Изобретение относится к приводным устройствам и шарнирам манипуляторов, применяемым в робототехнике, в частности, к муфтам, предназначенным для передачи крутящего момента от ведущего к ведомому элементу и предохранения при этом деталей привода/шарнира от чрезмерных нерасчетных нагрузок при превышении крутящим моментом на выходном валу предельного значения. Специфичной областью применения настоящего изобретения также являются задачи, в которых требуется надежная герметизация/изолирование друг от друга деталей, связанных с выходным валом, и деталей, связанных с ведущими частями привода.
Уровень техники
В настоящее время в робототехнике достаточно большое внимание уделяется развитию шарниров с привнесенной упругостью. Преимуществами таких упругих шарниров перед традиционными условно жесткими шарнирами являются возможность точного измерения момента шарнира, а также снижение требований к быстродействию контура управления при ударах, поскольку упругий элемент, размещенный между приводом и выходным звеном (выходным валом) шарнира, выступает в качестве буфера для гашения энергии удара, предоставляя двигателю шарнира время для соответствующей реакции. Дальнейшим развитием идеи упругого шарнира является управление жесткостью упругого элемента. Это позволяет расширить диапазон возможных применений шарнира, оптимизировать его характеристики к конкретной задаче и совместить в одном изделии преимущества жестких систем (высокая кинематическая точность и грузоподъемность) и упругих шарниров (стойкость к ударам и высокая точность по усилию).
Целью настоящего изобретения является создание устройства, обеспечивающего регулировку жесткости выходного звена робототехнического шарнира (или приводного устройства, используемого в средствах роботизации/автоматизации), предохранение элементов привода от чрезмерных нагрузок и повышение надежности шарнира/приводного устройства за счет одновременно относительной простоты конструкции устройства регулировки жесткости и выполнения им предохранительной функции.
В робототехнических системах наиболее распространены конструкции шарниров с изменяемой жесткостью, использующие механические пружины, чей профиль деформации управляется кулачковыми (DE 102021000619 B3, KR 100912104 B1, US 20190126498 A1, CN 108890689 A) или различными многозвенными (CN 108608458 A) механизмами. Упругие шарниры с регулировкой жесткости механической пружины имеют относительно компактную конструкцию, обладают большей энергетической эффективностью по сравнению с упругими шарнирами с другими вариантами реализации переменной упругости (например, с упругими шарнирами с антагонистичными приводами), не требуют постоянного задействования двигателя настройки жесткости. Тем не менее, существенными недостатками упомянутых механических устройств регулировки жесткости, применяемых в таких упругих шарнирах, являются их достаточно сложная конструкция и невысокая защита от чрезмерных нерасчетных или ударных нагрузок, которые могут приводить к выходу из строя составных частей привода шарнира, в первую очередь, редуктора, или поломке самого механизма регулировки упругости.
Из предыдущего уровня техники известны магнитные предохранительные муфты, лишенные отмеченных выше недостатков (см., например, MINEX-H hysteresis coupling [Электронный ресурс] // KTR.COM: сайт компании KTR Systems GmbH. - URL: https://www.ktr.com/de/en/products/minex-h-hysteresis-couplings/). Магнитная муфта состоит из внешнего и внутреннего роторов, установленных соосно. Внешний ротор имеет высококачественные постоянные магниты на внутренней стороне, а внутренний ротор - на внешней. Один из роторов связан с приводом, второй - с выходным валом (выходным звеном) устройства, в котором данная магнитная муфта используется. Передача момента в магнитных муфтах осуществляется бесконтактным способом за счет сил магнитного взаимодействия между внутренним и внешним роторами. За счет бесконтактной передачи обеспечивается надежная защита деталей привода от перегрузок и ударных воздействий, так как при превышении внешней нагрузкой некоторого предельного значения крутящего момента внутренний и внешний роторы магнитной муфты проскальзывают друг относительно друга. При этом, если момент внешней нагрузки меньше предельно допустимого значения, то имеет место упругое отклонение ведомой части муфты относительно ведущей, пропорциональное величине приложенного внешнего момента и зависящее от значения коэффициента жесткости магнитной муфты, который, соответственно, определяет жесткость всего приводного устройства или робототехнического шарнира, в котором данная магнитная муфта используется. Также бесконтактный способ передачи вращения предоставляет возможность разделения/изоляции деталей внешнего и внутреннего ротора, путем помещения в зазор между их магнитными системами защитного кожуха из немагнитного материала, что обуславливает возможность применения приводных устройств или шарниров, использующих такие магнитные предохранительные муфты в задачах, где требуется надежное разделение сред, в которых работают ведущие и ведомые элементы приводного устройства/шарнира. Магнитные муфты с изоляцией друг от друга деталей, связанных с внутренним и внешним роторами, представлены, например, в документах ЕР 003977 и WO 2015172173. Недостатком вышеупомянутых магнитных муфт с точки зрения задач настоящего изобретения является отсутствие возможности регулировки величины предельного момента проскальзывания муфты, а также коэффициента жесткости муфты.
Известны устройства роликов для механизмов подачи листов в офисной технике, описанные в патентах JP 4587716 и US 5158279. В ролики встраиваются магнитные муфты с возможностью ручной настройки/регулировки предельного момента проскальзывания магнитной муфты. Устройства включают вал с установленными на нем по окружности постоянными магнитами, подвижный корпус с возможностью вращения относительно вала, магнитные элементы, установленные по окружности на внутренней поверхности подвижного корпуса. Настройка магнитной муфты осуществляется путем изменения относительного положения магнитов вала и подвижного корпуса в продольном направлении. Смещение производится за счет применения регулировочного винта (JP 4587716) или передачи винт-гайка (US 5158279). Недостатком известных устройств является возможность изменения только величины взаимного перекрытия магнитов муфты, что приводит к достаточно малому диапазону возможной регулировки предельного момента и коэффициента жесткости либо требует соответственного пропорционального увеличения габаритной длины устройства.
Наиболее близким к заявляемому изобретению по области применения и совокупности существенных признаков является устройство регулировки жесткости, использованное в последовательном упругом приводе (series elastic actuator), описанном в патенте KR 101991954 B1. Данное устройство регулировки жесткости, выбранное в качестве прототипа заявляемого изобретения, характеризуется следующими общими с ним признаками:
- внешний корпус;
- внутренний ротор, который установлен с возможностью вращения вокруг собственной оси и перемещения вдоль этой оси и выполнен с возможностью подсоединения к источнику движения для передачи вращения на внутренний ротор;
- множество внутренних магнитов, расположенных на внешней окружности внутреннего ротора;
- внешний ротор, установленный во внешнем корпусе с возможностью вращения вокруг той же оси, что и внутренний ротор;
- множество внешних магнитов, расположенных на внутренней окружности внешнего ротора и имеющих в осевом направлении область перекрытия с внутренними магнитами;
- при этом область перекрытия внешних и внутренних магнитов регулируется в соответствии с движением внутреннего ротора вдоль его оси.
Недостатки устройства регулировки жесткости, используемого в прототипе, такие же, как и в ранее упомянутых магнитных муфтах с регулировкой момента проскальзывания: недостаточно большой диапазон регулирования предельного момента и коэффициента жесткости магнитной муфты при малых продольных размерах устройства (либо необходимость увеличения габаритной длины устройства для расширения этого диапазона), а также отсутствие в такой конструкции возможности герметизации/изоляции вращающихся деталей, связанных с приводом и деталей, связанных с выходным валом.
Раскрытие сущности изобретения
Задачей изобретения является расширение диапазона регулирования величины предельного момента проскальзывания и коэффициента жесткости магнитной муфты при заданной (неизменной) габаритной длине магнитов с целью применения магнитной муфты в качестве устройства регулирования жесткости в составе приводных устройств или шарниров в робототехнических системах.
Еще одной задачей изобретения является обеспечение разделения (изоляция) сред, в которых функционируют ведущие и ведомые элементы магнитной муфты с целью возможности применения приводных устройств/шарниров, использующих такую магнитную муфту, для выполнения работ, требующих надежного разделения сред, что будет пояснено ниже.
Для решения поставленных задач предлагается магнитная муфта, которая по сравнению с прототипом содержит следующие отличительные признаки:
- для перемещения внутреннего ротора используется шток, установленный во внутреннем роторе с возможностью перемещения его вдоль общей оси;
- внешняя поверхность внутреннего ротора, на которой установлены внутренние магниты, а также внутренняя поверхность внешнего ротора, на которой установлены внешние магниты, выполнены коническими таким образом, что при перемещении внутреннего ротора вдоль его оси обеспечивается изменение (регулировка) не только величины перекрытия внешних и внутренних магнитов, но и величины радиального зазора между ними;
- внешний корпус магнитной муфты функционально разделен на две части, одна из которых служит для установки внутреннего ротора вместе со штоком для его перемещения, вторая часть - для установки внешнего ротора, а между двумя этими частями внешнего корпуса установлен защитный кожух из немагнитного материала, в виде стакана с конической стенкой, располагающейся в зазоре между внутренними и внешними магнитами;
- в одном из вариантов реализации магнитная муфта дополнительно содержит датчик угла поворота внешнего ротора.
Техническим результатом заявляемого изобретения является расширение диапазона регулирования величины предельного момента проскальзывания и коэффициента жесткости магнитной муфты при заданной (неизменной) габаритной длине магнитов, а также расширение области применения изобретения и, соответственно, приводного устройства/шарнира, использующего его в своем составе.
Здесь и далее: под предельным моментом проскальзывания магнитной муфты понимается значение максимального крутящего момента, передаваемого от внутреннего ротора к внешнему ротору через взаимодействие соответственно внутренних и внешних магнитов, при превышении которого происходит неконтролируемый срыв и проскакивание полюсов магнитов (т.е. свободный проворот внешнего ротора относительно внутреннего); под коэффициентом жесткости магнитной муфты понимается отношение внешнего крутящего момента на ее выходном фланце к относительному углу закручивания внешнего и внутреннего роторов при номинальном функционировании магнитной муфты.
Заявляемый технический результат в части расширения диапазона регулирования величины предельного момента проскальзывания и коэффициента жесткости обеспечивается за счет исполнения поверхностей установки внутренних и внешних магнитов соответственно на внутреннем и внешнем роторах коническими, что можно подтвердить следующими соображениями.
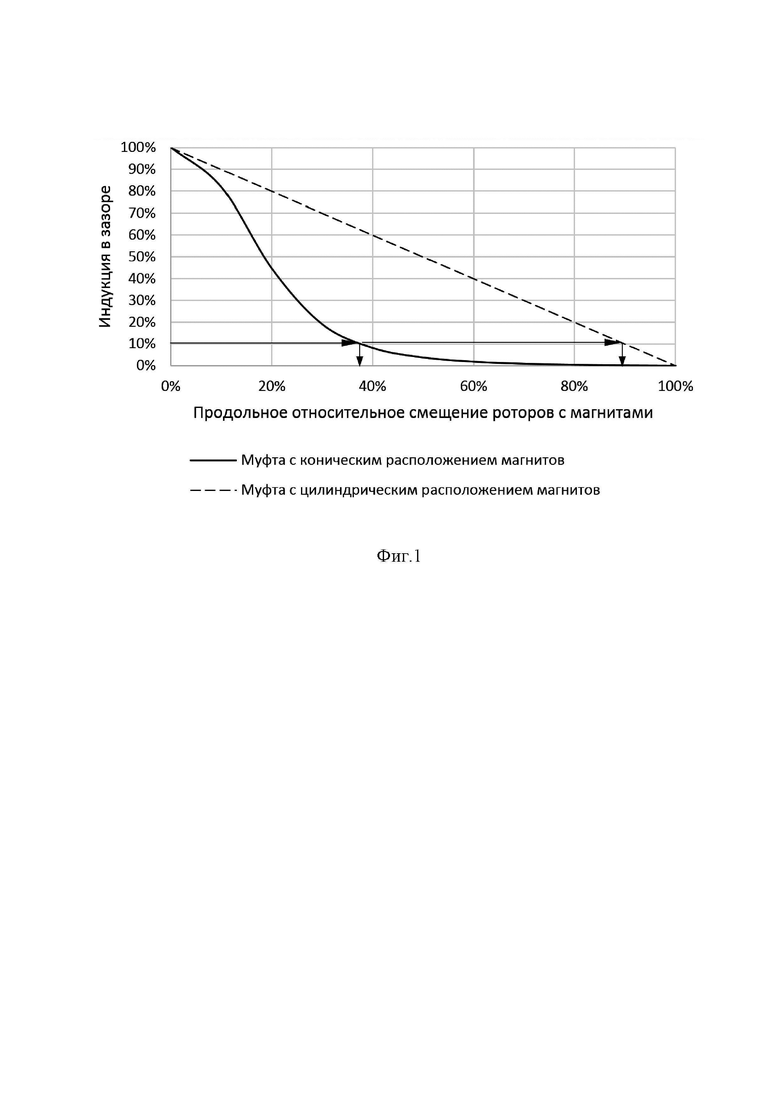
Сила взаимодействия двух противоположно стоящих магнитов внутреннего и внешнего роторов, и, соответственно, передаваемый ими момент, определяется индукцией В этих магнитов и их взаимодействием только в той части магнитной муфты, в которой магнитные линии замыкаются по кратчайшим путям, то есть в месте перекрытия магнитных линий магнитов внутреннего и внешнего роторов. Считая магнитное поле в зазоре между внутренними и внешними магнитами однородным (не учитывая краевые эффекты), очевидно, что индукция магнитного поля В в этом зазоре для каждого из магнитов магнитной муфты с цилиндрическими роторами (далее по тексту также упоминаемой для краткости как «цилиндрическая муфта») будет пропорциональна длине перекрытия магнитных линий f внутренних и внешних магнитов или обратно пропорциональна величине относительного продольного смещения внутреннего и внешнего роторов.
В то же время, известно, что индукция поля в точке, расположенной на оси дискового магнита на расстоянии у от его центра выражается формулой [Постоянные магниты: Справочник / Под. ред. Ю.М. Пятина. - 2-е изд., перераб. и доп. - М.: Энергия, 1980. - 488 с.]

где μ0 - магнитная постоянная, Мм - намагниченность магнита,  - толщина магнита, d - диаметр магнита. Таким образом, зависимость индукции от воздушного зазора близка к обратной кубической, особенно в случае тонкого магнита, который и применяется в роторных магнитных муфтах. Общий характер такой зависимости от величины воздушного зазора сохраняется и для плоских магнитов других форм, например, прямоугольной формы, применяемых в описываемой магнитной муфте.
- толщина магнита, d - диаметр магнита. Таким образом, зависимость индукции от воздушного зазора близка к обратной кубической, особенно в случае тонкого магнита, который и применяется в роторных магнитных муфтах. Общий характер такой зависимости от величины воздушного зазора сохраняется и для плоских магнитов других форм, например, прямоугольной формы, применяемых в описываемой магнитной муфте.
При изменении относительного положения магнитов в магнитной муфте с конической формой поверхностей, на которых расположены магниты (далее по тексту также упоминаемой для краткости как «коническая муфта»), меняется одновременно и длина перекрытия магнитных линий f, и величина воздушного зазора h между внутренними и внешними магнитами, причем h=fsinα, где α - полуугол при вершине конуса. Таким образом, изменение индукции происходит за счет двух эффектов - изменения перекрытия и изменения зазора. В «цилиндрической муфте» второй эффект отсутствует.
В результате сравнение зависимостей магнитной индукции от длины перекрытия внутренних и внешних магнитов (или величины относительного продольного смещения внутреннего и внешнего роторов) для магнитных муфт с цилиндрическими и коническими поверхностями расположения магнитов приводит к картине, показанной на фиг. 1. Из графиков на фиг. 1 видно, что, с одной стороны, для регулировки магнитной индукции от нуля до максимального момента для обеих муфт требуется перемещение роторов на полную длину магнита (от 0% до 100%), с другой стороны, - если рассматривать регулировку магнитной индукции не до нуля, а до некоторого практически применимого значения, например, до 10% (т.е., регулировку в 10 раз), виден существенный выигрыш по габаритам для «конической муфты», т.к., как видно из фиг. 1, для достижения такого диапазона регулирования для муфты с коническими поверхностями установки магнитов требуется относительное смещение роторов от 0% до менее 40%, тогда как для муфты с цилиндрической установкой магнитов требуется смещение от 0% до 90%.
Предельный передаваемый магнитной муфтой момент (предельный момент проскальзывания) определяется взаимодействием двух противоположно стоящих магнитов внутреннего и внешнего роторов и, таким образом, пропорционален второй степени магнитной индукции, что означает, что сделанные выше выводы относительно преимуществ «конической муфты» по сравнению с «цилиндрической» также справедливы и касательно регулирования предельного момента проскальзывания магнитной муфты (при этом принятый выше десятикратный диапазон регулирования магнитной индукции будет соответствовать стократному диапазону регулирования предельного момента проскальзывания магнитной муфты). Коэффициент жесткости магнитной муфты является первой производной от передаваемого магнитной муфтой момента по углу относительного скручивания внешнего и внутреннего роторов, который численно пропорционален величине относительного поперечного смещения внешних и внутренних магнитов. Таким образом, коэффициент жесткости магнитной муфты пропорционален удвоенному значению магнитной индукции, что означает, что сделанные выше выводы относительно преимуществ «конической муфты» по сравнению с «цилиндрической» также справедливы и касательно регулирования коэффициента жесткости магнитной муфты (при этом принятый выше десятикратный диапазон регулирования магнитной индукции будет соответствовать двадцатикратному диапазону регулирования коэффициента жесткости магнитной муфты).
Заявляемый технический результат в части расширения области применения приводного устройства, использующего предлагаемую магнитную муфту достигается за счет установки защитного кожуха из немагнитного материала, в виде стакана с конической стенкой, располагающейся в зазоре между внутренними и внешними магнитами, что позволяет применение такой магнитной муфты в составе приводных устройств в изделиях, предназначенных для выполнения работ, требующих гарантированного разделения рабочих сред, в которых функционируют ведущие и ведомые элементы приводных устройств, другими словами, задач, где одну среду (в которой осуществляется целевая функция приводного устройства или изделия в целом) необходимо оставить гарантировано чистой (не допускать смешения с другой средой), например, в пищевой промышленности, медико-биологических установках, атомной промышленности и др.
Также расширение области применения изобретения в одном из вариантов исполнения достигается за счет установки датчика угла поворота внешнего ротора магнитной муфты, что позволяет использовать предлагаемую магнитную муфту в составе шарниров робототехнических систем, например, в манипуляторах. Датчик угла поворота внешнего ротора магнитной муфты является для такого шарнира датчиком положения выходного звена шарнира, позволяя по сравнению сигналов с этого датчика и датчика положения входного вала (как правило, устанавливается на валу двигателя шарнира) судить о величине действующего на выходном звене внешнего момента. Введение в контур управления шарниром значения текущего выходного момента позволяет осуществлять активное (т.е., непосредственно в ходе функционирования шарнира при изменении внешнего воздействия на него) регулирование жесткости шарнира в зависимости от характера и целей задач, выполняемых шарниром (и/или манипулятором в целом). При применении изобретения в составе приводного устройства, работающего как правило на постоянную нагрузку (в частности, при редком и известном заранее изменении величины внешней нагрузки), наличие датчика угла поворота внешнего ротора магнитной муфты необязательно, так как активное ее регулирование в этом случае не предполагается, а перенастройка магнитной муфты под новый режим работы может быть осуществлена в соответствии с заранее известным графиком зависимости предельного момента проскальзывания от продольного (осевого) положения внутреннего ротора.
Краткое описание чертежей
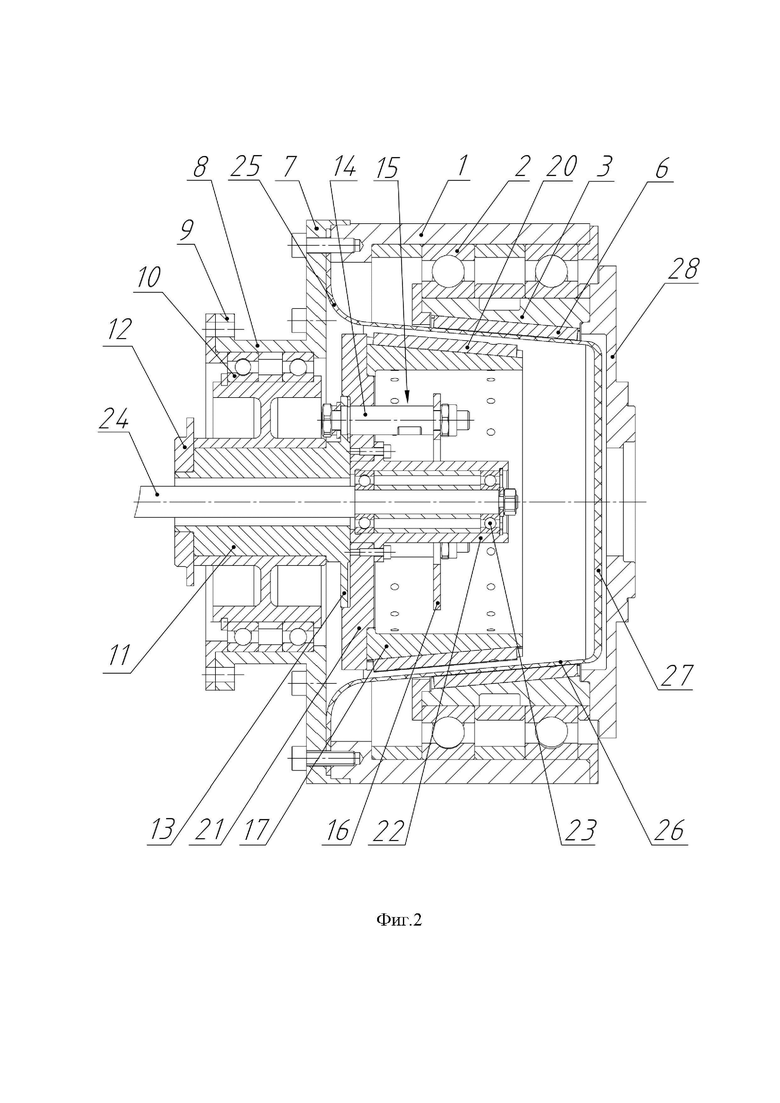
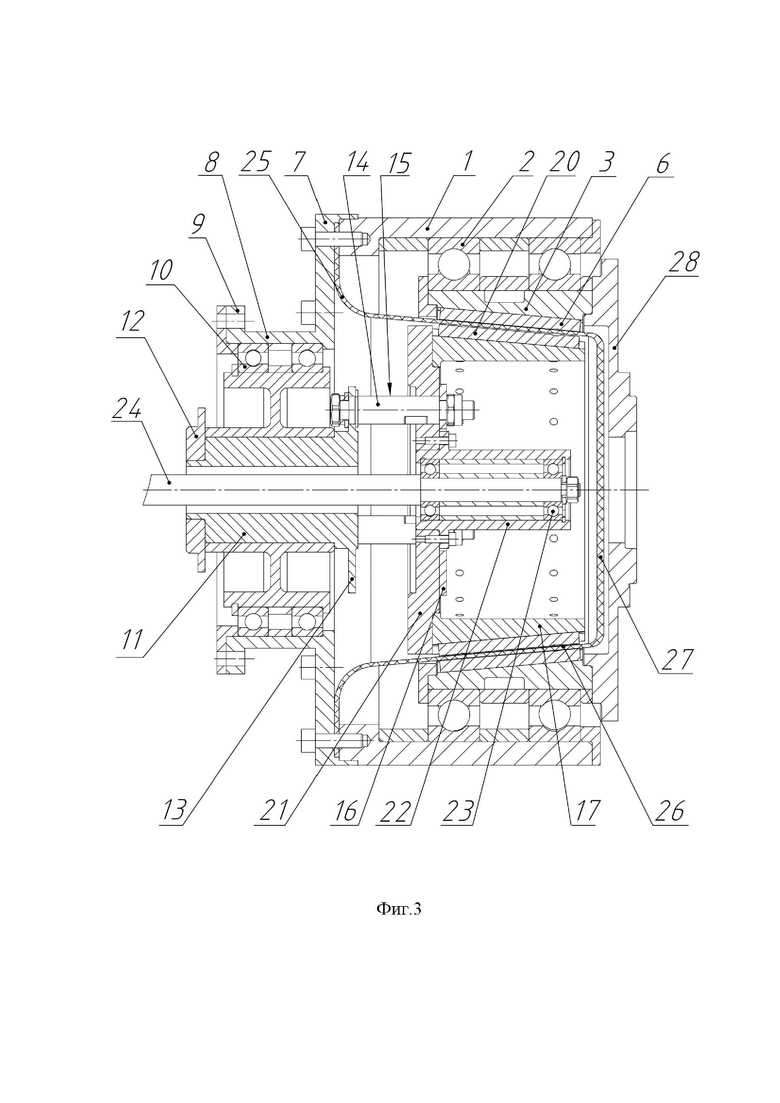
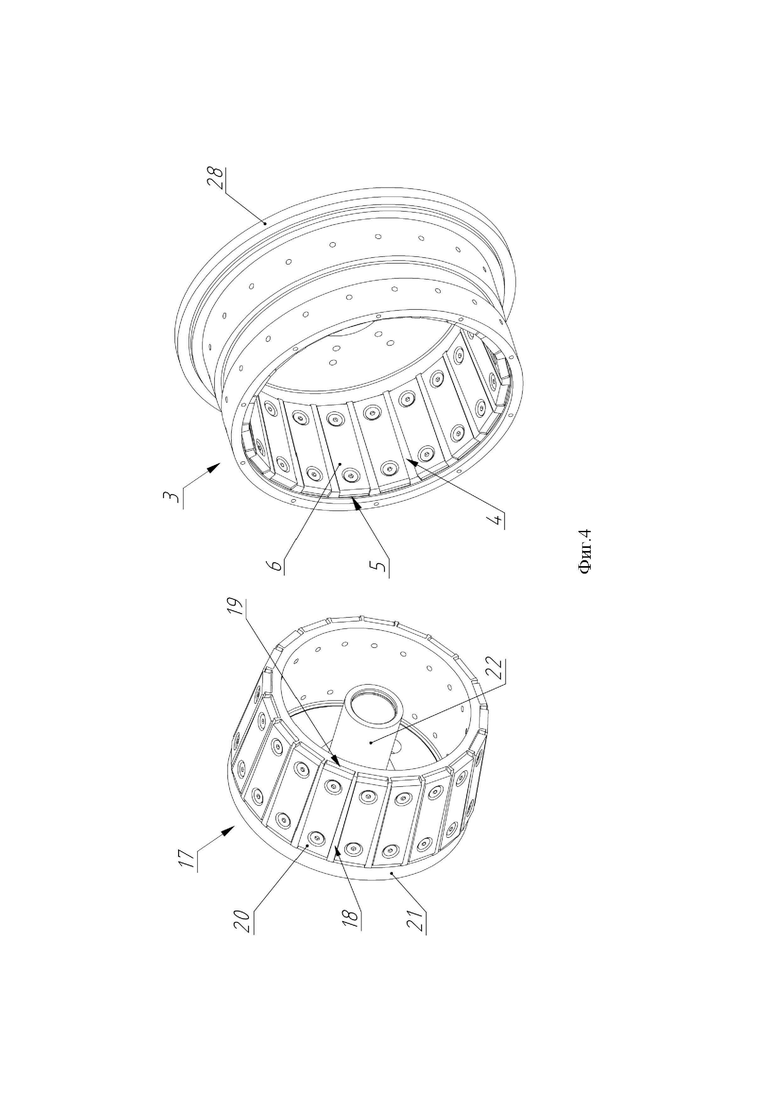
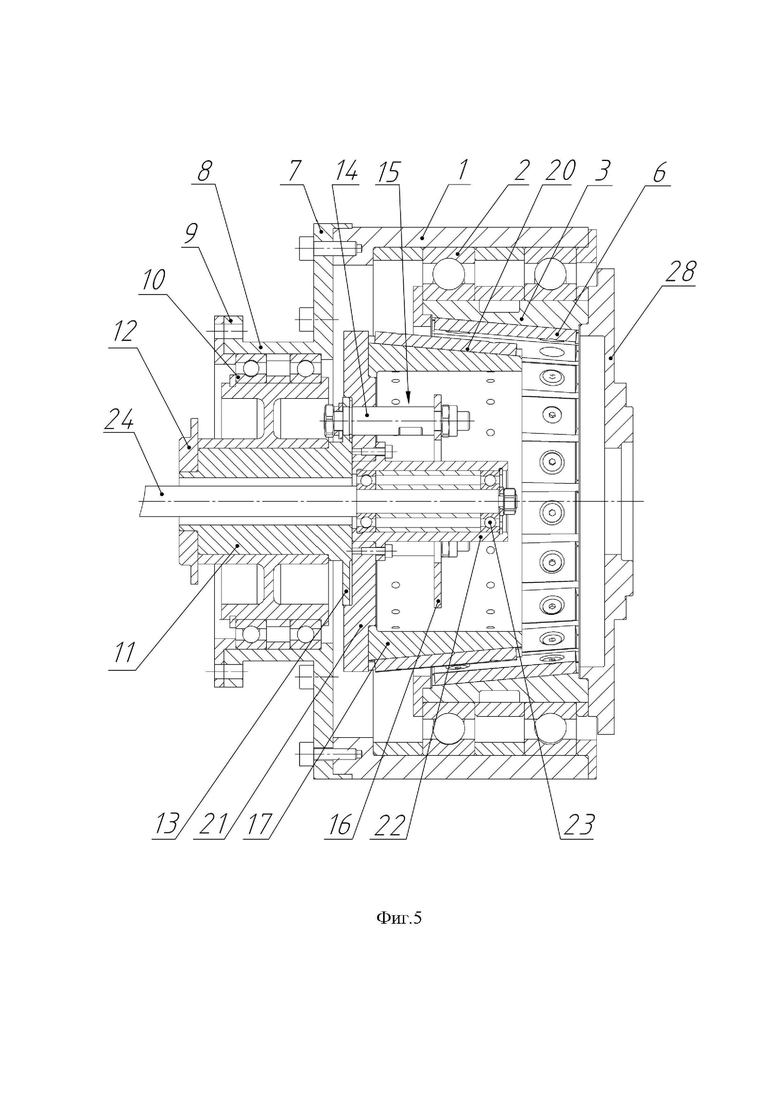
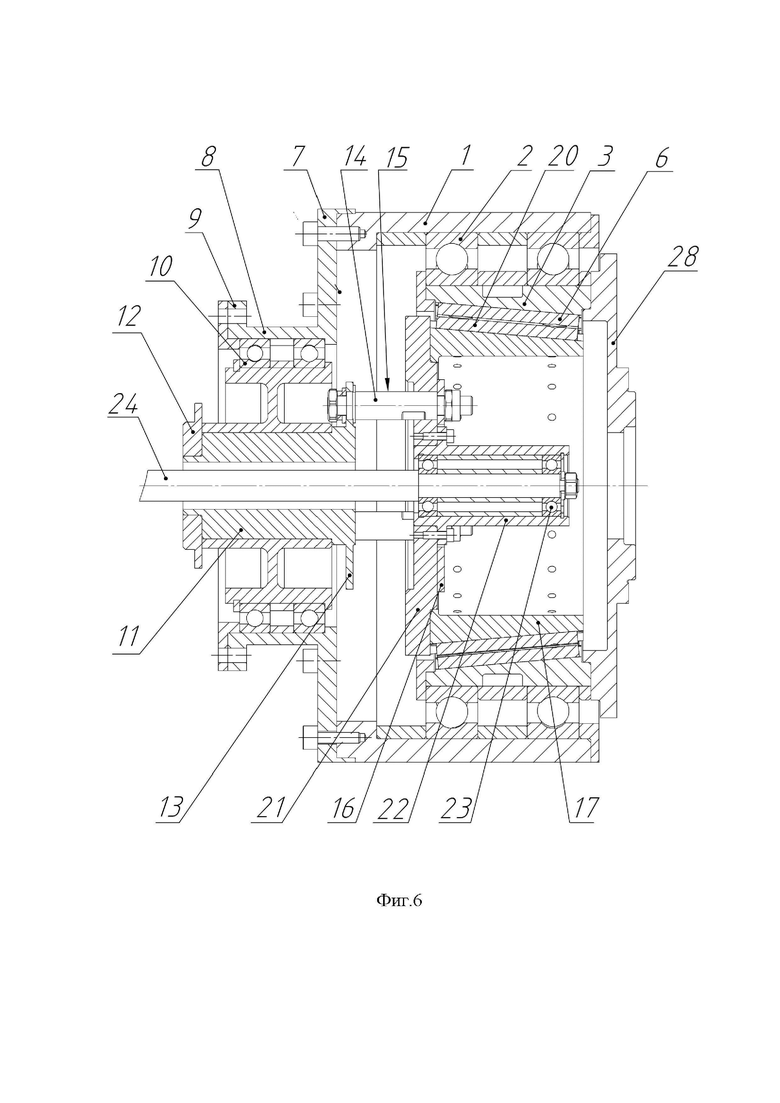
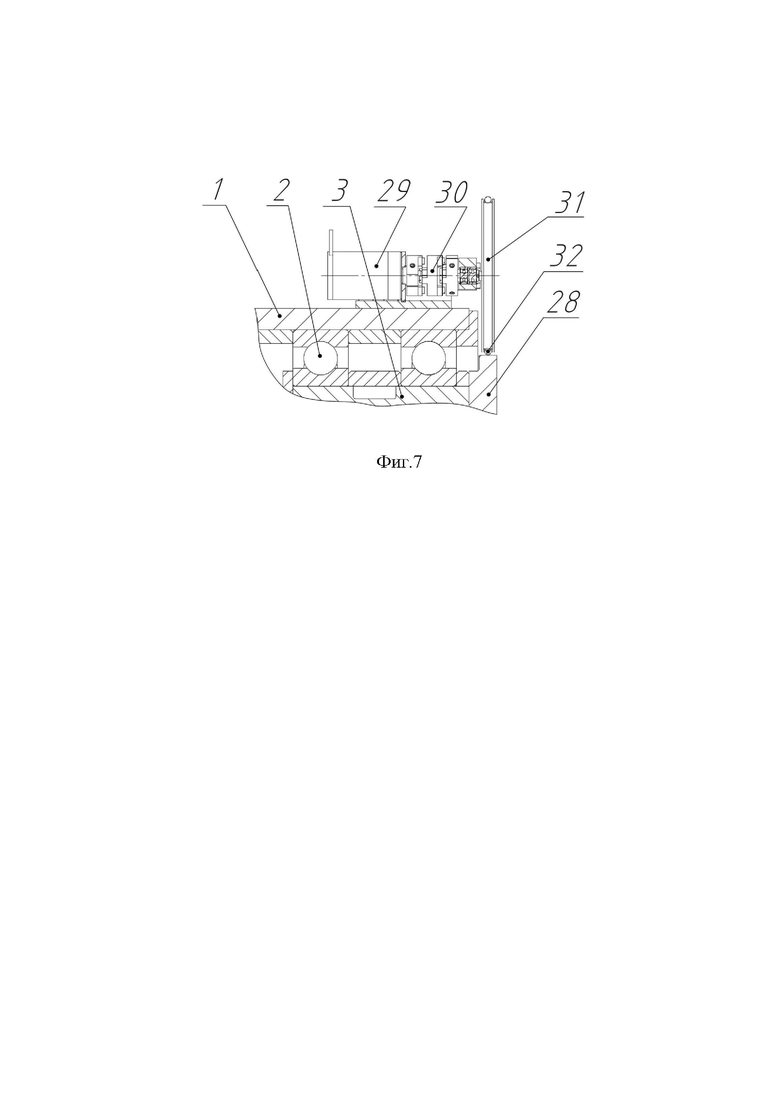
Сущность изобретения поясняется следующими рисунками и чертежами. На фиг. 1 показано сравнение графиков зависимости магнитной индукции в зазоре от одного магнита для магнитных муфт с цилиндрическими и коническими поверхностями расположения магнитов на внутреннем и внешнем роторах от относительного продольного смещения внутреннего и внешнего роторов. На фиг. 2 показан продольный разрез магнитной муфты в предпочтительном (общем) варианте исполнения при продольном положении внутреннего ротора, соответствующем минимальному значению предельного момента проскальзывания и коэффициента жесткости магнитной муфты. На фиг. 3 показан продольный разрез магнитной муфты в варианте исполнения по фиг. 2 при продольном положении внутреннего ротора, соответствующем максимальному значению предельного момента проскальзывания и коэффициента жесткости магнитной муфты. На фиг. 4 показаны общий внешний вид внутреннего и внешнего роторов и размещение на них магнитов. На фиг. 5 показан продольный разрез магнитной муфты в частном случае исполнения (варианте) без защитного кожуха при продольном положении внутреннего ротора, соответствующем минимальному значению предельного момента проскальзывания и коэффициента жесткости магнитной муфты. На фиг. 6 показан продольный разрез магнитной муфты в варианте исполнения по фиг. 5 при продольном положении внутреннего ротора, соответствующем максимальному значению предельного момента проскальзывания и коэффициента жесткости магнитной муфты. На фиг. 7 показан продольный разрез места установки датчика угла поворота внешнего ротора в одном из вариантов исполнения магнитной муфты. Осуществление изобретения
В предпочтительном варианте исполнения (фиг. 2 и фиг. 3) магнитная муфта включает корпус 1, в котором на подшипниковых опорах 2 неподвижно в осевом направлении установлен внешний ротор 3. Внутренняя поверхность 4 внешнего ротора 3 (фиг. 4) выполнена конической и имеет пазы 5, в которых установлены внешние магниты 6 прямоугольной формы. К корпусу 1 с одной из сторон прикреплена крышка 7, имеющая развитую опорную часть 8 и фланец 9, служащий для установки (крепления) магнитной муфты в составе целевого изделий (приводного устройства или робототехнического шарнира). В опорной части 8 крышки 7 через подшипниковые опоры 10 неподвижно в осевом направлении установлен ведущий вал 11, имеющий с одного конца фланец 12 для соединения вала 11 с источником движения и передачи на него крутящего момента, с другого конца - фланец 13, в котором закреплены пальцы 14. Пальцы 14 имеют направляющие цилиндрические поверхности 15, на которых установлен внутренний ротор 17, имеющий, таким образом, возможность линейного перемещения вдоль пальцев 15. На пальцах 14, со стороны противоположной их закреплению, установлен ограничитель хода 16. Внешняя поверхность 18 внутреннего ротора 17 (фиг. 4) выполнена конической и имеет пазы 19, в которых установлены внутренние магниты 20 прямоугольной формы. К внутреннему ротору 17 прикреплен фланец 21 с отверстиями под направляющие поверхности 15 и ступица 22, в которой через подшипниковые опоры 23 установлен шток 24. Шток 24 имеет возможность только осевого перемещения, вращение его вокруг оси заблокировано. Между крышкой 7 и корпусом 1 закреплен защитный кожух 25 из немагнитного материала (например, из полимера), имеющий вид тонкостенного стакана с конической стенкой 26 и плоским дном 27. На наружной торцевой части внешнего ротора 3 закреплен выходной фланец 28 магнитной муфты. В одном из вариантов исполнения (фиг. 5 и фиг. 6) магнитная муфта не содержит защитный кожух с сохранением всех остальных составных элементов. Еще в одном из вариантов исполнения (фиг. 7) магнитная муфта дополнительно содержит датчик 29 угла поворота внешнего ротора 3 магнитной муфты. Конструкция (принцип работы) и способ установки датчика могут быть различными. В примере реализации, показанном на фиг. 7, в качестве датчика применяется миниатюрный угловой оптоэлектронный абсолютный энкодер типа ЛИР (см. Абсолютные преобразователи угловых перемещений (угловые абсолютные энкодеры [Электронный ресурс] // SKBIS.RU: сайт компании ОАО «СКВ ИС». - URL: https://skbis.ru/catalog/rotary/absolute-rotary-encoders). Корпус датчика 29 установлен на корпусе 1 магнитной муфты, а валик чувствительного элемента датчика через компенсационную муфту 30 связан с диском 31, находящемся благодаря резиновому кольцу 32 во фрикционном взаимодействии с наружной поверхностью выходного фланца 28, установленного на внешнем роторе 3 магнитной муфты.
Устройство работает и применяется следующим образом.
Магнитная муфта используется в составе приводных устройств или шарниров робототехнических систем (целевые изделия).
Во всех вариантах исполнения магнитная муфта функционально делится на четыре части: внешний корпус (условно неподвижные детали, связанные с корпусом 1), входное звено (детали, связанные с внутренним ротором 17, вращение которых задается источником движения через фланец 12), выходное звено (детали, связанные с внешним ротором 3, вращающиеся с ним за одно целое) и регулировочное звено (шток 24, осуществляющий изменение осевого положения внутреннего ротора 17 относительно деталей ведущего звена, неподвижных в осевом направлении).
Установка магнитной муфты в целевом изделии производится через фланец 9 крышки 7 корпуса 1.
Вращение деталей входного звена осуществляется за счет привода, входящего в состав приводного устройства или шарнира, такого, например, как вентильный электродвигатель постоянного тока. Привод может состоять только из одного электродвигателя или дополнительно включать редуктор для понижения скорости вращения. Также в составе привода как правило используется датчик углового положения вала электродвигателя, который, в частности, в случае применения вентильного электродвигателя служит для целей управления вектором фазного напряжения на его обмотках.
Передача вращения и крутящего момента на выходное звено магнитной муфты происходит за счет сил магнитного взаимодействия между внутренними магнитами 20 и внешними магнитами 6 внутреннего и внешнего роторов. При этом, как пояснялось выше, предельный момент проскальзывания магнитной муфты и характеристика ее жесткости регулируются путем изменения относительного осевого положения внутреннего ротора 17 и внешнего ротора 3. Это положение меняется за счет осевого движения штока 24. Привод осевого движения штока 24, входящий в состав приводного устройства или шарнира, может быть выполнен, например, на основе электродвигателя постоянного тока и передачи винт-гайка. В случае необходимости прохождения штока 24 сквозь вышеупомянутый привод вращения ведущего звена магнитной муфты он должен иметь полый вал.
Коническая форма поверхностей 18 и 4 соответственно внутреннего и внешнего роторов магнитной муфты приводит к тому, что осевое перемещение внутреннего ротора 17 из одного крайнего положения, в котором он показан на фиг. 2 и фиг. 5, по направлению ко второму крайнему положению, в котором он показан на фиг. 3 и фиг. 6, приводит к одновременному возрастанию величины взаимного перекрытия внешних и внутренних магнитов 6 и 20 и уменьшению величины воздушного зазора между внутренними и внешними магнитами, определяемого как кратчайшее расстояние между ними (измеряемое по нормали к плоскостям магнитов).
В предпочтительном (общем) варианте исполнения изобретения между подвижными частями входного и выходного звеньев магнитной муфты установлен защитный кожух 25 из немагнитного материала. Такое техническое решение расширяет область применения магнитной муфты, позволяя ее применение в тех областях, где требуется гарантированное недопущение смешивания среды, в которой функционирует выходное звено магнитной муфты (т.е., и выходное звено приводного устройства в целом, в составе которого используется магнитная муфта), со средой в которой находится входное звено магнитной муфты (и, соответственно, остальная часть приводного устройства в целом, в составе которого используется магнитная муфта).
В случае отсутствия упомянутого требования по гарантированному разделению сред предлагаемая магнитная муфта может применяться без защитного кожуха в частном случае исполнения (варианте) по фиг. 5. Данный вариант применим, например, для шарниров робототехнических манипуляторов. При этом обозначенный ранее технический эффект в виде расширения диапазона регулирования величины предельного момента проскальзывания и коэффициента жесткости магнитной муфты применим и для данного частного исполнения. Более того, выполнение магнитной муфты без защитного кожуха позволяет еще больше повысить максимальные значения предельного момента проскальзывания и коэффициента жесткости ввиду того, что отсутствие конической стенки 26 защитного кожуха между внутренними 20 и внешними 6 магнитами позволяет еще больше сократить величину минимального воздушного зазора между ними, как это можно видеть из сравнения фиг. 3 и фиг. 6.
В случае необходимости введения в контур управления приводным устройством/шарниром величины внешнего момента нагрузки магнитная муфта, выполненная по вариантам по фиг. 2 или по фиг. 5 может быть, как уже отмечалось выше, оснащена датчиком 29 для измерения угла поворота внешнего ротора, устанавливаемого на внешнем корпусе магнитной муфты (фиг. 7).
| название | год | авторы | номер документа |
|---|---|---|---|
| Двухпозиционная электромагнитная муфта | 2022 |
|
RU2817440C1 |
| ШАРНИР С РЕГУЛИРУЕМОЙ ЖЕСТКОСТЬЮ | 2023 |
|
RU2823265C1 |
| ЭЛЕКТРОПРИВОД | 2015 |
|
RU2596002C1 |
| Датчик крутильных колебаний | 2016 |
|
RU2615915C1 |
| РОТОРНАЯ ОБЪЁМНАЯ МАШИНА | 2018 |
|
RU2701306C1 |
| ГЕНЕРАТОР ЭЛЕКТРИЧЕСКОГО ТОКА, ПРИМЕНЯЕМЫЙ НА РЕЛЬСОВОМ ТРАНСПОРТЕ | 2009 |
|
RU2406629C1 |
| Двигательная установка подводного аппарата | 2017 |
|
RU2699178C2 |
| ГЕНЕРАТОР ЭЛЕКТРИЧЕСКОГО ТОКА, ПРИМЕНЯЕМЫЙ НА РЕЛЬСОВОМ ТРАНСПОРТЕ | 2009 |
|
RU2412841C1 |
| БЕСКОНТАКТНЫЙ ДАТЧИК СКОРОСТИ ВРАЩЕНИЯ И ПОЛОЖЕНИЯ РОТОРА | 2012 |
|
RU2488122C1 |
| ГЕНЕРАТОР ЭЛЕКТРИЧЕСКОГО ТОКА, ПРИМЕНЯЕМЫЙ НА РЕЛЬСОВОМ ТРАНСПОРТЕ | 2008 |
|
RU2377150C1 |
Группа изобретений относится к области машиностроения, а именно к муфтам для передачи момента. Магнитная муфта содержит внешний корпус, внешний ротор, установленный с возможностью вращения и осевого перемещения с возможностью подсоединения к источнику движения для передачи вращения. Внешний ротор установлен во внешнем корпусе. Имеются внутренние и внешние магниты, расположенные на роторах. Внутренний ротор перемещает шток. Внешняя поверхность внутреннего ротора с магнитами, а также внутренняя поверхность внешнего ротора с магнитами выполнены коническими. Внешний корпус магнитной муфты функционально разделен на две части, одна из которых служит для установки внутреннего ротора вместе со штоком для его перемещения, вторая часть - для установки внешнего ротора. Между частями установлен защитный кожух из немагнитного материала, располагающийся в зазоре между внутренними и внешними магнитами. На внешнем корпусе муфты может быть установлен датчик угла поворота внешнего ротора. Достигается расширение диапазона регулирования предельного момента проскальзывания при обеспечении разделения сред. 2 н. и 1 з.п. ф-лы, 7 ил. 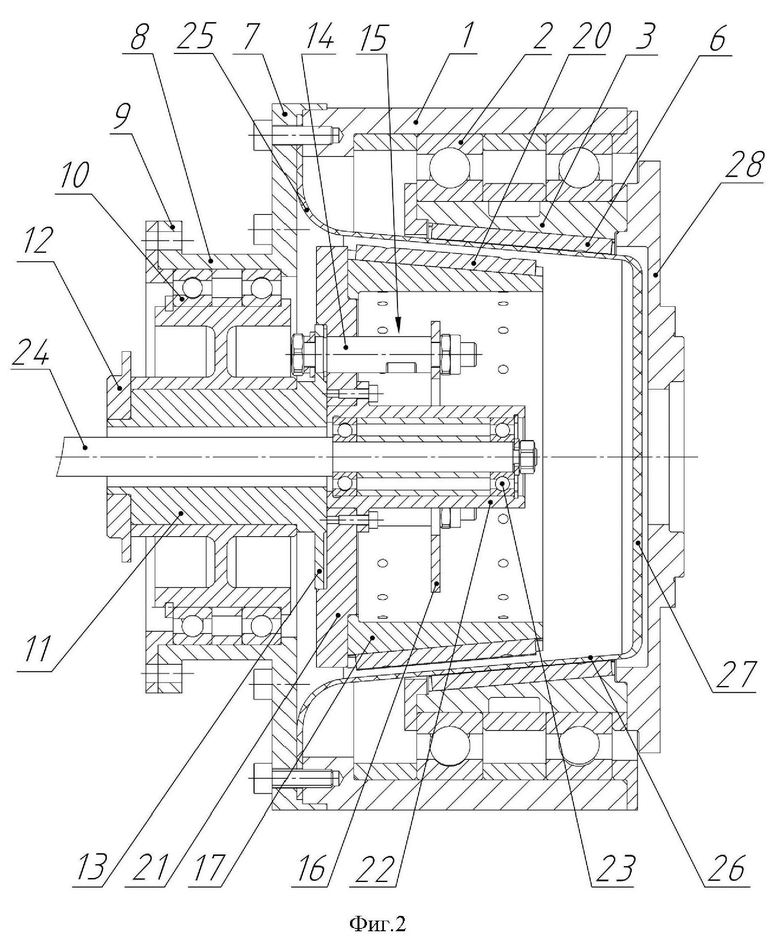
1. Магнитная муфта, содержащая внешний корпус, внутренний ротор, который установлен с возможностью вращения вокруг собственной оси и перемещения вдоль этой оси и выполнен с возможностью подсоединения к источнику движения для передачи вращения на внутренний ротор, множество внутренних магнитов, расположенных на внешней окружности внутреннего ротора, внешний ротор, установленный во внешнем корпусе с возможностью вращения вокруг той же оси, что и внутренний ротор, множество внешних магнитов, расположенных на внутренней окружности внешнего ротора и имеющих в осевом направлении область перекрытия с внутренними магнитами, при этом область перекрытия внешних и внутренних магнитов регулируется в соответствии с движением внутреннего ротора вдоль его оси, отличающаяся тем, что для перемещения внутреннего ротора используется шток, установленный во внутреннем роторе с возможностью перемещения его вдоль общей оси, внешняя поверхность внутреннего ротора, на которой установлены внутренние магниты, а также внутренняя поверхность внешнего ротора, на которой установлены внешние магниты, выполнены коническими таким образом, что при перемещении внутреннего ротора вдоль его оси обеспечивается изменение не только величины перекрытия внешних и внутренних магнитов, но и величины радиального зазора между ними, внешний корпус магнитной муфты функционально разделён на две части, одна из которых служит для установки внутреннего ротора вместе со штоком для его перемещения, вторая часть – для установки внешнего ротора, а между двумя этими частями внешнего корпуса установлен защитный кожух из немагнитного материала в виде стакана с конической стенкой, располагающейся в зазоре между внутренними и внешними магнитами.
2. Магнитная муфта, содержащая внешний корпус, внутренний ротор, который установлен с возможностью вращения вокруг собственной оси и перемещения вдоль этой оси и выполнен с возможностью подсоединения к источнику движения для передачи вращения на внутренний ротор, множество внутренних магнитов, расположенных на внешней окружности внутреннего ротора, внешний ротор, установленный во внешнем корпусе с возможностью вращения вокруг той же оси, что и внутренний ротор, множество внешних магнитов, расположенных на внутренней окружности внешнего ротора и имеющих в осевом направлении область перекрытия с внутренними магнитами, при этом область перекрытия внешних и внутренних магнитов регулируется в соответствии с движением внутреннего ротора вдоль его оси, отличающаяся тем, что для перемещения внутреннего ротора используется шток, установленный во внутреннем роторе с возможностью перемещения его вдоль общей оси, внешняя поверхность внутреннего ротора, на которой установлены внутренние магниты, а также внутренняя поверхность внешнего ротора, на которой установлены внешние магниты, выполнены коническими таким образом, что при перемещении внутреннего ротора вдоль его оси обеспечивается изменение не только величины перекрытия внешних и внутренних магнитов, но и величины радиального зазора между ними.
3. Магнитная муфта по пп. 1, 2, отличающаяся тем, что на внешнем корпусе магнитной муфты установлен датчик для измерения угла поворота внешнего ротора.
| СПОСОБ ИЗГОТОВЛЕНИЯ ЭЛЕКТРИЧЕСКИХ ТОНКОСЛОЙНЫХ НЕПРОВОЛОЧНЫХ СОПРОТИВЛЕНИЙ | 0 |
|
SU165811A1 |
| Управляемая муфта-тормоз | 1978 |
|
SU750670A2 |
| KR 101991954 B1, 24.06.2019 | |||
| МАГНИТНЫЙ ПРИВОД С ХОДОВЫМ ЯКОРЕМ В ВИДЕ ПОСТОЯННОГО МАГНИТА | 1990 |
|
RU2083013C1 |

