Изобретение относится к сельскохозяйственному машиностроению, а именно к машинам для уборки зерновых культур.
Известна электрогидравлическая система копирования рельефа почвы, которая может работать в режиме копирование рельефа поля с поддержанием заданного давления. Этот режим предназначен для работы на минимальной высоте среза, например, при уборке полеглых или низкорослых культур. Днище жатки скользит по поверхности поля и автоматически выполняются подъем/опускание для компенсации (выравнивание текущего и запомненного) давления (Комбайн зерноуборочный самоходный РСМ-142 «ACROS». Инструкция по эксплуатации и техническому обслуживанию РСМ-142 ИЭ. Версия 10, - с. 225 - 226).
Недостатком данной системы является невозможность учета фактора неровности агрофона при подаче хлебной массы к молотильно-сепарирующему устройству комбайна.
Известен датчик неровной дороги, который расположен в моторном отсеке на стойке передней подвески. Датчик предназначен для измерения амплитуды колебаний кузова автомобиля. Принцип его действия основан на пьезоэффекте. Возникающая при движении автомобиля по неровной дороге переменная нагрузка оказывает влияние на угловую скорость вращения коленчатого вала. Созданные при этом колебания частоты вращения коленчатого вала похожи на те колебания, которые возникают при пропусках воспламенения. Для исключения этой ошибки контроллер при превышении сигнала датчика неровной дороги определенного порога отключает функцию диагностики пропусков воспламенения. (ЭСУД автомобилей семейства LADA KALINA, LADA 110 и LADA NIVA с контроллером М7.9.7 ЕВРО-3 - устройство и диагностика / Козлов П.Л., Куликов А.В., Рекунов А.Е., Христов П.Н., Боюр В.С, Зимин В.А. 2006. - с. 18).
Недостатком датчика является отсутствие возможности его приспособленности и применения в работе зерноуборочного комбайна и, в частности, наклонной камеры.
За прототип выбрана автоматическая система контроля загрузки наклонной камеры зерноуборочного комбайна, состоящая из пьезоэлектрических датчиков, усилителя-формирователя, при этом к системе дополнительно подключены два компаратора, блок управления и дисплей, при этом электрические сигналы к компараторам поступают от двух отдельно друг от друга установленных пьезоэлектрических датчиков через усилитель-формирователь, а обработанные компараторами электрические сигналы поступают на блок управления и выводятся через него на дисплей в виде двух осциллограмм, связь между элементами системы осуществляется посредством электрических проводов (патент RU № 2711805, опубл. 22.01.2020 Бюл. № 3).
Недостатком данной системы является невозможность учета фактора неровности агрофона при контроле равномерности подачи хлебной массы к молотильно-сепарирующему устройству комбайна.
Задача изобретения - учет неровностей агрофона при контроле подачи хлебной массы к молотильно-сепарирующему устройству зерноуборочного комбайна.
Технический результат - повышение информативной точности контроля подачи хлебной массы к молотильно-сепарирующему устройству зерноуборочного комбайна.
Указанный технический результат при осуществлении изобретения достигается автоматической системой контроля загрузки наклонной камеры зерноуборочного комбайна, состоящей из пьезоэлектрических датчиков, усилителя-формирователя, двух компараторов, блока управления и дисплея, при этом к блоку управления дополнительно подключены два датчика неровной дороги, которые при превышении допустимых неровностей поверхности агрофона отключают прием сигналов от компараторов блоком управления и на дисплее изменяется вид осциллограмм, связь между элементами системы осуществляется посредством электрических проводов.
За счет работы этой системы, оператор может учитывать фактор неровности агрофона при контроле величины подачи хлебной массы к молотильно-сепарирующему устройству зерноуборочного комбайна.
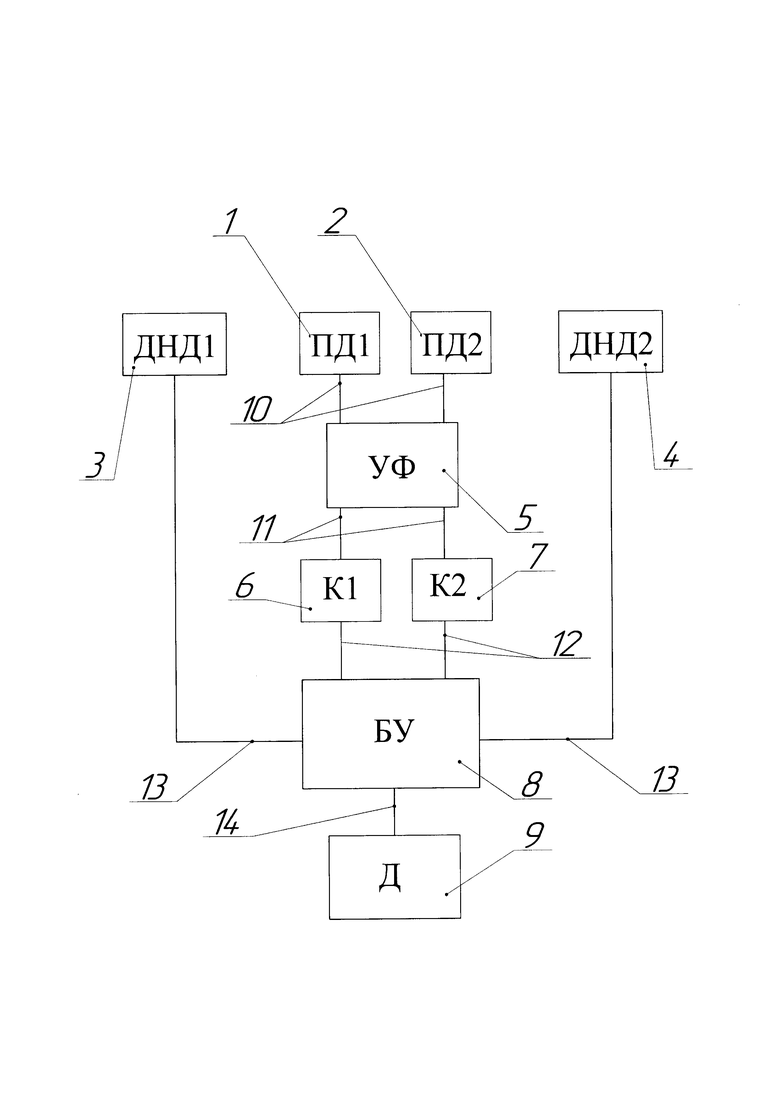
На фиг. представлена функциональная схема автоматической системы контроля загрузки наклонной камеры зерноуборочного комбайна.
Автоматическая система контроля загрузки наклонной камеры зерноуборочного комбайна (см. фиг.) состоит из пьезоэлектрических датчиков 1 (ПД1) и 2 (ПД2), датчиков неровной дороги 3 (ДНД1) и 4 (ДНД2), усилителя-формирователя 5 (УФ), компараторов 6 (К1) и 7 (К2), блока управления 8 (БУ), дисплея 9 (Д), электрических проводов 10, 11, 12, 13 и 14.
Автоматическая система контроля загрузки наклонной камеры зерноуборочного комбайна работает следующим образом (см. фиг.). Сигналы от датчиков 1 (ПД1), 2 (ПД2) поступают на усилитель-формирователь 5 (УФ), затем обрабатываются компараторами 6 (К1) и 7 (К2), которые сравнивают обработанные выходные сигналы датчиков 1 (ПД1) и 2 (ПД2) с переменными опорными значениями уровней, формируемых на основании предыдущих выходных сигналов этих датчиков. Далее эти сигналы от компараторов 6 (К1) и 7 (К2) поступают на блок управления 8 (БУ) и выводятся через него на дисплей 9 (Д) в виде двух осциллограмм. При превышении допустимого сигнала от датчиков неровной дороги 3 (ДНД1) и 4 (ДНД2), определяемого допустимыми неровностями поверхности агрофона, отключается прием сигналов от компараторов 6 (К1) и 7 (К2) блоком управления 8 (БУ) и на дисплее 9 (Д) изменяется вид осциллограмм, что является сигналом оператору для изменения подачи хлебной массы к молотильно-сепарирующему устройству, например, за счет снижения скорости движения зерноуборочного комбайна. Связь между элементами системы осуществляется посредством электрических проводов 10, 11, 12, 13 и 14.
Таким образом, заявленная автоматическая система контроля загрузки наклонной камеры зерноуборочного комбайна, позволит учитывать неровности агрофона при контроле подачи хлебной массы к молотильно-сепарирующему устройству зерноуборочного комбайна.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическая система контроля загрузки наклонной камеры зерноуборочного комбайна | 2020 |
|
RU2747155C1 |
| Автоматическая система контроля загрузки наклонной камеры зерноуборочного комбайна | 2019 |
|
RU2711805C1 |
| Автоматическая система контроля и управления частотой вращения вентилятора зерноуборочного комбайна | 2022 |
|
RU2783603C1 |
| Автоматическая система контроля и управления настройками рабочих органов молотильно-сепарирующего устройства | 2018 |
|
RU2703436C1 |
| АВТОМАТИЧЕСКАЯ СИСТЕМА КОНТРОЛЯ И УПРАВЛЕНИЯ НАСТРОЙКАМИ РАБОЧИХ ОРГАНОВ МОЛОТИЛЬНО-СЕПАРИРУЮЩЕГО УСТРОЙСТВА | 2015 |
|
RU2591133C1 |
| Автоматическая система контроля и управления настройками рабочих органов молотильно-сепарирующего устройства | 2023 |
|
RU2800598C1 |
| Автоматическая система контроля и управления настройками рабочих органов молотильно-сепарирующего устройства | 2022 |
|
RU2781905C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЗАГРУЗКИ ЗЕРНОУБОРОЧНОГО КОМБАЙНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2564865C1 |
| СПОСОБ УПРАВЛЕНИЯ ЗАГРУЗКОЙ ЗЕРНОУБОРОЧНОГО КОМБАЙНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2312485C2 |
| АВТОМАТИЧЕСКАЯ СИСТЕМА КОНТРОЛЯ И УПРАВЛЕНИЯ ЧАСТОТОЙ ВРАЩЕНИЯ ВЕНТИЛЯТОРА | 2013 |
|
RU2544929C1 |
Изобретение относится к сельскому хозяйству. Автоматическая система контроля загрузки наклонной камеры зерноуборочного комбайна состоит из пьезоэлектрических датчиков, усилителя-формирователя, двух компараторов, блока управления и дисплея. К блоку управления дополнительно подключены два датчика неровной дороги, которые при превышении допустимых неровностей поверхности агрофона отключают прием сигналов от компараторов блоком управления и на дисплее изменяется вид осциллограмм. Связь между элементами системы осуществляется посредством электрических проводов. Обеспечивается повышение информативной точности контроля подачи хлебной массы к молотильно-сепарирующему устройству зерноуборочного комбайна. 1 ил.
Автоматическая система контроля загрузки наклонной камеры зерноуборочного комбайна, состоящая из пьезоэлектрических датчиков, усилителя-формирователя, двух компараторов, блока управления и дисплея, отличающаяся тем, что к блоку управления дополнительно подключены два датчика неровной дороги, которые при превышении допустимых неровностей поверхности агрофона отключают прием сигналов от компараторов блоком управления и на дисплее изменяется вид осциллограмм, связь между элементами системы осуществляется посредством электрических проводов.
| Автоматическая система контроля загрузки наклонной камеры зерноуборочного комбайна | 2019 |
|
RU2711805C1 |
| САМОХОДНАЯ УБОРОЧНАЯ МАШИНА С ЖАТКОЙ И СПОСОБ УПРАВЛЕНИЯ ЖАТКОЙ | 2013 |
|
RU2630230C2 |
| Регулятор загрузки рабочих органов уборочных сельскохозяйственных машин | 1983 |
|
SU1134132A1 |
| DE 4035470 A1, 29.05.1991 | |||
| US 2022053693 A1, 24.02.2022. | |||
