Изобретение относится к области робототехники, а именно к приводным шарнирам роботизированных манипуляторов различного назначения, в том числе, работающих в единой рабочей зоне с человеком или с объектами, требующими ограничения величины возможного силового воздействия на них.
Уровень техники
В настоящее время в робототехнике достаточно большое внимание уделяется развитию шарниров с привнесенной упругостью. Преимуществами таких упругих шарниров перед традиционными условно жесткими шарнирами являются возможность точного измерения момента шарнира, а также снижение требований к быстродействию контура управления при ударах, поскольку упругий элемент, размещенный между приводом и выходным звеном (выходным валом) шарнира, выступает в качестве буфера для гашения энергии удара, предоставляя двигателю шарнира время для соответствующей реакции. Дальнейшим развитием идеи упругого шарнира является управление жесткостью упругого элемента. Это позволяет расширить диапазон возможных применений шарнира, оптимизировать его характеристики к конкретной задаче и совместить в одном изделии преимущества жестких систем (высокая кинематическая точность и грузоподъемность) и упругих шарниров (стойкость к ударам и высокая точность по усилию). Отдельной областью применения шарниров с регулируемой жесткостью является медицинская техника, в частности экзоскелетоны (RU 2582629 C1).
Для мышц характерно наличие нелинейной жесткости, а для имитации их работы в экзоскелетонах также необходимо сочетание в одном шарнире двух приводов: ведущего и сдерживающего, то есть, в медицинских применениях желательно использование двухдвигательного (антагонистичного) шарнира. Применительно к робототехническим шарнирам подобное функциональное разделение приводов может быть условно сохранено, однако в реальных конструкциях с антагонистичными приводами оба привода выполняются равнозначными и могут использоваться как для разгона выходного звена, так и для его торможения, при этом работать как в одном направлении, так и в обратном.
Известен шарнир с регулируемой жесткостью по патенту KR 20160084244 A. Данный шарнир включает в себя: два приводных двигателя, закрепленных на подвижном основании, установленном с возможностью линейного перемещения относительно корпуса шарнира по линейным направляющим. На валах приводных двигателей установлены первые червяки, входящие в зацепление с общим червячным колесом механизма регулировки жесткости шарнира. Вращение с первых червяков передается на вторые червяки, расположенные над первыми червяками и на единых осях с соответствующими приводными двигателями и с первыми червяками. Вторые червяки входят в зацепление с общим червячным колесом основного привода, на валу которого установлено выходное звено шарнира. Между вторыми и первыми червяками установлены линейные упругие элементы в виде цилиндрических пружин сжатия. Работа шарнира возможна в двух режимах: основном и регулировочном, в зависимости от направлений вращения одного и второго приводных двигателей. При синхронном вращении приводных двигателей в противоположных направлениях (основной режим работы) они совместно обеспечивают передачу вращения на червячное колесо основного привода и выходное звено шарнира, а также холостое вращение червячного колеса механизма регулировки жесткости шарнира. Отклонение выходного звена шарнира под действием внешней силы приводит к осевому смещению вторых червяков, сжимающих один и разжимающих другой упругий элемент, так что величина углового отклонения выходного звена зависит от величины предварительного преднатяга этих упругих элементов. При вращении приводных двигателей в одном направлении (регулировочный режим работы) взаимодействие первых червяков с червячным колесом механизма регулировки жесткости приводит к возникновению на первых червяках осевых сил, под действием которых происходит линейное перемещение основания, на котором установлены приводные двигатели. Это, в свою очередь, приводит к изменению длины линейных упругих элементов (сжатию или удлинению) и соответствующему изменению жесткости механизма. Угловое положение выходного звена при этом не меняется. Таким образом, в данном известном шарнире два приводных двигателя одновременно участвуют как в управлении движением шарнира, таки в регулировке его жесткости.
Недостатком известного шарнира с регулируемой жесткостью является достаточно сложная конструкция, включающая две сдвоенные червячные передачи, работающие на выходную нагрузку, а также наличие большого числа деталей, подвижных в линейном направлении, что снижает общую эффективность такой конструкции, а также увеличивает осевой габарит шарнира.
Известен шарнир с двухсторонней антагонистичностью с переменной жесткостью (см., например, DLR Bidirectional Antagonism with Variable Stiffness (BAVS) [Электронный ресурс]. - URL: https://viactors.org/Documents/ VSA data sheets/Viactors VSA Data Sheet - BAVS.pdf). Данный шарнир включает два идентичных привода, каждый из которых состоит из электродвигателя и волнового редуктора, корпус которого (жесткое колесо волнового редуктора) установлен с возможностью вращения относительно корпуса шарнира. К корпусу волнового редуктора прикреплен кулачок, имеющий вогнутую профилированную поверхность, на которую опирается ролик механизма регулировки жесткости шарнира. Ролик с другой стороны опирается на корпус шарнира через цилиндрическую пружину большой жесткости (большой нагрузочной способности) и установлен с возможностью перемещения вдоль линейных направляющих. Таким образом, шарнир содержит два механизма регулировки жесткости, каждый из которых включает кулачок, ролик, пружину и линейные направляющие. На выходных валах приводов, связанных с гибкими колесами волновых редукторов, установлены конические зубчатые колеса, входящие в зацепление с общим коническим зубчатым колесом, установленным на выходном валу шарнира (передаточное отношение равно единице). Таким образом, приводная система шарнира образует с выходным валом Т-образную кинематическую схему. Аналогично описанному выше шарниру данный шарнир может работать в двух режимах: основном и регулировочном, в зависимости от направлений вращения одного и второго приводных двигателей. Регулировка жесткости происходит при вращении двигателей в противоположных направлениях. В этом случае выходной вал остается неподвижен и под действием реактивных моментов происходит поворот корпусов (жестких колес) волновых редукторов и соответствующих кулачков. Поворот кулачков приводит к перемещению роликов и сжатию или разжатию связанных с ними пружин, т.е. изменению величины действующей от них упругой силы, что приводит к изменению величины жесткости шарнира как меры углового отклонения выходного вала шарнира под действием заданной внешней нагрузки (крутящего момента). При вращении двигателей в одном направлении они совместно обеспечивают кинематически однозначное вращение общего конического зубчатого колеса, установленного на выходном валу шарнира (основной режим работы).
К недостаткам известного шарнира можно отнести следующее:
- расположение механизмов регулировки жесткости после выходных редукторов (в данном случае волновых), что приводит к действию значительных нагрузок на детали отдельного механизма, в частности на кулачок и ролик, а также требует применения высоконагруженной пружины;
- технологическую сложность шарнира, обусловленную применением достаточно сложных для изготовления высоконагруженных деталей, таких как кулачок, линейные направляющие;
- применение линейных направляющих и линейно перемещающихся деталей, что приводит к дополнительным механическим потерям;
- Т-образную компоновку шарнира, затрудняющую его применение в стандартных робототехнических шарнирах.
Наиболее близким к заявляемому изобретению аналогом (выбранным в качестве прототипа) является известный шарнир по патенту CN 108297127 А (A variable stiffness passive compliant joint based on elastic elements или «Пассивный податливый шарнир с переменной упругостью на основе упругих элементов»). Устройство данного шарнира во многом схоже с устройством шарнира BAVS, но имеет более традиционную «одноосевую» компоновку.
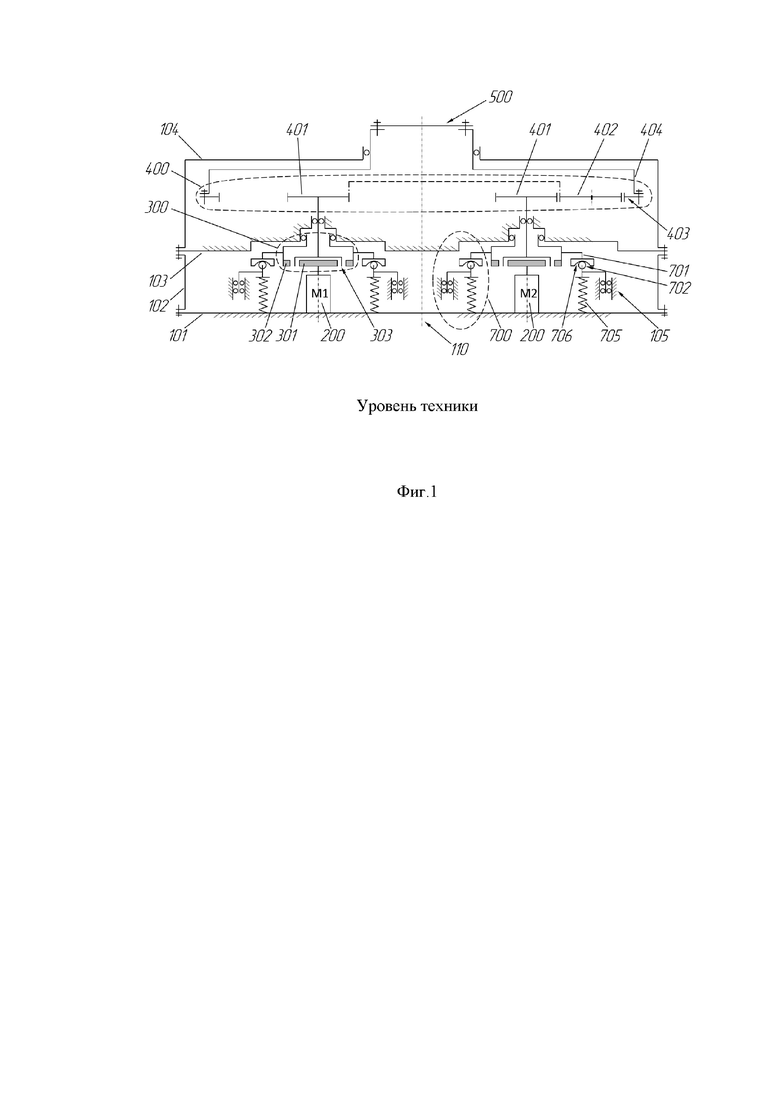
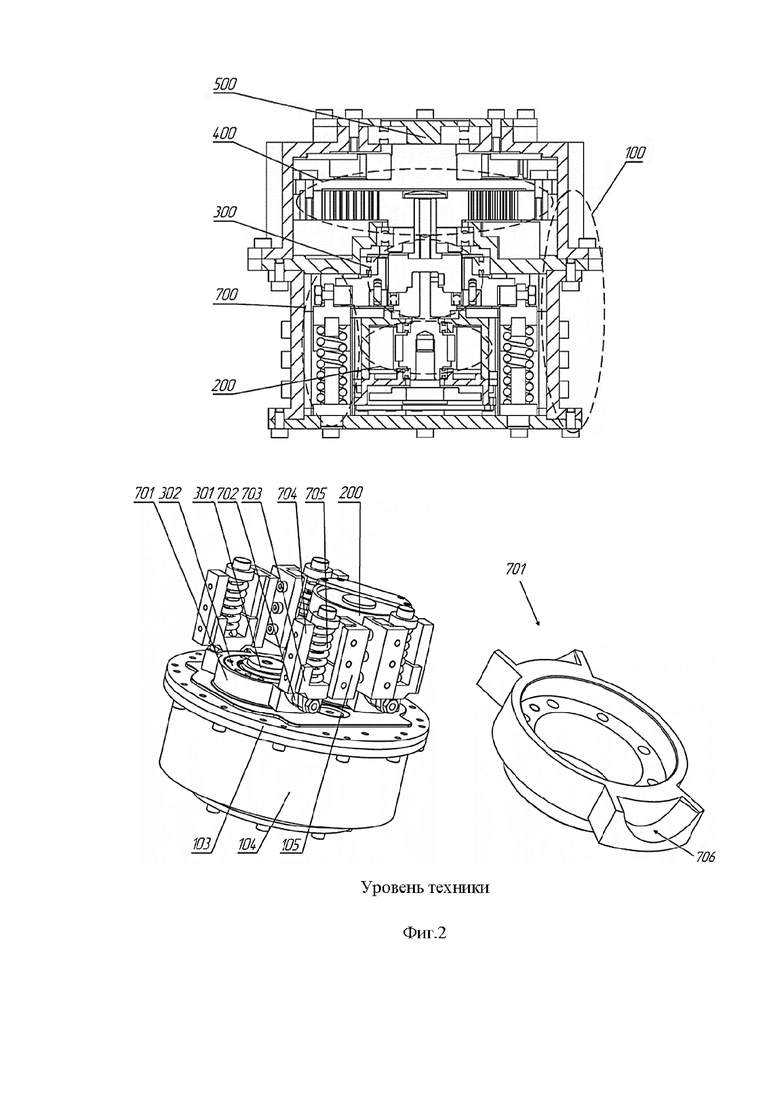
Устройство шарнира-прототипа поясняется на примере схемы, представленной на фиг. 1, а также разреза конструкции и трехмерных проекций, представленных на фиг. 2. Данный шарнир включает корпус 100, основными деталями которого являются корпусные детали 101,102,103 и 104, два идентичных привода, установленных в корпусе симметрично относительно главной оси 110 шарнира, каждый из приводов состоит из электродвигателя 200 и волнового редуктора 300, жесткое колесо 302 которого установлено с возможностью вращения относительно корпуса 100 шарнира, а генератор 301 волнового редуктора соединен с выходным валом электродвигателя 200. К жесткому колесу 302 прикреплен кулачковый диск 701, имеющий две вогнутые профилированные поверхности 706, на каждую из которых опирается ролик 702 кулачкового механизма 700 механизма регулировки жесткости шарнира. Ролик 702 с другой стороны опирается на корпус шарнира через цилиндрическую пружину 705 и установлен с возможностью перемещения вдоль линейных направляющих 105. На выходных валах приводов, связанных с гибкими колесами 303 волновых редукторов, установлены цилиндрические зубчатые колеса 401 механизма зубчатой передачи 400, которые через промежуточное (паразитное) зубчатое колесо 402 входят в зацепление с общим цилиндрическим зубчатым колесом 403 с внутренними зубьями. Таким образом, механизм зубчатой передачи 400 играет роль механизма, суммирующего потоки мощности двух приводов (роль основного выходного редуктора шарнира по-прежнему играют волновые редукторы 300 приводов). Зубчатое колесо 403 установлено в подвижном корпусе 404, на котором закреплен выходной фланец 500 шарнира и который установлен с возможностью вращения относительно корпуса 100 шарнира.
Таким образом, в прототипе по сравнению с шарниром BAVS каждый из двух механизмов регулировки жесткости шарнира (по одному на каждый привод) включает два кулачковых механизма 700 вместо одного, что позволяет снизить нагрузку на кулачковые диски 701 в два раза, но принципиально не устраняет недостатки, отмеченные выше для шарнира BAVS. Таким образом, отмеченные выше недостатки, за исключением Т-образной компоновки шарнира BAVS, справедливы и для шарнира-прототипа.
Общими существенными признаками заявляемого изобретения и ближайшего аналога (шарнира-прототипа) является то, что они содержат корпус, два приводных двигателя, два механизма регулировки жесткости шарнира, выходной фланец шарнира, а приводные двигатели симметрично закреплены на корпусе шарнира
Раскрытие сущности изобретения
Задачей изобретения является снижение нагрузки на элементах механизмов регулировки жесткости и снижение технологической сложности деталей шарнира, повышение эффективности шарнира.
Для решения поставленных задач предлагается шарнир с регулируемой жесткостью, который по сравнению с прототипом имеет следующие отличительные признаки:
- содержит один общий выходной редуктор;
- механизмы регулировки жесткости установлены между приводными двигателями и общим выходным редуктором;
- каждый из механизмов регулировки жесткости содержит входной и выходной валики, установленные с возможностью вращения друг относительно друга вокруг общей оси механизма, не менее одного эксцентрикового блока, установленного на выходном валике с возможностью вращения относительно оси, параллельной общей оси механизма, не менее одного троса, закрепленного с одной стороны на входном валике, а с другой стороны на эксцентриковом блоке, и не менее одного упругого элемента, установленного с возможностью передачи упругого крутящего момента от эксцентрикового блока на выходной валик.
Техническим результатом заявляемого изобретения является упрощение конструкции шарнира, снижение технологической сложности составляющих деталей, снижение механических потерь (повышение эффективности шарнира).
Достижение данного технического результата обеспечивается за счет расположения механизмов регулировки жесткости до общего выходного редуктора (в отличие от расположения механизмов регулировки жесткости после выходных редукторов у прототипа), что приводит к существенному снижению (пропорционально передаточному числу редуктора) нагрузки на элементах механизма регулировки жесткости. Это, в свою очередь позволяет использовать упругие элементы, рассчитанные на гораздо меньшие нагрузки, в частности, использовать, например, стандартные пружины кручения. Снижение нагрузки на механизмы регулировки жесткости и применение в качестве упругих элементов стандартных пружин кручения позволяет также отказаться от технологически сложных деталей, таких как кулачковые диски и линейные направляющие, что позволило существенно упростить конструкцию механизма регулировки жесткости, который включает достаточно простые детали и не содержит каких-либо поступательно двигающихся элементов. Применение вместо двух выходных редукторов одного общего выходного редуктора также упрощает конструкцию шарнира. Отсутствие линейно перемещающихся деталей и общее упрощение конструкции механизма регулировки жесткости обеспечивает снижение механических потерь при работе механизма.
Краткое описание чертежей
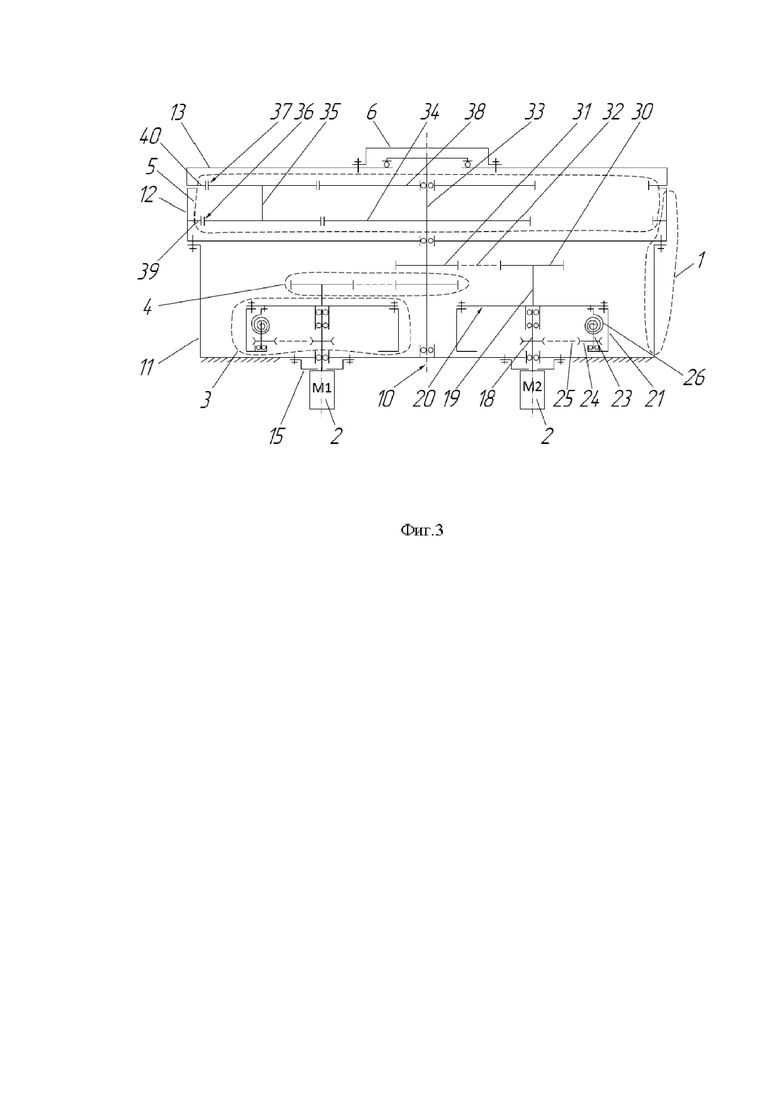
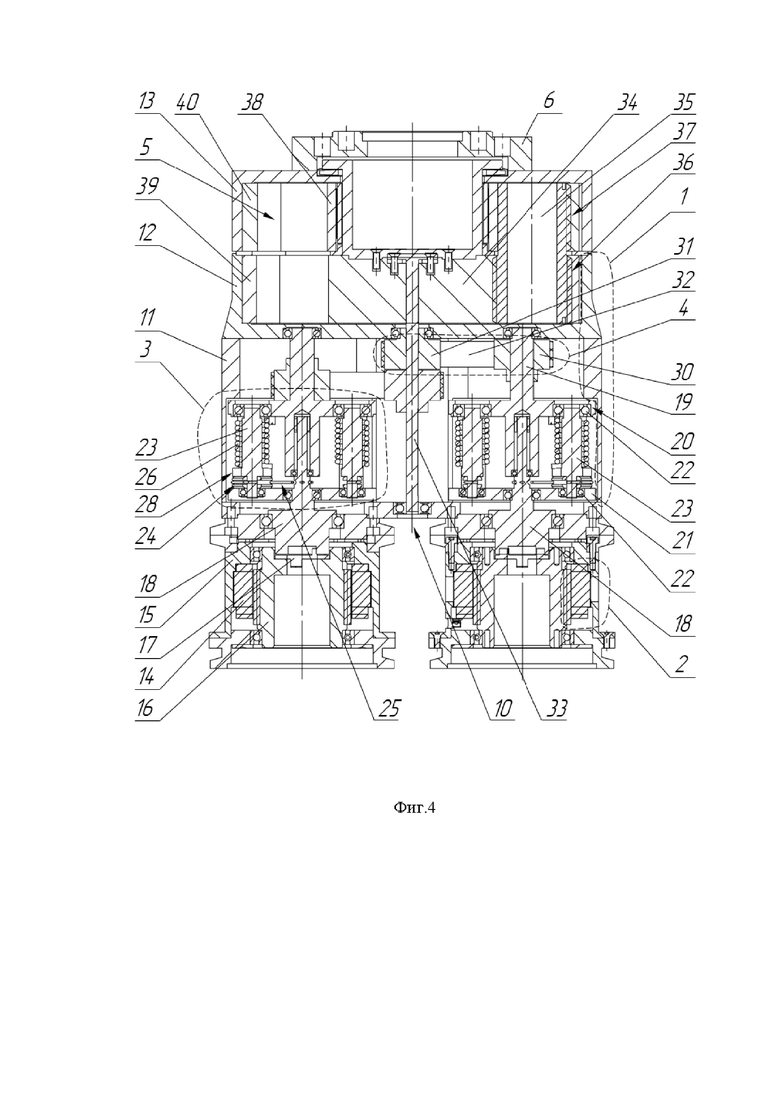
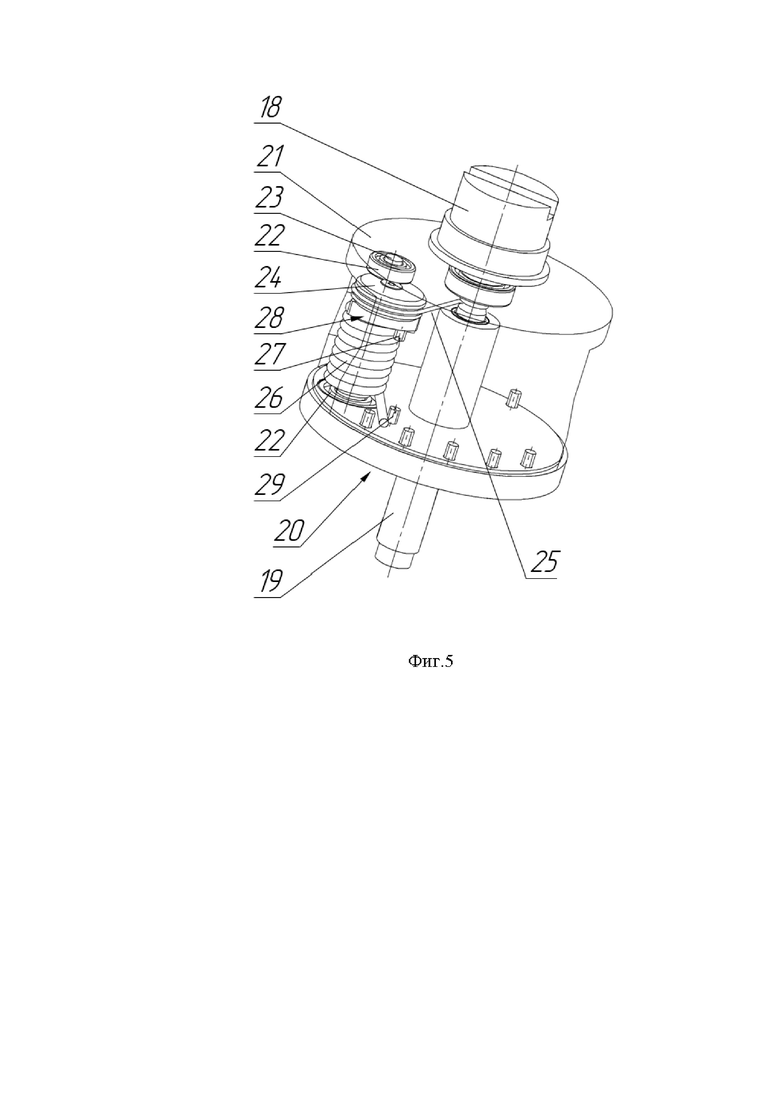
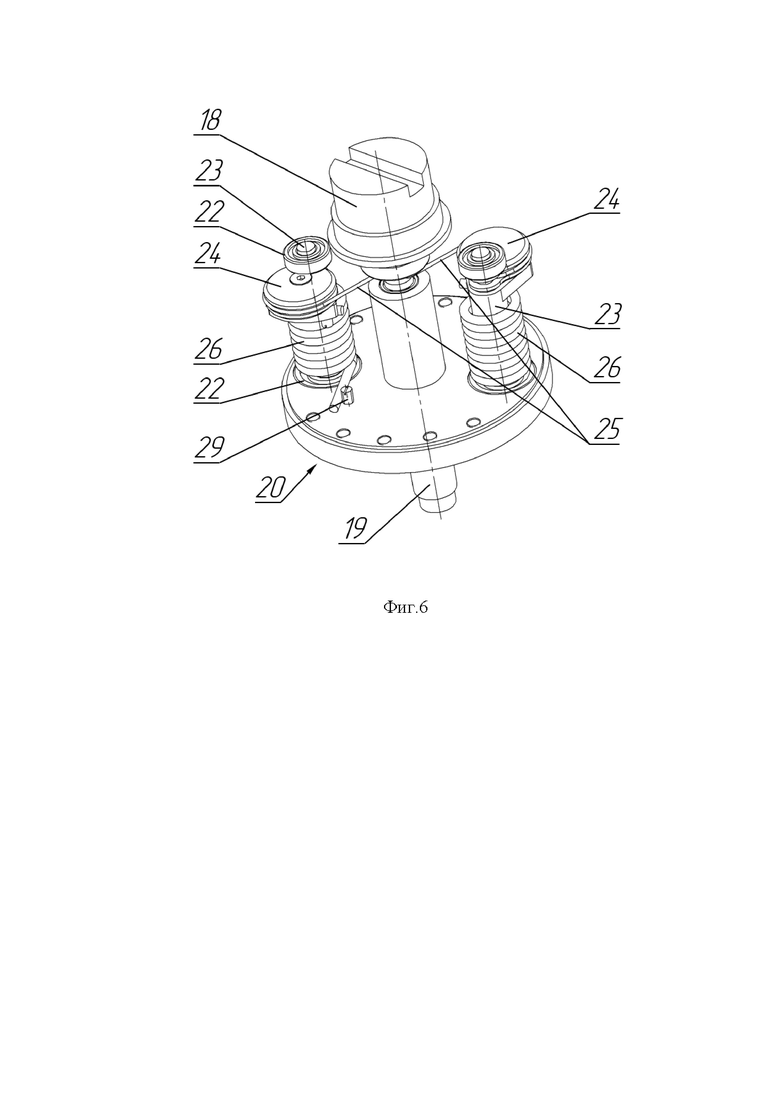
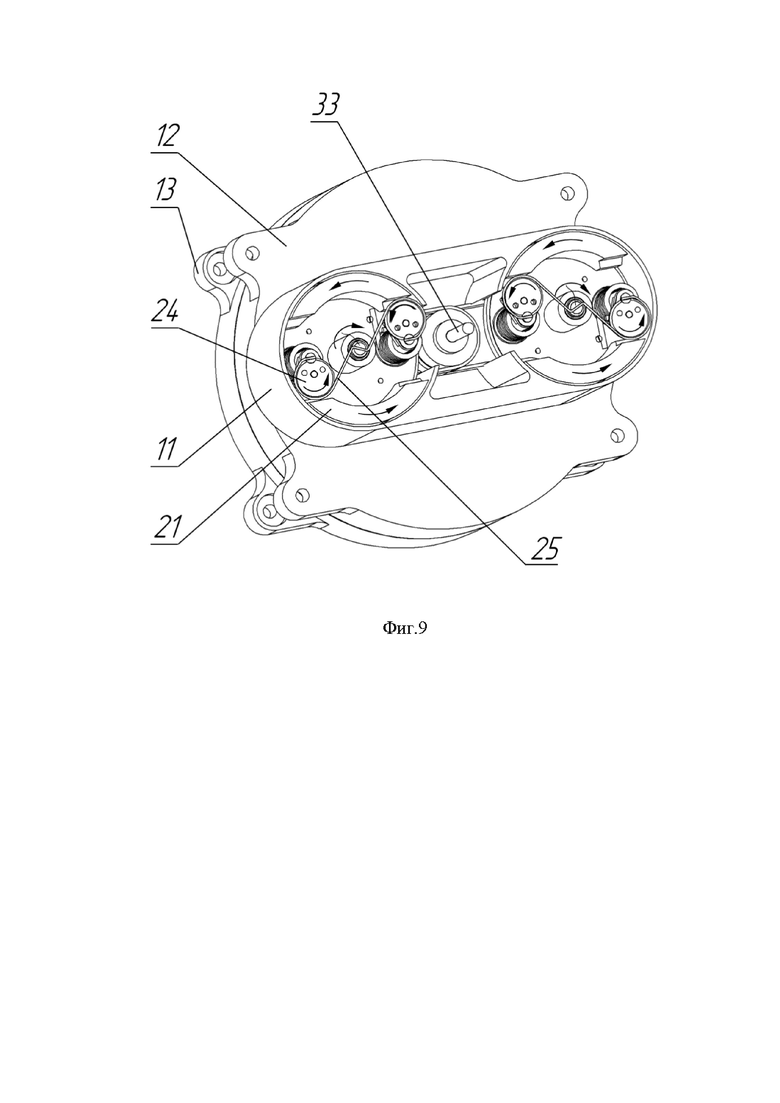
Сущность изобретения поясняется следующими рисунками и чертежами. На фиг. 1 показана схема, объясняющая устройство и принцип работы шарнира-прототипа (уровень техники). На фиг. 2 дополнительно к фиг. 1 показаны разрез конструкции и трехмерные проекции устройства шарнира-прототипа (уровень техники). На фиг. 3 представлена схема, поясняющая устройство и принцип работы заявляемого изобретения. На фиг. 4 показан основной продольный разрез предлагаемого шарнира с регулируемой жесткостью, выполненный вдоль главной оси шарнира и вдоль осей приводных двигателей. На фиг. 5 показано устройство одного механизма регулировки жесткости шарнира в варианте исполнения с одним упругим элементом. На фиг. 6 показано устройство одного механизма регулировки жесткости шарнира в варианте исполнения с двумя упругими элементами. На фиг. 7 показано устройство механизма передачи вращения от выходных валиков механизмов регулировки жесткости на ведущий вал общего выходного редуктора. На фиг. 8 показана схема совместной работы двух приводных двигателей и механизмов регулировки жесткости в регулировочном режиме работы шарнира (режиме изменения жесткости шарнира). На фиг. 9 показана схема совместной работы двух приводных двигателей и механизмов регулировки жесткости в основном (приводном) режиме работы шарнира.
Осуществление изобретения
Шарнир с регулируемой жесткостью включает корпус 1, два приводных двигателя 2, два механизма регулировки жесткости 3, две ременные передачи 4, общий выходной редуктор 5 и выходной фланец 6. Приводные двигатели 2 установлены на корпусе 1 симметрично относительно главной оси 10 шарнира. Корпус 1 шарнира конструктивно разделен на основной корпус 11 и корпус 12 выходного редуктора, а выходной фланец 6 установлен на подвижном корпусе 13 выходного редуктора 5.
Каждый приводной двигатель 2 состоит из статора 14, закрепленного в корпусе 15 двигателя и ротора 16, установленного с возможностью вращения относительно корпуса 15. Корпусы 15 закреплены на основном корпусе 11 шарнира. Ротор 16 приводного двигателя 2 через элемент 17 муфты Ольдгейма соединен с входным валиком 18 механизма регулировки жесткости 3.
Устройство механизма регулировки жесткости 3 в варианте исполнения с одним упругим элементом поясняется на фиг. 5. Механизм состоит из входного валика 18 и выходного валика 19, установленных с возможностью вращения друг относительно друга вокруг общей оси механизма. Выходной валик 19 снабжен диском 20, на котором закреплен подвижный корпус 21. На диске 20 выходного валика 19 и корпусе 21 в подшипниках 22 установлена ось 23 с эксцентриковым блоком 24. Между входным валиком 18 и эксцентриковым блоком 24 протянут трос 25 таким образом, что один его конец закреплен на входном валике 18, а другой конец проходит вокруг эксцентрикового блока 24 и закрепляется на оси 23. На оси 23 установлена пружина кручения 26, выполняющая роль упругого элемента механизма регулировки жесткости 3. Для этого один конец пружины упирается в стопорный винт 27, установленный на выступающей части 28 оси 23, на котором закреплен и эксцентриковый блок 24, а второй конец пружины опирается на стопорный винт 29, установленный на диске 20 выходного валика 19. Таким образом вращение от эксцентрикового блока 24 на выходной валик 19 передается через упругий элемент, - пружину кручения 26.
С целью уменьшения нагрузки на упругий элемент и другие детали механизма регулировки жесткости 3 или, наоборот, увеличения его общей нагрузочной способности, механизм регулировки жесткости 3 в различных вариантах исполнения может содержать более одного упругого элемента и, соответственно, более одной оси 23 и эксцентрикового блока 24. Для иллюстрации такого варианта конструкции на фиг. 6 показано устройство механизма регулировки жесткости 3 (деталь поз. 21 на фиг. 6 условно не показана), содержащего две оси 23, два эксцентриковых блока 24 и две пружины кручения 26, установленные симметрично относительно общей оси механизма. При этом трос 25 может быть общим для обоих эксцентриковых блоков 24, проходя насквозь через отверстие во входном валике 18. Предлагаемая конструкция механизма регулировки жесткости 3 позволяет также разместить и большее количество упругих элементов (более двух), давая возможность тем самым боле гибко регулировать как общую нагрузочную способность механизма, так и общую характеристику жесткости шарнира в зависимости от угла относительного закручивания двух механизмов регулировки жесткости 3.
Как видно из представленного описания, отличительными особенностями предлагаемого механизма регулировки жесткости являются как относительная простота конструкции, так и полное отсутствие каких-либо поступательно перемещающихся деталей, что является его несомненным преимуществом.
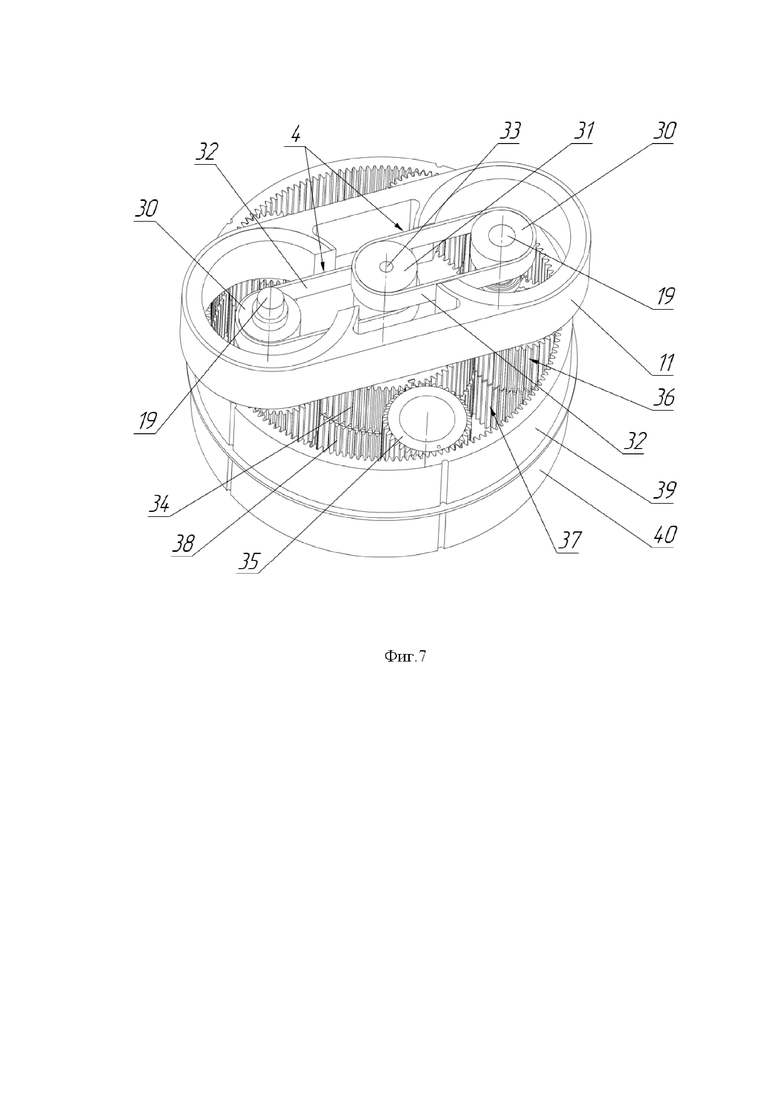
Выходные валики 19 механизмов регулировки жесткости 3 соединены с общим выходным редуктором 5 посредством механической передачи. Тип применяемой для этого механической передачи не принципиален с точки зрения сути изобретения. В описываемом варианте осуществления в качестве механической передачи используются ременные зубчатые передачи 4 (фиг. 7), состоящие из ведущих шкивов 30, установленных на выходных валиках 19, ведомых шкивов 31 и зубчатых ремней 32. Ведомые шкивы 31 установлены на общем ведущем валу 33 общего выходного редуктора 5.
Общий выходной редуктор 5 в описываемом варианте осуществления изобретения выполнен по схеме планетарного редуктора со сдвоенными сателлитами (см. схему на фиг. 3) и включает ведущее солнечное зубчатое колесо 34, сателлиты 35 с зубчатыми венцами 36 и 37, поддерживающее солнечное зубчатое колесо 38, неподвижный эпицикл 39 и подвижный эпицикл 40, являющий выходным элементом (звеном) планетарной передачи. Подвижный эпицикл 40 жестко закреплен в подвижном корпусе 13 общего выходного редуктора 5.
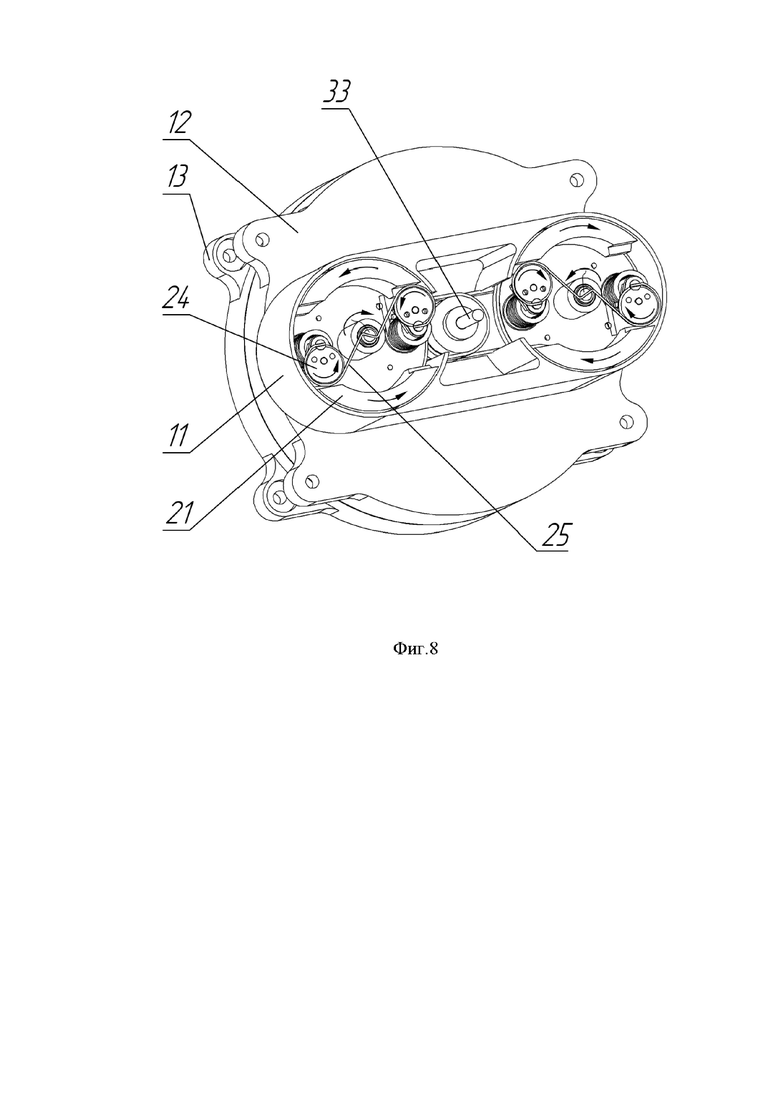
Предлагаемый шарнир с регулируемой жесткостью работает следующим образом. Работу шарнира в зависимости от направлений вращения одного и второго приводных двигателей можно разделить на два режима: регулировочный и основной (приводной). Работа механизмов регулировки жесткости (направления вращения) в этих режимах иллюстрируются на фиг. 8 и фиг. 9 соответственно (при этом показан вариант исполнения механизмов регулировки жесткости в соответствии с фиг. 6).
При синхронном вращении приводных двигателей 2 в противоположных направлениях (регулировочный режим работы шарнира) направления вращений выходных валиков 19 и связанных с ними подвижных корпусов 21 также должны быть противоположны, что означает невозможность вращения ведущего вала 33 общего выходного редуктора 5. В этом случае выходные валики 19 остаются неподвижны, а вращение входных валиков 18 через тросы 25 и эксцентриковые блоки 24 приводит к закрутке пружин кручения 26 (фиг. 6). Увеличение угла закрутки пружин кручения 26 вызывает увеличение силы, с которой они давят на выходные валики 19.
Воздействие внешней нагрузки на шарнир, т.е. внешнего крутящего момента на выходной фланец 6, вызывает прокручивание зубчатых колес общего выходного редуктора 5 благодаря свойству его обратимости и, таким образом, передается на общий ведущий вал 33, который стремится отклониться в ту или иную сторону в зависимости от направления приложенной к шарниру внешней нагрузки. Это вращение через ременные передачи 4 передается на выходные валики 19 механизмов регулировки жесткости 3. Для механизма регулировки жесткости, для которого направление вращения выходного валика 19 совпадает с направлением предварительной закрутки пружин(ы) кручения 26, это воздействие вызывает их(ее) еще большую закрутку и увеличение силы сопротивления внешнему воздействию. Таким образом, угловое отклонение выходного валика 19 от его начального положения будет тем меньше, чем большим был угол предварительной закрутки этих(этой) пружин(ы) кручения 26 в режиме регулировки жесткости шарнира (регулировочном режиме). Другими словами, увеличение угла закрутки двух механизмов регулировки жесткости 3 в регулировочном режиме работы шарнира соответствует увеличению его жесткости, т.е. уменьшению угла поворота выходного фланца 6 под действием данной внешней нагрузки.
При синхронном вращении приводных двигателей 2 в одном направлении (основной режим работы шарнира) направления вращений выходных валиков 19 и связанных с ними подвижных корпусов 21 также должны быть одинаковы, что означает однонаправленное движение двух ременных передач 4. Таким образом, вращение двух приводных двигателей 2 совместно передается на общий ведущий вал 33, а с него через общий выходной редуктор 5 на выходной фланец 6 шарнира.
Представленное описание двух режимов работы шарнира с регулируемой жесткостью дано для более ясного понимания принципа его работы. Очевидно, что работа шарнира возможна не только в двух описанных «чистых» режимах, но и в смешанном режиме работы, что означает возможность регулировки жесткости шарнира непосредственно в ходе его работы против внешней нагрузки, что обеспечивает возможность подстройки (адаптации) шарнира к изменяющимся условиям работы (величине внешней нагрузки, требованиям к проводимой операции).
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод струга или конвейера | 1982 |
|
SU1055555A1 |
| Устройство для дистанционного управления местной регулировкой положения ножа дукторного цилиндра красочного аппарата печатной машины | 1974 |
|
SU645856A1 |
| ДВУХКЛЕТЕВОЙ БЛОК ТРЕХРОЛИКОВЫХ КЛЕТЕЙ | 1999 |
|
RU2177385C2 |
| ДВУХКАЛИБРОВАЯ КОМБИНИРОВАННАЯ КЛЕТЬ | 1995 |
|
RU2088351C1 |
| Двухклетевой блок редукционного стана | 1981 |
|
SU997865A1 |
| Манипулятор | 1988 |
|
SU1590370A1 |
| НАСОС ПОРШНЕВОЙ РЕГУЛИРУЕМЫЙ | 1999 |
|
RU2169860C2 |
| Устройство для поворота и фиксации бабки изделия | 1982 |
|
SU1047669A1 |
| ВАКУУМНЫЙ СТАН ПОПЕРЕЧНО-КЛИНОВОЙ ПРОКАТКИ | 1996 |
|
RU2106223C1 |
| Электропривод трубопроводной арматуры с ручным дублером | 2022 |
|
RU2797329C1 |
Изобретение относится к области робототехники, а именно к приводным шарнирам роботизированных манипуляторов различного назначения, в том числе работающих в единой рабочей зоне с человеком или с объектами, требующими ограничения величины возможного силового воздействия на них. Шарнир с регулируемой жесткостью содержит корпус, два приводных двигателя, два механизма регулировки жесткости шарнира, выходной фланец шарнира. Приводные двигатели симметрично закреплены на корпусе шарнира. Содержит один общий выходной редуктор. Механизмы регулировки жесткости установлены между приводными двигателями и общим выходным редуктором. Каждый из механизмов регулировки жесткости содержит входной и выходной валики, не менее одного эксцентрикового блока, не менее одного троса и не менее одного упругого элемента. Валики установлены с возможностью вращения относительно друг друга вокруг общей оси этого механизма. Эксцентриковые блоки установлены на выходном валике с возможностью вращения относительно оси, параллельной общей оси механизма регулировки жесткости. Тросы закреплены с одной стороны на входном валике, а с другой стороны - на эксцентриковом блоке. Упругие элементы установлены с возможностью передачи упругого крутящего момента от эксцентрикового блока на выходной валик. Обеспечивается упрощение конструкции шарнира, снижение технологической сложности составляющих деталей, снижение механических потерь. 9 ил.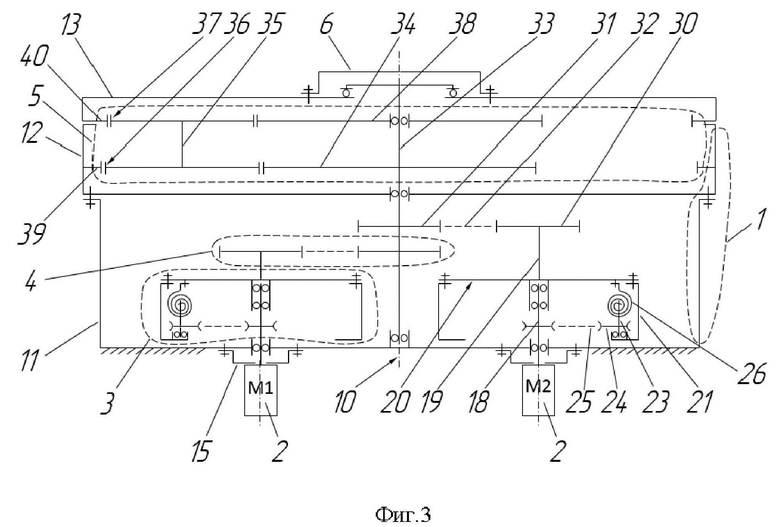
Шарнир с регулируемой жесткостью, содержащий корпус, два приводных двигателя, два механизма регулировки жесткости шарнира, выходной фланец шарнира, при этом приводные двигатели симметрично закреплены на корпусе шарнира, отличающийся тем, что содержит один общий выходной редуктор, механизмы регулировки жесткости установлены между приводными двигателями и общим выходным редуктором, каждый из механизмов регулировки жесткости содержит входной и выходной валики, установленные с возможностью вращения относительно друг друга вокруг общей оси этого механизма, не менее одного эксцентрикового блока, установленного на выходном валике с возможностью вращения относительно оси, параллельной общей оси механизма регулировки жесткости, не менее одного троса, закрепленного с одной стороны на входном валике, а с другой стороны - на эксцентриковом блоке, и не менее одного упругого элемента, установленного с возможностью передачи упругого крутящего момента от эксцентрикового блока на выходной валик.
| KR 20160084244 A, 13.07.2016 | |||
| CN 108297127 A, 20.07.2018 | |||
| CN 106914917 A, 04.07.2017 | |||
| CN 104608142 B, 08.06.2016 | |||
| ШАРНИР МАНИПУЛЯТОРА С РЕГУЛИРУЕМОЙ БЕЗЗАЗОРНОЙ ЗУБЧАТОЙ ПЕРЕДАЧЕЙ (ВАРИАНТЫ) | 2012 |
|
RU2497658C1 |
| Способ управления манипулятором | 1983 |
|
SU1127764A1 |

