Изобретение относится к области беспилотных авиационных устройств, использующих технологию вертикального взлета и посадки, предназначенных для проведения научных исследований, доставки грузов, аэрофотографирования и видеонаблюдения с возможностью передачи информации, получаемой бортовыми датчиками, на станцию управления в режиме реального времени.
В настоящее время широкое распространение получили беспилотные авиационные устройства вертикального взлета и посадки мультироторного типа. Наибольшее распространение получили модели с четырьмя несущими винтами - квадрокоптеры или дроны. Квадрокоптеры используются как в профессиональных целях - для съемки недвижимости с воздуха, аэросъемки земельного участка, художественной аэросъемки, так и в развлекательных [Описание дронов и их назначение, http://www.abros.ru/opisanie-dronov.html]. В зависимости от размеров и заложенных программ квадрокоптеры имеют разное назначение. Отсюда и различные варианты их применения. Наиболее крупные и серьезные модели используются в армии - они снабжены фиксированными крыльями и требуют коротких взлетно-посадочных полос.Есть агрегаты, которые применяют для географической съемки местности, борьбы с браконьерством и в метеорологических целях. Квадрокоптеры меньших размеров используют технологию вертикального взлета и посадки. А миниатюрные модели запускаются с ладони [16 УНИКАЛЬНЫХ СПОСОБОВ ПРИМЕНЕНИЯ КВАДРОКОПТЕРОВ, https://www.moyo.ua/news/16_unikalnyh_sposobov_primeneniya_kvadrokopterov.html]. Профессиональные квадрокоптеры могут достигать взлетной массы от нескольких килограмм до десятков килограмм и размеров (без учета винтов) более 1-1,5 метра. Такие габариты и масса предъявляют повышенные требования к прочности конструкции квадрокоптера. Важнейшей задачей при проектировании такого рода аппаратов является разработка надежной и прочной конструкции, способной выдерживать переменные нагрузки, как рассмотрено, например, в статье [Ермаченков Д.И., Фазли Т.Г.К., Петренко Е.О. Разработка конструкции рамы квадрокоптера для удаленного мониторинга объектов // Интернет-журнал, «НАУКОВЕДЕНИЕ» ТОМ 8, №6 (2016). https://naukovedenie.ru/PDF/45TVN616.pdf]. На конструкцию квадрокоптера наложены некоторые ограничения. В частности, рама должна обладать достаточной прочностью при сравнительно небольшом весе.
Вместе с тем, относительно небольшое время полета квадрокоптеров по причине ограниченной емкости аккумуляторной батареи, как правило не более одного часа, заставляет осуществлять запуск беспилотных летательных аппаратов (БПЛА) в непосредственной близости от района выполнения поставленной задачи [Складной квадрокоптер. Патент на изобретение №2665123, МПК: В64С 27/08 (2006.01). Опубликовано 28.08.2018, Бюл. №25].
Размер и емкость аккумуляторов является сейчас одним из наиболее проблемных факторов развития беспилотных авиационных устройств вертикального взлета и посадки. Аккумулятор - одна из важнейших частей квадрокоптера [Часть 3. Все об аккумуляторах для квадрокоптеров. http://www.customelectronics.ru/chast-3-vse-ob-akkumulyatorah-dlya-kvadrokopterov/], двигатели которого в зависимости от размера могут потреблять значительные токи. Одним из основных требований к аккумуляторам является высокая токоотдача. И наилучшими характеристиками с этой точки зрения обладают литий-полимерные аккумуляторы. При выборе аккумуляторов следует учитывать их емкость, количество ячеек и максимальный разрядный ток. Емкость (в амперах) напрямую влияет на продолжительность полета, но чем больше емкость, тем больше масса. Так же положительные факторы - LiPo-аккумуляторы обладают низким саморазрядом, отсутствие эффекта памяти, большой диапазон рабочих температур и малый перепад напряжения по мере разряда. К недостаткам можно отнести не самую высокую плотность заряда, малое количество рабочих циклов и пожароопасность.
В настоящее время ведутся работы по повышению энергомассовых характеристик источников питания для БПЛА [Применение воздушно-алюминиевых химических источников тока на малоразмерных летательных аппаратах с воздушными винтами / Н.С. Окорокова, К.В. Пушкин, С.Д. Севрук и др. // Труды XLII академических чтений по космонавтике. Королевские чтения. Москва 23-26 января 2018 г. М.: МГТУ им. Н.Э. Баумана, 2018, с. 63] что позволит не менее, чем в 2 раза повысить энергомассовые характеристики и, не менее, чем в 2 раза увеличить время активного полета по сравнению с существующими аналогами, использующими исключительно литий-ионные (полимерные) батареи.
Рассматривается и другой путь электроснабжения летательных аппаратов с помощью беспроводной системы передачи энергии на основе лазерных установок с длиной волны от 0,5 до 10 мкм [Луна - шаг к технологиям освоения Солнечной системы/ под научной редакцией В.П. Легостаева и В.А. Лопоты. - М.: РКК «Энергия», 2011. с. 531-543]. При этом электромагнитная энергия лазерного пучка может передаваться как с Земли, так и с космического или воздушного объекта [В.И. Кишко, В.Ф. Матюхин. Принципы построения адаптивных ретрансляторов для стратосферных систем передачи энергии // Автометрия. 2012. Т. 48, №2. с. 59-66.]. Лазерное излучение может быть эффективно преобразовано в электроэнергию с помощью фотоэлектрических преобразователей (ФЭП) на основе полупроводниковых гетероструктур, размещаемых на приемниках-преобразователях, выполненных в виде пространственных форм на основе цилиндров, многогранников и их комбинаций, лопастей, пространственно расположенных относительно корпуса летательного аппарата [Г. Раушенбах. Справочник по проектированию солнечных батарей. М.: Энергоатомиздат, 1983, с. 79]. Однако токосъем с таких приемников изменяется в зависимости от угла падения электромагнитных лучей, а значит и освещенности отдельных фрагментов, взаимного затенения частей конструкции приемника-преобразователя. В техническом решении [Космический приемник-преобразователь лазерного излучения. Патент на изобретение №2566370, МПК: G01J 5/58 (2006.01). Опубликовано 27.10.2015. Бюл. №30] рассмотрена конфигурация всенаправленного приемника-преобразователя электромагнитной энергии лазера, позволяющая направлять луч лазера на приемник-преобразователь практически с любого направления и практически снять зависимость выходной электрической мощности приемника-преобразователя от угла падения на него лазерного пучка. А в техническом решении [Всенаправленный приемник-преобразователь лазерного излучения. Патент на изобретение №2630190, МПК: H01L 31/04 (2014.01). Опубликовано 05.09.2017. Бюл. №25] применен в конструкции приемника-преобразователя пассивный маркер, выполненный в виде всенаправленного отражателя, для лазерной локации всенаправленного приемника-преобразователя, что облегчает работу системы поиска, слежения и наведения (ПСН) луча лазера на летательный аппарат.
Известны многочисленные примеры конструкций квадрокоптеров и принципов их работы.
Так в материале [Как устроен дрон? https://iot.ru/gadzhety/kak-ustroen-dron] приведены базовые составляющие квадрокоптера, его внутреннее устройство и принципы функционирования. В общем виде в каждом дроне можно выделить следующие части: двигатели, регуляторы оборотов, пропеллеры, полетный контроллер, рама. В частности, основой квадрокоптера является рама, к которой прикрепляются все составляющие его элементы. Она должна быть ударопрочной, легкой и долговечной. Для изготовления рамы обычно используются полимеры или прочные, но легкие сплавы. Помимо этого, активно применяется карбон, стекловолокно и другие материалы, которые смогут обеспечить максимальную жесткость конструкции. В основном рама состоит из многих деталей (реже цельной), что позволяет добиться большей маневренности аппарата и легкости в управлении. Также в ней имеются отверстия, через которые прокладывается электропроводка. Она соединяет пролетный контроллер («мозг» дрона) со всеми остальными частями квадрокоптера. Еще одним важным элементом квадрокоптера является аккумуляторная батарея. От ее емкости (выраженной в миллиампер на час) зависит максимальная высота, на которую квадрокоптер может подняться, а также дальность и время полета.
В материале [Устройство дрона: обзор для новичков, https://blog.4vision.ru/novichkam/ustrojstvo-drona-obzor-dlja-novichkov.html] рассмотрена конструкция дрона на примере модели DJI Inspire 1, включающая, помимо несущего корпуса с силовой рамой, также: пропеллеры - стандартные и толкающие, изготовленные из пластика или композитных материалов; бесколлекторные двигатели, которые считаются более эффективными с точки зрения производительности и эксплуатации по сравнению с коллекторными двигателями; посадочное шасси, представляющее собой что-то вроде ножек, установленных под двигателями на концах "рук" рамы; электронный регулятор скорости (ESC), расположенный в "руках" ближе к двигателям и представляющий электрическую цепь, которая призвана контролировать скоростной режим квадрокоптера; полетный контроллер, выполняющий роль материнской платы или даже бортового компьютера, отвечает за передачу всех команд, которые пилот передает на борт квадрокоптера; приемник, отвечающий за прием радиосигналов, посылаемых квадрокоптеру через контроллер; передатчик, отвечающий за передачу радиосигналов от контроллера к квадрокоптеру для выдачи команд о направлении полета и других, связанных с этим параметров; аккумуляторная батарея, являющаяся одной из основных частей дрона, без которой невозможно запустить квадрокоптер и выполнить все поставленные полетные задачи.
В публикации [Как работает дрон - конструкция беспилотного аппарата. https://www.yandex.ru/turbo?text=https%3A%2F%2Fzetsila.ru% 2F%25D0%25BA%25D0%25B0%25D0%25BA-] приведены характерная конструкция дрона и принципы его функционирования. Система беспилотного воздушного транспорта содержит две основы: механику беспилотного летательного аппарата и систему управления. Носовая часть дрона - это, как правило, область корпуса, где установлены датчики навигационной системы. Остальная корпусная часть предназначена для размещения механики, электроники, электрооборудования. Система полета любого дрона действует благодаря устройству, которое именуется как радар позиционирования и возвращения домой. Большинство современных беспилотников наделяются двумя глобальными навигационными спутниковыми системами (ГНСС). Традиционно в конструкциях современных дронов задействованы системы GPS и ГЛОНАСС. Когда дрон запускается пользователем, система машины выполняет поиск с последующим обнаружением спутников ГНСС. Радиолокационное оборудование дрона обнаруживает сигнал и транслирует результат на дисплее пульта дистанционного управления (ДУ). В частности, показывает низкий уровень заряда батареи питания дрона на пути возвращения «домой». Технология гироскопической стабилизации является одним из тех компонентов, который «жизненно» необходим беспилотным летательным аппаратам. Гироскоп предназначен для моментальной обработки нагрузок, возникающих от внешних сил, воздействующих на конструкцию дрона. Гироскоп обеспечивает вывод необходимой навигационной информации на пульт ДУ. Контроллер полета, присутствующий в конструкции дрона - по факту представляет собой обычный компьютер, оснащенный соответствующим программным обеспечением. Таким компьютером БПЛА автоматически управляются все системы с учетом сигналов, поступающих от пульта ДУ пользователя. Кроме того, в качестве базового управления используется код так называемой «прошивки» - микросхемы памяти, действующей в паре с микроконтроллером. Встроенная в систему дистанционного управления функция компаса обеспечивает дрону точные координаты местоположения в процессе полета. Калибровкой компаса устанавливается точка возврата «домой» - место, куда дрону необходимо возвращаться в случае потери сигнала управления. Одним из важных предметов оснащения дрона является вид от первого лица (FPV - First Person View). Устройство видеокамеры, смонтированной на беспилотном летательном аппарате и предназначенной для трансляции видео в реальном времени диспетчеру ДУ. Функция и оснащение FPV позволяет БПЛА совершать перелеты на значительных высотах и на дальние расстояния, ограниченные только зарядом батареи питания. Конструкции современных дронов имеют широкодиапазонный беспроводной передатчик FPV, который устанавливается в комплекте с антеннами. В зависимости от конфигурации, приемником видеосигналов может выступать не только пульт дистанционного управления, но также компьютер, планшет, смартфон. Модуль дистанционного управления БПЛА представляет собой устройство с функциями беспроводной связи. Как правило, для организации связи используется частотный диапазон 5,8 ГГц. В процессе изготовления дрона, система дистанционного управления предварительно настраивается на полную ассоциацию с летательным аппаратом. Теоретически дальность связи самых простых систем составляет до 700 м, тогда как профессиональные конструкции устойчиво принимают сигнал на расстоянии 7 км и более.
Известен складной квадрокоптер (Патент на изобретение №2665123, МПК: В64С 27/08 (2006.01). Опубликовано 28.08.2018, Бюл. №25), содержащий корпус квадратообразной формы, состоящий из двух параллельных пластин, между которыми втулками на осях установлены внутренние концы четырех лучей - держателей двигателей с винтами, внешние концы лучей с электромоторами и винтами размещены по углам квадрата вокруг корпуса, причем скрепления лучей с корпусом выполнены с возможностью сложения лучей для удобного хранения и транспортировки. Данное техническое решение наиболее близко по конструктивному воплощению с предлагаемым изобретением и принято за прототип.
Общим основным недостатком рассмотренных выше конструкций квадрокоптеров является небольшие время и дальность полета, зависящие от емкости аккумуляторов.
Так, все аккумуляторы квадрокоптеров являются относительно тяжелыми, поэтому конструкция для их крепления должна быть достаточно прочной (еще одна причина, почему рама должна выполняться из надежных и крепких материалов). По причине малой емкости и малых размеров аккумулятора, миниатюрные дроны пока могут держаться в воздухе не более 3-5 минут. Любительские модели способны находиться в воздухе порядка 12-15 минут. Длительность полета профессиональных дронов в автономном режиме - не более получаса [Как устроен дрон? https://iot.ru/gadzhety/kak-ustroen-dron].
Задача изобретения - увеличить время, высоту и дальность активного полета квадрокоптера.
Техническим результатом изобретения является совмещение в конструкции квадрокоптера, кроме функций всенаправленного приемника-преобразователя электромагнитной энергии лазерного пучка в электроэнергию и пассивного маркера системы поиска, слежения и наведения (ПСН), так же функций силовой конструкции и тепловой, что позволяет выполнить конструктивную (силовую) и тепловую увязку трех взаимно перпендикулярных сотовых круговых панелей, составляющих его корпус, в единую тепловую сеть.
Технический результат достигается тем, что в квадрокоптер, включающем корпус, параллельные пластины, между которыми установлены внутренние концы четырех, несущих корпус, лучей, на внешних концах которых установлены электромоторы с винтами, размещенные вокруг корпуса, введены основная панель, выполненная из материала с высокой теплопроводностью и состоящая из двух круглых параллельных пластин с размещенной между ними сотовой конструкцией, и две дополнительные панели, идентичные по составу, форме и размеру основной панели при соблюдении следующего соотношения

где δ - толщина пластины;
D - диаметр пластины;
h - расстояние между внутренними поверхностями каждой пары упомянутых пластин,
при этом корпус образован тремя перпендикулярно пересекающимися упомянутыми панелями, жестко скрепленными по линии их пересечения и вписанными в сферу радиусом Rсф=0,5[D2+(h+2⋅δ)2]l/2 с центром, являющимся точкой пересечения центральных осей панелей, причем между пластинами основной панели размещен несущий каркас, в виде крестообразной рамы, получающийся в результате пересечения ее с дополнительными панелями, и образующий внутренние концы четырех, несущих корпус, лучей, причем из концов крестообразной рамы выходят упомянутые внешние концы лучей с электромоторами и винтами, при этом в результате взаимных пересечений трех пар пластин панелей образуются восемь полых трехгранных объемов, ограниченных каждый тремя перпендикулярными гранями трехгранного угла, с общей точкой - вершиной пересечения граней, где гранями являются пластины, а ребрами - линии пересечения пластин, и треугольником на сфере площадью SСФ, образуемым при пересечении упомянутых граней с поверхностью сферы, причем для каждой упомянутой панели на внешней поверхности пластины, образующей грань трехгранного объема через электроизолирующий слой установлены фотоэлементы для непосредственного преобразования энергии электромагнитного излучения лазерного пучка, направленного на геометрический центр сферы, в электрическую энергию, причем длина L1 внутренних концов лучей удовлетворяет выражению L1≤D/2, а длина L2. внешних концов лучей должна удовлетворять выражению: 
где LB - длина винта;
HB - высота винта над внешним концом луча.
Кроме того, в квадрокоптер введен полый или сплошной уголковый отражатель, установленный в зоне трехгранного угла каждого из восьми трехгранных объемов и выполненный в виде правильной треугольной пирамиды, где боковые грани являются отражающими и размещены на соответствующих гранях трехгранного объема, а основание площадью SУO является входной гранью упомянутого отражателя и каждый из них должен удовлетворять выражению SУO<<SCФ, причем конструктивно разобщенные, но объединенные функционально во всенаправленный отражатель, установленный в центральной части трех взаимно пересекающихся панелей.
А также в квадрокоптер введена цилиндрическая оболочка высотой hЦ, где hЦ=h, толщиной стенки Δ и с внешним диаметром d, установленная по торцевой поверхности каждой панели, кроме поверхностей взаимного пересечения основной панели с дополнительными панелями, причем Δ=δ и d=D, а ось цилиндрической оболочки совпадает с центральной осью соответствующей панели, где стенки цилиндрической оболочки жестко скреплены по линии их пересечения с соответствующими пластинами и выполнены из того же материала, что и пластины, а на внешней поверхности цилиндрической оболочки через электроизолирующий слой установлены фотоэлементы.
Сущность изобретения поясняется чертежами (фиг. 1-10).
На фиг. 1 приведена конструктивная схема основной панели 8, выполненной из двух круглых параллельных пластин 2, между которыми размещена сотовая конструкция 9. Для лучшего показа четырех, несущих корпус 1, лучей 4 крестообразной рамы 16, установленных между пластинами 2, одна из пластин снята. Вся электронная «начинка» квадрокоптера, размещаемая в сотовой конструкции 9 между пластинами 2 основной панели 8 на фиг. 1 не показана. На фиг. 1 обозначено: D - диаметр основной панели 8.
На фиг. 2 приведено сечение А-А основной панели 8 и двух, несущих корпус, лучей 4, каждый из которых содержит внутренний и внешний концы лучей. На фиг. 2 обозначено: L1 - длина внутренних концов 3 лучей 4; L2 - длина внешних концов 5 лучей 4.
На фиг. 3 представлен выносной элемент Б фрагмента поперечного сечения основной панели 8 в районе размещения несущего каркаса 15. На фиг. 3 обозначено: δ - толщина пластины 2; h - расстояние между внутренними поверхностями пластин 2.
На фиг. 4 приведен общий вид квадрокоптера с тремя пересекающимися панелями 8, 10, 11 и размещенным в центральной его части всенаправленным отражателем 27. В основной панели 8 установлены внутренние концы 3 четырех, несущих корпус 1, лучей 4, а внешние концы 5 лучей 4 - держателей электромоторов 6 с винтами 7 размещены вокруг корпуса 1. На фиг. 4 обозначено: LB - длина винта 7, НВ - высота винта 7 над внешним концом 5 луча 4; Rсф - радиус сферы 12, огибающей панели 8, 10, 11.
На фиг. 5 приведен общий вид взаимно пересекающихся пластин 2 панелей 8, 10, 11, образующих восемь полых трехгранных объемов 17. Штриховкой выделен один из полых трехгранных объемов 17, ограниченный тремя перпендикулярными гранями трехгранного угла, с общей точкой (вершиной) пересечения граней, где гранями являются пластины 2, а ребрами 19 - линии пересечения пластин 2, и треугольником на сфере 12. В зоне выделенного трехгранного объема 17 показан уголковый отражатель (полый 22 или сплошной 23), выполненный в виде правильной треугольной пирамиды
На фиг. 6 представлен общий вид полого уголкового отражателя 22, установленного в зоне трехгранного объема 17, выполненного в виде правильной треугольной пирамиды 24, где боковые грани 25 являются отражающими и размещены на соответствующих гранях трехгранного объема 17, а основание 26 является входной гранью уголкового отражателя 22, 23 (фрагменты пластин 2 панелей 8, 10, 11 показаны пунктирными линиями).
На фиг. 7 приведен общий вид сплошного уголкового отражателя 23, выполненного из оптического материала в виде правильной треугольной пирамиды 24 с тремя взаимно перпендикулярными боковыми отражающими гранями 25.
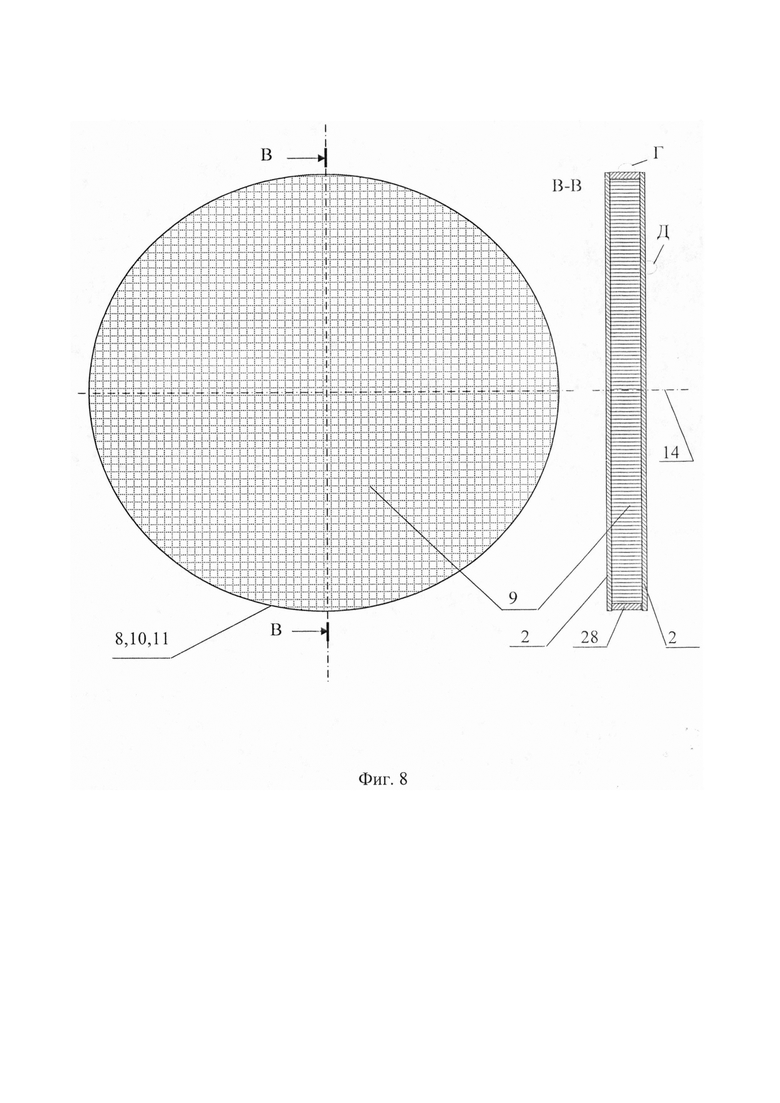
На фиг. 8 приведена одна из панелей 8, 10, 11, включающая две параллельные пластины 2, между которыми размещена сотовая конструкция 9 (без «начинки»), а по торцевой поверхности панели 8, 10, 11 установлена цилиндрическая оболочка 28.
В-В - сечение панели 8. На сечении В-В показаны выносные элементы Г и Д.
На фиг. 9 приведен выносной элемент Г фрагмента расположения фотоэлементов 29 на цилиндрической оболочке 28.
На фиг. 10 приведен выносной элемент Д фрагмента расположения фотоэлементов 29 на внешней поверхности пластин 2, образующих грани трехгранного объема 17.
На фиг. 1-10 приняты следующие обозначения:
1 - корпус;
2 - пластина;
3 - внутренний конец луча 4;
4 - луч;
5 - внешний конец луча 4;
6 - электромотор;
7 - винт;
8 - основная панель;
9 - сотовая конструкция;
10, 11 - дополнительная панель;
12 - сфера;
13 - центр сферы 12;
14 - центральная ось панели 8, 10, 11;
15 - несущий каркас основной панели 8;
16 - крестообразная рама основной панели 8;
17 - трехгранный объем;
18 - вершина; 19-ребро;
20 - электроизолирующий слой;
21 - лазерный пучок;
22 - полый уголковый отражатель;
23 - сплошной уголковый отражатель;
24 - пирамида уголкового отражателя 22, 23;
25 - боковая грань уголкового отражателя 22, 23;
26 - основание пирамиды 24, входная грань уголкового отражателя 22, 23;
27 - всенаправленный отражатель;
28 - цилиндрическая оболочка;
29 - фотоэлемент;
30 - межэлементные соединения фотоэлементов 29;
31 - полупроводниковая структура фотоэлемента 29;
32 - защитное покрытие фотоэлемента 29;
33 - лицевые контакты фотоэлемента 29;
34 - тыльные контакты фотоэлемента 29;
35 - зондирующий пучок.
Квадрокоптер включает корпус 1, параллельные пластины 2, между которыми установлены внутренние концы 3 четырех, несущих корпус 1, лучей 4, на внешних концах 5 которых установлены электромоторы 6 с винтами 7, размещенные вокруг корпуса 1. В него введены основная панель 8, выполненная из материала с высокой теплопроводностью и состоящая из двух круглых параллельных пластин 2 с размещенной между ними сотовой конструкцией 9, и две дополнительные панели 10, 11, идентичные по составу, форме и размеру основной панели 8, при соблюдении соотношения (1). При этом корпус 1 образован тремя перпендикулярно пересекающимися упомянутыми панелями 8, 10, 11, жестко скрепленными по линии их пересечения, причем панели 8, 10, 11 вписаны в сферу 12 радиусом Rсф=0,5[D2+(h+2⋅δ)2]1/2 с центром 13, являющимся точкой пересечения центральных осей 14 панелей 8, 10, 11, причем между пластинами 2 основной панели 8 размещен несущий каркас 15, в виде крестообразной рамы 16, получающийся в результате пересечения ее с дополнительными панелями 10, 11, и образующий внутренние концы 3 четырех, несущих корпус 1, лучей 4, причем из концов крестообразной рамы 16 выходят упомянутые внешние концы 5 лучей 4 с электромоторами 6 и винтами 7. При этом в результате взаимных пересечений трех пар пластин 2 панелей 8, 10, 11 образуются восемь полых трехгранных объемов 17, ограниченных каждый тремя перпендикулярными гранями трехгранного угла, с общей точкой - вершиной 18 пересечения граней, где гранями являются пластины 2, а ребрами 19 - линии пересечения пластин 2, и треугольником на сфере 12 площадью SCФ, образуемым при пересечении упомянутых граней с поверхностью сферы 12, причем для каждой упомянутой панели 8, 10, 11 на внешней поверхности пластины 2, образующей грань трехгранного объема 17 через электроизолирующий слой 20 установлены фотоэлементы 29 для непосредственного преобразования энергии электромагнитного излучения лазерного пучка 21, направленного на геометрический центр 13 сферы 12, в электрическую энергию, причем длина L1 внутренних концов 3 лучей 4 удовлетворяет выражению L1≤D/2, а длина L2 внешних концов 5 лучей 4 должна удовлетворять выражению (2). В зоне трехгранного угла каждого из восьми трехгранных объемов 17 установлен полый 22 или сплошной 23 уголковый отражатель, выполненный в виде правильной треугольной пирамиды 24, где боковые грани 25 являются отражающими и размещены на соответствующих гранях трехгранного объема 17, а основание 26 площадью SУО является входной гранью 26 упомянутого отражателя 22, 23 и каждый из них должен удовлетворять выражению SУО<<SCФ, причем конструктивно разобщенные, но объединенные функционально во всенаправленный отражатель 27, установленный в центральной части трех взаимно пересекающихся панелей 8, 10, 11. По торцевой поверхности каждой панели 8, 10, 11, кроме поверхностей взаимного пересечения основной панели 8 с дополнительными панелями 10, 11, установлена цилиндрическая оболочка 28 высотой hЦ, где hЦ=h, толщиной стенки Δ, причем Δ=δ, и с внешним диаметром d, причем d=D, а ось цилиндрической оболочки 28 совпадает с центральной осью 14 соответствующей панели, где стенки цилиндрической оболочки 28 жестко скреплены по линии их пересечения с соответствующими пластинами 2 и выполнены из того же материала, что и пластины 2 а на внешней поверхности цилиндрической оболочки 28 через электроизолирующий слой 20 установлены вышеупомянутые фотоэлементы 29. Межэлементные соединения 30 обеспечивают электрические соединения отдельных фотоэлементов 29, где происходит прямое преобразование энергии лазерного пучка 21 в полупроводниковой структуре 31, с защитным покрытием 32, в фотоэлектрический ток, который снимается с помощью лицевого контакта 33 и тыльного контакта 34. Причем в конструкции корпуса 1 для лазерной локации установлен пассивный маркер, выполненный в виде всенаправленного отражателя 27, на который падает зондирующий пучок 35.
Таким образом, корпус 1 квадрокоптера выполнен в виде всенаправленного приемника-преобразователя, представляющего собой панели 8, 10, 11 с установленными, как указано выше, фотоэлементами 29.
Квадрокоптер работает следующим образом.
Положим электромагнитное излучение от системы генерации лазерного излучения (СГЛИ) (на фигурах не показан), размещенной на наземной, воздушной или космической станции управления (на фигурах не показана), системой формирования и наведения (СФИН) (на фигурах не показана), формируется в лазерный пучок 21 с заданными параметрами и с помощью системы поиска, слежения и наведения (ПСН) (на фигурах не показана), направляется на корпус 1 квадрокоптера, выполненного в виде всенаправленного приемника-преобразователя из трех перпендикулярно пересекающихся панелей 8, 10, 11 (фиг. 4). Системой ПСН направляют ось лазерного пучка 21 в центр 13, являющийся точкой пересечения центральных осей 14 панелей 8, 10, 11, вписанных в сферу 12 радиусом Rсф=0,5[D2+(h+2⋅δ)2]1/2 (фиг. 4), причем направляют лазерный пучок 21 на корпус 1 не зависимо от его положения.
Для пассивного квадрокоптера реализуется первоначальный поиск сигнала от установленного на всенаправленном приемнике-преобразователе ответного оптического устройства, выполненного в виде всенаправленного 1 отражателя 27 на основе полых уголковых отражателей 22 или сплошных уголковых отражателей 23. А именно, часть электромагнитной энергии лазерного пучка 21, называемого зондирующим пучком 35, падает на а всенаправленный отражатель 27 и меняет направление своего ч распространения на противоположное. Таким образом, энергия отраженного; пучка в виде сигнала попадает в приемное устройство системы ПСН станции управления, что позволяет длительное время с высокой точностью поддерживать режим слежения и наведения в контуре с замкнутой обратной связью системы ПСН.
Монохроматическое электромагнитное излучение лазерного пучка 21, падает на грани полых трехгранных объемов 17, образованных в результате взаимных пересечений пластин 2 панелей 8, 10, 11, ограниченных каждый тремя перпендикулярными гранями трехгранного угла, с общей точкой (вершиной) 18 пересечения граней, где гранями являются пластины 2, а ребрами 19 - линии пересечения пластин 2, и треугольником на сфере 12 площадью SСФ, образуемым при пересечении упомянутых граней с поверхностью сферы 12 (фиг. 5, 1-3). На этих гранях через электроизолирующий слой 20 установлены фотоэлектрические преобразователи на основе полупроводниковых фотоэлементов 29 (фиг. 10). Одновременно монохроматическое электромагнитное излучение лазерного пучка 21, падает на цилиндрические оболочки 28, которые установлены по торцевой поверхности каждой панели 8, 10, 11 (фиг. 8, 5), кроме поверхностей взаимного пересечения основной панели 8 с дополнительными панелями 10, 11, и выполненные высотой hЦ, где hЦ=h, толщиной стенки Δ, где Δ=δ, и с внешним диаметром d, где d=D, причем ось цилиндрической оболочки 28 совпадает с центральной осью 14 соответствующей круговой панели, где стенки цилиндрической оболочки 35 жестко скреплены по линии их пересечения с соответствующими пластинами 2, что придает дополнительную прочность конструкции корпуса 1, и выполнены из того же материала, что и пластины 2, где, также как на гранях трехгранных объемов 17, на внешней поверхности цилиндрической оболочки 28 через электроизолирующий слой 20 установлены фотоэлектрические преобразователи на основе полупроводниковых фотоэлементов 29 (фиг. 9). Далее электромагнитное излучение, падающее на упомянутые выше фотоэлектрические преобразователи, проходит через прозрачное защитное покрытие 32 в фотоактивную область полупроводниковой структуры 31 фотоэлементов 29 (фиг. 9, 10) с межэлементными соединениями 30. Происходит процесс активного поглощения фотонов с максимальным коэффициентом поглощения электромагнитного излучения, благодаря соответствующему подбору полупроводникового материала фотоэлементов 29 для данной длины волны λ, монохроматического излучения лазера, как рассмотрено, например в техническом решении [Патент РФ №2487438, МПК: H01L 31/042 (2006.01), опубл. 10.07.2013, Бюл. №19] или в [Патент РФ №2593821, МПК: H01L 31/04 (2014.01), опубл. 10.08.2016, Бюл. №22]. Таким образом в фотоэлементах 29 происходит прямое преобразование энергии электромагнитного излучения, основанное на фотовольтаическом эффекте, в фотоэлектрический ток, который снимается с помощью лицевого контакта 33 и тыльного контакта 34. Межэлементные соединения 30 обеспечивают электрические соединения отдельных фотоэлементов 29 в параллельные и последовательные цепи для получения требуемых параметров постоянного тока, генерируемого всенаправленным приемником-преобразователем, являющимся источником электропитания квадрокоптера. И далее, через устройство преобразования (на фигурах не показано), как, например, приведено в [Устройство дрона: обзор для новичков. https://blog.4vision.ru/novichkam/ustrojstvo-drona-obzor-dlja-novichkov.html], с помощью электронного регулятора скорости (ESC) (на фигурах не показан), призванного контролировать скоростной режим беспилотника, преобразуется постоянный ток источника питания в переменный ток, который нужен электромоторам 6, приводящим в движение винты 7.
В активном полете конструкция квадрокоптера, выполненная в виде основной панели 8 (фиг. 1-3) и двух перпендикулярно пересекающих ее дополнительных панелей 10, 11, жестко скрепленных по линии их пересечения, с диаметром D и включающих каждая две параллельные пластины 2, толщиной δ и с расстоянием h между их внутренними я поверхностями, удовлетворяющих выражению (1), испытывает нагрузки возникающие от внешних сил. В основном эти нагрузки испытывает несущий каркас 15 основной панели 8, выполненный в виде крестообразной рамы 16, получающийся в результате пересечения ее с дополнительными панелями 10, 11 и образующий внутренние концы 3 четырех, несущих корпус 1, лучей 4, причем из концов крестообразной рамы 16 выходят внешние концы 5 лучей 4 с электромоторами 6 и винтами 7, размещенные вокруг корпуса 1. Причем длина L1 внутренних концов 3 лучей 4 удовлетворяет выражению L1≤D/2, а длина L2 внешних концов 7 лучей 4 должна удовлетворять выражению (2).
Часть нагрузки, воздействующей на основную панель 8, передается на пластины 2 двух дополнительных панелей 10, 11, выполняющих функцию ребер жесткости, и таким образом, разгружая несущий каркас 15, выполненный в виде крестообразной рамы 16.
В процессе летной эксплуатации квадрокоптера, одновременно с преобразованием электромагнитной энергии лазерного пучка 21 в электроэнергию, идет также процесс теплообмена в конструктивных элементах всенаправленного приемника-преобразователя, образующего корпус 1 из трех перпендикулярно пересекающихся панелей 8, 10, 11.
Одна часть энергии лазерного пучка 21, не преобразованная в электроэнергию во всенаправленном приемнике-преобразователе, теплоотдачей с лицевой поверхности фотоэлементов 29, уходит в окружающее корпус 1 квадрокоптера воздушное пространство.
Другая часть не преобразованной энергии, по причине неполного использования падающего на фотоэлементы 29 потока электромагнитного излучения лазерного пучка 21 в полупроводниковой структуре 31, в виде тепловой энергии через тыльный контакт 34 и электроизолирующий слой 20 поступает на внешнюю поверхность пластины 2 и далее на параллельную ей пластину, благодаря высокой теплопроводности пластин 2 и размещенной между ними сотовой конструкции 9. Благодаря жестким конструктивным связям между панелями 8, 10, 11, а также между ними и цилиндрической оболочкой 28, при высокой теплопроводности этих конструктивных элементов не преобразованное тепло эффективно рассеивается по поверхностям пластин 2 каждой панели 8, 10, 11. Таким образом, обеспечивается передача теплоты на затененные поверхности корпуса 1 от поверхностей, на которые падает электромагнитная энергия лазерного пучка 21. В результате обеспечивается более равномерное распределение температуры по пластинам 2, что способствует более эффективному теплообмену с окружающей средой. С другой стороны, более равные температурные условия работы фотоэлементов 29 повышают надежность работы всенаправленного приемника-преобразователя в целом. Кроме того, равномерное распределение температуры в тонкостенных элементах, из которых состоит конструкция корпуса 1 квадрокоптера, снижает локальные термические напряжения обусловленные падением на отдельные элементы конструкции концентрированной электромагнитной энергии лазерного пучка 21, что повышает работоспособность квадрокоптера как летательного аппарата.
Одновременно, как отмечалось выше, часть электромагнитной энергии лазерного пучка 21 используется в качестве зондирующего пучка 35 лазерной локационной системы (ЛЛС). Электромагнитная энергия зондирующего пучка 35 падает на полые уголковые отражатели 22 или сплошные уголковые отражатели 23, установленные в зоне трехгранного угла каждого из восьми трехгранных объемов 17 и выполненные в виде правильной треугольной пирамиды 24, где боковые грани 25 являются отражающими и размещены на соответствующих гранях трехгранного угла трехгранного объема 17, а основание 26 площадью SУО является входной гранью 26 уголковых отражателей 22, 23 и каждый из них должен удовлетворять выражению SУО<<SCФ. Причем конструктивно разобщенные, но объединенные функционально во всенаправленный отражатель 27, установленный в центральной части трех взаимно пересекающихся панелей 8, 10, 11. Причем, в зависимости от взаимного расположения панелей 8, 10, 11 относительно направления зондирующего пучка 35 будет меняться видимая для зондирующего пучка 35 площадь лобовой поверхности всенаправленного отражателя 27. Как видно из фиг. 4 и 5, в зависимости от направления оси зондирующего пучка 35, относительно положения пересекающихся панелей 8, 10, 11, возможно освещение от одного до четырех входных граней 26 всенаправленного отражателя 27. Так, например, при совпадении оси зондирующего пучка 35 с биссектрисой трехгранного угла трехгранного объема 17, освещаться будет только входная грань 26 одного уголкового отражателя - полого уголкового отражатели 22 или сплошного уголкового отражателя 23, а при совпадении оси зондирующего пучка 35 с центральной осью 14 (фиг. 4) одной из панелей 8, 10, 11 будут освещаться четыре входные грани 26 для четырех уголковых отражателей - полых уголковых отражателей 22 или сплошных уголковых отражателей 23. При этом возможны, с учетом затенения входных граней 26 панелями 8, 10, 11, промежуточные ситуации.
В случае выполнения всенаправленного отражателя 27 из восьми полых уголковых отражателей 22 (фиг. 6), фотоны зондирующего пучка 35 проходят через входную грань 26, в общем случае от одного до четырех полых уголковых отражателей 22, и падают на отражающие боковые грани 25 пирамиды 24, выполненные зеркальными. Зеркальное отражение от каждого из трех отражающих боковых граней 25 приводит к перевороту, соответствующей составляющей вектора скорости фотона в направлении строго противоположном первоначальному, т.е. в направлении приемного устройства системы ПСН.
В случае всенаправленного отражателя 27, состоящего из восьми сплошных уголковых отражателей 23 (фиг. 7), выполненных из оптического материала, фотоны зондирующего пучка 35 падают на входную грань 26 (в общем случае на входные грани 26 от одного до четырех сплошных уголковых отражателей 23), как правило, с нанесенной на ее поверхность пленкой антиотражающего покрытия (на фигурах не показана), где они преломляются (первое преломление) и переходят из оптически менее плотной среды (воздух) в оптически более плотную (антиотражающее покрытие). Далее, на границе двух сред (антиотражающее покрытие оптический материал) лазерный луч зондирующего пучка 35 испытывает второе преломление и далее электромагнитные волны проходят оптический материал и падают на отражающие боковые грани 25, что приводит к перевороту соответствующей составляющей вектора скорости фотона в направлении строго противоположном первоначальному. Далее лазерный луч, претерпевая в обратном направлении два преломления, как рассмотрено выше, выходит из сплошного уголкового отражателя 23 под тем же углом, под которым он ранее падал на входную грань 26, в направлении приемного устройства системы ПСН.
Приведем расчетный пример проектирования квадрокоптера.
Корпус 1 квадрокоптера формируем в виде основной панели 8, состоящей из двух круглых параллельных пластин 2 диаметром D и толщиной 5 с размещенной между ними сотовой конструкцией 9, и двух дополнительных панелей 10, 11, идентичных по составу, форме и размеру основной панели 8. Три перпендикулярно пересекающиеся упомянутые панели 8, 10, 11, жестко скрепленные по линии их пересечения, вписаны в сферу 12 с центром 13, являющимся точкой пересечения центральных осей 14 панелей 8, 10, 11. Взаимно пересекающиеся панели 8, 10, 11, с цилиндрическими оболочками 28, образуют корпус 1 в виде всенаправленного приемника-преобразователя лазерного излучения в электроэнергию и где на приемных поверхностях корпуса 1 установлены фотоэлементы 29.
Для данного примера примем круговой лазерный пучок 21, т.е. пространственное распределение мощности лазерного пучка 21 имеет круговую симметрию. Ось лазерного пучка 21 направляют в центр 13 сферы 12. При этом испускаются когерентные электромагнитные волны оптического диапазона, положим длиной λ=0,8 мкм [Физический энциклопедический словарь. Москва, «Советская энциклопедия», 1983. С. 338]. Примем, что лазерный пучок 21 падает на корпус 1, т.е. на приемные поверхности приемника-преобразователя, непрерывно со средней плотностью мощности Е=18⋅103 Вт/м2, отнесенной к поперечному сечению лазерного пучка 21 диаметром, примерно равным диаметру D панелей 8, 10, 11. В первом приближении примем зависимость относительной выходной электрической мощности (Р/Р0), снимаемой с приемника-преобразователя, от направления оси лазерного пучка 21, падающего на приемник-преобразователь, аналогичной зависимости Р/Р0 для солнечной батареи шарообразной формы, как наиболее близкой но геометрии, и приведенной в [Г. Раушенбах. Справочник по проектированию солнечных батарей. М.: Энергоатомиздат, 1983. С. 79], где Р/Р0=0,9-1,0. Здесь Р0 - максимальная выходная электрическая мощность снимаемая с всенаправленного приемника-преобразователя. Используя для Р уравнение из [Г. Раушенбах. Справочник по проектированию солнечных батарей. М: Энергоатомиздат, 1983. С. 73], запишем в общем виде для выходной электрической мощности всенаправленного приемника-преобразователя соотношение

где Е - средняя плотность мощности лазерного пучка 21 падающего на приемник-преобразователь, Вт/м2;
η - КПД преобразования приемника-преобразователя, отн. ед.;
F - суммарный фактор, учитывающий возможную деградацию ее параметров и особенности приемника-преобразователя, в том числе снижение полезной площади панели 8, 10, 11 за счет использования всенаправленного отражателя 27 используемого системой ПСН;
i - номер панели 8, 10, 11;
(SПП)i - площадь приемной поверхности i-ой панели 8, 10, 11, на которую падает лазерный пучок 21;
Гi - угол между осью лазерного пучка 21 и нормалью к плоскости i-ой панели 8, 10, 11.
В рассматриваемом приемнике-преобразователе площадь приемной поверхности Snn образуют грани (или части граней) трехгранного объема 17 и части площади цилиндрической оболочки 28 панели 8, 10, 11, поскольку лазерный пучок 21 падает, как правило, на часть площади пластин 2 трехгранного объема 17, а другая часть этой пластины 2 загорожена (затенена) соседними панелями 8, 10,11 и поэтому остается в тени.
Базовыми материалами для производства фотоэлементов 29 с внутренним фотоэффектом [В.С. Авдуевский, Г.Р. Успенский. Космическая индустрия. Москва. Машиностроение, 1989 г. С. 138] являются полупроводниковые структуры 31 на основе соединений элементов III и V (АIIIВV), II и VI групп (AIIBVI) или на основе полупроводников IV группы периодической системы элементов. Для расчетного примера в качестве фотоэлементов 29, покрывающих через электроизолирующий слой 20 внешние поверхности цилиндрической оболочки 28 и пластины 2, образующие грани трехгранных объемов 17, панелей 8, 10, 11, используем тонкопленочные однопереходные фотоэлектрические элементы (ФЭП) на основе AlGaAs/GaAs [Ж.И. Алферов, В.М. Андреев, В.Д. Румянцев. Тенденции и перспективы развития солнечной фотоэнергетики // Физика и техника полупроводников, 2004, том 38, вып. 8, с. 937-948], разработанные в Физико-техническом институте им. А.Ф. Иоффе РАН и позволяющие сохранить высокий КПД при уменьшении толщины структуры ФЭП до величины менее 10 мкм [В.И. Кишко, В. Ф. Матюхин. Принципы построения адаптивных ретрансляторов для стратосферных систем передачи энергии // Автометрия. 2012. .Т. 48, №2. с. 59-66.]. Выбранный в качестве полупроводниковой структуры 31 материал на основе GaAs имеет наивысший показатель поглощения, для выбранной в расчетном примере длины волны лазера λ=0,8 мкм, в сравнении с другими полупроводниками [В.А. Грилихес, П.П. Орлов, Л.Б. Попов. Солнечная энергия и космические полеты. М.: Наука, 1984, с. 93]. Защитное покрытие 32 фотоэлементов 29 предположим выполнено из ZnS, как предложено, например, в техническом решении [Фотоэлемент приемника-преобразователя лазерного излучения. Патент на изобретение №2593821, МПК: H01L 31/04 (2014.01). Опубликовано 10.08.2016. Бюл. №22]. Для каждой панели 8, 10, 11 через электроизолирующий слой 20 устанавливаем фотоэлементы 29 с полосковыми лицевыми контактами 33 и сплошными тыльными контактами 34, выполненными из материала на основе Au, и коммутируем их в последовательно-параллельные цепи. В расчетном примере примем КПД фотоэлементов 29 с внутренним фотоэффектом η=0,5, а суммарный фактор, учитывающий потери в коммутации и дополнительную тепловую нагрузку на всенаправленный приемник-преобразователь, испытываемую корпусом 1 от солнечного излучения, в первом приближении примем F=0,9. Считаем, что максимум снимаемой с всенаправленного приемника-преобразователя выходной электрической мощности (Р0) соответствует направлению оси лазерного пучка совпадающей с центральной осью 14 какой-либо панели 8, 10, 11. Примем в данном примере величину максимальной выходной электрической мощности всенаправленного приемника-преобразователя Р0=4⋅103 Вт. Решая уравнение (3) относительно SПП получаем площадь приемной плоскости, в данном случае она практически совпадает с площадью панели (S), с одной ее стороны, т.е.
SПП = Р0/(Е⋅cosГ⋅η F) = 4⋅103/(18⋅103⋅cos 0⋅0,5⋅0,9)=0,5 м2.
Откуда определим размеры приемника-преобразователя, т.е. диаметр пластин 2 панелей 8, 10, 11 D = 2⋅(S/π)0,5 = 2⋅(0,5/π)0 5 ≈ 0,8 м = 800 мм. Каждая панель 8, 10, 11 включает по две параллельные пластины 2, толщиной 5 (принимаем 8=1 мм) и с расстоянием h (принимаем h=80 мм) между их внутренними поверхностями, что удовлетворяет условию δ<<h<<D. Таким образом, корпус 1 квадрокоптера выполняем как можно более легким из тонкостенных оболочек, что характерно для летательных аппаратов. Причем пластины 2 и сотовую конструкцию 9 (фиг. 8) выполняют из материала с высокой теплопроводностью, в качестве которого выбираем алюминий или сплавы на его основе, поскольку этот металл обладает достаточной прочностью, низкой удельной массой и высокой теплопроводностью [Физические величины. Справочник под ред. И.С. Григорьева, Е.З. Мейлихова. М.: Энергоатомиздат, 1991. с. 52-56, 99, 340], что очень важно при проектировании всенаправленного приемника-преобразователя энергии лазерного пучка 21 в электроэнергию для квадрокоптера. Выполняем каждую панель 8, 10, 11 в виде сотовой конструкции 9 из алюминиевой фольги толщиной δф=0,1 мм (фиг. 1, 8). Причем панели 8, 10, 11 размещают так, чтобы они были вписаны в сферу 12 радиусом Rсф = 0,5[D2+(h+2⋅δ)2]1,/2 = 0,5[64⋅104+(80+2⋅0,1)2]1,/2 = 4,02⋅102 мм с центром 13, являющимся точкой пересечения центральных осей 14 панелей 8, 10, 11. Всю электронную «начинку» (на фигуре не показана) квадрокоптера размещаем в сотовой конструкции 9 между пластинами 2 основной панели 8. Между пластинами 2 основной панели 8 также размещаем несущий каркас 15 в виде крестообразной рамы 16, получающийся в результате пересечения ее с дополнительными панелями 10, 11, и образующий внутренние концы 3 четырех несущих корпус 1 лучей 4, причем из концов крестообразной рамы 16 выходят внешние концы 5 лучей 4 с электромоторами 6 и винтами 7, размещенные вокруг корпуса 1, как приведено на фиг. 1-4. Причем длина L1 внутренних концов 3 лучей 4 принимаем равной L1=400 мм, что удовлетворяет выражению L1≤D/2. Принимаем длину винта 7 LB=300 мм, высоту винта 7 над внешним концом 5 луча 4 HB=150 мм, а длину внешних концов 5 лучей 4 принимаем L2=150 мм, что удовлетворяет выражению (2), т.е.
L2>LB/2-D/2+{0,25⋅D2-[HB-(h/2+δ)]2}1/2 = 300/2-800/2+{0,25⋅64⋅104-[150-(80/2+1)]2}1/2 =130 мм.
В зоне трехгранного угла каждого из восьми трехгранных объемов 17 устанавливают полый уголковый отражатель 22 или сплошной уголковый отражатель 23, выполненные в виде правильной треугольной пирамиды 24, где боковые грани 25 являются отражающими и размещены на соответствующих гранях трехгранного объема 17. Примем величину бокового ребра b пирамиды 24 равной b=30 мм, откуда определим площадь SУО основания 26 пирамиды 24, являющегося входной гранью 26 полого уголкового отражателя 22 или сплошного уголкового отражателя 23, по формуле [Бронштейн И.Н., Семендяев К.А. Справочник по математике для инженеров и учащихся втузов. Изд. переработанное. Под редакцией Г. Гроше и В. Циглера. Совместное издание. Издательство «Тойбнер» Лейпциг, Москва «Наука», Гл. ред. физ.-мат. лит., 1981. с. 217]. Откуда SУО=b2⋅sin60°/2 = 302⋅sin60°/2 = 3,9⋅102 мм2 = 3,9⋅10-4 м2. Для сравнения определим площадь SСФ треугольника на сфере 12 одного из восьми полых трехгранных объемов 17, зная площадь сферы 12 S и площади сферической поверхности трех шаровых слоев ∑SСЛ, образованных при пересечении пластин 2 панелей 8, 10, 11 со сферой 12, по зависимостям, приведенным в [Бронштейн И.Н., Семендяев К.А. Справочник по математике для инженеров и учащихся втузов. Изд. переработанное. Под редакцией Г. Гроше и В. Циглера. Совместное издание. Издательство «Тойбнер» Лейпциг, Москва «Наука», Гл. ред. физ.-мат. лит., 1981. с. 224], по формуле
Таким образом, сравнивая полученные значения площадей SУО и SСФ, видно, что площадь входной грани 26 полого уголкового отражателя 22 или сплошного уголкового отражателя 23 составляет 0,134% от площади SСФ треугольника на сфере 12 полого трехгранного объема 17, что удовлетворяет требуемому условию SУО<<SCФ.
Положим, что ось зондирующего пучка 35 совпадает с биссектрисой трехгранного угла трехгранного объема 17, т.е. освещаться будет только входная грань 26 одного уголкового отражателя - полого уголкового отражатели 22 или сплошного уголкового отражателя 23. Откуда, в первом приближении, определим мощность зондирующего пучка 35, падающего на всенаправленный отражатель 27, по выражению W = Е⋅SУО = 18⋅103⋅3,9⋅10-4 = 7 Вт. Для данного примера выполняем всенаправленный отражатель 27 состоящим из восьми полых уголковых отражателей 22. Причем боковые грани 25 выполняем зеркальными с отражающим покрытием из серебра, что вызвано в первую очередь максимально высоким спектральным коэффициентом отражения пленок серебра ρλ. Для принятой в примере длины волны λ=0,8 мкм коэффициент отражения пленки серебра, которую используем в качестве покрытия ρλ=0,964 [Физические величины. Справочник под ред. И.С. Григорьева, Е.З. Мейлихова. Москва: Энергоатомиздат, 1991. С. 783].
Вывод соотношения (2) вытекает из рассмотрения геометрии элементов квадрокоптера, приведенных на фиг. 1, 2, 4, достаточно очевиден и определяется недопущением в полете касания винтами 7 панелей 8, 10, 11.
В дополнение отметим положительные моменты в предлагаемой конструкции квадрокоптера:
- универсальность конструкции - корпус состоит из трех одинаковых по конструкции панелей, выполненных из материала с высокой теплопроводностью и состоящих каждая из двух круглых параллельных пластин с размещенной между ними сотовой конструкцией;
- дополнительные панели фактически выполняют несколько функций: развивают поверхность размещения ФЭП, образуют всенаправленный приемник-преобразователь, обеспечивают жесткость основной панели и четырех, несущих корпус, лучей;
- использованы торцевые поверхности панелей, введя в конструкцию цилиндрические оболочки, на которые дополнительно размещены ФЭП и которые придают всей конструкции квадрокоптера дополнительную жесткость;
- в отличие от летательных аппаратов, использующих в конструкции солнечные преобразователи, предлагаемая конструкция может летать как в дневное, так и в ночное время;
- высокотеплопроводная сотовая конструкция панелей позволяет эффективно перераспределять тепло между пластинами каждой панели, что приводит к выравниванию температуры корпуса квадрокоптера;
- конструкция выполнена на основе тонкостенных оболочек, это позволяет получать минимальные удельные массы конструкции, что является необходимым условием летательных аппаратов, работающих в воздушном пространстве;
- эффективно использовать предлагаемую конструкцию квадрокоптера, где не требуют высоких скоростей полета, но требуют больших времен зависания над объектом исследования.
| название | год | авторы | номер документа |
|---|---|---|---|
| Всенаправленный приёмник-преобразователь лазерного излучения (2 варианта) | 2016 |
|
RU2630190C1 |
| КОСМИЧЕСКИЙ ПРИЕМНИК-ПРЕОБРАЗОВАТЕЛЬ ЛАЗЕРНОГО ИЗЛУЧЕНИЯ | 2013 |
|
RU2566370C2 |
| Беспилотный летательный аппарат вертолетного типа | 2022 |
|
RU2792460C1 |
| ИМПУЛЬСНО-ПЕРИОДИЧЕСКИЙ ЭЛЕКТРОРАЗРЯДНЫЙ ЛАЗЕР ЗАМКНУТОГО ЦИКЛА (ВАРИАНТЫ) | 2008 |
|
RU2405233C2 |
| БЕСПИЛОТНОЕ ВОЗДУШНОЕ СУДНО МУЛЬТИРОТОРНОГО ТИПА (БВС) ДЛЯ ТРАНСПОРТИРОВКИ МАЛОГАБАРИТНЫХ ГРУЗОВ | 2023 |
|
RU2823830C1 |
| Устройство для ориентации космического аппарата по направлению лазерного луча | 2019 |
|
RU2717385C1 |
| Способ всенаправленной регистрации изображения в оптическом диапазоне | 2018 |
|
RU2684947C1 |
| УСТРОЙСТВО ИМИТАЦИИ РАДИОЛОКАЦИОННОГО СИГНАЛА | 1993 |
|
RU2072596C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ ОБЪЕКТА С ПОМОЩЬЮ ОПТИКО-ЭЛЕКТРОННОЙ СИСТЕМЫ И УГОЛКОВОГО ОТРАЖАТЕЛЯ | 2014 |
|
RU2556282C1 |
| Приёмник-преобразователь лазерного излучения | 2016 |
|
RU2639738C2 |









Изобретение относится к области авиации, в частности к конструкции беспилотных летательных аппаратов вертикального взлета и посадки. Квадрокоптер включает основную панель, выполненную из материала с высокой теплопроводностью и состоящую из двух круглых параллельных пластин с размещенной между ними сотовой конструкцией, и две дополнительные панели, идентичные по составу, форме и размеру основной панели. При этом корпус образован тремя перпендикулярно пересекающимися упомянутыми панелями, жестко скрепленными по линии их пересечения, причем панели вписаны в сферу с центром в точке пересечения центральных осей панелей. Между пластинами основной панели размещен несущий каркас в виде крестообразной рамы, из концов которой выходят внешние концы лучей с электромоторами и винтами. При пересечении трех пар пластин панелей образуются восемь полых трехгранных объемов. На внешней поверхности пластины, образующей грань трехгранного объема, через электроизолирующий слой установлены фотоэлементы. Обеспечивается совмещение функций приемника-преобразователя электромагнитной энергии лазерного пучка в электроэнергию и пассивного маркера системы поиска, слежения и наведения, тепловая увязка трех панелей, составляющих корпус, в единую тепловую сеть. 2 з.п. ф-лы, 10 ил.
1. Квадрокоптер, включающий корпус, параллельные пластины, между которыми установлены внутренние концы четырех несущих корпус лучей, на внешних концах которых установлены электромоторы с винтами, размещенные вокруг корпуса, отличающийся тем, что в него введены основная панель, выполненная из материала с высокой теплопроводностью и состоящая из двух круглых параллельных пластин с размещенной между ними сотовой конструкцией, и две дополнительные панели, идентичные по составу, форме и размеру основной панели, при соблюдении следующего соотношения δ<<h<<D, где δ - толщина пластины; D - диаметр пластины; h - расстояние между внутренними поверхностями каждой пары упомянутых пластин, при этом корпус образован тремя перпендикулярно пересекающимися упомянутыми панелями, жестко скрепленными по линии их пересечения, причем панели вписаны в сферу радиусом Rcф=0,5[D2+(h+2⋅δ)2]1/2 с центром, являющимся точкой пересечения центральных осей панелей, причем между пластинами основной панели размещен несущий каркас в виде крестообразной рамы, получающийся в результате пересечения ее с дополнительными панелями и образующий внутренние концы четырех несущих корпус лучей, причем из концов крестообразной рамы выходят упомянутые внешние концы лучей с электромоторами и винтами, при этом в результате взаимных пересечений трех пар пластин панелей образуются восемь полых трехгранных объемов, ограниченных каждый тремя перпендикулярными гранями трехгранного угла, с общей точкой - вершиной пересечения граней, где гранями являются пластины, а ребрами - линии пересечения пластин, и треугольником на сфере площадью SСФ, образуемым при пересечении упомянутых граней с поверхностью сферы, причем для каждой упомянутой панели на внешней поверхности пластины, образующей грань трехгранного объема, через электроизолирующий слой установлены фотоэлементы для непосредственного преобразования энергии электромагнитного излучения лазерного пучка, направленного на геометрический центр сферы, в электрическую энергию, причем длина L1 внутренних концов лучей удовлетворяет выражению L1≤D/2, а длина L2 внешних концов лучей должна удовлетворять выражению:
L2>LB/2-D/2+{0,25 D2-[НB-(h/2+δ)]2}1/2,
где LB - длина винта;
НB - высота винта над внешним концом луча.
2. Квадрокоптер по п. 1, отличающийся тем, что в него введен полый или сплошной уголковый отражатель, установленный в зоне трехгранного угла каждого из восьми трехгранных объемов и выполненный в виде правильной треугольной пирамиды, где боковые грани являются отражающими и размещены на соответствующих гранях трехгранного объема, а основание площадью SYO является входной гранью упомянутого отражателя и каждый из них должен удовлетворять выражению SУО<<SCФ, причем конструктивно разобщенные, но объединенные функционально во всенаправленный отражатель, установленный в центральной части трех взаимно пересекающихся панелей.
3. Квадрокоптер по п. 1, отличающийся тем, что в него введена цилиндрическая оболочка высотой hЦ, где hЦ=h, толщиной стенки Δ и с внешним диаметром d, установленная по торцевой поверхности каждой панели, кроме поверхностей взаимного пересечения основной панели с дополнительными панелями, причем Δ=δ и d=D, а ось цилиндрической оболочки совпадает с центральной осью соответствующей панели, где стенки цилиндрической оболочки жестко скреплены по линии их пересечения с соответствующими пластинами и выполнены из того же материала, что и пластины, а на внешней поверхности цилиндрической оболочки через электроизолирующий слой установлены фотоэлементы.
| СКЛАДНОЙ КВАДРОКОПТЕР | 2017 |
|
RU2665123C2 |
| АМОРТИЗАТОР-ПОДЪЕМНИК РЕГУЛИРУЕМЫЙ | 2002 |
|
RU2233393C2 |
| Способ ультразвукового контроля поверхностных и подповерхностных дефектов металлопродукции и устройство для его осуществления | 2016 |
|
RU2644438C1 |
| Всенаправленный приёмник-преобразователь лазерного излучения (2 варианта) | 2016 |
|
RU2630190C1 |

