Предлагаемое изобретение относится к области космической техники и может быть использовано для удержания космического аппарата (КА) по долготе восходящего узла геосинхронной 24-часовой орбиты на условиях удержания КА на геостационарной орбите, когда регламент удержания по широте и гринвичской долготе не превышает ±0,05° относительно рабочей точки стояния. При этом считается, что поскольку допускается активное существование КА на геосинхронных (наклонных) 24-часовых орбитах, то для таких КА колебания по долготе вне области ±0,05° по широте, которые укладываются в регламент, и уходы по широте за пределы ±0,05° не противоречат международным требованиям.
В книге [1] Г.М.Чернявский, В.А.Бартенев, В.А.Малышев «Управление орбитой стационарного спутника», М., Машиностроение, 1984 г., на стр.42, 43, 134-136 приведен метод использования гравитационных полей Луны и Солнца для целенаправленного изменения наклонения плоскости орбиты спутника (КА), взятый за прототип. Суть метода сводится к тому, что осуществляя выведение КА на геостационарную околокруговую орбиту, определенным образом расположенную относительно Луны и Солнца, можно обеспечить практически вдвое меньший интервал изменения наклонения орбиты КА, чем при выведении его на строго экваториальную орбиту. Это же относится и к выведению на орбиты с наклонениями, измеряемыми градусами, которые правильнее считать геосинхронными 24-часовыми орбитами.
Согласно данному методу:
1. Определяют начальные параметры наклонения i0 и долготы восходящего узла орбиты выведения Ω0 с учетом эпохи запуска КА D0 на орбиту и срока его активного существования (САС) ta.с.
Выбранный с учетом конкретных расположений орбит Луны и Солнца на эпоху D0 начальный параметр Ω0 обеспечивает для 
2. Определяют новое значение i0, уменьшая прежнее значение i0 на величину максимальной ошибки выведения по наклонению δi.
3. Прогнозируют расчетным путем значение наклонения орбиты КА на конец САС при максимальных ошибках выведения по наклонению и долготе восходящего узла орбиты ±δi, ±δΩ.
4. Из полученных вариантов расчета, с учетом варианта [δi=0; δΩ=0], определяют такие начальные значения i0 и Ω0, при которых максимальное реализованное начальное наклонение будет равно максимальному конечному наклонению в конце САС.
Метод предполагает отсутствие активных коррекций наклонения. Оптимальное значение Ω0 порядка 270°, конечное значение всегда порядка 90°.
Метод использования гравитационных полей Луны и Солнца для целенаправленного изменения наклонения плоскости орбиты КА следует считать оптимальным вспомогательным методом, который вкупе с тактикой практического удержания геостационарного КА по долготе и широте на основе данных, полученных по траекторным измерениям, являет стратегию удержания КА в заданной области стояния (области рабочей точки стояния). При расчетах коррекций удержания геостационарных КА вектор изменения наклонения Δi направлен в центр малой области ε радиуса r, если вектор наклонения i находится вне этой области, и направлен в противоположную сторону вековым изменениям наклонения, если i находится внутри этой области. В координатах [i;Ω] iε=iопт; Ωε=270°, где iопт - оптимальное значение «точки прицеливания», например равное половине области стояния по наклонению. В случаях перерыва в коррекциях наклонения такая стратегия гарантирует пребывание КА в заданной узкой области по широте [±(0,05 - 0,1)°] относительно точки стояния в течение 30 суток и более. Далее по тексту, для краткости, выражение «относительно точки стояния (орбитальной позиции)» опущено. Метод не имеет недостатков.
В данной работе рассматривается способ, использующий цикличность изменения эксцентриситета в течение САС и использующий в полном объеме вышеприведенный метод пассивного управления наклонением орбиты КА.
В настоящее время, кроме собственно удержания геосинхронного КА в заданной области долгот, требуются работы по коллокации (безопасному сосуществованию) космических аппаратов, находящихся в одной области стояния. Коллокацию следует рассматривать как способ удержания. Известен способ управления кластером находящихся на геостационарной орбите спутников (RU 2284950 С2). Согласно данному способу, включающему измерение параметров орбиты каждого КА, определение по ним текущих значений орбитальных элементов каждого КА, сравнение их с требуемыми и проведение коррекций периода обращения, наклонения и эксцентриситета орбиты, маневры на каждом из КА проводят с помощью двигателей малой тяги, переводя векторы наклонения КА в разнесенные относительно друг друга [кольцевые] области их допустимого изменения так, чтобы угол между линией, соединяющей текущее положение конца каждого вектора с центром соответствующей ему кольцевой области, и направлением на Солнце был равен увеличенной на 180° величине прямого восхождения Солнца, одновременно проводят коррекции векторов эксцентриситета с целью перевода этих векторов в разнесенные относительно друг друга кольцевые области их допустимого изменения так, чтобы линия, соединяющая текущее положение каждого вектора с центром соответствующей ему кольцевой области (далее варианты):
1- отставала от направления на Солнце на половину углового расстояния при движении вектора эксцентриситета по окружности естественного дрейфа в пределах кольцевой области, далее на протяжении всего полета производят изменение относительного расстояния между КА в требуемых пределах за счет компенсации квазивекового приращения вектора наклонения каждого КА в сочетании с коррекцией вектора эксцентриситета, при которой в момент прохождения вектором эксцентриситета середины интервала между точкой входа окружности естественного дрейфа в кольцевую область допустимого изменения вектора эксцентриситета и точкой выхода из этой области линия, соединяющая центр окружности естественного дрейфа и центр соответствующей ему кольцевой области допустимого изменения вектора эксцентриситета, совпадала с направлением на Солнце, приводя тем самым к постоянству относительные векторы наклонения и эксцентриситета между КА;
2- совпадала с направлением на Солнце, далее на протяжении всего полета производят изменение относительного расстояния между КА в требуемых пределах за счет компенсации квазивекового приращения вектора наклонения каждого КА без коррекции вектора эксцентриситета, приводя тем самым к постоянству относительные векторы наклонения и эксцентриситета между КА.
Здесь «окружность естественного дрейфа» - окружность радиуса устойчивого эксцентриситета (определение и вывод формулы (14') см. ниже).
Суть данного способа сводится к синхронизации движения КА в фазовых плоскостях [ix; iy] и [ex; ey], где ix=i·cosΩ; iy=i·sinΩ; ex=e·cos(Ω+ω); ey=e·sin(Ω+ω); ω - аргумент широты перигея, причем синхронизации движения КА в обеих плоскостях, считая, что взаимная ориентация относительных векторов эксцентриситета и наклонения ΔЕ и ΔI 2-3 КА сохраняется, если использовать годовую цикличность естественного дрейфа вектора эксцентриситета и полугодовую цикличность вектора наклонения при условии компенсации вековой составляющей естественного дрейфа вектора наклонения. Обе цикличности обязаны своим существованием исключительно Солнцу, потому начальная и текущая ориентации векторов наклонения и эксцентриситета относительно Солнца являются необходимым условием достижения технического результата.
Предлагается способ, который не требует синхронизации изменения векторов наклонения (что исключительно важно для геосинхронного КА без соответствующего энергетического обеспечения) и не требует согласованных действий по управлению движением КА.
Целью изобретения является:
а) в отсутствие коллокации - гарантированное удержание геосинхронного КА в области ±(0,1-0,05)° по долготе восходящего узла орбиты без ограничений на наклонение (колебания по широте) со стороны баллистики;
б) гарантированная коллокация КА с другими КА в узкой области;
в) многократное сокращение расхода топлива на удержание по сравнению с расходами топлива на геостационарных КА, без потерь качества решения целевых задач на орбите.
Последнее возможно, когда на борту КА есть антенно-приводная система. А она всегда есть даже на геостационарных КА для узконаправленных антенн. Такая же в принципе система есть и на средствах наземных пунктов управления и связи. Требуется только определенным образом запрограммировать ее работу на витке движения КА. Что касается глобальных антенн, то для них антенно-приводная система не нужна в принципе.
Топлива на борту никогда много не бывает, стартовая масса КА на высотах ~36000 км имеет тенденцию к увеличению, поэтому заявленный способ удержания КА является актуальным и даже альтернативным в выборе существования КА - или на геосинхронной 24-часовой орбите, или геостационарной орбите.
Поставленная цель достигается тем, что в способе удержания КА на геосинхронной 24-часовой орбите, включающем определение начальных параметров наклонения и долготы восходящего узла орбиты выведения с учетом эпохи запуска КА на орбиту и срока его активного существования, определение нового значения начального наклонения уменьшением прежнего значения на величину максимальной ошибки выведения по наклонению, прогнозирование расчетным путем значения наклонения орбиты КА на конец срока активного существования при максимальных ошибках выведения по наклонению и долготе восходящего узла орбиты, определение начальных значений наклонения и долготы восходящего узла, при которых максимальное реализованное начальное наклонение будет равно максимальному конечному наклонению в конце срока активного существования, введены новые операции, заключающиеся в том, что определяют величину устойчивого эксцентриситета еуст для выводимого КА; определяют предварительную величину минимального эксцентриситета еmin как сумму максимально допустимого эксцентриситета при удержании КА по долготе при нулевом наклонении (на геостационарной орбите) и отношения радиуса зоны отчуждения между КА, занимающими одну и ту же рабочую позицию на орбите, к радиусу геостационарной орбиты; определяют годограф изменения вектора эксцентриситета под действием светового давления в полярной системе координат [е;θ], где θ - угол между направлениями на Солнце в начальную эпоху (дату окончания приведения в область стояния) и на перигей орбиты КА, полярная ось направлена из центра Земли на Солнце и включает радиус-вектор еmin, при котором θ равно нулю, полярное расстояние равно эксцентриситету, вектор полярного расстояния в течение года описывает окружность радиуса еуст, и, зная амплитуду колебаний угла θ, уточняют величину еmin и годограф в целом; после выведения КА на геосинхронную 24-часовую орбиту и определения фактических параметров движения определяют срок «0», в течение которого фактическое начальное наклонение уменьшится до нуля; по годографу определяют оптимальное значение вектора начального эксцентриситета е0 на начальную эпоху, при котором линия апсид совмещена с радиус-вектором Солнца, и циклические годовые эволюции вектора е [е,θ], в отсутствие негативного влияния на них активных сил, гарантируют в конце срока «0» минимальное расхождение между векторами е и еmin; на этапе приведения КА в заданную область стояния одновременными коррекциями периода обращения и эксцентриситета доводят фактическое текущее значение вектора эксцентриситета до расчетного е0; на этапе удержания, ближе к окончанию срока «0» проводят уточнение времени перехода в режим функционирования на геостационарной орбите, когда наклонение орбиты КА достигнет предельно допустимого наклонения iпред, при котором выход по широте за предельное значение для геостационарных КА осуществляется на границе номинальной области стояния по долготе; проводят коррекцию вектора эксцентриситета с целью, чтобы он равнялся номинальному для коллокации КА в заданной области стояния, а линия апсид орбиты геосинхронного КА совпала с линией узлов орбиты; в течение времени, пока наклонение производит эволюции в диапазоне [0-iпред], проводят активную коллокацию КА без взаимодействия с центрами управления смежными КА; при наклонении большем iпред увеличивают эксцентриситет до еmin с установкой вектора Лапласа в направлении от Солнца и в оставшееся время до окончания срока активного существования коррекции вектора эксцентриситета не проводят; в отсутствие коллокации на этапе приведения проводят одновременные коррекции периода обращения и эксцентриситета с тем, чтобы текущий эксцентриситет стал равен устойчивому; при уменьшении наклонения до значения iпред проводят коррекции эксцентриситета с тем, чтобы етек был не более допустимого эксцентриситета при удержании КА по долготе (≡2угл.мин по долготе для областей стояния ±0,05°), при увеличении наклонения до значения iпред восстанавливают эксцентриситет до еуст с установкой вектора Лапласа в направлении на Солнце и в оставшееся время до окончания срока активного существования коррекции вектора эксцентриситета не проводят.
Суть способа заключаются в следующем.
1. Коллокация с геостационарными КА
Если учесть, что на интервале между траекторными измерениями 7 суток погрешность определения и прогнозирования положения вдоль орбиты δl составляет 4,5 км ([2] ОАО «ЭКА». Научно-технический отчет. Отработка технологии и оценка характеристик навигационно-баллистического обеспечения полетом КА 17Ф15М на этапе летных испытаний, М.,2010 г., стр.82), умножить ее на два (имеем ошибку определения положения КА пары) и прибавить 1 км (гарантия исключения всяких случайностей), получим гарантированную зону отчуждения обоих КА Sz = 10 км по всем опорным направлениям. Величина 


где Δλном - половина ширины номинальной (данной) области стояния по долготе;
δλопр=δl/rст - погрешность определения и прогнозирования движения КА вдоль
орбиты;
δλупр - степень свободы при управлении удержанием по долготе, порядка ±(0,01-0,015), получим востребованный позднее минимально допустимый эксцентриситет еmin для КА на геосинхронной 24-часовой орбите. Для областей стояния ±0,05° едоп≤0,0003, и emin≤0,0006. Важная величина, дающая возможность рассчитать начальный вектор эксцентриситета е0. До тех пор, пока наклонение орбиты геосинхронного КА не упадет с начальных (5-7,5)° (в зависимости от САС КА) до нескольких минут (например - 4,5 угл.мин для областей стояния по долготе ±(0,1-0,05°)), можно не учитывать колебания по долготе за счет наклонения и эксцентриситета. Последнее возможно ввиду того, что выход из номинальной области стояния по долготе на широтах, превышающих установленную норму для геостационарных КА, не следует считать нарушением международного регламента, поскольку в определенное время на витке геосинхронный КА находится в неоговоренном регламентом пространстве и реально никому не мешает.
На этапе приведения КА в заданную область стояния в самом щадящем режиме, когда только лишь гасится пассивный дрейф в эту область (~2°/сутки), вырабатывается импульс приращения скорости порядка 17 м/с. На создание эксцентриситета с нуля до (emin+2eуст)≈0,00150 требуется, исходя из формулы [3], К.Эрике «Космический полет», т.II, часть 1, стр.388, приращение скорости

где Δе=еmax=(еmin+2еуст)=0,0015;
V - скорость движения КА по круговой орбите, 3074 м/с.
Коррекции эксцентриситета, по необходимости, совмещаются с коррекциями периода обращения, поэтому энергозатраты на реализацию начального эксцентриситета самостоятельными не являются и общие энергозатраты на приведение не увеличивают.
2. Удержание геосинхронного КА относительно заданной точки стояния на тех же условиях, на которых удерживаются геостационарные КА, без коррекций наклонения вообще и с минимальными затратами на коррекции эксцентриситета в течение срока активного существования. За счет наклонения, уже большем 5 угл.мин, можно иметь большой эксцентриситет орбиты, что дает возможность вообще не проводить коррекции эксцентриситета (см.п.10, фиг.8).
Энергозатраты на коррекции эксцентриситета не являются существенными в общем топливном бюджете и их всегда, при условии не срочности исполнения этих коррекций, можно совмещать по времени с коррекциями периода обращения КА.
Введем понятие устойчивого эксцентриситета.
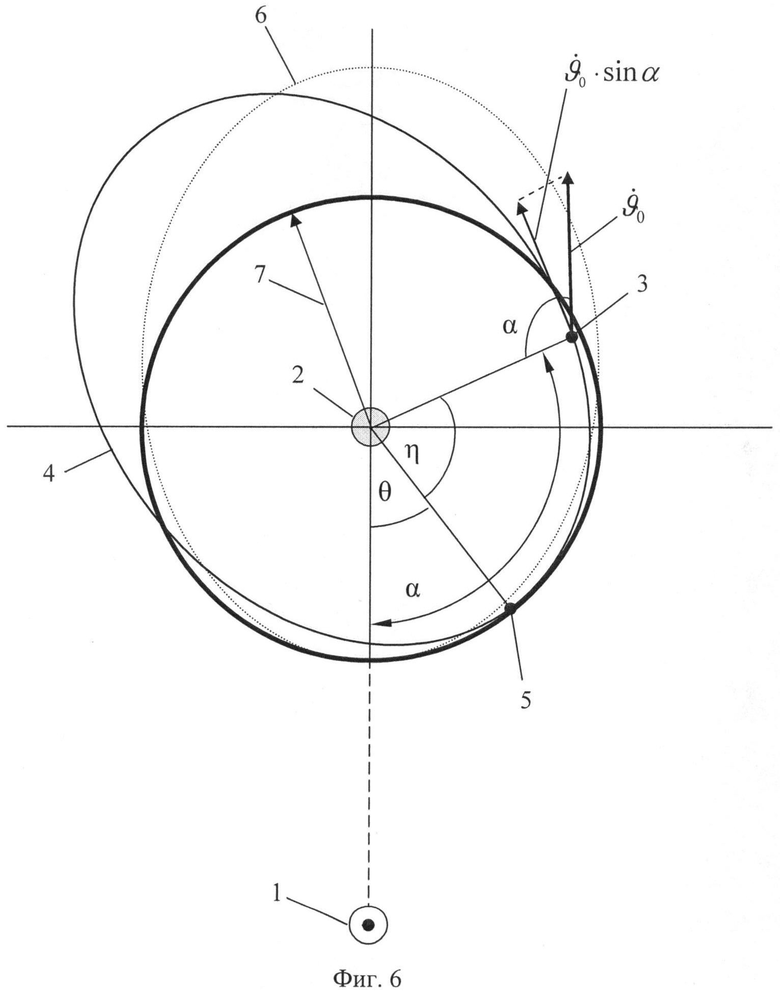
Влияние малого импульса скорости (приращения скорости за секунду) 


где ϑ - средняя скорость движения КА, 3074 м/с;
η = α - θ - истинная аномалия;
θ - угол между направлением на Солнце и на перигей орбиты КА.
Тогда, подставляя выражение η в (3) и используя формулы разности двух углов, получаем:
Первое слагаемое, как минимум, на два порядка меньше остальных и не является постоянным членом, тогда

При θ = 0

Аналогично рассуждая, будем иметь для скорости движения (аргумента широты) перигея:

При θ = 0

Далее,

где 

тогда
Интегрируем на сутках (на витке):
Дадим оценку

где S - мощность световой волны, падающей на 1 м2 поверхности тела, вт/м2;
А - коэффициент отражения (А=0 для абсолютно черного тела);
с - скорость света, км/с.
S=1,4·103вт/м2.
Значение А зависит от отражающей способности деталей конструкции КА и в контексте данного технического решения должно включать (условно) гравитационное воздействие Солнца как «±» относительно положения, когда вектор Лапласа направлен на Солнце. Для реальных КА на высоте стационарной орбиты значения А находятся в пределах [0,28-0,44]. Исходя из А = 0,44, будем иметь Р, равное 6,72·10-6н/м2. Поскольку сила светового давления F=S'·P, где S' - площадь миделевого сечения, то

Отношение 



Энергозатраты на поддержание еуст практически отсутствуют: каждый год необходимо проводить коррекцию эксцентриситета на величину его векового ухода Δe = 0,000052 за счет нецентральности гравитационного поля Земли. Это очень малая величина, соизмеримая с суточными уходами эксцентриситета за счет совокупного влияния всех пассивных возмущающих факторов, однако если вековой уход не компенсировать, текущий эксцентриситет к концу САС будет далек от устойчивого.
Реализация предлагаемого способа предполагает выполнение следующей последовательности операций:
1. Определяют начальные значения наклонения и долготы восходящего узла орбиты выведения.
Данная операция аналогична совокупной последовательности операций 1-4 прототипа.
2. Определяют величину устойчивого эксцентриситета для выводимого на орбиту геосинхронного КА.
Операция заключается в расчете еуст на основе формул (14', 15, 16) с учетом реальных данных по отражающей способности деталей конструкции КА (в основном панелей солнечных батарей), средней площади миделевого сечения и массы КА. Влияние гравитационного воздействия на КА Солнца можно не учитывать на годовом интервале, но по окончании годового интервала скорректировать положение перигея в направлении на Солнце. Скорректировать придется не более (4-5)°, что потребует не более 0,055 м/с, которые не превышают 2% топливного годового бюджета удержания по долготе при функционировании КА по целевому назначению и 0,09% топливного годового бюджета при сравнении с геостационарными КА, удерживаемых по широте (наклонению).
3. Определяют первое приближение величины минимального эксцентриситета, реализуемого на годовом интервале.
Величину минимального эксцентриситета еmin определяют из соотношения:

как сумму максимально допустимого эксцентриситета едоп при удержании КА по долготе при наклонении орбиты близком к нулю, рассчитанного по формуле (1), и отношения радиуса зоны отчуждения между КА в состоянии коллокации к радиусу геостационарной орбиты. Поскольку emin>eуст, центр полярной системы координат вынесен за большой круг годографа (см. п.5).
4. Проводят траекторные измерения.
Траекторные измерения проводят после выведения КА на геосинхронную орбиту. Эта операция - типовая на всем САС.
5. Определяют (строят) годограф изменения вектора эксцентриситета под действием светового давления.
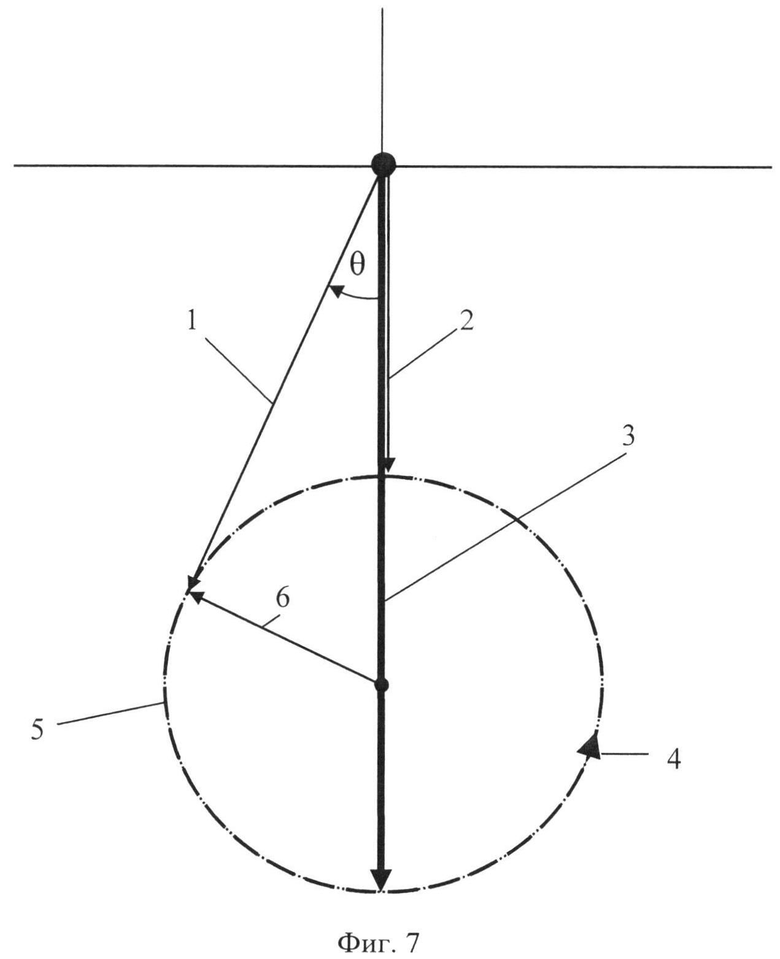
Принципиальная схема годографа приведена на фиг.7. Введены следующие обозначения:
1 - вектор е;
2 - вектор минимального эксцентриситета еmin, направлен на Солнце;
3 - вектор максимального эксцентриситета еmах, направлен на Солнце;
4 - указатель направления движения против часовой стрелки вектора еуст;
5 - большой круг, описываемый концами векторов е и еуст;
6 - текущий вектор еуст.
Большой круг годографа разделен на равные участки, представляющие временные интервалы (сутки, недели). Зная текущую дату и значение е, можно всегда сказать, когда будем иметь те или иные реальные значения эксцентриситета и угла θ отклонения вектора Лапласа (направления на перигей) от направления на Солнце.
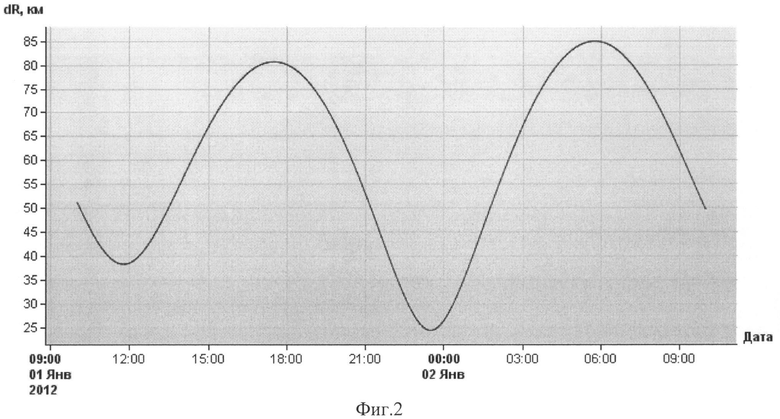
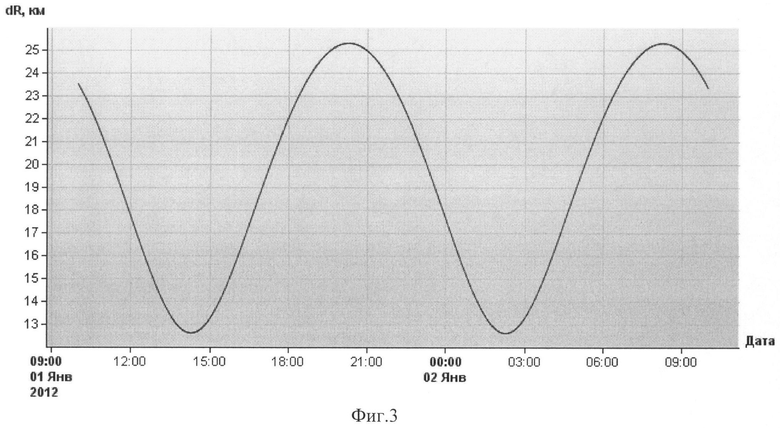
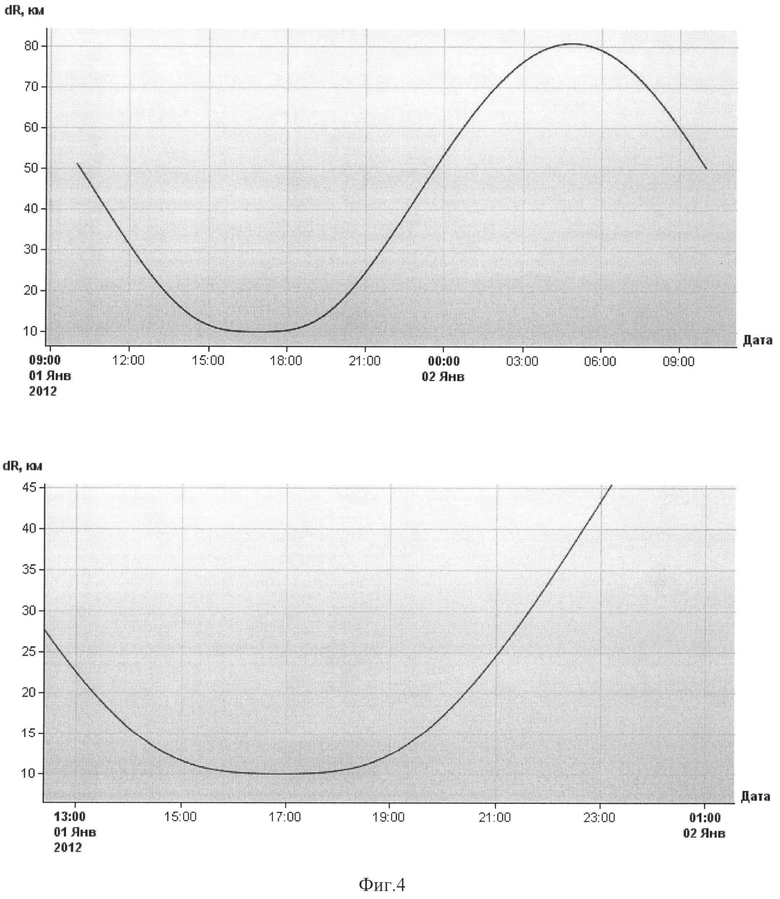
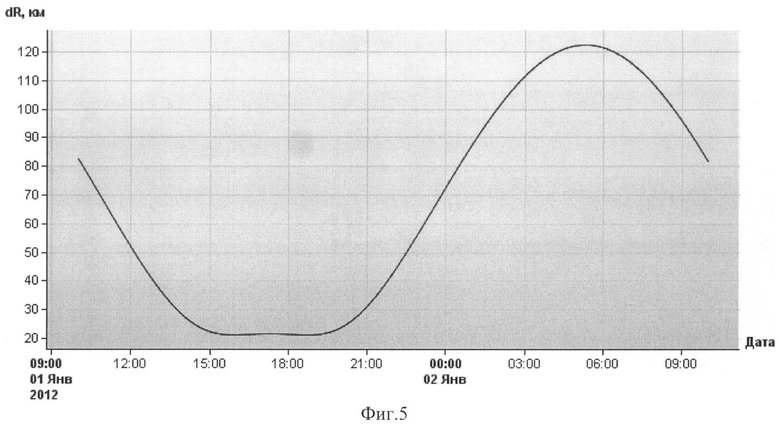
Соотношение emin/emax годографа гарантирует амплитуду Aθ = 48° колебаний угла θ (фиг.7) (колебания в пределах ±24° относительно нуля - начального направления на Солнце), что соответствует тем же колебаниям линии апсид относительно линии узлов, восходящий узел которой фиксирован в пространстве, согласно прототипу, сначала в районе 270°, а с середины САС - в районе 90°, благодаря выбору начальных параметров выведения (операция 1). Эти колебания соизмеримы с допуском на уход линии апсид от линии узлов орбиты КА, находящегося в состоянии коллокации с другими КА с момента приведения в точку стояния. В связи с этим уточним величину Δez для расхождения по аргументу широты перигея на 24°. На фиг.4, фиг.5 приведены наихудшие варианты расчета межспутниковых расстояний: фиг.4 - i1=30″; i2=30″ (величина наклонения роли не играет); Ω1=Ω2=0; ω1=336°; ω2=24°; e1=0,00068; е2=0,00030; фиг.5 - Ω1=Ω2=0; ω1=336°; ω2=90°; e1=0,00068; е2=0,00030, при которых, однако, межспутниковое расстояние Sz больше 10 км. Окончательно будем иметь Δеz = 0,00038 (что оптимально для функционирования при диаметрально разнесенных перигеях орбит: e1=е2=0,00019 и (Ω+ω)1=(Ω+ω)2±180°), emin=0,00068, emax≈0,00158 (в зависимости от конкретного значения еуст), или, если быть более точным (см. стр.7, 
6. Определяют срок «0», в течение которого реализованное начальное наклонение уменьшится до нуля.
Это большой срок, исчисляемый годами. Хотя нас на самом деле интересует срок, в течение которого наклонение уменьшится до известного значения iпред, составляющего несколько угловых минут, нет необходимости его определять на начальном этапе функционирования КА, поскольку его все равно приходится уточнять.
7. Определяют оптимальное значение вектора начального эксцентриситета е0 на начальную эпоху.
Годографом на момент начала функционирования КА по целевому назначению определены два значения: еmin, еmax, расходящихся на 180° и удовлетворяющих условию совмещения линии апсид с радиус-вектором Солнца.
Из этих двух векторов эксцентриситета выбирают один - е0, эволюция которого в конце срока «0» гарантирует минимальное расхождение между текущим вектором е и еmin и потребует проведение коррекции текущего вектора эксцентриситета до номинального для коллокации в заданной области стояния значения (еном) с наименьшими энергозатратами.
Пункты 5-7 вероятно потребуют ограничений на даты старта. Запуски КА возможно будут проводиться в «окна» зимнего и летнего солнцестояний. Однако выставление ограничений на даты старта по тем или иным соображениям - обычная практика. Итак, значение е0 снимают с годографа.
8. На этапе приведения КА в заданную область стояния одновременными коррекциями периода обращения и эксцентриситета доводят фактическое текущее значение эксцентриситета до расчетного е0, тем самым совмещая линию апсид с линией узлов.
9. На этапе удержания проводят уточнение времени перехода КА в режим функционирования на геостационарной орбите.
Уточнение проводят ближе к окончанию срока «0».
10. Определяют предельное значение наклонения iпред, при котором выход по широте за предельное значение для геостационарных КА осуществляется на границе номинальной области стояния по долготе.
Наклонение iпред необходимо знать и при достижении наклонения значения iпред переходить в режим удержания (возможно коллокации) на условиях активного существования геостационарных КА, поскольку, если не в заданной области стояния по широте и долготе, то в смежных областях находятся (могут находиться) геостационарные КА, и существует норма (регламент) ширины области стояния на геостационарной орбите. Для произвольных областей стояния относительно центральной точки

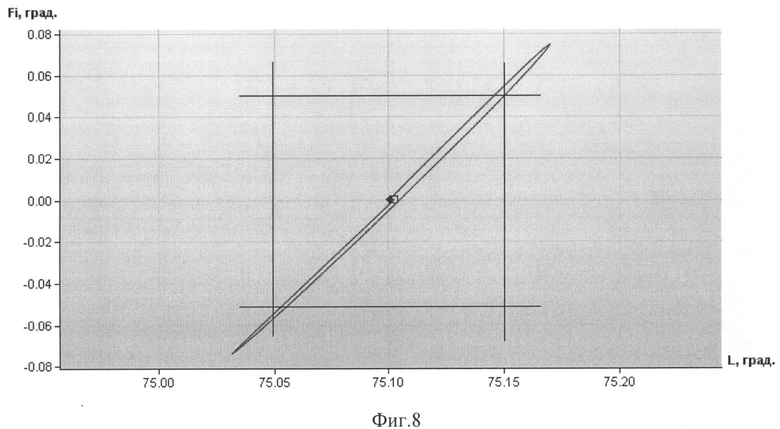
где ±Δφном и ±Δλном - соответственно номинальные области стояния КА по широте и долготе. Первое слагаемое прямо следует из геометрии общей области стояния, второе учитывает колебания по долготе за счет наличия наклонения орбиты. Для области ±(0,1-0,05)° iпред=4,5 угл.мин (см. фиг.8).
Коррекции гринвичской долготы восходящего узла (то же - коррекции периода обращения КА) планируют так, чтобы график изменения вектора эксцентриситета согласно годографу строго соблюдался.
11. При уменьшении текущего наклонения до предельного значения проводят коррекцию вектора эксцентриситета.
Текущий вектор эксцентриситета переводят в номинальный вектор еном.
12. Проводят активную коллокацию КА (в отличие от пассивной коллоакации, когда совмещение линии узлов и линии апсид в пределах ±24° происходило автоматически) без взаимодействия с центрами управления смежными КА.
Как правило, активную коллокацию КА проводят по согласованным схемам. Все схемы - аналоги сводятся к равноудалению точек прицеливания векторов еn [en,(Ω+ω)n] (n=1,2,…) и in [in,Ωn] (n=1,2,…) в соответствующих фазовых плоскостях КА и поддержанию концов векторов еn и in внутри соответствующих областей выбранных радиусов, центрами которых являются соответствующие точки прицеливания. Идеальным вариантом считается для двух КА разнесение долгот восходящих узлов (Ωn) и прямых восхождений перигеев (Ω+ω)n точек прицеливания на 180°, причем аргументы широты перигеев КА должны быть близки нулю. Для трех КА цифру 180 заменяют на 120.
Операция 12 является существенным и отличительным признаком изобретения. Суть ее сводится к следующему:
а) для цели активной коллокации нет необходимости заниматься коррекциями векторов наклонения: ни на геостационарных КА, ни на геосинхронном КА, достаточно поддерживать линию апсид орбиты только геосинхронного КА в заданных пределах относительно линии узлов его орбиты проведением коррекций вектора эксцентриситета, т.е.

либо

а, поскольку величина Δez≥едоп и больше еном, то оптимальным вариантом активной коллокации будет разнесение перигеев орбит двух КА на 180° (фиг.3, стр.7), когда

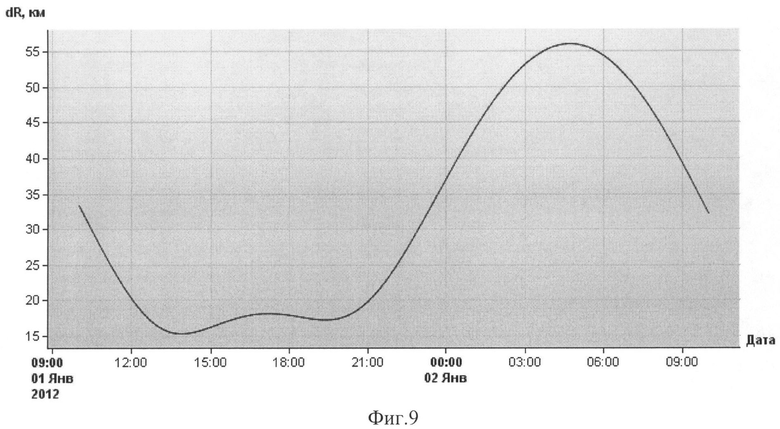
(на фиг.9: i1=i2=1', Ω1=90°, Ω2=0°, ω1=45°, ω2=315°, e1=0,00019, е2=0,00019),
притом что активная коллокация актуальна в течение не более двух месяцев;
б) нет необходимости во взаимодействии с центрами управления смежными КА, поскольку относительно простую задачу разнесения векторов эксцентриситета (или векторов Лапласа) можно решить мониторингом данных по тактике и стратегии удержания смежных КА (например, с помощью международной системы слежения NORAD) и адаптацией управления геосинхронным КА к этим данным, что может оказаться более эффективным, чем пытаться наладить тесный контакт с центрами управления смежными КА.
13. Как только наклонение станет больше iпред, увеличивают эксцентриситет до значения еmin с установкой вектора Лапласа в направлении от Солнца и в оставшееся до окончания САС время коррекции вектора эксцентриситета не проводят.
14. В отсутствие коллокации на этапе приведения проводят одновременные коррекции периода обращения и эксцентриситета с тем, чтобы текущий эксцентриситет стал равен устойчивому.
15. При уменьшении наклонения до значения iпред проводят коррекции эксцентриситета с тем, чтобы текущий эксцентриситет был не более допустимого при удержании КА по долготе.
16. При увеличении наклонения до значения iпред восстанавливают эксцентриситет до устойчивого значения с установкой вектора Лапласа в направлении на Солнце и в оставшееся до окончания САС время коррекции вектора эксцентриситета не проводят.
Отметим, что согласно прототипу начальное и конечное значения долготы восходящего узла орбиты КА составляют соответственно 270° и 90°, более того, переход от Ω0 к Ωк происходит скачкообразно, поэтому совмещение на всем САС линии узлов и линии апсид геосинхронного КА (действие по п.13 соответствует данной установке) гарантирует успешное сосуществование нескольких КА в заданной области стояния.
Отметим еще раз, что энергозатраты на коррекции эксцентриситета самостоятельными не являются и общие энергозатраты не увеличивают.
Предлагаемый способ удержания КА по долготе на геосинхронной 24-часовой орбите обеспечивает:
1 - удержание по долготе восходящего узла орбиты без энергозатрат на коррекции эксцентриситета;
2 - гарантированную коллокацию КА с другими КА в области рабочей точки стояния по долготе;
3 - сокращение на порядок энергозатрат на удержание против геостационарных КА за счет полного исключения коррекций наклонения;
4 - принципиальную альтернативу геостационарной орбите.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОНОМНОЙ КОЛЛОКАЦИИ НА ОКОЛОСТАЦИОНАРНОЙ ОРБИТЕ | 2018 |
|
RU2703696C1 |
| СПОСОБ МОНИТОРИНГОВОЙ КОЛЛОКАЦИИ НА ГЕОСТАЦИОНАРНОЙ ОРБИТЕ | 2013 |
|
RU2558959C2 |
| СПОСОБ АВТОНОМНОЙ КОЛЛОКАЦИИ НА ГЕОСТАЦИОНАРНОЙ ОРБИТЕ | 2013 |
|
RU2559371C2 |
| СПОСОБ АВТОНОМНОЙ КОЛЛОКАЦИИ НА ОКОЛОСТАЦИОНАРНОЙ ОРБИТЕ | 2021 |
|
RU2768994C1 |
| СПОСОБ МОНИТОРИНГОВОЙ КОЛЛОКАЦИИ НА ГЕОСТАЦИОНАРНОЙ ОРБИТЕ | 2019 |
|
RU2721812C1 |
| СПОСОБ АВТОНОМНОЙ КОЛЛОКАЦИИ НА ОКОЛОСТАЦИОНАРНОЙ ОРБИТЕ | 2019 |
|
RU2716394C1 |
| СПОСОБ АВТОНОМНОЙ КОЛЛОКАЦИИ НА ГЕОСТАЦИОНАРНОЙ ОРБИТЕ | 2019 |
|
RU2721813C1 |
| СПОСОБ КОЛЛОКАЦИИ НА ГЕОСТАЦИОНАРНОЙ ОРБИТЕ | 2020 |
|
RU2729347C1 |
| СПОСОБ КОЛЛОКАЦИИ ПРИ ПЕРЕВОДЕ ГЕОСТАЦИОНАРНОГО КОСМИЧЕСКОГО АППАРАТА НА ДРУГУЮ ДОЛГОТУ СТОЯНИЯ И УВОДЕ ЕГО НА ОРБИТУ ЗАХОРОНЕНИЯ | 2022 |
|
RU2786680C1 |
| СПОСОБ ПРИВЕДЕНИЯ НА ЗАДАННУЮ ОРБИТАЛЬНУЮ ПОЗИЦИЮ И ПЕРЕВОДА НА НОВУЮ ОРБИТАЛЬНУЮ ПОЗИЦИЮ ГЕОСТАЦИОНАРНОГО КОСМИЧЕСКОГО АППАРАТА | 2022 |
|
RU2788555C1 |
Изобретение относится к управлению движением космического аппарата (КА) и, конкретно, к удержанию геосинхронного КА в заданной области стояния и коллокации с другими геостационарными КА. Способ включает определение и коррекцию начальных наклонений и долготы восходящего узла орбиты выведения с учетом эпохи запуска КА на орбиту и срока его активного существования. При этом уточняют время начала функционирования на геостационарной орбите, когда наклонение орбиты КА достигнет предельно допустимого значения iпред. Последнее отвечает предельному выходу по широте на границе номинальной области стояния КА по долготе. Определяют значения устойчивого и минимального эксцентриситетов. Корректируют вектор эксцентриситета так, чтобы он равнялся номинальному для коллокации КА, а линия апсид орбиты КА совпала с линией узлов. Проводят активную коллокацию КА в период изменения наклонения от 0 до iпред без взаимодействия с центрами управления смежными КА. При наклонении, большем iпред, увеличивают эксцентриситет до минимального с установкой вектора Лапласа в направлении от Солнца. При этом до окончания срока активного существования КА коррекции вектора эксцентриситета не проводят. При наклонениях, меньших iпред, вектор эксцентриситета равен по модулю и максимально разнесен относительно векторов эксцентриситета других КА. Техническим результатом изобретения является уменьшение энергозатрат на удержание в области стояния и коллокацию геостационарных КА. 9 ил.
Способ удержания космического аппарата (КА) на геосинхронной 24-часовой орбите, включающий определение начальных параметров наклонения и долготы восходящего узла орбиты выведения с учетом эпохи запуска КА на орбиту и срока его активного существования, определение нового значения начального наклонения уменьшением прежнего значения на величину максимальной ошибки выведения по наклонению, прогнозирование расчетным путем значения наклонения орбиты КА на конец срока активного существования при максимальных ошибках выведения по наклонению и долготе восходящего узла орбиты, определение начальных значений наклонения и долготы восходящего узла, при которых максимальное реализованное начальное наклонение будет равно максимальному конечному наклонению в конце срока активного существования, отличающийся тем, что определяют величину устойчивого эксцентриситета е уст для выводимого КА, определяют предварительную величину минимального эксцентриситета е min как сумму максимально допустимого эксцентриситета при удержании КА по долготе при нулевом наклонении на геостационарной орбите и отношения радиуса зоны отчуждения между КА, занимающими одну и ту же рабочую позицию на орбите, к радиусу геостационарной орбиты, определяют годограф изменения вектора эксцентриситета под действием светового давления в полярной системе координат [е,θ], где θ - угол между направлениями на Солнце в начальную эпоху (дату окончания приведения в область стояния) и на перигей орбиты КА, полярная ось направлена из центра Земли на Солнце и включает радиус-вектор е min, при котором θ равно нулю, полярное расстояние равно эксцентриситету, вектор полярного расстояния в течение года описывает окружность радиуса еуст, и, зная амплитуду колебаний угла θ, уточняют величину еmin и годограф в целом; после выведения КА на геосинхронную 24-часовую орбиту и определения фактических параметров движения определяют срок «0», в течение которого фактическое начальное наклонение уменьшится до нуля; по указанному годографу определяют оптимальное значение вектора начального эксцентриситета е 0 на начальную эпоху, при котором линия апсид совмещена с радиус-вектором Солнца, и циклические годовые эволюции вектора е [е,θ], в отсутствие негативного влияния на них активных сил, гарантируют в конце срока «0» минимальное расхождение между векторами е и е min, на этапе приведения КА в заданную область стояния одновременными коррекциями периода обращения и эксцентриситета доводят фактическое текущее значение вектора эксцентриситета до расчетного е 0, на этапе удержания, ближе к окончанию срока «0» проводят уточнение времени перехода в режим функционирования на геостационарной орбите, когда наклонение орбиты КА достигнет предельно допустимого наклонения iпред, при котором выход по широте за предельное значение для геостационарных КА осуществляется на границе номинальной области стояния по долготе, проводят коррекцию вектора эксцентриситета с целью, чтобы эксцентриситет равнялся номинальному для коллокации КА в заданной области стояния, а линия апсид орбиты геосинхронного КА совпала с линией узлов орбиты, в течение времени, пока наклонение производит эволюции в диапазоне [0,iпред], проводят активную коллокацию КА без взаимодействия с центрами управления смежными КА, при наклонении, большем iпред, увеличивают эксцентриситет до е min с установкой вектора Лапласа в направлении от Солнца и в оставшееся время до окончания срока активного существования коррекции вектора эксцентриситета не проводят, в отсутствие коллокации на этапе приведения проводят одновременные коррекции периода обращения и эксцентриситета с тем, чтобы текущий эксцентриситет стал равен устойчивому, при уменьшении наклонения до значения iпред проводят коррекции эксцентриситета с тем, чтобы е тек был не более допустимого эксцентриситета при удержании КА по долготе.
| Г.М.ЧЕРНЯВСКИЙ, В.А.БАРТЕНЕВ, В.А.МАЛЫШЕВ | |||
| Управление орбитой стационарного спутника | |||
| М., Машиностроение, 1984, с.42, 43, 134-136 | |||
| PATTINSON L | |||
| EUTELSAT Satellite Collocation | |||
| Приспособление в пере для письма с целью увеличения на нем запаса чернил и уменьшения скорости их высыхания | 1917 |
|
SU96A1 |
| СПОСОБ УПРАВЛЕНИЯ КЛАСТЕРОМ НАХОДЯЩИХСЯ НА ГЕОСТАЦИОНАРНОЙ ОРБИТЕ СПУТНИКОВ (ВАРИАНТЫ) | 2004 |
|
RU2284950C2 |
| СПОСОБЫ РАБОТЫ СПУТНИКОВОЙ КОММУНИКАЦИОННОЙ СИСТЕМЫ, СПОСОБ УПРАВЛЕНИЯ ЕЕ РАБОТОЙ И СИСТЕМА УПРАВЛЕНИЯ СПУТНИКОВЫМ АНТЕННЫМ ОХВАТОМ НЕГЕОСТАЦИОНАРНОЙ ОРБИТАЛЬНОЙ МНОГОСПУТНИКОВОЙ СИСТЕМЫ | 1992 |
|
RU2121225C1 |
| US 5120007 A, 09.06.1992 | |||

