Изобретение относится к сельхозмашиностроению, в частности к автономному техническому средству, выполняющему в автоматическом режиме посадку картофеля без участия человека, и может быть использовано для посадки картофеля на дачных участках, в фермерских хозяйствах и предприятиях товарного агропромышленного производства, занимающихся выращиванием картофеля.
Уровень техники
В большинстве известных устройств для посадки картофеля автоматическое устройство понимается как автоматическая укладка клубней в ложечки посадочного устройства.
Например, известна картофелесажалка с ручным управлением, агрегатированная с мотоблоком, бункер которого оборудован распределителем клубней: Автоматическая САМОСАЖАЛКА https://www.youtube.com/watch?v=5USvBebxKIQ
Например, известно техническое решение по патенту RU №2726435 С1 А01С 9/04 (2006.01) с датой приоритета 19.12.2019 г., по которому МАШИНА ДЛЯ ПОСАДКИ КАРТОФЕЛЯ НА СЕМЕНА С АКТИВНЫМИ ГРЯДООБРАЗОВАТЕЛЯМИ содержит бункер с наклонным дном, в котором расположены регулируемые створки, регулирующие зазор к питающему ковшу, в котором установлены виброплиты и ворошители, а также ложечно-дисковый высаживающий аппарат с ложечками, к которым подпружинены пальцы зажимов с фиксацией в нижней части ложечно-дискового высаживающего аппарата и ослаблением при подходе к клубнепроводу, соединенному с сошником, к которому также закреплен тукопровод, при этом рабочие органы высаживающего аппарата приводятся в движение от ВОМ трактора посредством малого редуктора и цепной передачи, высаживающие аппараты выполнены с диапазоном регулировок на ширину междурядья 50-75 см, позади защитного кожуха установлен щиток, выполненный в форме необходимого профиля гряды, за которым установлен прикатывающий каток, кроме того, на раме закреплены опорные и копирующие колеса, заделывающие диски, а также система автоматической сцепки.
К недостаткам данной машины можно отнести отсутствие возможности автоматической высадки картофеля в гряды с шириной междурядья менее 75 см., что не дает возможности высадки картофеля на семена, а также необходимость агрегатирования с тракторами высокого тягового класса, то есть использование ГСМ, участие оператора.
Известно техническое решение по патенту RU №152400 U1 А01С 9/02 (2006.01) с датой приоритета 06.06.2014, по которому КОМБИНИРОВАННАЯ КАРТОФЕЛЕСАЖАЛКА содержит раму с замком автосцепки, опорно-приводные колеса, высаживающие аппараты элеваторно-цепного типа с ложечками и кожухом или без кожуха и с чашечками, которые на левой ветви цепи закреплены своей заборной частью вверх, питательный и загрузочный бункеры, привод высаживающих аппаратов, сошники и дисковые бороздозакрыватели, причем впереди каждого высаживающего аппарата установлены сиденья для сажальщиков, против которых закреплены площадки для размещения рабочих емкостей с семенным материалом. Недостатком комбинированной картофелесажалки является невозможность применить ее на автоматической и полуавтоматической посадке картофеля, а также необходимость агрегатирования с тракторами высокого тягового класса, то есть использование ГСМ, участие оператора.
Известны примеры использования оборудования для посадки картофеля без участия человека, работающих в режиме автономного и беспилотного управления, на основе трактора-беспилотника.
Например, многозадачный автономный носитель навесного оборудования Robotti датского производителя Agrointelli впервые высадил картофель на площадке в Нидерландском городе Лелистаде, которая была представлена на выставке Potato Europe 2021. Машина Robotti является частью совместного проекта роботизации компаний WUR, Agrointelli и Dewulf. Для показательного эксперимента Robotti был агрегирован с четырехрядной чашечной сажалкой Miedema CP 42 (https://glavpahar.ru/news/avtonomnyy-robot-robotti-vpervye-vysadil-kartofel)
Еще пример, оборудование Blue White Robotics превращает обычный трактор в беспилотник (https://glavpahar.ru/news/blue-white-robotics-prevratit-obychnyy-traktor-v-bespilotnik). Израильская компания Blue White Robotics разработала новую систему и комплект оборудования для автономного управления трактором, благодаря которому из машины возможно сделать универсального робота, способного работать как в автономном, так и ручном режиме. Система включает в себя GPS-модуль, датчики LiDAR, оптические камеры, бампер, способный распознавать препятствие, а также четыре внешних аварийных выключателя, с помощью которых можно остановить трактор, не поднимаясь в кабину. Запустив соответствующее программное обеспечение, пользователи определяют рабочие зоны трактора на цифровой карте. Аппаратура использует эти данные для настройки геозоны, благодаря чему агрегат передвигается исключительно в пределах установленных границ. В Blue White Robotics отмечено, что система уже была успешно протестирована в садах и виноградниках в регионах западного побережья США, где ее задействовали для опрыскивания и скашивания растений, а также для культивации почвы.
Общий недостаток известных примеров автономной посадки без участия человека: необходима установка дополнительного оборудования для беспилотного управления, при этом трактор используется как привод, а также требуется дополнительный агрегат для посадки картофеля, используется ГСМ.
Наиболее близким по конструктивным признакам к заявляемому техническому решению является техническое решение по патенту RU 2733285 C1 А01М 5/04 (2020.05) с датой приоритета 16.01.2020 г., по которому Устройство для уничтожения колорадских жуков на посадках картофеля представляет собой самоходную платформу, которая автономно перемещается по рядам картофеля, состоит из рамы с колесами и механизма сбрасывания жуков. На раму установлены электродвигатели, соединенные с источником питания через контроллер. К контроллеру подключены GPS модуль и камера контроля курса. Устройство содержит блок обработки изображения, ко входу которого подключена камера системы распознавания, а выход подключен ко входу контроллера, выходы которого соединены с механизмом сбрасывания жуков и с распылителем, который подключен к баку с инсектицидом.
Указанное техническое решение близко по конструкции, но имеет иное назначение, более узкое, соответственно и более простую конструкцию, и не решает поставленную задачу - автоматическое устройство для посадки картофеля без участия человека.
Известно техническое решение по патенту RU №152400 U1 А01С 9/02 (2006.01) с датой приоритета 06.06.2014, по которому КОМБИНИРОВАННАЯ КАРТОФЕЛЕСАЖАЛКА содержит раму с замком автосцепки, опорно-приводные колеса, высаживающие аппараты элеваторно-цепного типа с ложечками и кожухом или без кожуха и с чашечками, которые на левой ветви цепи закреплены своей заборной частью вверх, питательный и загрузочный бункеры, привод высаживающих аппаратов, сошники и дисковые бороздозакрыватели, причем впереди каждого высаживающего аппарата установлены сиденья для сажальщиков, против которых закреплены площадки для размещения рабочих емкостей с семенным материалом.
Недостатком комбинированной картофелесажалки является невозможность применить ее на автоматической и полуавтоматической посадке картофеля, а также необходимость агрегатирования с тракторами тягового класса
Указанные аналоги имеют общие недостатки - необходимость агрегатирования с тракторами тягового класса, использование ГСМ, необходимость непосредственного участия человека в процессе посадки. Существующие технические решения предлагают два основных направления: во-первых, в настоящее время широко используется механизированный способ посадки картофеля, когда трактор тянет за механизированную установку; во-вторых, в мировой практике разработан способ посадки картофеля, при котором механизированный посадочный агрегат тянет тяговый робот трактор-беспилотник.
При существующем уровне техники посадка картофеля - это энергоемкий и трудоемкий технологический процесс и на него предприятия агропромышленного комплекса тратят много времени, сил и энергии, а в конечном итоге финансовых средств. Кроме того, современные способы посадки картофеля сопровождаются использованием горюче-смазочных материалов (далее ГСМ) что увеличивает расходы на их приобретение, хранение, утилизацию. Кроме того использование ГСМ приводит к вредным выбросам в атмосферу и вредному влиянию на окружающую среду. После посадки картофеля происходит процесс ухода, который является сложным, многоэтапным процессом и имеет те же проблемные факторы. Используется множество агрегатов на технологических процессах посадки и ухода при производстве картофеля. Для осуществления подобных операций можно применить заявляемый автоматический комплекс за счет смены рабочих органов.
Недостатки существующих устройств для посадки картофеля устраняет заявляемое изобретение.
Для предприятий агропромышленного комплекса важно снизить затраты на технологический процесс посадки картофеля, путем снижения затрат и средств на оплату труда трактористов-машинистов, на снижение энергоемкости агрегата и как следствие на приобретение, хранение и утилизацию отходов ГСМ. Кроме того, важно снижение вредного влияния на окружающую среду и сохранение природных ресурсов и атмосферы. Проблема решается путем разработки нового технического средства позволяющего выполнить технологический процесс посадки картофеля в автоматическом режиме без использования труда человека и ГСМ, а также дальнейшего его использования при обработке и уходе культуры. Это позволит снизить энергозатраты и трудозатраты, и повысить энергоэффективность и экономическую эффективность при посадке картофеля.
Сущность изобретения
Задача заявляемого изобретения - создание автономного технического комплекса для посадки картофеля, выполняющего технологический процесс посадки картофеля без участия человека.
Для решения этой задачи предлагается конструкция автоматического технического комплекса, выполняющего в автоматическом режиме посадку картофеля без участия человека с использованием средств навигации и заданной программной функцией. В качестве средств навигации может использоваться, беспилотный летательный аппарат (далее БПЛА), например, квадрокоптер DJI Phantom 4 RTK.
Автоматический комплекс состоит из автоматического посадочного устройства и беспилотного летательного аппарата (БПЛА), например, квадрокоптера. Автоматическое посадочное устройство содержит раму, шасси, бункер, верхний технологический уровень, нижний технологический уровень, при этом рама установлена на шасси, на раме закреплены бункер, нижний и верхний технологические уровни. Верхний технологический уровень состоит из механизма подъема бункера и посадочного модуля с приводом рабочего вала. Нижний технологический уровень состоит из двух отвалов и уплотнителя. Передний отвал предназначен для создания борозды, задний отвал для создания гребня а уплотнитель для уплотнения гребня. В задней части автоматического посадочного устройства на раме установлены опорные колеса, в передней части установлен блок аккумуляторов и солнечная панель, а сверху принимающее устройство с возможностью передачи сигнала на контроллер автоматического посадочного устройства. В средней части на раме под бункером установлен управляющий контроллер. Квадрокоптер оборудован передающим устройством с возможностью передачи сигнала на принимающее устройство посадочного устройства. Контроллер автоматического посадочного устройства оснащен программным обеспечением с возможностью обработки сигнала и создания на его основе алгоритма движения, после получения которых автоматическое посадочное устройство начинает движение и переходит в рабочий режим технологического процесса посадки.
Совместная работа комплекса в паре автоматического посадочного устройства с БПЛА (квадрокоптером) заключается в следующем. Автоматическое посадочное устройство подъезжает к участку и останавливается. В это время квадрокоптер облетает участок на низких высотах, с помощью машинного обучения распознает границы участка, осуществляет расчет размеров и конфигурации участка и передает данные по каналу беспроводной связи, например, Bluetooth, на принимающее устройство автоматического посадочного устройства.
Для корректной работы квадрокоптера необходимо привести участок, предназначенный для посадки, к прямоугольному виду и задать границы участка. В случае, если размеры поля небольшие, можно промаркировать границы участка с помощью специальных меток (qr-кодов), распознаваемых камерой квадрокоптера. Для участков большой площади удобно задавать границы участка с помощью GPS-координат. В этом случае, точность достигается в несколько метров.
Квадрокоптер передает данные о размерах участка на приемник (принимающее устройство), который установлен на автоматическом посадочном устройстве. Далее на основании размеров участка контроллер автоматического посадочного устройства определяет площадь участка, маршрут и порядок движения, а также наличие препятствий и запускает технологический процесс. После чего автоматическое посадочное устройство начинает движение и переходит в рабочий режим технологического процесса посадки. Дополнительная функция БПЛА - осуществление контроля качества технологического процесса и предупреждения о препятствии.
При этом заявляемый комплекс обеспечивает экологический чистый способ посадки картофеля без участия человека, без применения ГСМ, менее трудоемкий и энергоемкий, а также создаст предпосылки для повышения эффективности производства картофеля, снижения затрат и экономии финансовых средств. Проблема, вызванная недостатками существующих подходов к процессу посадки картофеля решается путем разработки нового технического средства позволяющего выполнить технологический процесс посадки картофеля в автоматическом режиме без использования труда человека и ГСМ, а также дальнейшего его использования при обработке и уходе культуры.
Принцип работы автоматического комплекса следующий: БПЛА поднимается над полем и сканирует участок, его рельеф и размер, затем передает посредством передающего устройства сигнал на принимающее устройство автоматического посадочного устройства. Контроллер автоматического посадочного устройства обрабатывает сигнал и создает алгоритм движения. После чего автоматическое посадочное устройство начинает движение и переходит в рабочий режим технологического процесса посадки: устройство заезжает на поле, останавливается и переходит в рабочее положение. При этом опускается передний отвал, задний отвал и уплотнитель. После этого запускается вращение рабочего вала, высевающего модуля и устройство начинает движение. Передний отвал создает борозду, в которую из высевающего модуля падает семенной материал, задний отвал создает гребень, а уплотнитель уплотняет почву гребня. Механизм подъема бункера осуществляет подъем бункера по мере уменьшения в бункере семенного материала. Блок аккумуляторов осуществляет питание приводных механизмов, солнечная панель осуществляет подзарядку аккумулятора увеличивая время работы блока аккумуляторов. Контроллер осуществляет управление движением и работой верхнего и нижнего технологического уровня за счет его программирования. Автоматическое посадочное устройство осуществляет процесс посадки картофеля за счет созданного алгоритма программы и ее передачи на контроллер.
После завершения работы автоматическое посадочное устройство останавливается и принимает транспортное положение, при этом прекращается вращение рабочего вала, поднимаются передний отвал, задний отвал и уплотнитель, механизм подъема бункера опускается и встает в первоначальное положение. После этого устройство начинает движение до места стоянки.
Эффективность автоматического комплекса для посадки картофеля может быть существенно повышена за счет его использования в обработке и уходу за культурой путем смены рабочих органов. Не исключается также применение комплекса для посадки других сельскохозяйственных культур, например, бобовых.
Технический результат - полная автоматизация технологического процесса посадки семенного материала картофеля.
Технический результат достигается конструкцией автоматического комплекса для посадки картофеля, состоящего из автоматического посадочного устройства и БПЛА, характеризующейся тем, что автоматическое посадочное устройство содержит раму, шасси, опорные колеса, бункер, привод, верхний технологический уровень, нижний технологический уровень, при этом рама установлена на шасси, на раме закреплены бункер, нижний и верхний технологические уровни; верхний технологический уровень состоит из механизма подъема бункера и посадочного модуля с приводом рабочего вала, нижний технологический уровень состоит из двух отвалов и уплотнителя; передний отвал установлен с возможностью создания борозды, задний отвал установлен с возможностью создания гребня, а уплотнитель установлен с возможностью уплотнения гребня; в задней части автоматического посадочного устройства на раме установлены опорные колеса; в передней части автоматического посадочного устройства установлен блок аккумуляторов и солнечная панель, в средней части автоматического посадочного устройства на раме под бункером установлен управляющий контроллер, в верхней части между солнечной панелью и бункером установлено принимающее устройство, а БПЛА оснащен камерой и передающим устройством.
Как частный случай, в качестве БПЛА используется квадрокоптер. Автоматическое посадочное устройство оснащено блоком аккумуляторов с возможностью осуществления питания приводных механизмов автоматического посадочного устройства. Солнечная панель автоматического посадочного устройства установлена с возможностью осуществления подзарядки аккумуляторов автоматического посадочного устройства для увеличения времени работы блока аккумуляторов. Контроллер автоматического посадочного устройства установлен с возможностью управления движением и работой верхнего и нижнего технологического уровня за счет его программирования. Контроллер автоматического посадочного устройства оснащен программным обеспечением с возможностью управления технологическим процессом посадки картофеля за счет алгоритма программы. Кроме того, рабочие органы нижнего технологического уровня автоматического посадочного устройства установлены с возможностью замены.
Автоматический комплекс для посадки картофеля работает следующим образом. Квадрокоптер поднимается над полем и сканирует участок, его рельеф и размер. Затем передает посредством передающего устройства сигнал на принимающее устройство автоматического посадочного устройства. Контроллер автоматического посадочного устройства обрабатывает сигнал и создает алгоритм движения. После чего автоматическое посадочное устройство начинает движение и переходит в рабочий режим технологического процесса посадки: автоматическое посадочное устройство заезжает на поле, останавливается и переходит в рабочее положение. При этом опускается передний отвал, задний отвал и уплотнитель. После этого запускается вращение рабочего вала, высевающего модуля и автоматическое посадочное устройство начинает движение. Передний отвал создает борозду, в которую из высевающего модуля падает семенной материал, задний отвал создает гребень, а уплотнитель уплотняет почву гребня. Механизм подъема бункера осуществляет подъем бункера по мере уменьшения в бункере семенного материала. Блок аккумуляторов осуществляет питание приводных механизмов, солнечная панель осуществляет подзарядку аккумулятора увеличивая время работы блока аккумуляторов. Контроллер осуществляет управление движением и работой верхнего и нижнего технологического уровня за счет его программирования. Автоматическое посадочное устройство осуществляет процесс посадки картофеля за счет созданного алгоритма программы и ее передачи на контроллер. После завершения работы автоматическое посадочное устройство останавливается и принимает транспортное положение, при этом прекращается вращение рабочего вала, поднимаются передний отвал, задний отвал и уплотнитель, механизм подъема бункера опускается и встает в первоначальное положение. После этого автоматическое посадочное устройство начинает движение до места стоянки.
Сущность технического решения поясняют изображения на фиг. 1-5, где
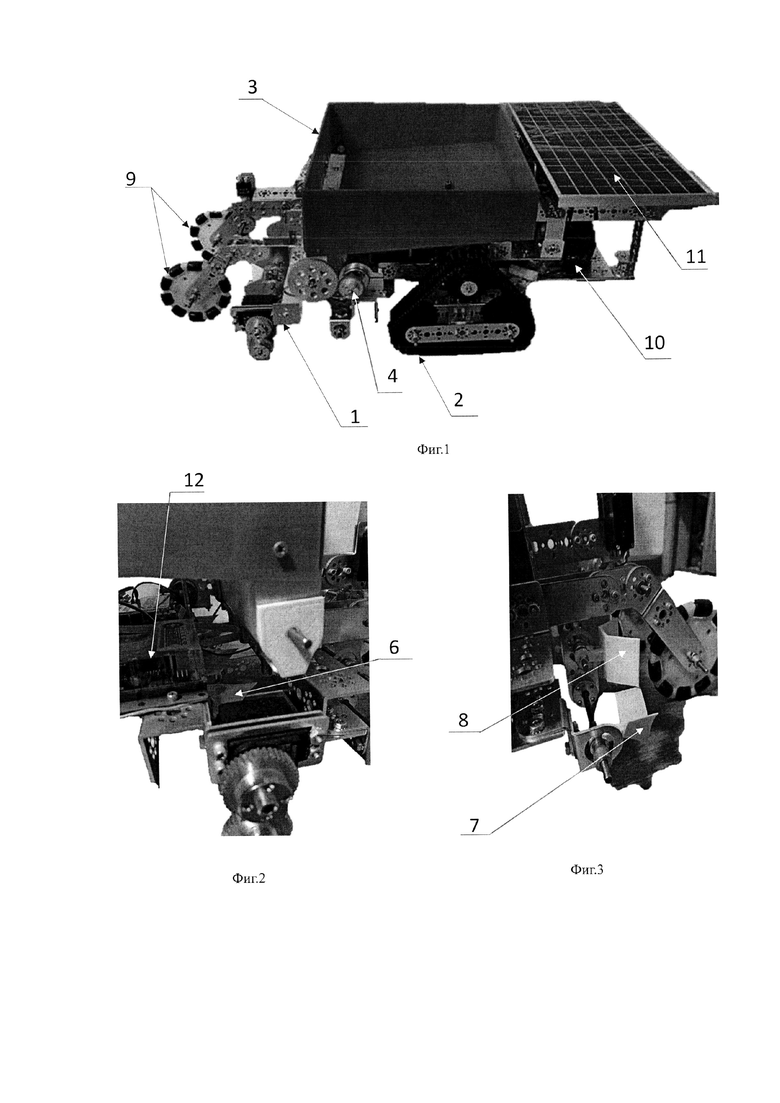
Фиг. 1 - Общий вид (вид справа);
Фиг. 2 - фрагмент вида слева;
Фиг. 3 - фрагмент вида слева задняя часть;
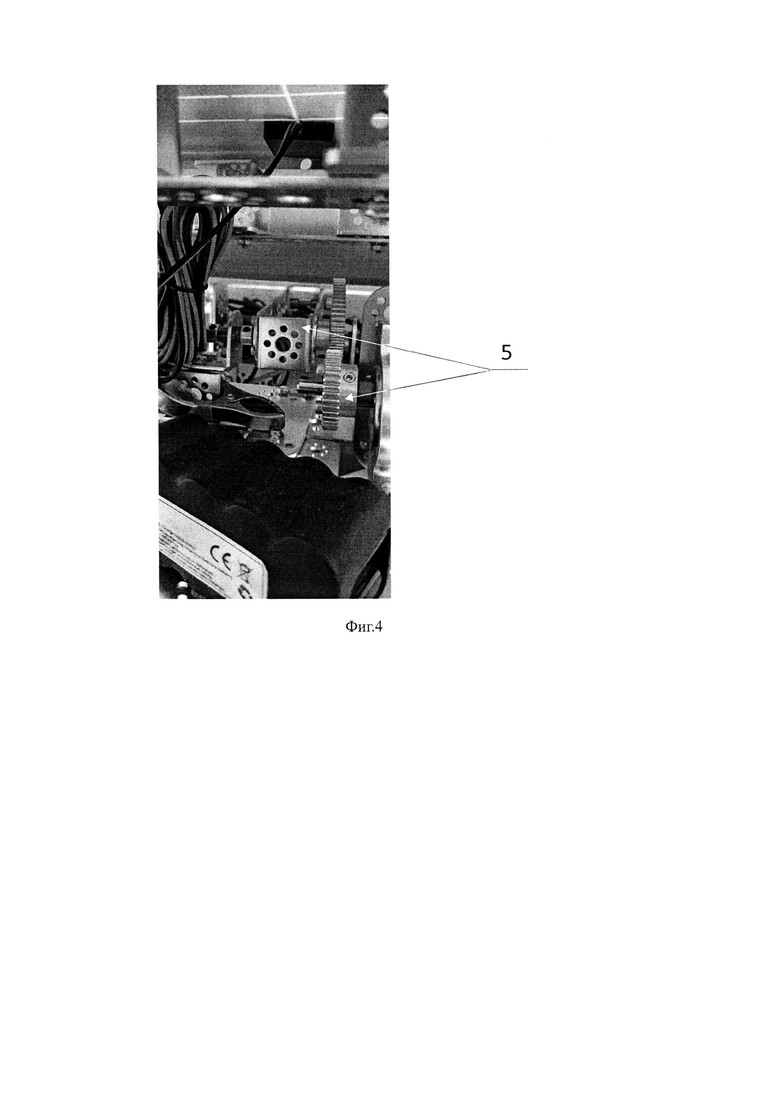
Фиг. 4 - фрагмент вида спереди.
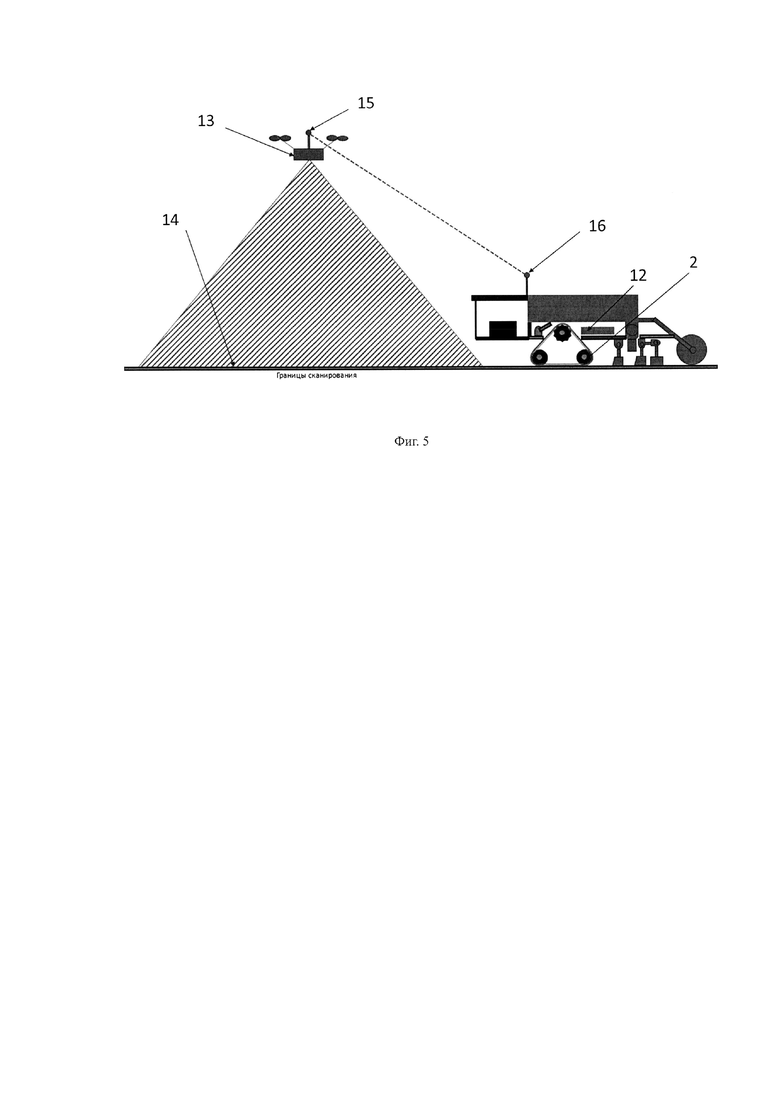
Фиг. 5 - схема работы автоматического комплекса: посадочного устройства в паре с квадрокоптером.
Где 1 - рама;
2 - шасси;
3 - бункер;
4 - рабочий вал;
5 - механизм поъема бункера;
6 - передний отвал;
7 - задний отвал;
8 - уплотнитель;
9 - опорные колеса;
10 - блок аккумуляторов;
11 - солнечная панель;
12 - управляющий контроллер (контроллер);
13 - БПЛА (квадрокоптер);
14 - участок посадки семенного материала;
15 - передающее устройство квадрокоптера;
16 - принимающее устройство автоматического посадочного устройства.
Пример осуществления.
Автоматический комплекс для посадки картофеля состоит из автоматического посадочного устройства и БПЛА 13, например, квадрокоптера DJI Phantom 4 RTK. Автоматическое посадочное устройство содержит раму 1 закрепленную на шасси 2. На раме крепятся верхний технологический уровень и нижний технологический уровень. Верхний технологический уровень состоит из бункера 3 высевающего модуля с рабочим валом 4 и механизма подъема бункера 5. Нижний технологический уровень состоит из переднего отвала 6, заднего отвала 7 и уплотнителя 8. В задней части автоматического посадочного устройства на раме установлены опорные колеса 9.
В передней части автоматического посадочного устройства установлен блок аккумуляторов 10 и солнечная панель 11, В средней части на раме 1 под бункером 3 установлен управляющий контроллер 12. В передней части автоматического посадочного устройства сверху между солнечной панелью 11 и бункером 5 установлено принимающее устройство 16 с возможностью передачи сигнала на контроллер 12 автоматического посадочного устройства.
Автоматический комплекс для посадки картофеля работает следующим образом. Квадрокоптер 13 поднимается над полем и сканирует участок 14, его рельеф и размер. Затем передает посредством передающего устройства 15 сигнал на принимающее устройство автоматического посадочного устройства 16. Контроллер 12 автоматического посадочного устройства обрабатывает сигнал и создает алгоритм движения. После чего автоматическое посадочное устройство начинает движение и переходит в рабочий режим технологического процесса посадки.
Автоматическое посадочное устройство заезжает на поле, останавливается и переходит в рабочее положение. При этом опускается передний отвал 6, задний отвал 7 и уплотнитель 8. После этого запускается вращение рабочего вала 4 высевающего модуля и посадочное устройство начинает движение. Передний отвал 6 создает борозду, в которую из высевающего модуля падает семенной материал, задний отвал 7 создает гребень, а уплотнитель 8 уплотняет почву гребня. Механизм подъема бункера 5 осуществляет подъем бункера 3 по мере уменьшения в бункере 5 семенного материала.
Блок аккумуляторов 10 осуществляет питание приводных механизмов, солнечная панель 11 осуществляет подзарядку аккумулятора, увеличивая время работы блока аккумуляторов. Контроллер 12 осуществляет управление движением и работой верхнего и нижнего технологического уровня за счет его программирования. Устройство осуществляет процесс посадки картофеля за счет созданного алгоритма программы и ее передачи на контроллер.
После завершения работы автоматическое посадочное устройство останавливается и принимает транспортное положение, при этом прекращается вращение рабочего вала 4, поднимаются передний отвал 6, задний отвал 7 и уплотнитель 8 механизм подъема бункера опускается и встает в первоначальное положение. После этого автоматическое посадочное устройство начинает движение до места стоянки.
Для корректной работы квадрокоптера 13 необходимо привести участок 14, предназначенный для посадки, к прямоугольному виду и задать границы участка. В случае, если размеры поля небольшие, можно промаркировать границы участка с помощью специальных меток (qr-кодов), распознаваемых камерой квадрокоптера 13. Для участков большой площади удобно задавать границы участка 14 с помощью GPS-координат.В этом случае, точность достигается в несколько метров.
Квадрокоптер 13 передает данные о размерах участка 14 на приемник 16, который установлен на автоматическом посадочном устройстве. Далее на основании размеров участка 14 контроллер квадрокоптера 13 высчитывает маршрут движения и запускает технологический процесс.Дополнительная функция квадрокоптера 13 во время работы -осуществление контроля качества технологического процесса и предупреждения о препятствии.
Таким образом, заявляемое изобретение решает поставленную задачу - создание автономного технического комплекса для посадки картофеля, выполняющего технологический процесс посадки картофеля без участия человека с использованием средств навигации и заданной программной функцией. В качестве средств навигации может использоваться, например, квадрокоптер DJI Phantom 4 RTK.
Заявляемое техническое решение удачно соединяет в одном комплексе все необходимые условия, повышающие эффективность и экологическую безопасность: автономный привод, основанный на электродвигателях, блоки непосредственной обработки почвы и посадки семенного картофеля с использованием солнечных батарей для подзарядки аккумуляторов, используемых как источник питания. Заявляемое изобретение позволяет достичь технического результата - полной автоматизации технологического процесса посадки семенного материала картофеля.
| название | год | авторы | номер документа |
|---|---|---|---|
| УНИВЕРСАЛЬНЫЙ КОМПЛЕКС ДЛЯ ВОЗДЕЛЫВАНИЯ КАРТОФЕЛЯ | 2008 |
|
RU2369073C1 |
| ВОЗДУХОПЛАВАТЕЛЬНЫЙ АППАРАТ | 2016 |
|
RU2642210C1 |
| САЖАЛКА КАРТОФЕЛЯ | 1996 |
|
RU2110169C1 |
| ВОЗДУХОПЛАВАТЕЛЬНЫЙ АППАРАТ | 2016 |
|
RU2659147C1 |
| ВОЗДУХОПЛАВАТЕЛЬНЫЙ АППАРАТ | 2015 |
|
RU2581971C1 |
| ВОЗДУХОПЛАВАТЕЛЬНЫЙ АППАРАТ | 2016 |
|
RU2643306C1 |
| МАШИНА ДЛЯ ПОСАДКИ КАРТОФЕЛЯ НА СЕМЕНА С АКТИВНЫМИ ГРЯДООБРАЗОВАТЕЛЯМИ | 2019 |
|
RU2726435C1 |
| Квадрокоптер | 2020 |
|
RU2734680C1 |
| ВОЗДУШНОЕ ТАКСИ | 2015 |
|
RU2609660C1 |
| Способ посадки семенного картофеля и внесения органоминеральных удобрений в лунки с применением мотоблока и устройства для его осуществления | 2016 |
|
RU2657019C2 |
Изобретение относится к области сельскохозяйственного машиностроения. Автоматический комплекс для посадки картофеля состоит из автоматического посадочного устройства и БПЛА. Автоматическое посадочное устройство содержит раму, шасси, опорные колеса, бункер, привод, верхний технологический уровень, нижний технологический уровень. Рама установлена на шасси. На раме закреплены бункер, нижний и верхний технологические уровни. Верхний технологический уровень состоит из механизма подъема бункера и посадочного модуля с приводом рабочего вала. Нижний технологический уровень состоит из двух отвалов и уплотнителя. Передний отвал установлен с возможностью создания борозды, задний отвал установлен с возможностью создания гребня, а уплотнитель установлен с возможностью уплотнения гребня. В задней части автоматического посадочного устройства на раме установлены опорные колеса. В передней части автоматического посадочного устройства установлен блок аккумуляторов и солнечная панель. В средней части на раме под бункером установлен управляющий контроллер. В верхней части между солнечной панелью и бункером установлено принимающее устройство, а БПЛА оснащен камерой и передающим устройством. Обеспечивается полная автоматизация технологического процесса посадки семенного материала картофеля. 6 з.п. ф-лы, 5 ил.
1. Автоматический комплекс для посадки картофеля, состоящий из автоматического посадочного устройства и БПЛА, характеризующийся тем, что автоматическое посадочное устройство содержит раму, шасси, опорные колеса, бункер, привод, верхний технологический уровень, нижний технологический уровень, при этом рама установлена на шасси, на раме закреплены бункер, нижний и верхний технологические уровни; верхний технологический уровень состоит из механизма подъема бункера и посадочного модуля с приводом рабочего вала, нижний технологический уровень состоит из двух отвалов и уплотнителя; передний отвал установлен с возможностью создания борозды, задний отвал установлен с возможностью создания гребня, а уплотнитель установлен с возможностью уплотнения гребня; в задней части автоматического посадочного устройства на раме установлены опорные колеса; в передней части автоматического посадочного устройства установлен блок аккумуляторов и солнечная панель, в средней части на раме под бункером установлен управляющий контроллер, в верхней части между солнечной панелью и бункером установлено принимающее устройство, а БПЛА оснащен камерой и передающим устройством.
2. Автоматический комплекс для посадки картофеля по п. 1, отличающийся тем, что в качестве БПЛА используется квадрокоптер.
3. Автоматический комплекс для посадки картофеля по п. 1, отличающийся тем, что автоматическое посадочное устройство оснащено блоком аккумуляторов с возможностью осуществлять питание приводных механизмов автоматического посадочного устройства.
4. Автоматический комплекс для посадки картофеля по п. 1, отличающийся тем, что солнечная панель автоматического посадочного устройства установлена с возможностью осуществления подзарядки аккумуляторов автоматического посадочного устройства для увеличения времени работы блока аккумуляторов.
5. Автоматический комплекс для посадки картофеля по п. 1, отличающийся тем, что контроллер автоматического посадочного устройства установлен с возможностью управления движением и работой верхнего и нижнего технологических уровней за счет его программирования.
6. Автоматический комплекс для посадки картофеля по п. 1, отличающийся тем, что контроллер автоматического посадочного устройства оснащен программным обеспечением с возможностью управления технологическим процессом за счет алгоритма программы.
7. Автоматический комплекс для посадки картофеля по п. 1, отличающийся тем, что рабочие органы нижнего технологического уровня автоматического посадочного устройства установлены с возможностью замены.
| CN 211064126 U, 24.07.2020 | |||
| САЖАЛКА КАРТОФЕЛЯ | 1996 |
|
RU2110169C1 |
| Приспособление для притирки двойных клапанов разного диаметра | 1930 |
|
SU19480A1 |
| KR 19990047604 A, 05.07.1999. | |||

