей технологии выходной луч и входной луч могут быть несоосными или, иными словами, могут не перекрываться или не иметь общей оси распространения внутри лидарной системы 200 без выхода за границы настоящей технологии. На схемах, представленных на чертежах, выходной и входной лучи показаны на некотором расстоянии друг от друга лишь для удобства обозначения.
[096] В зависимости от варианта осуществления изобретения, контроллер, связанный с излучателем 280 и с детектором 290, может содержать один или несколько процессоров, схему ASIC, матрицу FPGA и/или другую подходящую схему. Реализованный в настоящих вариантах осуществления изобретения в виде электронного устройства 110, контроллер 110 также может содержать машиночитаемую физическую память для хранения команд, исполняемых контроллером 110, и данных, которые контроллер 110 может формировать на основе сигналов, полученных от других внутренних элементов лидарной системы 200 и/или выдаваемых другим внутренним элементам лидарной системы 200. Память может содержать энергозависимые (например, ОЗУ) и/или энергонезависимые (например, флэш-память, жесткий диск) элементы. Контроллер 110 может формировать данные во время работы и сохранять их в памяти. Например, данные, сформированные контроллером 110, могут указывать на точки данных в облаке точек данных о расстоянии от лидарной системы 200. Помимо сбора данных от детектора 290, контроллер 110 также может выдавать управляющие сигналы излучателю 280 и детектору 290 и потенциально принимать от них диагностические данные.
[097] В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии контроллер 110 может получать от излучателя 280 электрические запускающие импульсы, каждый из которых соответствует излучению оптического импульса излучателем 280. Контроллер 110 также может выдавать в излучатель 280 команды, управляющий сигнал и/или запускающий сигнал, указывающие на то, когда излучатель 280 должен формировать оптические импульсы, например, образующие выходной луч. Также предполагается, что контроллер 110 может инициировать корректировку излучателем 280 одной или нескольких характеристик выходного луча, формируемого излучателем 280, таких как частота, период, длительность, энергия импульса, пиковая мощность, средняя мощность, длина волны оптических импульсов и т.д.
[098] Согласно настоящей технологии, контроллер 110 способен определять значение времени пролета для оптического импульса с целью определения расстояния между лидарной системой 200 и одним или несколькими объектами в поле зрения, как описано ниже. Время пролета основано на информации о времени, связанной (а) с первым моментом времени излучения оптического импульса (например, выходного луча) излучателем 280 и (б) со вторым моментом времени обнаружения или приема части оптического импульса (например, из входного луча) детектором 290, в частности, с моментом времени обнаружения входного луча детектором 290. В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии первый момент может указывать на момент времени выдачи контроллером 110 соответствующего электрического импульса, связанного с оптическим импульсом, а второй момент времени может указывать на момент времени получения контроллером 110 от детектора 290 электрического сигнала, сформированного в ответ на получение части оптического импульса из входного луча.
[099] Согласно настоящей технологии, контроллер 110 способен на основе первого момента времени и второго момента времени определять значение времени пролета и/или значение фазовой модуляции для излученного импульса из выходного луча. Значение времени T пролета, в известном смысле, соответствует времени пролета излученного импульса в обоих направлениях: от лидарной системы 200 до объекта и обратно до лидарной системы 200. Таким образом, контроллер 110 может определять расстояние до объекта согласно следующему уравнению:
 (1)
(1)
где D - расстояние, которое требуется определить, T - значение времени пролета, c - скорость света (приблизительно 3,0×108 м/с).
[0100] Следует отметить, что в различных не имеющих ограничительного характера вариантах осуществления настоящей технологии лидарная система 200 может содержать дополнительные оптические элементы. Например, лидарная система 200 может содержать один или несколько оптических элементов, способных обрабатывать, изменять форму, фильтровать, модифицировать или направлять выходной луч и/или входной луч. Например, лидарная система 200 может содержать одну или несколько линз, зеркал, фильтров (например, полосовых или интерференционных фильтров), оптических волокон, циркуляторов, светоделителей, поляризаторов, поляризационных светоделителей, волновых пластин (например, полуволновых или четвертьволновых пластин), дифракционных элементов, микроэлектромеханических элементов, коллимационных элементов или голографических элементов.
[0101] В общем случае вращающийся сканирующий элемент 240 направляет выходной луч в одном или в нескольких направлениях в сторону окрестности 150, а также направляет входной луч, прибывший в лидарную систему 300 в обратном направлении, в детектор 290. Вращающийся сканирующий элемент 240 связан с контроллером 110. Контроллер 110 способен управлять вращающимся сканирующим элементом 240 так, чтобы направлять выходной луч в требуемом направлении и/или согласно заранее заданной схеме сканирования. В общем случае в контексте настоящего описания схема сканирования может соответствовать схеме или траектории, согласно которой выходной луч направляется вращающимся сканирующим элементом 240 во время работы.
[0102] Ниже со ссылкой на фиг. 3-5 вращающийся сканирующий элемент 240 описан более подробно. Вращающийся сканирующий элемент 240 способен получать выходной луч света и сканировать выходными лучами за пределами системы 200 путем вращения вокруг оси 255 вращения. Предполагается, что в некоторых случаях сканирующий элемент 240 может управляться так, чтобы он колебался в двух направлениях, а не вращался в одном направлении. В настоящем варианте осуществления изобретения вращающийся сканирующий элемент 240 содержит отражающую призму 250 и кольцевой элемент 220, жестко соединенный с отражающей призмой 250. Лидарная система 200 способна выполнять периферийное сканирование с использованием сканирующего элемента 240. Как показано в настоящем не имеющем ограничительного характер примере, лидарная система 200 выполнена с возможностью ее крепления к самоуправляемому транспортному средству 120 на его боковой поверхности. Тем не менее, предполагается, что конкретное размещение лидарной системы 200 на транспортном средстве 120 может варьироваться.
[0103] На отражающей призме 250 предусмотрены четыре грани, наклоненные относительно оси 255 вращения. В частности, четыре отражающие грани отражающей призмы 250 скошены относительно оси 255 вращения. В по меньшей мере некоторых вариантах осуществления изобретения предполагается, что отражающая призма 250 может быть выполнена с более чем с четырьмя гранями. В настоящем варианте осуществления изобретения отражающая призма 250 имеет по существу пирамидальную форму и, в частности, форму усеченной четырехгранной пирамиды. Отражающая призма 250 установлена так, что сторона усеченной пирамиды большего размера расположена выше стороны меньшего размера, при этом выходной луч из излучателя 280, расположенного по существу под отражающей призмой 250, принимается, как правило, из-под отражающей призмы 250, а затем в основном направляется наружу. Как показано на фиг. 4, излучатель 280 также выполнен с возможностью излучения выходного луча под углом относительно оси 255 вращения сканирующего элемента 240.
[0104] Вращающийся сканирующий элемент 240 дополнительно содержит кольцевой элемент 220, соединенный с отражающей призмой 250. Кольцевой элемент 220 жестко соединен с отражающей призмой 250 так, что во время работы лидарной системы 200 кольцевой элемент 220 и отражающая призма 250 вращаются вместе в фиксированном относительном угловом положении. Несмотря на то, что это не показано здесь, система крепления, обеспечивающая угловое смещение кольцевого элемента 220 относительно отражающей призмы 250, дополнительно имеет возможность регулировки пользователем относительного углового положения для калибровки вращающегося сканирующего элемента 240.
[0105] Внутренняя поверхность 222 кольцевого элемента 220 расположена вокруг оси 255 по существу в плоскости, параллельной оси 255 вращения. Внутренняя поверхность 222 расположена под переменным углом относительно оси 255. В частности, нормаль к внутренней поверхности 222 изменяется от перпендикулярной относительно оси вращения 255 (см. фиг. 4) до наклонной относительно оси вращения 255 (см. фиг. 5). В представленном варианте осуществления изобретения форма наружной поверхности кольцевого элемента 220 по существу соответствует форме внутренней поверхности 222 так, что толщина кольцевого элемента 220 по существу постоянная. Также предполагается, что наружная поверхность кольцевого элемента 220 может быть кругообразно симметричной и по существу параллельной оси 255 (при изменяющейся толщине кольцевого элемента 220).
[0106] Как показано на фиг. 3, кольцевой элемент 220 имеет по меньшей мере две плоскости симметрии, каждая из которых содержит ось 255 вращения отражающей призмы 250. Две из этих плоскостей симметрии показаны линиями 4-4 и 5-5. Предполагается, что в различных вариантах осуществления кольцевого элемента 220 может быть больше или меньше плоскостей симметрии. Например, кольцевые элементы, выполненные с возможностью работы с призмами с количеством граней больше или меньше четырех, могут иметь другую угловую форму.
[0107] Внутренняя поверхность 222 кольцевого элемента 220 имеет четыре зоны 224 параллельной поверхности, где по меньшей мере часть внутренней поверхности 222 по существу параллельна оси 255 вращения (см. фиг. 4). Зоны 224 параллельной поверхности расположены друг напротив друга относительно оси 255 вращения. Внутренняя поверхность 222 имеет четыре зоны 226 наклонной поверхности, где по меньшей мере часть внутренней поверхности 222 расположена под углом к оси 255 вращения. Внутренняя поверхность 222 кольцевого элемента 220, расположенного вокруг оси 255 вращения, содержит чередующиеся зоны 224 параллельной поверхности и зоны 226 наклонной поверхности. Следует отметить, что внутренняя поверхность 222 плавно изменяется на переходах между зоной 224 параллельной поверхности и соседней зоной 246 наклонной поверхности таким образом, что отсутствуют резкие переходы или границы на отражающей поверхности, которую образует внутренняя поверхность 222.
[0108] Кольцевой элемент 220 по существу расположен между излучателем 280 и отражающей призмой 250 вдоль направления, соответствующего оси 255 вращения. Согласно представленной ориентации лидарной системы 200, кольцевой элемент 220 расположен вертикально между верхней гранью отражающей призмы 250 и нижней гранью излучателя 280. Следует отметить, что лидарная система 200 может применяться при различных ориентациях, а описанные здесь направления используются лишь для удобства объяснения. Как описано выше, когда лидарная система 200 не используется, кольцевой элемент 220 может селективно поворачиваться относительно отражающей призмы 250 так, что угол падения выходного луча на отражающую призму 250 может регулироваться в соответствии с угловым положением кольцевого элемента 220 относительно отражающей призмы 250.
[0109] Согласно настоящей технологии, излучатель 280, детектор 290 и вращающийся сканирующий элемент 240 выполнены так, что выходной луч падает на внутреннюю поверхность 222 кольцевого элемента 220, а затем на одну из четырех граней отражающей призмы 250. Таким образом, угол падения выходного луча на грань отражающей призмы 250 зависит от переменного угла кольцевого элемента 220, в частности, внутренней поверхности 222. Таким образом, положение кольцевого элемента 220 относительно отражающей призмы 250 определяет распределение выходного луча в различных положениях сканирующего элемента 240, что, в свою очередь, определяет однородность или неоднородность плотности точек данных карты, формируемой лидарной системой 200. Благодаря регулировке углов падения на отражающую призму 250, которую обеспечивает внутренняя поверхность 222 с переменным углом кольцевого элемента 220, искажения облака точек в поле зрения могут быть откалиброваны.
[0110] На фиг. 6 представлен не имеющий ограничительного характера вариант осуществления способа 210 коррекции искажений сканирования лидарной системы, в частности, лидарной системы 200, согласно настоящему варианту осуществления изобретения.
[0111] Способ 210 на шаге 214 включает в себя изменение углового положения кольцевого элемента 220 относительно отражающей призмы 250. Как описано выше, положение кольцевого элемента 220 относительно отражающей призмы 250 определяет распределение выходного луча, излучаемого излучателем 280, и, в частности, его равномерность. Таким образом, коррекция искажений сканирования связана с регулировкой распределения выходных лучей, поскольку относительная группировка выходных лучей (распределение лучей) непосредственно связана с углом падения выходного луча на отражающую призму 250, который, в свою очередь, может регулироваться с использованием различных частей внутренней поверхности 222 кольцевого элемента 220.
[0112] В по меньшей мере некоторых вариантах осуществления изобретения способ 210 начинается с шага 212, на котором контроллер 110 сначала определяет искажения сканирования для света, получаемого во время работы лидарной системы 200. Способ 210 может выполняться в виде калибровки, чтобы наилучшим образом обеспечивать распределение выходного луча в разных частях поля зрения. Изменение углового положения кольцевого элемента 220 на шаге 214 основано на искажениях сканирования, определенных на шаге 212.
[0113] В по меньшей мере некоторых вариантах осуществления изобретения изменение углового положения кольцевого элемента 220 относительно отражающей призмы 250 включает в себя позиционирование кольцевого элемента 220 так, чтобы минимизировать искажения сканирования для по меньшей мере части диапазона угла поворота вращающегося сканирующего элемента 240 во время работы.
[0114] На фиг. 7-9 представлен другой не имеющий ограничительного характера вариант осуществления лидарной системы 300. Следует отметить, что лидарная система 300 показана схематически, и специалисту в данной области техники должны быть понятными дополнительные узлы и/или элементы, необходимые для работы лидарной системы 300. Элементы лидарной системы 300, схожие с элементами лидарной системы 200, имеют те же позиционные обозначения и обычно повторно не описываются.
[0115] В общем случае лидарная система 300 содержит множество внутренних элементов, в числе прочего, таких как (а) излучатель 280, (б) светоделительный элемент (не показан), (в) вращающийся сканирующий элемент 340, (г) детектор 290 (показан на фиг. 8) и (д) контроллер (в данном случае электронное устройство 110). Предполагается, что в дополнение к представленным выше элементам, не составляющим исчерпывающего перечня, лидарная система 300 может содержать множество элементов (таких как датчики, оптические устройства управления лучом, механические конструкции, корпус и т.д.), которые опущены на чертежах для упрощения. В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии один или несколько внутренних элементов лидарной системы 300 размещены в общем корпусе (не показан).
[0116] В общем случае лидарная система 300 работает следующим образом. Излучатель 280 лидарной системы 300 излучает световые импульсы, образующие выходной луч (сплошные линии со стрелкой на фиг. 8), а вращающийся сканирующий элемент 340 сканирует выходным лучом в пределах окрестности 150 транспортного средства 120 с целью определения местоположения или фиксации данных о заранее неизвестных объектах, например, для формирования карты окрестности 150, на которой объекты представлены в виде одной или нескольких точек данных. Ниже более подробно описан вращающийся сканирующий элемент 340.
[0117] Когда выходной луч достигает одного или нескольких объектов в окрестности, объект обычно отражает по меньшей мере часть света из выходного луча, и некоторые отраженные лучи света могут возвращаться в лидарную систему 300, где принимаются в виде входного луча (штриховая линия на фиг. 8). Следует отметить, что часть света из выходного луча может поглощаться или рассеиваться объектами в окрестности.
[0118] Входной луч, достигший лидарной системы 300, принимается вращающимся сканирующим элементом 340 и направляется им в детектор 290. Затем входной луч захватывается и обнаруживается детектором 290. В ответ детектор 290 способен формировать один или несколько репрезентативных сигналов данных. Например, детектор 290 может формировать выходной электрический сигнал (не показан), представляющий входной луч. Детектор 290 также может выдавать сформированный таким образом электрический сигнал в контроллер 110 для дальнейшей обработки. Наконец, контроллер 110 рассчитывает расстояние (или расстояния) до объектов в окрестности 150 путем измерения времени между излучением выходного луча и приемом входного луча.
[0119] Следует отметить, что в различных не имеющих ограничительного характера вариантах осуществления настоящей технологии лидарная система 300 может содержать дополнительные оптические элементы. Например, лидарная система 300 может содержать один или несколько оптических элементов, способных обрабатывать, изменять форму, фильтровать, модифицировать или направлять выходной луч и/или входной луч. Например, лидарная система 300 может содержать одну или несколько линз, зеркал, фильтров (например, полосовых или интерференционных фильтров), оптических волокон, циркуляторов, светоделителей, поляризаторов, поляризационных светоделителей, волновых пластин (например, полуволновых или четвертьволновых пластин), дифракционных элементов, микроэлектромеханических элементов, коллимационных элементов или голографических элементов.
[0120] В общем случае вращающийся сканирующий элемент 340 направляет выходной луч в одном или в нескольких направлениях в сторону окрестности 150, а также направляет входной луч, прибывший в лидарную систему 300 в обратном направлении, в детектор 290. Вращающийся сканирующий элемент 340 связан с контроллером 110. Контроллер 110 способен управлять вращающимся сканирующим элементом 340 так, чтобы направлять выходной луч в требуемом направлении и/или согласно заранее заданной схеме сканирования. В общем случае в контексте настоящего описания схема сканирования может соответствовать схеме или траектории, согласно которой выходной луч направляется вращающимся сканирующим элементом 340 во время работы.
[0121] Ниже со ссылкой на фиг. 7-9 более подробно описан вращающийся сканирующий элемент 340.
[0122] Вращающийся сканирующий элемент 340 способен получать выходной луч света и сканировать выходными лучами за пределами системы 300 путем вращения отражающей призмы 250 вокруг оси 255 вращения. Предполагается, что в некоторых случаях вращающийся сканирующий элемент 340 может управляться так, чтобы он колебался в двух направлениях, а не вращался в одном направлении. В настоящем варианте осуществления изобретения вращающийся сканирующий элемент 340 содержит отражающую призму 250, описанную выше, и светопропускающий элемент 320, жестко соединенный с отражающей призмой 250. Лидарная система 300 способна выполнять периферийное сканирование с использованием вращающегося сканирующего элемента 340. Как показано в настоящем не имеющем ограничительного характер примере, лидарная система 300 может устанавливаться на боковой поверхности самоуправляемого транспортного средства 120. Тем не менее, предполагается, что конкретное размещение лидарной системы 300 на транспортном средстве 120 может варьироваться.
[0123] Вращающийся сканирующий элемент 340 дополнительно содержит светопропускающий элемент 320, соединенный с отражающей призмой 250. Светопропускающий элемент 320 жестко соединен с отражающей призмой 250 так, что во время работы лидарной системы 300 светопропускающий элемент 320 и отражающая призма 250 вращаются вместе в фиксированном относительном угловом положении. Несмотря на то, что это не показано на иллюстрациях, система крепления, обеспечивающая угловое смещение светопропускающего элемента 320 относительно отражающей призмы 250, дополнительно обеспечивает возможность регулировки пользователем относительного углового положения для калибровки вращающегося сканирующего элемента 340.
[0124] Внешняя краевая часть 322 переменной толщины светопропускающего элемента 320 расположена вокруг оси 255 вращения по существу в плоскости, параллельной оси 255. Светопропускающий элемент 320 имеет по меньшей мере две плоскости симметрии, две из которых показаны линиями 8-8 и 9-9, при этом каждая плоскость симметрии содержит ось 255 вращения. Светопропускающий элемент 320 содержит четыре параллельных краевых участка 324, где первая поверхность светопропускающего элемента 320 по существу параллельна второй поверхности светопропускающего элемента 320 (см. фиг. 8). Параллельные краевые участки 324 вызывают минимальное преломление проходящих через них выходных лучей, при этом первая и вторая поверхности по существу перпендикулярны оси 255 вращения. Светопропускающий элемент 320 также содержит четыре клиновидных участка 326, где по меньшей мере часть первой поверхности не параллельна второй поверхности и образуются участки в форме клина или по существу в форме треугольной призмы. Таким образом, выходные лучи, преломляющиеся при прохождении через четыре клиновидных участка 326, которые толще параллельных участков 324, отклоняются от траектории выходных лучей, проходящих через один из параллельных участков 324.
[0125] Край 322 светопропускающего элемента 320, расположенного вокруг оси 255 вращения, содержит чередующиеся параллельные краевые участки 324 и клиновидные участки 326. Таким образом, выходные лучи попадают на один из участков 324, 326 в зависимости от положения при вращении во время работы. Край 322 плавно изменяется на переходах между параллельным краевым участком 324 и смежным клиновидным участком 326 таким образом, что отсутствуют резкие переходы или резкие границы.
[0126] Как описано выше, светопропускающий элемент 320 может селективно поворачиваться относительно отражающей призмы 250 так, что угол падения выходного луча на отражающую призму 250 может регулироваться в соответствии с угловым положением светопропускающего элемента 320 относительно отражающей призмы 250. Светопропускающий элемент 320 по существу расположен между излучателем 280 и отражающей призмой 250 вдоль направления, соответствующего оси 255 вращения. В частности, излучатель 280 выполнен с возможностью излучения выходного луча света под углом относительно оси 255 вращения вращающегося сканирующего элемента 340.
[0127] Согласно настоящей технологии, излучатель 280, детектор 290 и вращающийся сканирующий элемент 340 выполнены так, что выходной луч света падает на светопропускающий элемент 320 и преломляется им, а затем падает на одну из граней отражающей призмы 250. Угол падения выходного луча на грань зависит от переменной толщины светопропускающего элемента 320. Таким образом, положение светопропускающего элемента 320 относительно отражающей призмы 250 определяет распределение выходного луча в различных положениях вращающегося сканирующего элемента 340, что, в свою очередь, определяет однородность или неоднородность плотности точек данных карты, формируемой лидарной системой 300. Регулировка углов падения на отражающую призму 250, которые обеспечиваются переменной толщиной светопропускающего элемента 320, позволяет откалибровать искажения облака точек в поле зрения.
[0128] На фиг. 12 представлен другой не имеющий ограничительного характера вариант осуществления способа 310 коррекции искажений сканирования лидарной системы, в частности, лидарной системы 300, согласно настоящему варианту осуществления изобретения.
[0129] Способ 310 на шаге 314 включает в себя изменение углового положения светопропускающего элемента 320 относительно отражающей призмы 250. Как описано выше, положение светопропускающего элемента 320 относительно отражающей призмы 250 определяет распределение выходного луча, излучаемого излучателем 280, в частности, его равномерность. Таким образом, коррекция искажений сканирования связана с регулировкой распределения выходных лучей, поскольку относительная группировка выходных лучей (распределение лучей) непосредственно связана с углом падения выходного луча на отражающую призму 250, который, в свою очередь, может регулироваться с использованием различных участков светопропускающего элемента 320.
[0130] В некоторых вариантах осуществления изобретения способ 310 начинается с шага 312, на котором контроллер 110 определяет искажения сканирования для света, получаемого во время работы лидарной системы 300. Например, путем измерения плотности распределения для выходных лучей в разных частях поля зрения, можно выполнять определение или калибровку для регулировки распределения лучей с помощью регулировки угла падения на отражающую призму 250 путем регулировки положения светопропускающего элемента 320 относительно отражающей призмы 250. В таких случаях изменение углового положения светопропускающего элемента 320 на шаге 314 может основываться на определенных искажениях сканирования.
[0131] В по меньшей мере некоторых вариантах осуществления изобретения изменение углового положения светопропускающего элемента 320 относительно отражающей призмы 250 включает в себя позиционирование светопропускающего элемента 320 так, чтобы минимизировать искажения сканирования для по меньшей мере части диапазона угла поворота вращающегося сканирующего элемента 340 во время работы.
[0132] Предполагается, что способы 210, 310 могут включать в себя дополнительные или другие шаги для выполнения дополнительных функций и/или описанных выше шагов. Кроме того, шаги способов 210, 310 могут выполняться в различной последовательности, например, в зависимости от предпочтений пользователя, и не ограничиваются порядком, описанным выше.
[0133] Несмотря на то, что описанные выше варианты реализации приведены со ссылкой на конкретные шаги, выполняемые в определенном порядке, должно быть понятно, что эти шаги могут быть объединены, разделены или что их порядок может быть изменен без выхода за границы настоящей технологии. Соответственно, порядок и группировка шагов не носят ограничительного характера для настоящей технологии.
[0134] Для специалиста в данной области могут быть очевидными возможные изменения и усовершенствования описанных выше вариантов осуществления настоящей технологии. Предшествующее описание приведено лишь в иллюстративных целях, а не для ограничения объема изобретения. Объем охраны настоящей технологии определяется исключительно объемом приложенной формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛИДАРНЫЕ СИСТЕМЫ И СПОСОБЫ | 2021 |
|
RU2829187C1 |
| ЛИДАРНЫЕ СИСТЕМЫ И СПОСОБЫ | 2021 |
|
RU2824434C2 |
| ЛИДАРНЫЕ СИСТЕМЫ И СПОСОБЫ | 2020 |
|
RU2789827C2 |
| Лидарные системы и способы | 2020 |
|
RU2798364C2 |
| Лидарные системы и способы | 2020 |
|
RU2798363C2 |
| ЛИДАРНЫЕ СИСТЕМЫ И СПОСОБЫ С ВЫБОРОЧНЫМ СКАНИРОВАНИЕМ | 2020 |
|
RU2792951C2 |
| ЛИДАРНАЯ СИСТЕМА И СПОСОБ КАЛИБРОВКИ ЛИДАРНОЙ СИСТЕМЫ | 2021 |
|
RU2829904C1 |
| ЛИДАРНАЯ СИСТЕМА И СПОСОБ КАЛИБРОВКИ ЛИДАРНОЙ СИСТЕМЫ | 2021 |
|
RU2829088C1 |
| МУЛЬТИСПЕКТРАЛЬНЫЕ ЛИДАРНЫЕ СИСТЕМЫ И СПОСОБЫ | 2020 |
|
RU2792948C2 |
| ОПТИЧЕСКИЕ СИСТЕМЫ И СПОСОБЫ УПРАВЛЕНИЯ ИМИ | 2020 |
|
RU2793241C2 |



Использование: настоящая технология в целом относится к лидарным системам и способам для обнаружения объектов в окружающей среде автономного транспортного средства. Сущность: лидарная система содержит излучатель, способный излучать по меньшей мере один луч света; детектор, способный принимать свет, отраженный от окружающих объектов; и вращающийся сканирующий элемент, содержащий отражающую призму с по меньшей мере четырьмя гранями, наклоненными относительно оси вращения, и светопропускающий элемент, соединенный с отражающей призмой. Светопропускающий элемент имеет внешнюю краевую часть, расположенную вокруг оси вращения по существу в плоскости, параллельной оси вращения, при этом краевая часть имеет переменную толщину относительно оси вращения, а излучатель, детектор и вращающийся сканирующий элемент выполнены так, что луч света падает на внутреннюю поверхность светопропускающего элемента и преломляется им, а затем падает на одну из по меньшей мере четырех граней отражающей призмы, при этом угол падения луча на грань зависит от переменной толщины светопропускающего элемента. Технический результат: снижение искажений, неоднородностей распределения выходных лучей и изменения плотности выборки. 2 н. и 12 з.п. ф-лы, 10 ил.
1. Лидарная система, содержащая:
- излучатель, выполненный с возможностью излучения по меньшей мере одного луча света;
- детектор, выполненный с возможностью получения света, отраженного от окружающих объектов; и
- вращающийся сканирующий элемент, выполненный с возможностью получения по меньшей мере одного луча света и сканирования по меньшей мере одним лучом света за пределами системы путем вращения вокруг оси вращения, при этом вращающийся сканирующий элемент содержит отражающую призму с по меньшей мере четырьмя гранями, наклоненными относительно оси вращения, и жестко соединенный с отражающей призмой светопропускающий элемент с внешней краевой частью переменной толщины, расположенной вокруг оси вращения по существу в плоскости, параллельной оси вращения,
при этом излучатель, детектор и вращающийся сканирующий элемент выполнены так, что по меньшей мере один луч света падает на светопропускающий элемент и преломляется им, а затем падает на одну из по меньшей мере четырех граней отражающей призмы и угол падения по меньшей мере одного луча на грань зависит от переменной толщины светопропускающего элемента, а отраженный от окружающих объектов свет отражается одной из по меньшей мере четырех граней отражающей призмы в детектор.
2. Лидарная система по п. 1, отличающаяся тем, что светопропускающий элемент имеет по меньшей мере две плоскости симметрии, каждая из которых содержит ось вращения отражающей призмы.
3. Лидарная система по п. 1, отличающаяся тем, что светопропускающий элемент имеет:
- по меньшей мере два параллельных краевых участка, где первая поверхность светопропускающего элемента по существу параллельна второй поверхности светопропускающего элемента, при этом первая и вторая поверхности по существу параллельны оси вращения; и
- по меньшей мере два клиновидных участка, где по меньшей мере часть первой поверхности расположена под углом ко второй поверхности, при этом толщина по меньшей мере двух клиновидных участков превышает толщину по меньшей мере двух параллельных участков.
4. Лидарная система по п. 3, отличающаяся тем, что:
- край светопропускающего элемента содержит параллельные участки и клиновидные участки, чередующиеся вокруг оси вращения светопропускающего элемента; и
- этот край плавно изменяется на переходах между параллельным участком и смежным клиновидным участком.
5. Лидарная система по п. 1, отличающаяся тем, что светопропускающий элемент выполнен с возможностью селективного поворота относительно отражающей призмы так, что угол падения по меньшей мере одного луча на отражающую призму может регулироваться в соответствии с угловым положением светопропускающего элемента относительно отражающей призмы.
6. Лидарная система по п. 1, отличающаяся тем, что светопропускающий элемент по существу расположен между излучателем и отражающей призмой вдоль направления, соответствующего оси вращения.
7. Лидарная система по п. 1, отличающаяся тем, что система выполнена с возможностью выполнения периферийного сканирования.
8. Лидарная система по п. 7, отличающаяся тем, что система выполнена с возможностью ее крепления к самоуправляемому транспортному средству на его боковой поверхности.
9. Лидарная система по п. 1, отличающаяся тем, что отражающая призма имеет по существу пирамидальную форму.
10. Лидарная система по п. 1, отличающаяся тем, что по меньшей мере четыре грани отражающей призмы скошены относительно оси вращения.
11. Лидарная система по п. 1, отличающаяся тем, что излучатель выполнен с возможностью излучения по меньшей мере одного луча света под углом относительно оси вращения сканирующего элемента.
12. Способ коррекции искажений сканирования лидарной системы, содержащей вращающийся сканирующий элемент, включающий в себя изменение углового положения светопропускающего элемента вращающегося сканирующего элемента относительно отражающей призмы вращающегося сканирующего элемента, при этом положение светопропускающего элемента относительно отражающей призмы определяет распределение по меньшей мере одного выходного луча, излучаемого излучателем лидарной системы, а коррекция искажений сканирования связана с регулировкой распределения по меньшей мере одного выходного луча.
13. Способ по п. 12, отличающийся тем, что он дополнительно включает в себя определение контроллером лидарной системы искажений сканирования для света, полученного во время работы лидарной системы, при этом изменение углового положения светопропускающего элемента основано на определенных искажениях сканирования.
14. Способ по п. 13, отличающийся тем, что изменение углового положения светопропускающего элемента относительно отражающей призмы включает в себя позиционирование светопропускающего элемента таким образом, чтобы минимизировать искажения сканирования для по меньшей мере части диапазона угла поворота вращающегося сканирующего элемента во время работы.
| СПОСОБЫ И СИСТЕМЫ НА ОСНОВЕ ЛИДАРА (LIDAR) С РАСШИРЕННЫМ ПОЛЕМ ЗРЕНИЯ НА ОСНОВЕ ПАССИВНЫХ ЭЛЕМЕНТОВ | 2019 |
|
RU2745882C1 |
| ЛИДАРНЫЕ (LIDAR) СПОСОБЫ И СИСТЕМЫ СО СКАНИРОВАНИЕМ С ИЗБИРАТЕЛЬНОЙ ПЛОТНОСТЬЮ НА ОСНОВЕ MEMS | 2019 |
|
RU2752016C2 |
| СИСТЕМА И СПОСОБ ОБНАРУЖЕНИЯ ПРЕПЯТСТВИЙ В СИСТЕМАХ ВОЗДУШНОГО ДВИЖЕНИЯ | 2018 |
|
RU2762151C2 |
| WO 2018209073 A1, 15.11.2018 | |||
| US 20190154804 A1, 23.05.2019. | |||

