Изобретение относится к области инженерной геодезии и может быть использовано для геотехнического/геодезического мониторинга надземных/подземных трубопроводов в труднодоступных арктических районах. Мониторинг осуществляют с использованием спутниковых радионавигационных систем в условиях отсутствия постоянного сигнала дифференциальной геодезической станции (ДГС) и мобильной связи, обязательной привязки ко всем ближним пунктам государственных геодезических и нивелирных сетей. Изобретение направлено на определение нормальных высот на Земной поверхности, для чего точкой отсчета служит один стабильный пункт с заданными пространственными координатами. В частности, изобретение используется в целях высотной высокоточной наблюдательной сети геотехнического мониторинга свайных опор трубопровода. Известен способ мониторинга состояния трассы магистрального трубопровода по патенту РФ №2699940 (МПК: G01C 11/04, дата публикации: 11.09.2019), согласно которому осуществляют аэрофотосъемку с одновременной записью спутниковых координат точек фотографирования; выполняют в геоинформационной системе привязку фотоснимков к трассе и объектам магистрального трубопровода; строят ортофотопланы или цифровые модели местности с использованием метода триангуляции данных фотоснимков; при этом аэрофотосъемку осуществляют по сигналу, передаваемому на фотокамеры приемником навигационной системы, обеспечивающему заданную периодичность фотосъемки с перекрытием снимков не менее 60%; запись спутниковых координат точек фотографирования выполняют за счет использования глобальной навигационной спутниковой системы геодезического класса с последующей обработкой полученных результатов измерений по методу точного позиционирования и присвоением полученных по результатам обработки спутниковых координат каждому фотоснимку; привязку фотоснимков к трассе и объектам магистрального трубопровода выполняют импортированием их в геоинформационную систему с предварительно внесенной в нее схемой трассы магистрального трубопровода; далее из массива геопривязанных фотоснимков в автоматизированном режиме выбирают фотоснимки объектов магистрального трубопровода с фактами нарушений и попытками несанкционированного доступа на трассе магистрального трубопровода, локализуют выявленные факты и отмечают их в геоинформационной системе; по построенным ортофотопланам или цифровым моделям местности выявляют и отмечают в геоинформационной системе опасные геологические процессы, происходящие на трассе магистрального трубопровода; выполняют наложение изображений ортофотопланов или цифровых моделей местности с опасными геологическими процессами, происходящими на трассе магистрального трубопровода и выполненными в разные временные периоды и имеющих одинаковые координаты; производят измерение геометрических параметров опасных геологических процессов, происходящих на трассе магистрального трубопровода, для осуществления дальнейшего контроля величины и скорости их изменения; по полученным измерениям осуществляют прогнозирование динамики развития опасных геологических процессов, происходящих на трассе магистрального трубопровода, и принимают решение об их устранении.
Общим признаком известного и заявленных решений является определение координат объектов трубопровода.
Однако известный способ направлен на мониторинг состояния трассы трубопровода и выявления попыток несанкционированного доступа, нарушений правил эксплуатации и опасных геологических процессов, происходящих на трассе трубопровода с использованием метода аэрофотосъемки без привязки к точности определения координат контролируемых пунктов.
Также известен способ геодезического мониторинга деформационного состояния земной поверхности на территории разрабатываемых открытым способом крупных рудных месторождений с применением технологии лазерного сканирования по патенту РФ 2698411 (МПК: G06T 17/05, G06T 17/20, G01C 3/00: дата публикации: 26.08.2019), согласно которому на контролируемой территории создают планово-высотное обоснование (ПВО), выполняют геодезические измерения с применением технологии лазерного сканирования контролируемой территории с привязкой к системе координат ПВО, получают результаты геодезических измерений на период времени, которые передают в персональный компьютер с программным обеспечением обработки, отображения и преобразования геопространственных данных, и получают облако точек результатов сканирования, которое используют для создания цифровых метрических 3D-моделей объектов и земной поверхности контролируемой территории, причем на контролируемой территории дополнительно создают геодинамический полигон (ГДП), на котором выполняют ПВО в условной системе координат с применением технологии высокоточного спутникового позиционирования.
Общими признаками известного и заявленного решений являются создание каркасной сети, определение координат объекта.
Однако в известном решении проводят геодезические измерения на геодинамическом полигоне открытых разрабатываемых рудных месторождений, которые являются площадными объектами небольшого периметра с применением высокоточного геометрического нивелирования, высокоточных гравиметрических измерений развитием сети планово-высотного обеспечения от постоянно действующих базовых станций GPS, так же применяют лазерное сканирование, которое теряет высокую точность на протяженных объектах и является труднодостижимой целью каждого цикла мониторинга.
Известен способ контроля положения трубопроводов надземной прокладки в условиях вечной мерзлоты по патенту РФ №2582428 (МПК: F17D 5/00, дата публикации: 27.04.2016), согласно которому устанавливают деформационные марки на сваи фундамента опоры трубопровода на расстоянии не менее 0,5 м от поверхности земли; устанавливают грунтовые глубинные репера, которые размещают на расстоянии не более 1,5 км друг от друга и не более 50 метров от опор; устанавливают референцные станции вдоль трубопровода на расстоянии 20-40 км друг от друга, которые выполнены с возможностью приема-передачи информации на сервер; при установке грунтовых глубинных реперов и референцных станций определяют их координаты в государственной сети, полученные координаты с помощью ключа переводят в местные координаты, которые передают на сервер, после чего в местной системе координат осуществляют нулевой цикл измерений координат деформационных марок относительно грунтовых глубинных реперов, по координатам марок определяют нулевое планово-высотное положение трубопровода, координаты марок также передают на сервер, и по результатам всех измерений строят проектную цифровую модель трубопровода; далее в процессе эксплуатации трубопровода осуществляют контрольные измерения координат деформационных марок, характеризующих текущее планово-высотное положение трубопровода, при этом контрольные измерения производят с помощью мобильных GPS/ГЛОНАСС приемников, обеспечивающих получение и передачу данных измерения на сервер, строят текущую цифровую модель трубопровода, которую сравнивают с проектной цифровой моделью трубопровода, и определяют участки трубопровода, на которых отклонение текущего его положения от проектного превышает допустимые значения, при этом контрольные измерения координат деформационных марок осуществляют не менее 1 раза в месяц в течение первого года эксплуатации трубопровода и не менее 2 раз в год.
Общими признаками известного и заявленного решений является создание геодезической сети (каркасной), установка грунтовых реперов проведение нулевого цикла измерений координат, определение координат деформационных марок трубопровода, определение деформаций трубопровода.
Однако в известном решении созданная геодезическая сеть имеет низкие точностные характеристики измерений, а именно: отсутствие цикличного контроля стабильности референцных станций (пунктов наблюдений) от пунктов государственной геодезической сети (ГГС) или ДГС, отсутствие контроля стабильности пунктов ГГС участвующие в создании и уравнивании сети референцных станций, необоснованной заявленной точности роутера в 25 мм при 8-10 км удаления от референцных станций, 40 мм при удалении 15-20 км от референцных станций. Также способ рассчитан на присутствие хорошей мобильной факсимильной связи GSM, а тип заложения грунтового репера со шнековым якорем не исключает пучения. То есть, для работы известного способа необходима стабильная мобильная связь GSM, которая не имеет полное покрытие в арктических районах. Соответственно точность определения координат трубопровода по известному способу ниже заявленного способа.
Также известен способ мониторинга надземных трубопроводов с помощью навигационных спутниковых систем (Мониторинг надземных трубопроводов с помощью глобальных навигационных спутниковых систем / А.С. Елизаров, А.Н. Курчатова // Вестник СГУГиТ - 2020 - Том 25, №1 - с. 28-42), в котором создают каркас высотной сети линейного объекта протяженностью 100 км, для чего располагают грунтовые реперы через 2 км, связывают полигоном каждый грунтовый репер, образовывая сеть из непрерывных треугольников. Для этого обеспечивают одновременную работу не менее трех ГНСС станций в течение 40 мин с дискретностью записи 5 с. Также выполняют одновременные статические наблюдения в течение 24 ч на пяти грунтовых реперах, расположенных через 20 км по трассе нефтепровода, с дискретностью записи 30 с., используют при уравнении каркасной сети данные точных орбит, точного времени спутников, предоставляемых ресурсами IGS, SOPAC, NASA. Определяют высоты деформационных марок с помощью «кинематики реального времени» (метод РТК/RTK) в радиорежиме, а именно выполняют наблюдения грунтовых реперов, устанавливают ретранслятор с мощностью радиосигнала 2 Вт оптимально через один грунтовый репер, контроль наблюдений производят путем набора контрольных измерений на деформационной марке.
Общими признаками заявленного и известных решений являются создание каркаса высотной сети трубопровода, для чего расставляют грунтовые репера; связывают полигоном каждый грунтовый репер, образовывая сеть из непрерывных треугольников, для чего обеспечивают одновременную работу не менее трех ГНСС станций; выполняют одновременные статические наблюдения в течение 24 ч на грунтовых реперах, расположенных через 20 км; уравнивают каркасную сеть данными точных орбит, точного времени спутников (эфемеридно-временная информация); определение высот деформационных марок путем выполнения наблюдений на грунтовых реперах, установки радимодема, проведения набора измерений на деформационной марке и определение деформаций путем сравнения набора измерений.
Однако известное решение направлено на определение деформаций свайных опор надземного трубопровода, протяженностью не более 100 км. Известный подход не позволяет создать каркас высотной основы деформационной геотехнической сети высокой точности, так как есть недостаточность решений для качественного соблюдения заявленной точности, режима измерений, метода уравнивания, не учитывает избыточности линейно-зависимых векторов, оценки стабильности как исходного пункта, так и грунтовых реперов суточного наблюдения, количества используемых международных пунктов геоцентрической системы ITRF, учета в анализе стабильности исходного пункта в Арктическом регионе воздействия касательных сил морозного пучения, что приводит к увеличению погрешности анализа и получению результата низкой точности. Так, в известном способе обеспечивают одновременную работу в течение 40 минут трех наземных геодезических ГНСС приемников, этого времени мало для качественного набора измерений и корректного уравнивания, из-за зависимости в «хорошей» геометрии спутниковых созвездий. В известном способе не предусмотрен контроль стабильности исходного пункта и пунктов из грунтовых реперов статических наблюдений, то есть способ не позволяет получить устойчивый каркас высотной основы геотехнической сети.
Техническая проблема заявленного технического решения совершенствование способа определения деформаций свайных опор трубопровода.
Технический результат - повышение точности определения деформаций свайных опор трубопровода от 20 до 200 км в труднодоступных арктических районах без стабильной мобильной связи за счет создания высокоточной каркасной сети (каркаса высотной основы геотехнической сети) и использования радиорежима, а также устранение выявленных деформаций, что позволяет увеличить срок службы и эффективность работы трубопровода.
Технический результат достигается за счет того, что способ определения деформаций свайных опор трубопровода с использованием навигационных спутниковых систем, который включает следующие этапы:
- создание каркаса высотной основы деформационной геотехнической сети трубопровода, для чего:
- устанавливают грунтовые реперы вдоль трубопровода на расстоянии 2-2,5 км друг от друга,
- связывают каждый грунтовый репер геодезическим полигоном от одного созвездия спутников, для чего обеспечивают одновременную работу в течение не менее 60 минут не менее трех наземных геодезических глобальной навигационной спутниковой системы (ГНСС) приемников, которые устанавливаются над грунтовыми реперами, при этом при их одновременной работе дискретность записи составляет 15 секунд и маска по углу возвышения составляет 10°,
- выполняют одновременные статические наблюдения от 24 часа, для наблюдаемой линий до 100 км, до 48 часов, для наблюдаемой линии до 200 км, на грунтовых реперах, расположенных друг от друга на расстоянии от 20 до 40 км, при этом включают один стабильный исходный пункт для возможности передачи пространственных координат на начало или центр каркаса высотной сети, стабильность исходного пункта и пунктов из грунтовых реперов статических наблюдений определяют параметрами X,Y,Z наблюдений от не менее 5 ближних международных пунктов в геоцентрической системе координат ITRF (International Terrestrial Reference Frame - Международная наземная система отсчета),
- определяют координатную привязку каркаса высотной сети,
- уравнивают каркас высотной основы деформационной геотехнической сети с использованием высокоточной эфемеридно-временной информации;
- определение высотных отметок деформационных марок свайных опор трубопровода для чего на каждом грунтовом репере последовательно ходу наблюдений устанавливается передающий геодезический ГНСС приемник с радиомодемом и производится фиксация текущих поправок координат и высот на каждой деформационной марке свайной опоры трубопровода с помощью другого принимающего геодезического ГНСС приемника с радиоантенной - ровера с точностью не более 20 мм;
- определение деформаций свайных опор трубопровода путем определения изменений координат и высот деформационных марок.
Таким образом, технический результат достигается за счет того, что каждый грунтовый репер связан полигоном от одного созвездия спутников, с одним стабильным исходным пунктом (ГГС или ДГС) для всей каркасной сети служащий точкой отсчета с заданными координатами, что позволяет построить высокоточную сеть без использования данных о геодинамических процессах в отличие от инженерно-геодезических изысканий и геодинамических полигонов, когда для создания исходной геодезической основы требуется использовать не менее 5 пунктов ГГС/ пунктов сгущения ГГС по высотному положению, а также выполнять измерения, уточняющие гравитационную аномалию высот земной поверхности на подрабатываемых территориях, рассчитывать точность координат всех исходных ближайших пунктов ГГС/пунктов сгущения ГГС, которые зачастую имеют невязку более 200 мм высотного положения в условиях Арктики. Диапазон расстановки грунтовых реперов (ГР) на расстояние 2-2,5 км друг от друга позволяет определить оптимальное расстояние между ГР в зависимости от протяженности (длины) трубопровода. Использование расстояния между ГР в 2-2,5 км обеспечивает получение устойчивого радиосигнала приемника-ровера в базовой комплектации при измерениях на деформационных марках в режиме RTK, без дополнительного усиления с помощью выносной радиоантенны, это решение облегчает и ускоряет производство измерений без потери точности 20мм. При расстановке ГР меньше чем 2 км увеличивается количество ГР, влияющее только на увеличение всех затрат по обеспечению мониторинга и следовательно, снижает эффективность производства. При расстановки ГР больше, чем 2,5 км мощность радиосигнала должна быть увеличена дополнительной радиоантенной, и чем выше антенна (высота подъема антенны на 8м обеспечит уверенный радиосигнал на 8-10км), тем дальше будет мощность радиосигнала, но в тундровой местности обеспечить подъем антенны на высоту слишком проблематично из-за постоянных сильных ветров, отсутствия высоких близкорасположенных объектов, куда нужно будет тянуть антенный кабель, что не является эффективным решением в труднодоступной местности тундры. Обеспечение одновременной работы не менее трех наземных ГНСС приемников в течение не менее 60 минут позволяет набрать достаточные данные для корректного уравнивания, что позволяет снизить погрешность плохой геометрии спутниковых созвездий и повысить использование финальных поправок к координатам спутников, и соответственно повысить точность создаваемого каркаса высотной основы геотехнической сети
Дискретность записи статических измерений в 15 секунд при обеспечении одновременной работы не менее трех наземных ГНСС приемников позволяет использовать меньше памяти приемника, тем самым увеличивает ресурс работы. Таким образом, 15 секунд оптимальное время дискретности записи, чтобы сохранить временной ресурс работы ГНСС приемников при наблюдениях полигонов и исключить его отключение во время работы.
Маска по углу возвышения в 10° при одновременной работе не менее трех наземных ГНСС приемников позволяет на момент работы приемников отсекать спутники, находящиеся вблизи горизонта, которые только увеличивают ошибку определения высот, тем самым повышая точность получаемого каркаса высотной основы деформационной геотехнической сети. Значение маски по углу возвышения больше, чем 10° для тундровой открытой территории в Арктике, снизит период одного созвездия спутников, что приведет к увеличению времени наблюдений или снижению точности положения определяемого пункта. Значение маски по углу возвышения меньше, чем 10° снизит точность измерений, так как радиосигнал спутника, находящегося вблизи горизонта, исказит точность определения высоты контролируемого объекта.
За счет того, что есть возможность использовать диапазон времени выполнения статических наблюдений (от 24 до 28 часов), при этом для трубопровода длиной от 0 до 100 км проводят наблюдения 24 часа, а для трубопровода длиной от 101 до 200 км проводят наблюдения 48 часов, за счет чего получают более высокоточный каркас геотехнической сети. То есть, чем длиннее протяженность трубопровода, тем больше времени стояния ГНСС станций над грунтовыми реперами (ГР) необходимо для обеспечения достаточными спутниковыми данными при уравнивании каркасной сети, следовательно, выше точность определения координат деформационных марок свайных опор трубопровода.
При этом, стабильность исходного пункта и пунктов из грунтовых реперов статических наблюдений определяют параметрами X,Y,Z наблюдений от 5-ти ближних международных пунктов в геоцентрической системе координат ITRF, что позволяет получить устойчивый каркас высотной основы геотехнической сети. Особенностью стабильности исходного пункта в Арктическом регионе является воздействие касательных сил морозного пучения, при этом необходимо учитывать фактор континентального сдвига Земли, определяемый взаимным пространственно-временным положением международных опорных пунктов. То есть, убирая величину сдвига с полученных пространственно-временных координат исходного пункта ГГС/ДГС, получают достоверные данные об устойчивом состоянии пунктов каркаса высотной основы геотехнической сети. Тем самым, повышается точность получения деформаций свайных опор трубопровода.
Таким образом, получают высокоточный каркас высотной основы деформационной геотехнической сети, который позволяет при дальнейших наблюдения в режиме RTK получать более точные координаты деформационных марок, и соответственно получать точную информацию о деформациях трубопровода.
При реализации изобретения трубопровод может иметь длину от 20 км до 200 км.
При одновременной работе наземных геодезических ГНСС приемников в количестве больше 3 время работы приемников могут увеличивать пропорционально расстоянию дальних приемников. То есть, если, например, обеспечивают одновременную работу 4 наземных геодезических ГНСС приемников, при этом расстояние между каждым соседними приемниками составляет 2 км, то время работы приемников увеличится на 30 минут, то есть общее время работы приемников составит 90 мин. Данное время, так же, дополнительно оптимизирует работу одной бригады в условиях труднопоходимой тундры, так как необходимо вернуться за ГНСС приемниками для их последующей перестановки вперед по каркасной сети.
При реализации изобретения в качестве стабильного исходного пункта могут использовать пункт государственной геодезической сети (ГГС) или дифференциальную геодезическую станцию (ДГС). Стабильный исходный пункт могут располагать в начале или середине (центре) каркаса высотной основы деформационной геотехнической сети. При использовании в качестве стабильного исходного пункта ГГС/ДГС пространственные координаты могут передавать по цепочке триангуляционных полигонов от остальных грунтовых реперов (ГР) с начального пункта сети или с центрального пункта сети. То есть, в зависимости от расположения трубопровода определяют стабильный исходный пункт - либо ГГС либо ДГС - с известными пространственными координатами, при этом этот стабильный исходный пункт (начальный) располагают в начале или середине (центре) сети, что позволяет равномерно распределить ГР и уравнивать пространственные координаты всей сети линейного объекта (трубопровода).
При использовании в качестве стабильного исходного пункта ДГС необходимо исключать векторы содержащие кодовые навигационные данные пересекающихся во времени набора данных ГНСС приемников с наименьшим временем стояния либо плохой геометрией спутникового созвездия (величина PDOP - фактор снижения точности по местоположению для исключения их влияния на качество спутниковых данных, не более 2). Например, вектор (расстояние между ГР/наблюдаемая линия) 2,5 км должен выстаиваться не менее 60 мин, вектор 100 км - не менее 24 ч, вектор 200 км - не менее 48 ч, не допуская избыточности линейно-зависимых векторов и соответственно не допуская увеличения погрешности уравнивания каркаса высотной основы геотехнической сети. А при наблюдаемой линии в 2,5 км время не менее 60 минут позволяет набрать достаточные данные для корректного уравнивания, что позволяет снизить погрешность плохой геометрии спутниковых созвездий и повысить использование финальных поправок к координатам спутников.
При реализации изобретения высокоточную эфемеридно-временную информацию могут получать от ИАЦ КВНО АО «ЦНИИ маш» Информационно-аналитического центра ГЛОНААС. Высокоточная эфемеридно-временная информация позволяет повысить точность навигационных координат каркаса высотной основы.
При реализации изобретения при статических наблюдениях должна соблюдаться точность измерений (наблюдений) линий /векторов каркасной сети, которая должна быть не более mдоп.=(5+1*10-6*D),
где mдоп. - допустимая погрешность измерения длины линии,
D - измеренное расстояние, м.
При реализации изобретения в случае использования передающего геодезического ГНСС приемника с радиомодемом мощностью радиосигнала не менее 2 Вт, такой приемник могут устанавливать через один грунтовый репер при хорошем радиосигнале.
При реализации изобретения точность установки радиомодема над грунтовыми реперами в плане и высоте не более 2 мм. Точность взаимного положения ГР каркасной сети - 15 мм.
Изобретение поясняется следующими фигурами:
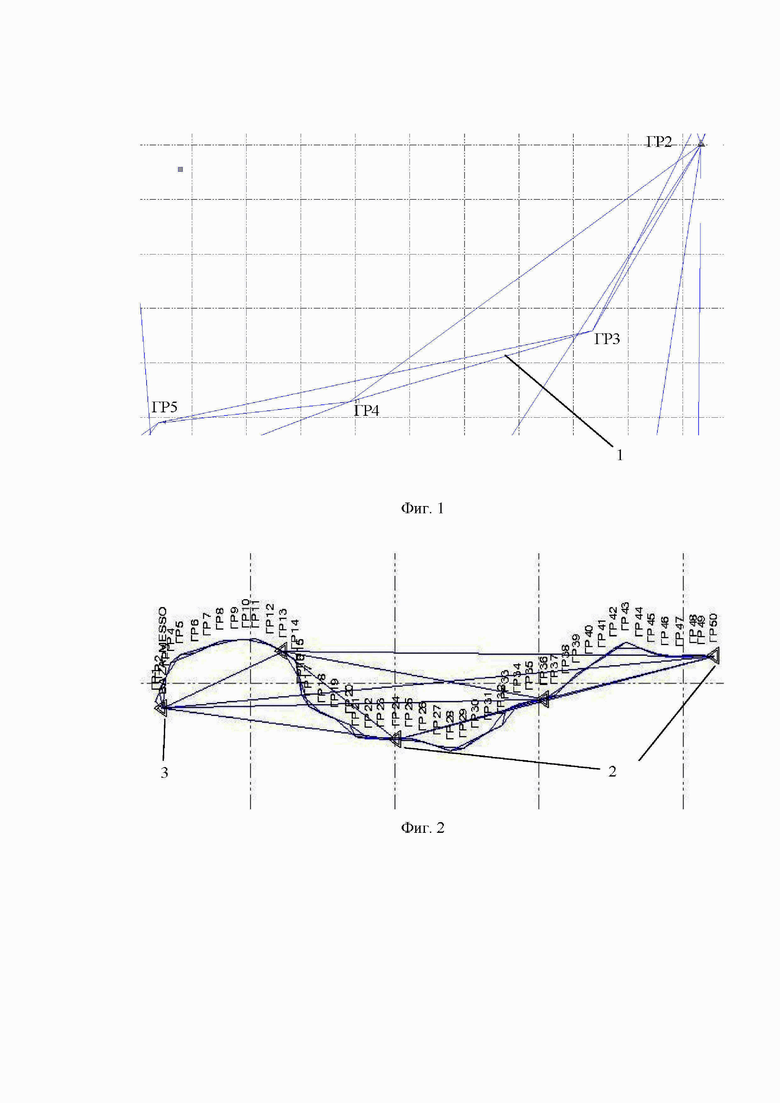
Фиг. 1 - пример схемы обвязки спутниковых полигонов;
Фиг. 2 - пример расстановки пунктов для выполнения статических наблюдений (для трубопровода протяженностью 100 км);
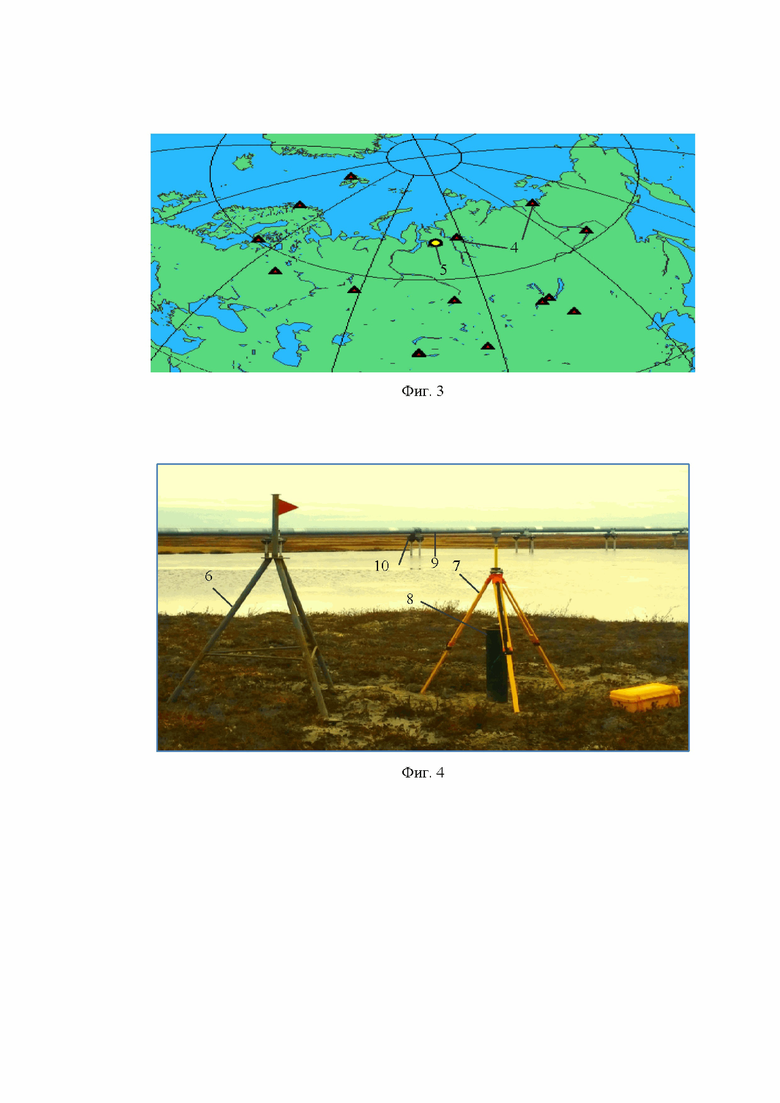
Фиг. 3 - обзорная карта выбора ближних международных опорных пунктов в геоцентрической системе координат ITRF;
Фиг. 4 - измерение координат и высотных отметок с помощью ГНСС приемников для определения деформаций свайных опор трубопровода: установка ГНСС приемников над ГР;
Фиг. 5 - измерение координат и высотных отметок деформационных марок с помощью ГНСС приемников для определения деформаций свайных опор трубопровода: выполнение наблюдений в РТК радио-режиме,
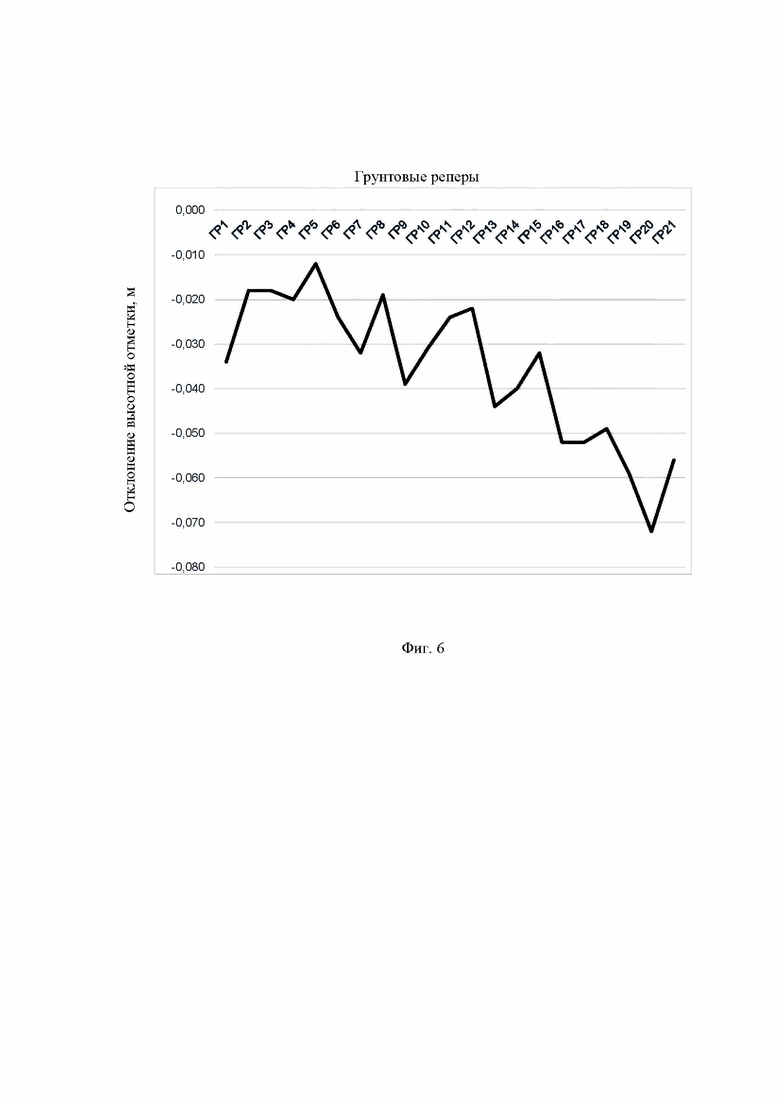
Фиг. 6 - график отклонений высотных отметок грунтовых реперов каркаса высотной основы до внесения в проект спутниковых наблюдений суточных измерений и высокоточной эфемеридно-временной информации.
На фигурах приняты следующие обозначения:
ГР - грунтовый репер, при этом ГР1…ГРn -указание порядкового номера грунтового репера,
1 - сеть из непрерывных треугольников,
2 - выбранные грунтовые реперы для выполнения одновременных статических наблюдений от 24 до 48 часов,
3 - ДГС, расположенная в начале каркасной сети,
4 - местоположение международных пунктов ITRF (международные геодезические сети),
5 - местоположение нефтепровода,
6 - охранный указательный знак ГР (металлическая.пирамида-опознавательный знак устанавливаемый над ГР),
7 - наземный геодезический приемо-передающий ГНСС приемник,
8 - грунтовый репер,
9 - нефтепровод,
10 - свайная опора надземного нефтепровода,
11 - принимающий ГНСС приемник (ровер, ретранслятор),
12 - адаптер для установки прибора на веху,
13 - диск металлический (для установки на деформационную марку),
14 - геодезическая веха для приемнных отражателей и ГНСС приемников,
15 - деформационная марка,
16 - ростверк.
Изобретение реализуют следующим образом.
Перед выполнением способа могут предварительно разработать план проведения работ по заявленному изобретению. Для этого определяют оптимальное расстояние между грунтовыми реперами исходя из длины трубопровода и рельефа местности (возможности их установки, наличия электромагнитных помех, «затенение» части небосвода препятствиями - PDOP и т.д.). Предпочтительно использовать ГНСС приемники одного производителя, чтобы лишний раз избежать конвертации в общепринятый формат обмена данными Rinex. Деформационные марки располагают на каждой свае опор трубопровода.
Первоначально создается каркас высотной основы деформационной геотехнической сети трубопровода. Для чего устанавливают грунтовые реперы вдоль трубопровода на расстоянии 2-2,5 км друг от друга. Далее связывают каждый грунтовый репер геодезическим полигоном от одного созвездия спутников, тем самым образовывая сеть из непрерывных треугольников для чего обеспечивают одновременную работу в течение не менее 60 минут не менее трех наземных ГНСС приемников, которые устанавливаются над грунтовыми реперами. ГНСС приемники могут быть с функцией передачи, могут быть только с функцией приема данных. Установку ГНСС приемника над грунтовым репером требуется производить с точностью не более 2 мм (в плане и высоте). При том, при одновременных наблюдениях для увязки каждого ГР геодезическим полигоном, дискретность записи составляет 15 секунд, а маска по углу возвышения составляет 10°. Такие параметры одновременной работы обеспечивают создание более оптимального периода наблюдений и точного каркаса высотной основы деформационной геотехнической сети, так как исключаются непредвиденные отключения ГНСС приемников при наблюдениях из-за переполнении памяти приемника и отсекаются спутники находящиеся в горизонте спутниковых созвездий, которые снижают качество определения высоты исследуемых точек. При этом, если одновременно обеспечивают работу больше 3 ГНСС приемников, то время работы увеличивают пропорционально расстоянию дальних приемников. Затем полученная непрерывная сеть полигонов каркаса усиливается одновременными (для жесткости каркаса) статическими наблюдениями (работой) от 24 до 48 часов в зависимости от длины трубопровода на грунтовых реперах с помощью ГНСС приемников, которые расположены через 20-40 км друг от друга в зависимости от длины трубопровода. Для трубопровода (трассы) протяженностью до 100 км выполняют наблюдения за 24 часа и при этом на ГР, расположенных через 20-30 км, а для трассы протяженностью до 200 км одновременные наблюдения на грунтовых реперах увеличиваются до 2 суток (48 часов) с наблюдениями на ГР, расположенных через 40 км. При этом, включают один стабильный исходный пункт (ДГС или ГГС), который расположен в начале или середине (центре) каркаса геотехнической сети. Стабильный исходный пункт используется для возможности передачи пространственных координат на начало или центр каркаса высотной сети. Стабильность исходного пункта и пунктов из ГР статических наблюдений определяют параметрами X, Y, Z наблюдений от не менее 5 ближних международных пунктов в геоцентрической системе координат ITFR. Временной интервал (от 24 часов до 48 часов) обусловлен необходимостью максимального исключения в сигнале спутников «шумов», имеющие медленный характер определения, а также применения достаточного набора поправок орбит и точного времени спутников. При построении высокоточной высотной сети должна использоваться мультисистемная, многочастотная спутниковая аппаратура с точностью статических измерений не ниже 5 + 0,5 мм/км СКО. Координатную привязку каркаса высотной сети определяют для всех последующих измерений выбранной, как при начальном цикле наблюдений (измерений), то есть такую же координатную привязку, как и при этапах связывания каждого грунтового репера геодезическим полигоном от одного созвездия спутников и при одновременных статических наблюдениях от 24 до 48 часов. После получения финальных эфемерид космических аппаратов (эфемеридно-временная информация) выполняется уравнивание каркаса всей свободной сети с точностью не ниже 15 мм. Такую информацию могут получать от ИАЦ КВНО АО «ЦНИИ маш» Информационно-аналитического центра ГЛОНААС. Пространственные координаты, для привязки каркасной сети к конкретным выбранным координатам, передаются от одного стабильного исходного пункта: либо ГГС, либо ДГС. Исходными координатами также могут являться координаты: местной системы, государственной системы, глобальной системы ПЗ-90/WGS84, международной сети ITRF. Созданный каркас высотной основы геотехнической сети (в том числе расстановка и распределение приемников остаются неизменными для последующих циклов наблюдений).
После завершения высокоточных наблюдений каркасной сети выполняют полевые работы по определению высотных отметок деформационных марок методом RTK (Real Time Kinematic, кинематика реального времени в радиодиапазоне). Радиорежим (позиционирование в реальном времени) оптимален для выполнения работ в труднодоступных арктических районах. Для этого устанавливают передающий (базовый) ГНСС приемник с радиомодемом (ретранслятор, ровер) над грунтовыми реперами, при этом точность установки радиомодема на грунтовом репере в плане и высоте должна быть не грубее 2 мм. Маска по углу возвышения настраивается в зависимости от условий видимости, однако рекомендуемое оптимальное значение также - 10°. Предпочтительнее использовать радиомодем с мощностью не менее 2 Вт., при этом установка радиомодема в таком случае возможна через один грунтовый репер в зависимости от рельефа местности. При наличии ДГС, транслирующей поправки (точностью 20 мм) к координатам в радиорежиме на расстоянии уверенного сигнала от передающей антенны, возможно исключение установки радиомодема над грунтовым репером. Принимающее устройство позиционируют с точностью текущих поправок к получаемым координатам по высоте до 20 мм. Фиксируют с помощью принимающего ГНСС приемника с радиоантенной текущие поправки к координатам и высотам на каждой деформационной марке свайной опоры трубопровода. Полученные координаты вносятся в каталог пространственного положения исследуемого объекта.
При этом, осуществляют поправку программы производства работ каркаса высотной основы деформационной геотехнической сети при возникновении случаев утраты/ смены местоположения грунтовых реперов, корректировке наблюдений из-за изменений условий открытого горизонта наблюдений, застроенности инфраструктурой, влиянию электропомех не менее 1 раза в 5 лет. Поправку осуществляют с целью выявления и устранения критических изменений в каркасе, что влияет на точность определения высотных отметок, соответственно самих деформаций.
Рассмотрим более подробно реализацию способа.
Создают каркас высотной основы деформационной геотехнической сети надземного трубопровода. Для этого устанавливают грунтовые реперы вдоль трубопровода на расстоянии 2-2,5 км друг от друга. То есть, если трубопровод имеет длину 200 км, то устанавливают от 80 до 100 грунтовых реперов в зависимости от выбора расстояния между ГР. Или, например, имеется трубопровод, длина которого составляет 100 км. Расстояние между ГР исходя из рельефа местности было выбрано в 2 км. Таким образом, получилось 50 грунтовых реперов вдоль линейного участка трубопровода, длина которого 100 км. Далее связывают каждый грунтовый репер (например, из установленных 50 штук) геодезическим полигоном от одного созвездия спутников, для чего обеспечивают одновременную работу не менее трех наземных геодезических ГНСС приемника, которые устанавливаются над данными грунтовыми реперами. На фиг. 1 показан пример схемы обвязки спутниковых полигонов. То есть, для этого с помощью ГНСС приемников производится их установка над грунтовыми реперами (ГР) так, чтобы каждый ГР был связан спутниковым геодезическим полигоном от одного созвездия спутников. На фиг. 1 видна часть сети из непрерывных треугольников. Для этого требуется обеспечить одновременную работу не менее трех ГНСС станций при времени наблюдений на одном полигоне - не менее 60 мин. с расстановкой ГНСС станций через 2-2,5 км. То есть, в нашем примере обеспечивают одновременную работу в течение 60 минут трех ГНСС приемников, которые расположили над ГР, расположенными последовательно на расстоянии 2 км друг от друга). Если ГНСС станций больше 3, то время стояния ГНСС приемников следует увеличивать пропорционально расстоянию от дальних приемников. Параметры наблюдений над ГР: дискретность записи наблюдений устанавливается на 15 сек, маска по углу возвышения на 10°, PDOP ограничивается не более 2. На фиг. 6 показан график отклонений высотных отметок грунтовых реперов каркаса высотной основы до внесения в проект спутниковых наблюдений суточных измерений и высокоточной эфемеридно-временной информации. По графику видно, что создаваемый каркас при удалении от точки отсчета начинает набирать погрешность - изгиб, за счет разной точностной информации быстрых эфемерид спутниковых данных, геометрии спутниковых полигонов, малом времени определения «шумов» получаемого радиосигнала.
Затем выполняют одновременные статические наблюдений от 24 до 48 часов на грунтовых реперах, расположенных друг от друга на расстоянии от 20 до 40 км, при этом включают один стабильный исходный пункт (ГГС/ДГС - в начале или середине высотной каркасной сети). На фиг. 2 показан также пример каркасной высотной сети протяженностью 100 км с расстановкой пунктов 2 (ГР для наблюдений) для жесткости каркаса через 20 км, при этом исходный пункт с пространственными координатами - Дифференциальная геодезическая станция (ДГС) 3 в начале каркасной высотной сети. ГР расположены на расстоянии друг от друга 2 км. Расстояния между ГР для выполнения суточных наблюдений в данном примере составляет 20 км. Время одновременных наблюдений в данном примере составило 24 часа. Также может быть включен исходный пункт Государственной геодезической сети (ГГС). ДГС или ГГС включаются для возможности передачи пространственных координат на начало /центр каркасной высотной сети. Оптимальные параметры наблюдений над ГР: дискретность записи наблюдений устанавливается на 30 сек, маска по углу возвышения на 10°, PDOP ограничивается не более 2. Временной интервал (от 24 до 48 ч) обусловлен необходимостью максимального исключения в сигнале спутников «шумов», имеющих медленный характер определения, а также применения достаточного набора качественных поправок орбит и точного времени спутников. ГР, которые выбраны для суточных измерений имеют дополнительный контроль устойчивости за счет возможности уравнивания от международных опорных пунктов в системе координат ITRF.
Так при этом, стабильность исходного пункта ГГС/ДГС и стабильность пунктов из ГР статических наблюдений - их пространственно-временное положение в каждом цикле определяется параметрами X,Y,Z на эпоху наблюдений от 5 ближних международных опорных пунктов в системе координат ITRF. Сравнивая каждый последующий цикл с начальным принимается решение о его стабильности. На фиг. 3 показана карта с выделением ближних международных опорных пунктов 4 в системе координат ITRF (5 - местоположение трубопровода). Особенностью стабильности исходного пункта в Арктическом регионе является воздействие касательных сил морозного пучения, при этом необходимо учитывать фактор континентального сдвига Земли, определяемый взаимным пространственно-временным положением международных опорных пунктов убирая эту величину сдвига с полученных пространственно-временных координат исходного пункта ГГС/ДГС.
При включении пункта ГГС/ДГС в каркасную сеть пространственные координаты передаются по цепочке триангуляционных полигонов от остальных ГР с начального пункта сети, либо на центральный пункт сети.
При использовании в каркасной высотной сети станции ДГС необходимо учитывать то, что при каждом периоде наблюдений по ГР в связке с ДГС начинается запись нового вектора-периода наблюдений, в этом случае необходимо отсекать векторы станций с наименьшим временем стояния: вектор 2,5 км должен выстаиваться не менее 60 мин, вектор до 100 км - не менее 24 ч, вектор до 200 км - не менее 48 ч, или плохой геометрий спутникового созвездия не допуская избыточности линейно-зависимых векторов, что приводит к увеличению погрешности уравнивания каркасной сети.
Далее определяют координатную привязку каркаса высотной сети, так же как при начальном цикле измерений деформаций (статические наблюдения от 24 до 48 часов). Вариация координатной привязки каркасной сети, перехода с геоцентрических координат (X,Y,Z) на прямоугольные (X, Y, Н) либо только геоцентрические утверждается при выполнении начального цикла измерения деформаций, т.е. как будет определено начальным циклом (при статических наблюдений), так и будет продолжаться в наблюдениях следующих циклов. При этом осуществляют поправку каркаса высотной основы деформационной геотехнической сети при возникновении случаев утраты/ смены местоположения грунтовых реперов, корректировке наблюдений из-за изменений условий открытого горизонта наблюдений, застроенности инфраструктурой, влиянию электропомех не менее 1 раза в 5 лет. Исходными координатами могут являться координаты: местной системы, государственной системы, глобальной системы ПЗ-90/WGS84, международной сети ITRF.
Получают высокоточную эфемеридно-временную информацию для уравнивания полученного каркаса высотной сети. Окончательное уравнивание каркасной сети выполняется после получения высокоточной эфемеридно-временной информации, например, от отечественного ресурса: РФИАЦ КВНО АО «ЦНИИмаш» Информационно-аналитического центра ГЛОНАСС (ftp://ftp.glonass-iac.ru/MCC/PRODUCTS/), оценка точности измерений не более 15 мм во внутренней сходимости всех пунктов каркасной высотной сети и сходимости цикличных наблюдений выполняется после отчета об уравнивании и сравнении длин векторных линий. В таблице 1 приведены допустимые параметры точности каркасной сети (ГКИНП-01-271-03. Руководство по созданию и реконструкции городских геодезических сетей с использованием спутниковых систем ГЛОНАСС, GPS).
Таблица 1. Допустимые параметры точности каркасной сети
Затем переходят ко второму этапу способа - спутниковое нивелирование по определению высот деформационных марок трубопровода с помощью метода «кинематики реального времени» в радиорежиме на протяженном участке. То есть, определяют высотные отметки деформационных марок свайных опор трубопровода для чего на каждом грунтовом репере последовательно, начиная с исходного пункта с использованием приемника с радиомодемом замеряют текущие координаты деформационных марок. Для чего (фиг. 4) устанавливают базовый приемник с радиомодемом (ретранслятор) 7 только над грунтовыми реперами 8, при этом точность установки ретранслятора над грунтовым репером в плане и высоте выполняют не грубее 2 мм. Мощность радиосигнала ретранслятора - не менее 2 Вт. При этом, установка ретранслятора с мощностью радиосигнала не менее 2 Вт возможна через один грунтовый репер (если расстояние между ГР 2км), в зависимости от рельефа местности. При наличии дифференциальной геодезической станции (ДГС), транслирующей поправки (точностью 20 мм) к координатам в радио-режиме на расстоянии уверенного сигнала от передающей антенны, установку ретранслятора над грунтовым репером можно исключить. Геометрия спутников при наблюдениях должна быть не более величины «2» PDOP (PDOP - фактор снижения точности по местоположению, PDOP²=HDOP²+VDOP², где HDOP (Horizontal Dilution of Precision) - снижение точности в горизонтальной плоскости, VDOP (Vertical) - снижение точности в вертикальной плоскости). Запись данных регулируется ГНСС контроллером. Контроль наблюдений производят на стыках зон работы от разных грунтовых реперов путем набора контрольных измерений с помощью принимающего ГНСС приемника 11 на деформационной марке 15. Данные сохраняются в один файл для их дальнейшей обработки.
Далее осуществляют последующие определения координат высотных отметок (последующие циклы - как описано выше) и определяют деформации свайных опор трубопровода путем изменения координат при начальном измерении. Таких измерений могут производить несколько раз в год. В таблице 2 приведен результат измерения высотных отметок выборочных деформационных марок в 2017 году (1 -е измерение), в 2019 и 2022 годах. И определили разницу высот, что и является показателем деформированного состояния свайных опор. Так, например, для деформационной марке под номером 13-1 разница высот между измерениями в 2017 и 2019 годах составила -0,016 м, а разница между измерениями в 2019 году и 2022 году составила 0,001 м, говорит, что на фундаменте, где смонтирована ДМ, ДМ имеет стабильное положение в рамках заявленной точности, соответствия схемы наблюдений циклов и точности уравнивания. После определения высот всех деформационных марок свайных опор трубопровода принимают решение о критичности таких деформаций и формируют план работ по устранению таких деформаций. Так, например, для деформационной марки под номером 13-20 разница между измерениями в 2017 и 2022 году составила 0,107 м, это говорит о воздействии сил морозного пучения на сваю в следствии чего пучение сваи составило 0,107м. Для приведения сваи в нормативное состояние потребовались следующие мероприятия: противопучинные работы, обрезка сваи до проектного положения и дополнительный мониторинг высотного положения в периоды промерзания грунта пока не убедились о стабильном состоянии.
В случае если трубопровод подземный, с разными вариантами укладки (либо с подземным свайным основанием, либо просто уложен в траншее в теплоизоляционном слое), то реализация способа аналогично примеру выше. В этом случае, деформационная марка крепится либо к подземным свайным опорам, либо к самому трубопроводу с помощью хомута и возвышается над поверхностью земли не менее 1 метра.
Таким образом, получают точную информацию о деформации свайных опор трубопровода (линейного участка трубопровода) за счет создания высокоточного каркаса высотной основы геотехнической сети и использования режима RTK, что позволяет оперативно устранить выявленных деформации.
Таблица 2. Итоговый каталог деформационной сети линейного объекта (выборочная выгрузка из каталога).

Изобретение относится к области инженерной геодезии и может быть использовано для геотехнического/геодезического мониторинга надземных/подземных трубопроводов в труднодоступных арктических районах. Технический результат - повышение точности определения деформаций свайных опор трубопровода от 20 до 200 км в труднодоступных арктических районах без стабильной мобильной связи за счет создания высокоточной каркасной сети и использования радиорежима, а также устранение выявленных деформаций, что позволяет увеличить срок службы и эффективность работы трубопровода. Способ определения деформаций свайных опор трубопровода с использованием навигационных спутниковых систем, отличающийся тем, что каждый грунтовый репер связывают геодезическим полигоном от одного созвездия спутников, для чего обеспечивают одновременную работу в течение не менее 60 минут не менее трех наземных геодезических глобальной навигационной спутниковой системы (ГНСС) приемников, которые устанавливаются над грунтовыми реперами, при этом при их одновременной работе дискретность записи составляет 15 секунд и маска по углу возвышения составляет 10°, выполняют одновременные статические наблюдения от 24 до 48 часов, для наблюдаемой линий до 100 км или до 200 км соответственно; на грунтовых реперах, расположенных друг от друга на расстоянии от 20 до 40 км, при этом включают один стабильный исходный пункт для возможности передачи пространственных координат на начало или центр каркаса высотной сети, стабильность исходного пункта и пунктов из грунтовых реперов статических наблюдений определяют параметрами X,Y,Z наблюдений от не менее 5 ближних международных пунктов в геоцентрической системе координат ITRF (International Terrestrial Reference Frame - Международная наземная система отсчета), определяют координатную привязку каркаса высотной сети, уравнивают каркас высотной основы деформационной геотехнической сети с использованием высокоточной эфемеридно-временной информации; определение высотных отметок деформационных марок свайных опор трубопровода, для чего на каждом грунтовом репере последовательно ходу наблюдений устанавливается передающий геодезический ГНСС приемник с радиомодемом и производится фиксация текущих поправок координат и высот на каждой деформационной марке свайной опоры трубопровода с помощью другого принимающего геодезического ГНСС приемника с радиоантенной - ровера с точностью не более 20 мм; определение деформаций свайных опор трубопровода путем определения изменений координат и высот деформационных марок. 10 з.п. ф-лы, 6 ил.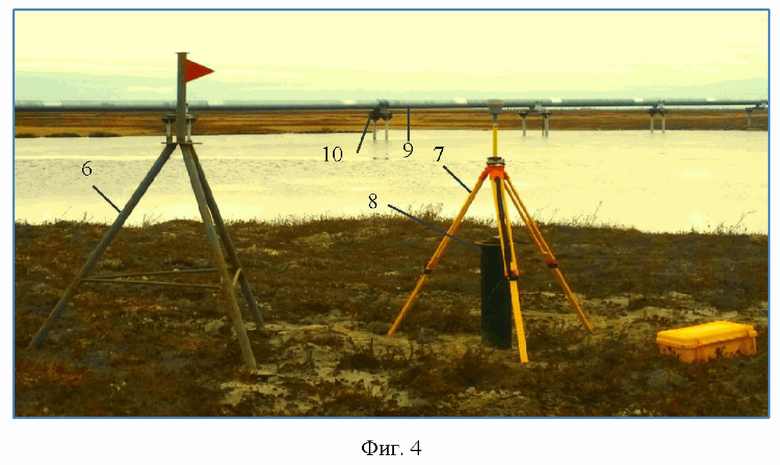
1. Способ определения деформаций свайных опор трубопровода с использованием навигационных спутниковых систем, который включает следующие этапы:
- создание каркаса высотной основы деформационной геотехнической сети трубопровода, для чего:
устанавливают грунтовые реперы вдоль трубопровода на расстоянии 2-2,5 км друг от друга,
связывают каждый грунтовый репер геодезическим полигоном от одного созвездия спутников, для чего обеспечивают одновременную работу в течение не менее 60 минут не менее трех наземных геодезических глобальной навигационной спутниковой системы (ГНСС) приёмников, которые устанавливаются над грунтовыми реперами, при этом при их одновременной работе дискретность записи составляет 15 секунд и маска по углу возвышения составляет 10°,
выполняют одновременные статические наблюдения от 24 часов - для наблюдаемой линий до 100 км, до 48 часов - для наблюдаемой линии до 200 км, на грунтовых реперах, расположенных друг от друга на расстоянии от 20 до 40 км, при этом включают один стабильный исходный пункт для возможности передачи пространственных координат на начало или центр каркаса высотной сети, стабильность исходного пункта и пунктов из грунтовых реперов статических наблюдений определяют параметрами X, Y, Z наблюдений от не менее 5 ближних международных пунктов в геоцентрической системе координат ITRF,
определяют координатную привязку каркаса высотной сети,
уравнивают каркас высотной основы деформационной геотехнической сети с использованием эфемеридно-временной информации;
- определение высотных отметок деформационных марок свайных опор трубопровода, для чего на каждом грунтовом репере последовательно ходу наблюдений устанавливается передающий геодезический ГНСС приёмник с радиомодемом и производится фиксация текущих поправок координат и высот на каждой деформационной марке свайной опоры трубопровода с помощью другого принимающего геодезического ГНСС приёмника с радиоантенной – ровера с точностью не более 20 мм;
- определение деформаций свайных опор трубопровода путем определения изменений координат и высот деформационных марок.
2. Способ определения деформаций свайных опор трубопровода по п. 1, в котором трубопровод имеет длину от 20 км до 200 км.
3. Способ определения деформаций свайных опор трубопроводов по п. 1, в котором при одновременной работе наземных геодезических ГНСС приемников в количестве больше 3 время работы приемников увеличивают пропорционально расстоянию дальних приемников.
4. Способ определения деформаций свайных опор трубопроводов по п. 1, в котором в качестве одного стабильного исходного пункта используют пункт государственной геодезической сети (ГГС) или дифференциальную геодезическую станцию (ДГС).
5. Способ определения деформаций свайных опор трубопровода по п. 1, в котором стабильный исходный пункт располагают в начале или середине каркаса высотной основы деформационной геотехнической сети.
6. Способ определения деформаций свайных опор трубопроводов по п. 4, в котором при использовании в качестве стабильного исходного пункта ГГС/ДГС пространственные координаты передают по цепочке триангуляционных полигонов от остальных грунтовых реперов с начального пункта сети или с центрального пункта сети.
7. Способ определения деформаций свайных опор трубопроводов по п. 4, в котором при использовании в качестве стабильного исходного пункта ДГС исключают векторы, содержащие кодовые навигационные данные пересекающихся во времени набора данных ГНСС приемников с наименьшим временем стояния либо плохой геометрией спутникового созвездия.
8. Способ определения деформаций свайных опор трубопроводов по п. 1, в котором
соблюдают точность измерений длин линий при статических наблюдениях не более mдоп.=(5+1*10-6* D),
где mдоп. – допустимая погрешность измерения длины линии,
D – измеренное расстояние, м.
9. Способ определения деформаций свайных опор трубопроводов по п. 1, в котором эфемеридно-временную информацию получают от ИАЦ КВНО АО «ЦНИИ маш» Информационно-аналитического центра ГЛОНААС.
10. Способ определения деформаций свайных опор трубопроводов по п. 1, в котором в случае использования передающего геодезического ГНСС приёмника с радиомодемом мощностью радиосигнала не менее 2 Вт, при этом такой приемник устанавливают через один грунтовый репер.
11. Способ определения деформаций свайных опор трубопроводов по п. 8, в котором точность установки радиомодема над грунтовыми реперами в плане и высоте не более 2 мм.

