Область техники
Изобретения относятся к методам осуществления межорбитальных маневров космических аппаратов (КА) с использованием внешних ресурсов космической среды и, конкретно, мелкодисперсного вещества, например, лунного реголита («лунной пыли», с размерами частиц ~ 1- 100 мкм).
Такого рода маневры, использующие в основном механическую энергию внешнего вещества, далее для краткости будут называться экзо-динамическими (ЭДМ).
Запасы пыли на поверхности Луны практически безграничны: толщина слоя пыли составляет 4-5 м в области лунных морей и 10-15 м в гористых районах (см. [1] А. В. Захаров и др. Лунная пыль: свойства, потенциальная опасность. Астрономический вестник, 2020, том 54, № 6, ИКИ, М., с.487).
Такого количества реголита вполне достаточно, чтобы наряду с его промышленным применением (для лунного строительства, химической переработки и иных технологий) обратиться к непосредственному использованию его механической энергии для организации космических транспортных операций.
Потенциальная энергия массы «лунной пыли» относительно поверхности Земли и околоземных орбит (от ~ 100 км до ~10 000 км) примерно соответствует кинетической энергии этой массы, движущейся в указанных областях со «второй космической» скоростью, составляющей для низких орбит около 11 км/с и, в общем случае, равной  , где Vc - скорость КА на некоторой круговой орбите.
, где Vc - скорость КА на некоторой круговой орбите.
При передаче такой естественно запасенной энергии лунного вещества некоторому КА можно получить значительное изменение скорости (ΔVc) и орбиты КА.
Для передачи КА этой энергии пылевидное вещество должно быть выведено с поверхности Луны и покинуть сферу влияния Луны, перейдя на параболическую или гиперболическую траекторию, пересекающую орбиту КА или касающуюся ее. Для этого веществу надо сообщить скорость порядка «второй космической» для Луны, которая составляет всего 2,38 км/с и сравнительно легко достигается, например, с помощью электромагнитных ускорителей (ЭМУ). Затраты энергии при этом будут на порядок меньше указанной выше потенциальной энергии лунного вещества.
Процесс передачи КА энергии и количества движения лунной пыли должен отвечать требованию ограничения действующих на КА нагрузок при его столкновении с потоком пыли, ввиду чего плотность потока должна быть достаточно мала, а его размеры (в направлении движения относительно КА) соответственно велики - чтобы с КА прореагировала масса вещества, достаточная для существенного изменения скорости КА.
Для восприятия набегающего на КА потока можно использовать некоторый экран (в том числе жаропрочный) или более сложную систему, преобразующую поток.
Предшествующий уровень техники
Использование измельченного внеземного вещества для ЭДМ различных КА описано, например, в [2] А.В. Андреев. Некоторые вопросы транспортировки лунного вещества. Труды X1X Чтений К.Э. Циолковского. Секция "Проблемы ракетной и космической техники». М., ИИЕТ АН СССР, 1986. С.87-96 (там же имеется и ряд ссылок по теме).
В [2] предложено образование в окрестности гиперболической траектории движения из области орбиты Луны протяженного пылевого «хвоста» (по аналогии с кометным), который формируется посредством инициирующего устройства (ИУ), высвобождающего пыль из контейнера и предоставляющего ее действию солнечного давления. При подходящих начальных условиях высвобождения пыли и расположении указанной траектории относительно Земли и Солнца «хвост» ориентируется в перигее тангенциально и по всей своей длине взаимодействует с КА, передавая ему часть своего импульса.
Достоинством решения [2] является то, что не взаимодействовавшая с КА часть пылевого потока покидает сферу гравитационного влияния Земли, а потому не служит источником космического мусора. Оставшиеся после взаимодействия частицы либо сгорают в атмосфере, либо постепенно «выметаются» солнечным излучением.
Принцип изменения скорости КА, основанный на утилизации энергии лунного вещества, получил развитие в [3] А.О. Майборода. Система Satpush: использование внеземных запасов потенциальной и кинетической энергий для космических запусков. Воздушно-космическая сфера /Aerospace Sphere Journal, №2(95) 2018.
Согласно [3], на переходную траекторию, связывающую низкие окололунную и околоземную орбиты, выводится множество пар модулей с капельными генераторами и сборниками (КГС) и запасами лунной воды и реголита, из которых приготовляется суспензия. При подлете к Земле модули выстраиваются в кортеж, сквозь который пролетает КА, последовательно пересекая формируемые КГС струи суспензии («гидропушеры») и получая от взаимодействия со струями, посредством теплозащитного экрана, приращения скорости на траектории выведения.
Ускорение и дистанционная передача в требуемые области пространства гранулированного вещества с помощью электромагнитного (лазерного или радио) излучения предложены в патентах [4] RU 2086883 C1; 10.08.1997 и [5] RU 2198320 C2; 10.02.2003.
Недостатком технического решения [3] является невысокая эффективность передачи КА импульса струйных потоков, т. к. КА проходит поперек этих потоков, а не вдоль них - что требует большого числа модулей с «гидропушерами».
Решения [4]- [5] требуют искусственных источников излучения высокой мощности, что может привести к разрушению гранул и их значительной фотоэмиссионной электризации.
В качестве ближайшего аналога может быть выбрано решение [2]. Его недостатком, в частности, являются ограниченные возможности ЭДМ КА, поскольку:
- орбита КА должна лежать в плоскости эклиптики (чтобы взаимодействующий с КА «хвост» лежал в плоскости орбиты КА), причем изменение наклонения орбиты КА в результате ЭДМ не предусмотрено;
- возможно только увеличение скорости КА (когда «хвост» догоняет КА), поскольку при торможении КА (когда «хвост» движется навстречу КА) скорость соударения (ΔV) пыли с КА была бы недопустимо велика: в первом случае  а во втором случае
а во втором случае 
- имеет место значительное рассеяние пыли в поперечном направлении при длительном действии на нее солнечного давления, а также ввиду электризации пылевых частиц в космической плазме.
Ансамбль пылевых частиц, формирующих поток, далее будет называться шлейфом.
Сущность изобретения
Задачей предлагаемых изобретений является устранение указанных выше недостатков прототипа путем выбора таких орбит доставки лунной пыли в области взаимодействия с КА и таких методов и средств формирования пылевых шлейфов, при которых достигается, при минимальном нежелательном рассеянии пыли, сообщение КА требуемых импульсов орбитальной скорости: в сторону как увеличения, так и уменьшения энергии орбиты, а также для изменения наклонения орбиты КА.
Техническим результатом изобретений является увеличение диапазона допустимых для ЭДМ орбит КА, расширение возможностей ЭДМ по изменению параметров орбит КА, а также уменьшение нежелательного рассеяния пылевых частиц.
Решение поставленной задачи с получением указанного технического результата, в варианте изменения энергии орбиты КА, достигается в предложенном способе осуществления ЭДМ КА, включающем выведение мелкодисперсного вещества, например, реголита из области орбиты Луны на параболическую или слабо-гиперболическую геоцентрическую орбиту, формирование посредством ИУ протяженного шлейфа микрочастиц указанного вещества с обеспечением прохождения КА вдоль шлейфа и взаимодействия с его микрочастицами для получения заданного изменения орбитальной скорости КА вследствие передачи ему импульса микрочастиц, причем отличие способа состоит в том, что указанную геоцентрическую орбиту реализуют в плоскости исходной, преимущественно круговой орбиты КА, с пересечением этой орбиты КА в точках, имеющих значения истинной аномалии ϑ ≠ 90°, причем в случае торможения КА ϑ > 90°, а в случае ускорения КА ϑ < 90°, формируя шлейф микрочастиц по вектору скорости ИУ относительно КА при сближении КА и этого устройства, непосредственно перед началом взаимодействия шлейфа с КА, при этом защищают КА экраном с плоской поверхностью, перпендикулярной вектору орбитальной скорости КА, организуя близкое к упругому взаимодействие микрочастиц шлейфа с этой поверхностью.
В варианте изменения наклонения орбиты КА, способ осуществления ЭДМ КА включает выведение мелкодисперсного вещества, например, реголита из области орбиты Луны на параболическую или слабо-гиперболическую геоцентрическую орбиту, формирование посредством ИУ протяженного шлейфа микрочастиц указанного вещества с обеспечением прохождения КА вдоль шлейфа и взаимодействия с его микрочастицами для получения заданного изменения орбитальной скорости КА вследствие передачи ему импульса микрочастиц, причем отличие состоит в том, что указанную геоцентрическую орбиту реализуют в плоскости, пересекающей плоскость исходной орбиты КА, формируя шлейф микрочастиц по вектору скорости ИУ относительно КА при сближении КА и этого устройства в точке пересечения указанной геоцентрической орбиты и орбиты КА, непосредственно перед началом взаимодействия шлейфа с КА, при этом защищают КА экраном с плоской поверхностью, перпендикулярной вектору нормали к плоскости орбиты КА, организуя близкое к упругому взаимодействие микрочастиц шлейфа с этой поверхностью.
В обоих вариантах, инициирование процесса формирования протяженного шлейфа может осуществляться путем сообщения ансамблю пылевых частиц при их высвобождении из контейнера одноименного электрического заряда для электростатического расталкивания частиц вдоль оси формируемого шлейфа.
Для компенсации ухода КА из области взаимодействия, осуществляют сканирование шлейфом, взаимодействующим с КА, в ограниченном угле в плоскости, проходящей через вектор скорости инициирующего устройства относительно КА и вектором изменения орбитальной скорости КА вследствие взаимодействия КА со шлейфом.
Данное, близкое к упругому взаимодействие быстрых микрочастиц шлейфа с поверхностью экрана организуют путем сообщения этой поверхности заряда, одноименного с зарядом микрочастиц.
Для запуска средства выведения ИУ из области орбиты Луны на орбиту перелета к Земле целесообразно использовать стартовое устройство в виде электромагнитного ускорителя (ЭМУ) на поверхности Луны или в окололунном пространстве.
В свою очередь, пылевое вещество может доставляться к средству выведения также с помощью ЭМУ, из мест накопления и обработки этого вещества либо на поверхности Луны, либо на окололунной орбите или в других точках орбиты Луны вокруг Земли.
Высвобождение пылевых частиц из контейнера производится в псевдоожиженном («взвешенном») состоянии, т. е. частицы не слипаются и не оседают на стенках контейнера - это дает их более равномерную, при экспозиции, электризацию за короткие времена, причем оптически непрозрачный шлейф электризуется в основном отрицательно (электронами космической плазмы), а прозрачный - в основном положительно, в процессе фотоэмисии.
Движение носителя и ИУ по перелетной орбите рассматривается в рамках ограниченной задачи двух тел (без учета полей тяготения Луны и Солнца).
Перечень фигур
Существо предлагаемых изобретений поясняется нижеследующим детальным описанием примеров их осуществления с прилагаемыми чертежами, на которых представлены:
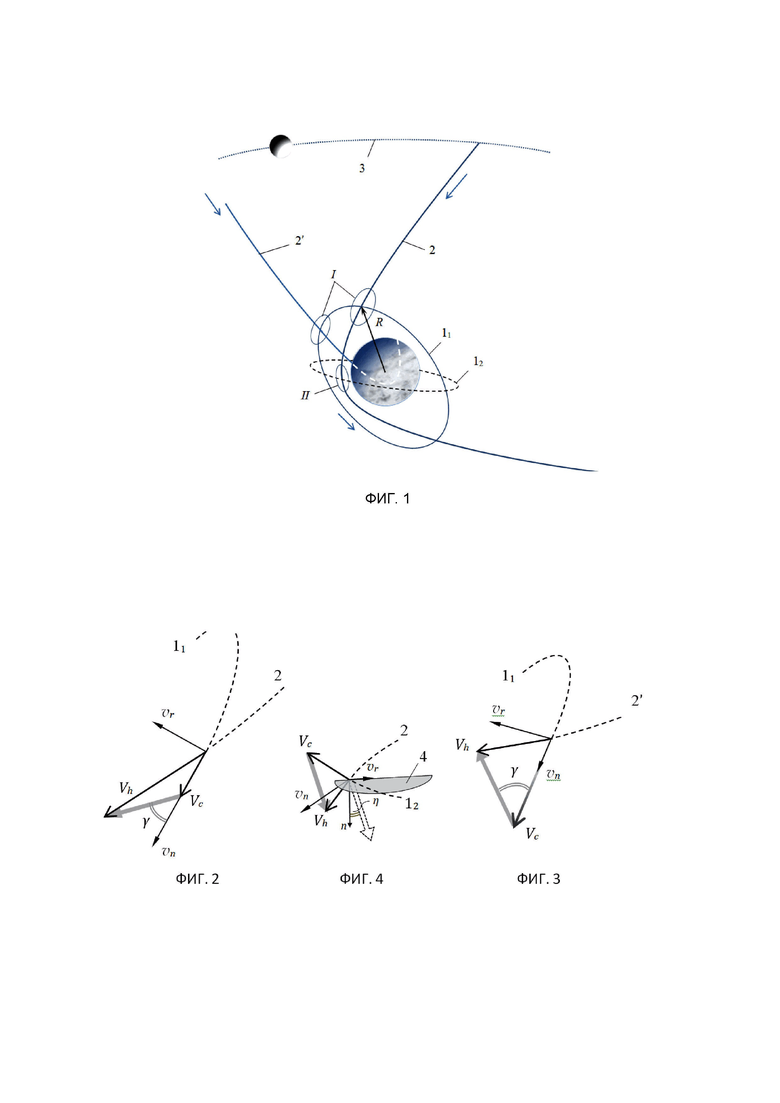
Фиг. 1 - орбитальные схемы осуществления ЭДМ.
Фиг. 2-4 - геометрические соотношения между скоростями КА, ИУ и шлейфа в разных областях взаимодействия.
Фиг. 5 - принципиальная конструктивная схема ИУ.
Фиг. 6-7 - основные характеристики процесса инициации шлейфа.
Фиг. 8 - пример конструкции КА, взаимодействующего со шлейфом.
Фиг. 9 - вариант осуществления сканирования шлейфом.
Фиг. 10-11 - основные параметры плоских ЭДМ (изменения энергии орбиты КА).
Фиг. 12-13 - основные параметры ЭДМ для изменения наклонения орбиты КА.
Фиг. 14 - параметры электростатического отражения микрочастиц от экрана КА.
Фиг. 15 - общая картина столкновения микрочастиц шлейфа с экраном.
Раскрытие и примеры осуществления изобретения
ЭДМ в первом варианте состоит в изменении энергии (высоты) орбиты 11 некоторого КА посредством взаимодействия со шлейфом лунной пыли, доставляемой в области взаимодействия I по геоцентрическим траекториям 2 и 2’ из района орбиты 3 Луны (фиг.1). Эти траектории являются параболическими (е = 1) или слабо-гиперболическими (е = 1,01-1,1) и лежат в плоскости орбиты 11, что обеспечено начальными условиями при старте носителя ИУ из района орбиты Луны и последующими коррекциями. Старт носителя целесообразно производить с помощью ЭМУ.
Геоцентрическое движение ИУ, КА и шлейфа рассматривается в рамках ограниченной задачи двух тел (вне сферы влияния Луны и без учета притяжения Солнца), а относительное движение ИУ, КА и шлейфа в областях взаимодействия I и II - как движение в пространстве, свободном от гравитации, т. к. процесс взаимодействия относительно краток (< 1 с) и локализован в области с размерами ~ 1-10 км.
В кеплеровском движении трансверсальная (vn) компонента скорости Vh (фиг.2-3) на геоцентрической орбите 2 (2’) может быть записана как:

где:
 - круговая скорость на орбите радиуса R в точке пересечения орбит КА и ИУ (фиг.1).
- круговая скорость на орбите радиуса R в точке пересечения орбит КА и ИУ (фиг.1).
Таким образом, скорость КА на исходной круговой орбите может быть максимально изменена на величину:  откуда видно, что при
откуда видно, что при  > 1 (ϑ <90o) имеет место чистое ускорение КА (увеличение энергии орбиты), а при < 1 (ϑ > 90o) - чистое торможение (уменьшение энергии орбиты). В фокальной точке = 1 (ϑ = 90o), и ΔVc = 0.
> 1 (ϑ <90o) имеет место чистое ускорение КА (увеличение энергии орбиты), а при < 1 (ϑ > 90o) - чистое торможение (уменьшение энергии орбиты). В фокальной точке = 1 (ϑ = 90o), и ΔVc = 0.
Фактическое изменение δVc круговой скорости КА (0 < |δVc| < |ΔVc|) зависит от массы шлейфа и характера его взаимодействия с экраном КА.
При этом шлейф должен быть ориентирован по вектору ΔVh = Vh - Vc относительной скорости ИУ и КА, как показано серыми стрелками на фиг.2 и 3. Этот вектор направлен под углом γ к вектору скорости КА. Данный угол суть угол падения пылевого потока на экран КА, по отношению к нормали n экрана (см. фиг.8), и определяется только параметром (или истинной аномалией ϑ):

где vr - радиальная компонента скорости Vh. Здесь и далее будем считать эксцентриситет е = 1, т. е. рассмотрим параболические орбиты (отличие е от 1 не принципиально для существа изобретений).
Параметр cosγ определяет эффективность ЭДМ, т. е. долю импульса шлейфа, передаваемую КА и ~ ΔVh cos γ.
Заметим, что при проведении ЭДМ ускорения КА (фиг.2) экран расположен сзади КА (ИУ «догоняет КА»), а при ЭДМ торможения КА (фиг.3) - спереди КА (КА «догоняет ИУ»).
Специалисту ясно, что отклонением экрана от указанной ориентации можно получить изменения скорости Vc не только вдоль орбиты, но и в направлении радиус-вектора и бинормали орбиты КА, т. е. осуществить пространственный ЭДМ.
Также ясно, что орбита КА может отличаться от круговой, в частности, ЭДМ можно эффективно провести в апогее или перигее орбиты КА.
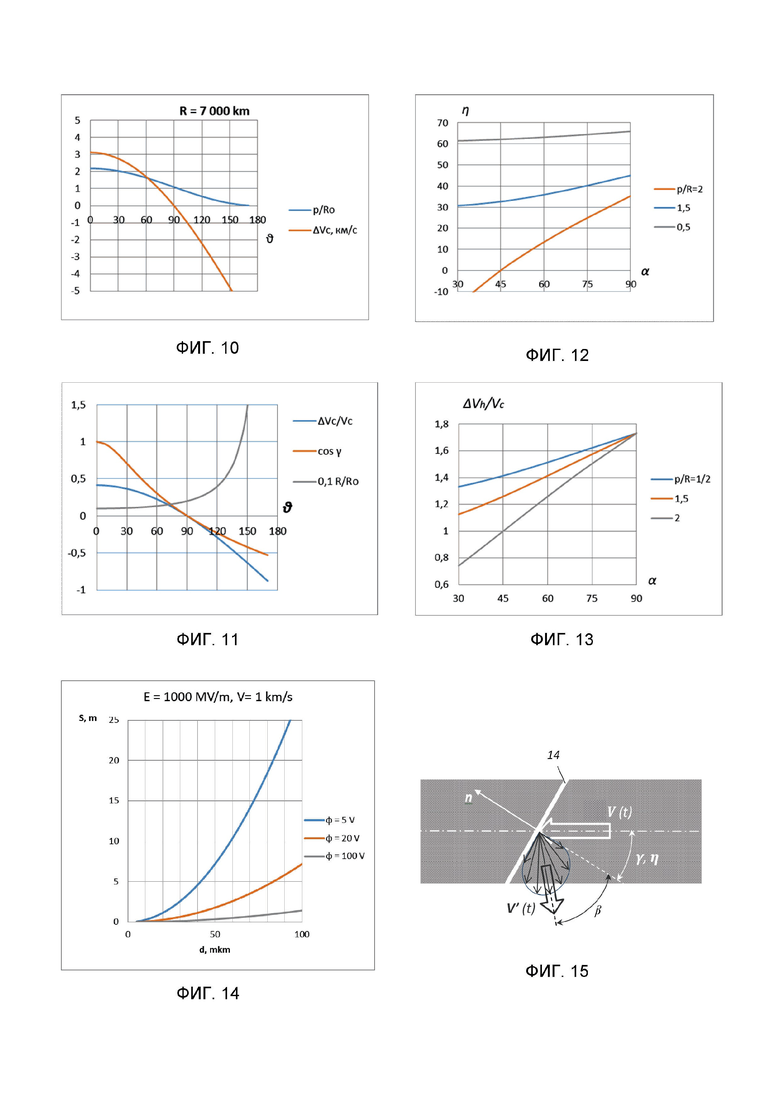
Из примера низкой орбиты КА (≈ 600 км), представленного на фиг.10, видно, что максимальное увеличение ΔVc скорости КА получают в перигее: ϑ = 0°; ≈ 2, а меньшие ускорения КА и, тем более, торможение КА (ΔVc < 0) - можно получить только на траекториях 2’, проходящих под поверхностью Земли:  (фиг.1). В подобных случаях средства инициации шлейфа (ИУ 5 на фиг.9) являются одноразовыми и, после высвобождения пылевых частиц, сгорают в атмосфере.
(фиг.1). В подобных случаях средства инициации шлейфа (ИУ 5 на фиг.9) являются одноразовыми и, после высвобождения пылевых частиц, сгорают в атмосфере.
Из общих зависимостей фиг.11 вновь следует, что наиболее эффективно ускорение КА при ϑ = 0 (в перигее).
На фиг.11 также представлены радиусы R начальных орбит КА в отношении к среднему радиусу Земли Ro ≈ 6400 км, для осуществления ЭДМ с которых допустимы траектории 2, проходящие над Землей (фиг.1). Из представленных данных видно, что торможение КА становится эффективным (> 40%) лишь при ϑ > 150° , что отвечает весьма высоким начальным орбитам КА: R ~ 100 000 км и более. Для более низких начальных орбит КА следует использовать траектории 2’, пересекающие поверхность Земли.
ЭДМ во втором варианте состоит в изменении наклонения орбиты 12 КА с использованием траектории 2 и по существу является обобщением ЭДМ на пространственный случай, когда плоскость перелетной орбиты 2 и плоскость 4 орбиты КА пересекаются под углом α (фиг.1 и 4).
В этом случае вместо угла γ используется угол η между вектором ΔVh = Vh - Vc относительной скорости КА и ИУ и нормалью п к плоскости орбиты КА. Проекция импульса шлейфа на указанную нормаль ~ ΔVh cos η обеспечивает изменение наклонения орбиты КА δi ~ δVп/Vc, где δVп - приращение скорости КА вдоль нормали п в результате его взаимодействия со шлейфом.
Из геометрических соображений можно получить (фиг.4):

где  Параметры ΔVh/Vc и η представлены на фиг.12-13 в функции от угла α, позволяя выбрать подходящий режим взаимодействия, как с точки зрения эффективности ЭДМ (ΔVh cos η → max), так и с учетом допустимых характеристик взаимодействия экрана со шлейфом.
Параметры ΔVh/Vc и η представлены на фиг.12-13 в функции от угла α, позволяя выбрать подходящий режим взаимодействия, как с точки зрения эффективности ЭДМ (ΔVh cos η → max), так и с учетом допустимых характеристик взаимодействия экрана со шлейфом.
В частности, простым и эффективным является выбор α = 90°, χ = 0, дающий максимальную относительную скорость КА и шлейфа  для всех возможных орбит 2, проходящих через область II (фиг.1) и допускающих регулирование величины передаваемого КА импульса за счет изменения угла η (фиг.12) путем формирования орбиты 2, пересекающей орбиту 12 КА в соответствующей своей точке, т. е. - выбором подходящей величины (или ϑ).
для всех возможных орбит 2, проходящих через область II (фиг.1) и допускающих регулирование величины передаваемого КА импульса за счет изменения угла η (фиг.12) путем формирования орбиты 2, пересекающей орбиту 12 КА в соответствующей своей точке, т. е. - выбором подходящей величины (или ϑ).
Интересен также случай наклонной, при α = 45°, траектории 2, пересекающей орбиту 12 КА в перигее: = 2 (фиг.12). В этом случае η = 0, γ = 90°, т. е. шлейф взаимодействует с экраном строго по нормали п (см. фиг.8), причем  Данный случай имеет определенные технические преимущества: простота контроля геометрии взаимодействия КА с потоком пыли, ослабление и даже отсутствие требования зеркального отражения шлейфа от экрана, а также - необходимости сканирования шлейфом.
Данный случай имеет определенные технические преимущества: простота контроля геометрии взаимодействия КА с потоком пыли, ослабление и даже отсутствие требования зеркального отражения шлейфа от экрана, а также - необходимости сканирования шлейфом.
Специалисту ясно, что отклонением экрана от указанной ориентации (3) можно получить изменение не только бинормальной компоненты скорости Vc, но и вдоль радиус-вектора и трансверсали орбиты КА, т. е. можно варьировать такие параметры орбиты КА, как положение линии узлов, аргумента перигея и т. д.
Также ясно, что данный вариант ЭДМ можно эффективно провести в какой-либо точке эллиптической орбиты КА, например, в ее апогее.
Для формирования пылевого шлейфа, взаимодействующего с КА, могут быть предложены ИУ 5, показанные на фиг. 5, 9.
Основным элементом ИУ является уплощенный цилиндрический контейнер («кассета») 6 достаточно большого радиуса R, в котором размещается пылевое вещество 9. На внешней поверхности (днище) контейнера установлены приборный модуль 7 (включающий средства обмена навигационными и телеметрическими данными с некоторым носителем ИУ) и исполнительные органы 8 (например, матричные микрореактивные двигатели).
ИУ может содержать множество контейнеров (в виде «матрицы» или «решетки»), образованных на общем днище (фиг.9).
Исходный ансамбль пылевых частиц 9, высвобождаемых из ИУ 5, имеет форму «блина», что диктуется требованием максимальной скорости удлинения (vH) шлейфа вдоль его оси и минимальной скорости радиального расширения (vR) шлейфа - под действием электростатического поля, вызванного электризацией пылевых частиц в космической среде.
Псевдоожиженное состояние исходного пылевого ансамбля 9 обеспечивается, например, мембранными пьезоэлектрическими преобразователями. При этом в момент экспозиции среде космической плазмы, для зарядки частиц ансамбля, слой 9 может быть удален за пределы контейнера 6.
Приближенную картину инициации и начальной фазы 11 образования шлейфа можно получить в допущении о близости формы шлейфа, во всех фазах его формирования, к цилиндрической, и воспользовавшись приемами решения задачи о тонких заряженных дисках (см. [6] А.Н. Паршаков. Принципы и практика решения задач по общей физике. Часть 2. Электромагнетизм. Изд. Пермского ГТУ. 2010, с.54-55), распространив эти приемы на цилиндрические заряженные области.
Можно получить, в частности, следующие формулы для напряженностей электрического поля вблизи торцов (EH) и боковой поверхности (ER) цилиндрических шлейфов с однородной объемной концентрацией (n) частиц:
Здесь R, h - радиус и высота (длина) шлейфа; εo = 8,9*10-12 Ф/м - электрическая постоянная; q - заряд пылевой частицы диаметром d, связанный с ее потенциалом φ следующим образом:

Значения q и φ следует рассматривать как средние по объему шлейфа. Напряженности EH и ER убывают по мере погружения от поверхности вглубь цилиндров, так что продольное и радиальное электростатические расширения ансамбля частиц носят регулярный характер: чем ближе к поверхности - тем быстрее, и наоборот, ввиду чего и плотность (~n) ансамбля сохраняет, в первом приближении, равномерное распределение по объему, быстро убывая с ростом длины (h) шлейфа.
Массу М шлейфа, связанную с начальной концентрацией частиц реголита (ρ ≈ 3100 кг/м3) в цилиндрическом объеме пылевого слоя 9 (фиг.5), можно оценить как

При выводе (6) считается, что слой 9 прозрачен для частиц космической плазмы, т. е. его толщина hо ~ vl, где l = (σn)-1 - глубина оптической прозрачности (σ- миделево сечение частицы с диаметром d), а коэффициент v >1 учитывает, что при электризации частиц действием космической плазмы проникающие в «блин» протоны и, особенно, электроны (тепловые скорости которых, соответственно, 45 км/с и 2000 км/с [7]) прежде их поглощения пылевыми частицами испытывают множество столкновений с ними (рассеивая свою энергию), так что длина их свободного пробега возрастает.
При расширении шлейфа быстро возрастает его оптическая прозрачность, и доминирующей становится фотоэлектронная эмиссия, меняющая знак зарядки пылевых частиц, причем эта перезарядка шлейфа несколько сдерживает его разбухание.
Электроны околоземной плазмы и солнечного ветра могут заряжать микрочастицы до φ = -100 В, фотоэлектронная эмиссия повышает эту величину до φ = +2…5 В (см. [7] А. И. Акишин, Л. С. Новиков. Электризация космических аппаратов. Сер. Космонавтика, астрономия, 3/85. Изд. «Знание». М. 1985, с.10-22). Скорость зарядки микрочастицы зависит от многих факторов, но для достаточно разреженного ансамбля частиц она происходит за малые доли секунды.
Донная часть контейнера 6 (фиг.5) может служить коллектором электронов космической плазмы. Также может быть предусмотрена дополнительная (поворотная относительно ИУ) поверхность, заряжаемая положительно под действием солнечного излучения. Указанные коллектор и заряжаемая поверхность питают эмиттер 10 заряженных частиц (электронов или ионов), например, полый катод или электронную пушку, облучающие широким лучом слой 9 пылевых частиц на дне контейнера 6, обеспечивая его дополнительную, при необходимости, электризацию.
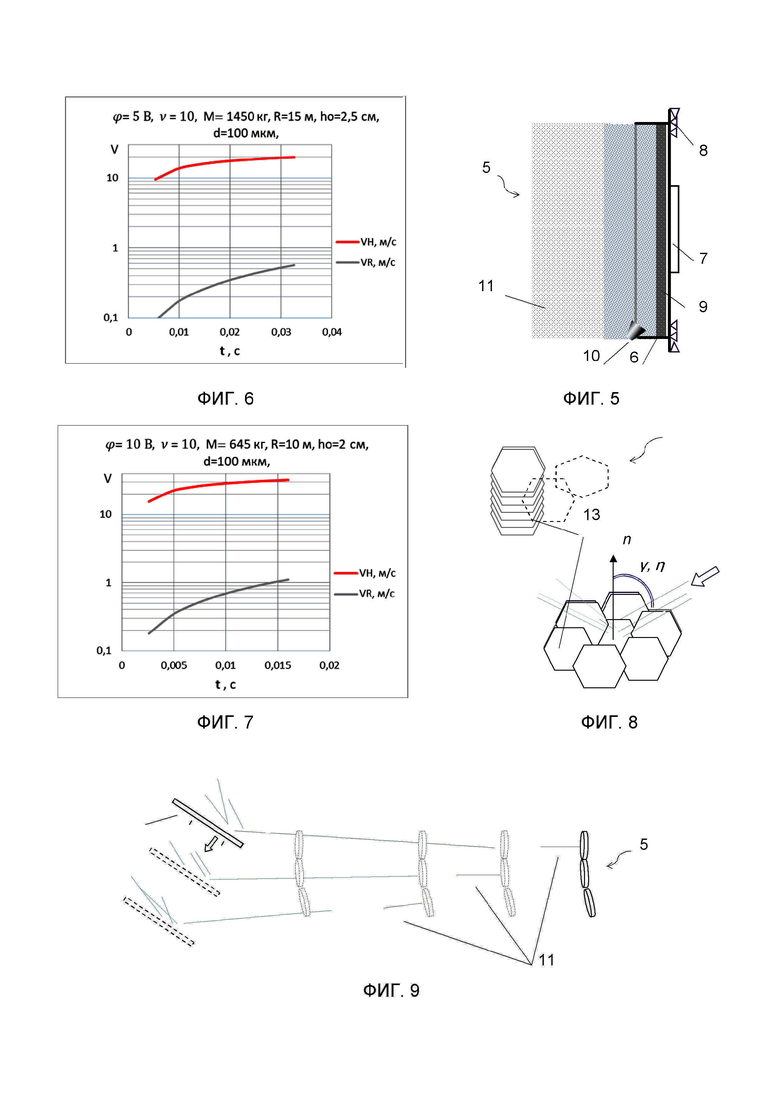
На фиг. 6-7 представлены примеры процесса инициирования шлейфа, а именно нарастание фронтальных скоростей свободных продольного (vH) и радиального (vR) расширений исходного «блина» за время десятикратного его «утолщения»: ξ = h/h0 = 10, для сравнительно небольших потенциалов зарядки φ = 5 В и 10 В.
Как видно из графиков, скорости расширения vH и vR достаточно быстро приходят к практически постоянным значениям: vH ≈ 20 (30) м/с; vR ~ 1 (1,5) м/с, и шлейф продолжает расширяться, особенно быстро в продольном направлении, «по инерции».
Пример конструкции КА, взаимодействующего со шлейфом, дан на фиг.8.
Взаимодействие КА со шлейфом носит импульсный характер: время взаимодействия может составлять ~ 0,1-0,01 с, т. к. практически можно рассчитывать на длину шлейфа 100-1000 м при относительной скорости КА и шлейфа ~ 2000-3000 м/с. При ощутимом приращении скорости КА ~ 100-500 м/с величина среднего ускорения может достигать 103-105 м/с2. Такие инерционные нагрузки лежат вне области пилотируемых перелетов и приемлемы для «грузовых» КА, перевозящих ресурсы и оборудование.
Поэтому целесообразной структурой КА 12 может являться конструкция, состоящая из модулей 13 так называемых «панельных спутников», соединенных с возможностью их развертывания в конфигурацию плоского экрана. Рабочая поверхность экрана может быть сделана достаточно большой и равномерно воспринимающей давление набегающего на нее пылевого потока.
Полезная нагрузка КА должна быть равномерно распределена по модулям 13.
В процессе взаимодействия меняются скорость и положение КА относительно исходного шлейфа, как это схематично показано на фиг.9. Из приведенных выше данных следует, что за время взаимодействия (< 0,1 c) смещение КА от оси исходного шлейфа может достигать 5-10 м, что, хотя и немного, но во избежание потерь активной массы пыли - требует компенсации. С этой целью можно применить сканирование шлейфом.
Сканирование принципиально просто достигается небольшим вращением ИУ 5 с помощью микродвигателей 8 (фиг.5), однако надо учитывать, что конструкция кассеты 6, при ее малой массе, будет весьма нежесткой (т. к. R >> ho), что может не обеспечить необходимой точности сканирования.
Альтернативным решением служит выполнение ИУ 5 в виде массива («матрицы») кассет 6, выставляемых с соответствующим небольшим наклоном друг к другу. Инициация отдельных шлейфов 11 производится с некоторой заранее задаваемой малой задержкой, так что инициированные шлейфы будут формироваться в направлениях, отслеживающих смещение КА (фиг.9).
Процесс взаимодействия пылевого потока с поверхностью экрана иллюстрируется фиг.14-15.
Заряженные пылевые частицы шлейфа, набегающие на поверхность экрана КА, заряженную (с поверхностной плотностью σ) одноименно частицам, по крайней мере, частично тормозятся электростатическим полем поверхности  Напряженность этого поля не должна превышать значения
Напряженность этого поля не должна превышать значения  , во избежание автоэлектронной эмиссии [7]. Величина и знак напряженности поддерживаются с помощью, например, электронной пушки или плазменного контактора.
, во избежание автоэлектронной эмиссии [7]. Величина и знак напряженности поддерживаются с помощью, например, электронной пушки или плазменного контактора.
Пути торможения (S, м) микрочастиц реголита по направлению нормали к поверхности экрана представлены на фиг.14 в зависимости от диаметра (d, мкм) частиц и потенциала их зарядки (φ, В). Начальная скорость частиц вдоль нормали экрана принята Vo = 1 км/с. Значения φ = 5 В отвечают зарядке частиц путем фотоэлектронной эмиссии, а φ = 20-100 В - электронами окружающей плазмы (в первом случае знак заряда «+», а во втором «-»).
Как видно, желателен больший потенциал зарядки микрочастиц, что отвечает оптически непрозрачным (плотным) шлейфам. Однако и при φ = +5 В пути торможения могут быть приемлемы. Например, для проведения ЭДМ в магнитосфере (высоты орбит КА >104 км), где характерный радиус Дебая окружающей плазмы RD ~ 100 м, подходят любые микрочастицы с параметрами по фиг.14. В среде солнечного ветра, где RD < 10 м [7], подходят частицы с d ~ 50 мкм и менее и т. д.
Необходимость электростатического отталкивания пылевых частиц от экрана КА в области рассматриваемых ЭДМ обусловлена следующими факторами.
Из-за несовершенства поверхности экрана и неидеальности формы и структуры частиц пыли отражение от экрана будет в той или иной мере диффузным, с диаграммой рассеяния, изображенной на фиг.15. При γ, η = 0 эту диаграмму можно считать симметричной относительно оси шлейфа, набегающего на поверхность 14 экрана со скоростью V(t). Но при падении шлейфа под углом к нормали п экрана симметрия нарушается, так что «эффективная» скорость V’(t) отраженного пылевого потока, полученная осреднением по множеству отраженных частиц, будет направлена под углом β к нормали п, отличным от угла падения γ или η (далее для определенности будем рассматривать угол η).
Модуль вектора V’(t) определяется как неупругими потерями, так и диффузным рассеянием, что можно учесть общим коэффициентом σ < 1: V’(t) = σ V(t). Наконец, некоторая часть ζ < 1 ансамбля соударяющихся частиц пыли остается на экране.
При взаимодействии шлейфа с КА разности потоков импульса к экрану 14 и от экрана будет следующими:

где  - масса пыли, соударяющейся в единицу времени с экраном 14 (ς, F - плотность шлейфа и площадь миделя экрана 14 в направлении оси шлейфа).
- масса пыли, соударяющейся в единицу времени с экраном 14 (ς, F - плотность шлейфа и площадь миделя экрана 14 в направлении оси шлейфа).
Чтобы действие пылевого потока было строго по нормали п, углы падения и отражения должны удовлетворять условию  т. е.
т. е.

В этом уравнении β = β(η, V,..) определяется поверхностью экрана 14 и параметрами пылевого потока. Из (8) может быть найден требуемый угол η.
Однако условие (8) при существенно неупругом соударении частиц с экраном и значительной адгезии частиц к экрану:  либо невыполнимо, либо приводит к слишком малым углам η (или γ), не характерным для многих ЭДМ (см. фиг.11-12).
либо невыполнимо, либо приводит к слишком малым углам η (или γ), не характерным для многих ЭДМ (см. фиг.11-12).
В этой связи особое место занимают отмеченные выше ЭДМ с γ, η = 0, свободные от ограничений по σ и ζ. В общем же случае требуется близкое к зеркальному отражение частиц от экрана, что существенно зависит от скорости частиц.
Пылевые частицы после соударения с поверхностью экрана отражаются от нее с той или иной потерей скорости, либо прилипают к поверхности - это определяется соотношением упругой (U) и адгезионной (A) энергий микрочастиц. Характерно, что для частиц с d = 5-10 мкм U >>A при скоростях до V ≈ 1000 м/с; для d = 20 мкм U >>A при скоростях 500-600 м/с и U ≈A при V ≈ 1200 м/с; для d = 40-80 мкм U >A до V ≈1200-1400 м/с (но разность U-A невелика), см. [8] С.В. Клинков, В.Ф. Косарев. Моделирование адгезионного взаимодействия частиц с преградой при газодинамическом напылении. ИТПМ СО РАН. Физическая мезомеханика, 5, 3 (2002), с.31-32.
Таким образом, для большинства пылевых частиц при скорости соударения V < 1000 м/с упругая энергия (U) значительно выше адгезионной (A), т. е. σ ≈ 1, ζ ≈ 0, и можно рассчитывать на отражение, близкое к зеркальному.
При взаимодействии с КА на низких орбитах относительная скорость КА и шлейфа в начале взаимодействия V0 ~ 3000 м/с, а составляющая по нормали к экрану V0 cos γ ~ 0,5 V0 = 1500 м/c (фиг.11). Вследствие электростатического торможения скорость частиц падает до ~500 м/с, что обеспечивает дальнейшее механическое отражение частиц, близкое к упругому.
Подобная картина имеет место и для ЭДМ изменения наклонения орбиты (фиг.12).
Для средних и высоких орбит КА (>15000 км) начальная относительная скорость КА и шлейфа V0 ~ 2000 м/с, так что при любых углах η и γ электростатическое торможение снижает V0 до ~ 1000 м/с, что соответствует условиям упругого соударения [8].
Зеркальное отражение является, очевидно, наилучшим и с точки зрения эффективности использования импульса шлейфа для изменения ∆V скорости КА. В данном режиме движение КА с массой mо в направлении -n достаточно точно описывается уравнением:
решение которого при η = β легко получается с учетом (7) и имеет вид:

где М - масса шлейфа, прореагировавшая с экраном КА.
Например, ΔV = 0,86Vo при М = mо и η ≈ 0, т. е. 86% импульса шлейфа передается КА.
Таким образом, предлагаемые изобретения позволяют увеличить диапазон орбит КА, доступных для ЭДМ, осуществляемых с использованием потоков лунной пыли, расширить возможности ЭДМ до уровня изменения принципиально любых параметров орбит КА, при уменьшении нежелательного рассеяния пылевых частиц.
.
Промышленная применимость
Для осуществления предлагаемых изобретений не требуется разработки принципиально новых технологий в области космической техники, здесь могут быть использованы методы и технические средства известного типа, но с более высокими рабочими характеристиками, а также проведены экспериментальные исследования по конкретным аспектам электризации и динамики пылевых потоков реголита.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ и система обеспечения межорбитального маневра КА в среде космической плазмы | 2023 |
|
RU2821815C1 |
| Способ формирования пылевого потока для проведения межорбитального маневра КА и система для его реализации | 2023 |
|
RU2821855C1 |
| Способ очистки околоземного космического пространства от космического мусора потоками лунной пыли | 2023 |
|
RU2812988C1 |
| Способ формирования пылевого потока для механического взаимодействия с орбитальными КО | 2023 |
|
RU2816322C1 |
| Способ ограничения засорения эксплуатируемых областей околоземного космического пространства | 2017 |
|
RU2665156C1 |
| СПОСОБ УДЕРЖАНИЯ КОСМИЧЕСКОГО АППАРАТА НА ГЕОСИНХРОННОЙ 24-ЧАСОВОЙ ОРБИТЕ | 2013 |
|
RU2535353C2 |
| СПОСОБ АВТОНОМНОГО ОПРЕДЕЛЕНИЯ ОРБИТЫ И ОРИЕНТАЦИИ КОРПУСА КОСМИЧЕСКОГО АППАРАТА В ПРОСТРАНСТВЕ ПРИ ОТСУТСТВИИ АПРИОРНОЙ ИНФОРМАЦИИ | 2013 |
|
RU2542599C2 |
| СПОСОБ АВТОНОМНОГО ОЦЕНИВАНИЯ ИЗМЕНЕНИЙ ОРБИТЫ ВИЗИРУЕМОГО КОСМИЧЕСКОГО АППАРАТА | 2015 |
|
RU2624408C2 |
| Способ обнаружения кометного вещества и идентификации его с источником происхождения | 2017 |
|
RU2673128C1 |
| Способ зондирования лунного грунта | 2017 |
|
RU2667695C1 |
Группа изобретений относится к управлению космическими аппаратами (КА) с использованием мелкодисперсного вещества, например, лунной пыли - реголита в ходе проведения межорбитального маневра. При маневре пыль выводится из области орбиты Луны на параболическую или гиперболическую перелетную орбиту, имеющую общие точки с орбитой КА. В этих точках формируют протяженные пылевые шлейфы, воздействующие на поверхность экрана, интегрированного с КА, под заданным углом к ней. Шлейф формируют по вектору относительной скорости КА и устройства, инициирующего шлейф. Изменяют скорость КА в результате передачи ему части импульса шлейфа. Выбором указанных орбит и их общих точек обеспечивают величину и направление изменения скорости КА, отвечающих изменению требуемых параметров (в частности, высоты и/или наклонения) орбиты КА. Близкое к упругому соударение частиц пыли с экраном обеспечивают частичным электростатическим торможением частиц полем экрана. Достигается увеличение диапазона допустимых для межорбитального маневра орбит КА, расширение возможностей маневра по изменению параметров орбит КА, а также уменьшение нежелательного рассеяния пылевых частиц. 2 н. и 3 з.п. ф-лы, 15 ил.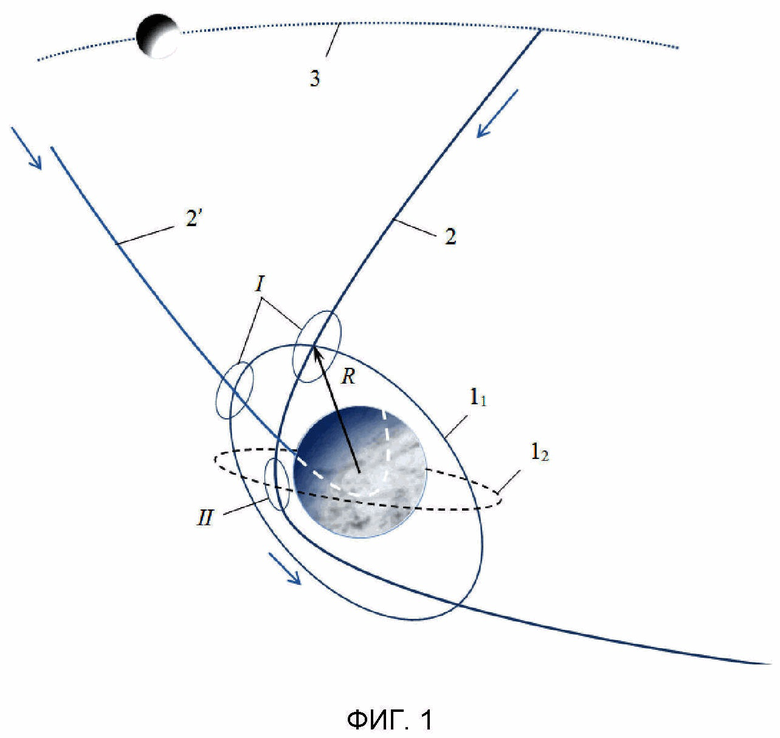
1. Способ осуществления межорбитального маневра КА для изменения энергии его орбиты, включающий выведение мелкодисперсного вещества, например, реголита, из области орбиты Луны на параболическую или слабо-гиперболическую геоцентрическую орбиту, формирование посредством инициирующего устройства протяженного шлейфа микрочастиц указанного вещества с обеспечением прохождения КА вдоль шлейфа и взаимодействия с его микрочастицами для получения заданного изменения орбитальной скорости КА вследствие передачи ему импульса микрочастиц, отличающийся тем, что указанную геоцентрическую орбиту реализуют в плоскости исходной, преимущественно круговой орбиты КА, с пересечением этой орбиты КА в точках, имеющих значения истинной аномалии ϑ ≠ 90°, причем в случае торможения КА ϑ > 90°, а в случае ускорения КА ϑ < 90°, формируя шлейф микрочастиц по вектору скорости инициирующего устройства относительно КА при сближении КА и этого устройства, непосредственно перед началом взаимодействия шлейфа с КА, при этом защищают КА экраном с плоской поверхностью, перпендикулярной вектору орбитальной скорости КА, организуя близкое к упругому взаимодействие микрочастиц шлейфа с этой поверхностью.
2. Способ осуществления межорбитального маневра КА для изменения наклонения его орбиты, включающий выведение мелкодисперсного вещества, например, реголита, из области орбиты Луны на параболическую или слабо-гиперболическую геоцентрическую орбиту, формирование посредством инициирующего устройства протяженного шлейфа микрочастиц указанного вещества с обеспечением прохождения КА вдоль шлейфа и взаимодействия с его микрочастицами для получения заданного изменения орбитальной скорости КА вследствие передачи ему импульса микрочастиц, отличающийся тем, что указанную геоцентрическую орбиту реализуют в плоскости, пересекающей плоскость исходной орбиты КА, формируя шлейф микрочастиц по вектору скорости инициирующего устройства относительно КА при сближении КА и этого устройства в точке пересечения указанной геоцентрической орбиты и орбиты КА, непосредственно перед началом взаимодействия шлейфа с КА, при этом защищают КА экраном с плоской поверхностью, перпендикулярной вектору нормали к плоскости орбиты КА, организуя близкое к упругому взаимодействие микрочастиц шлейфа с этой поверхностью.
3. Способ по п. 1 или 2, отличающийся тем, что инициирование процесса формирования протяженного шлейфа осуществляют путем сообщения ансамблю пылевых частиц при их высвобождении из контейнера одноименного электрического заряда для электростатического расталкивания частиц вдоль оси формируемого шлейфа.
4. Способ по любому из пп. 1-3, отличающийся тем, что осуществляют сканирование шлейфом, взаимодействующим с КА, в ограниченном угле в плоскости, проходящей через вектор скорости инициирующего устройства относительно КА и вектором изменения орбитальной скорости КА вследствие взаимодействия КА со шлейфом.
5. Способ по любому из пп. 1-4, отличающийся тем, что близкое к упругому взаимодействие быстрых микрочастиц шлейфа с поверхностью экрана организуют путем сообщения ей заряда, одноименного с зарядом микрочастиц.
| УДАЛЕНИЕ КОСМИЧЕСКОГО МУСОРА | 2012 |
|
RU2605799C2 |
| СПОСОБ ВОЗДЕЙСТВИЯ МЕЛКОДИСПЕРСНЫМИ ЧАСТИЦАМИ НА КОСМИЧЕСКИЕ ОБЪЕКТЫ | 2018 |
|
RU2702478C1 |
| US 8657235 B2, 25.02.2014 | |||
| US 20220055775 A1, 24.02.2022 | |||
| СПОСОБ РАЗРУШЕНИЯ ФРАГМЕНТОВ КОСМИЧЕСКОГО МУСОРА | 2011 |
|
RU2462401C1 |
