Изобретение относится к испытательной технике, а именно к стендам испытания электродвигателей с различной высотой оси вращения и различным конструктивным исполнением по способу монтажа – на лапах и фланцем, и может быть применено в заводских, учебных или исследовательских лабораториях.
Известен классический способ установки электродвигателей с различной высотой оси вращения и конструктивным исполнением на станине или раме с помощью опор, подставки или кронштейна [Сибикин Ю.Д. Монтаж, эксплуатация и ремонт электрооборудования промышленных предприятий и установок: Учеб. пособие для проф. учеб. заведений / Ю.Д. Сибикин, М. Ю. Сибикин. – М.: «Высшая школа», 2003. – 462 с.: ил.]. При установке электродвигателей на раме, электродвигатель с конструктивным исполнением на лапах устанавливают на лапах на раму, а электродвигатель фланцевого исполнения устанавливают на раму с помощью опор, подставки или кронштейна, валы электродвигателей соединяют муфтой.
Недостатком данного способа является сложность конструкции и высокие массогабаритные показатели.
Наиболее близким по технической сущности к заявленному изобретению является способ установки электродвигателей с различной высотой оси вращения и конструктивным исполнением на раме с помощью специальных опор, реализованный в измерительном стенде [Пат. RU 182115 U1, 03.08.2018]. При установке электродвигателей на раме электродвигатель с конструктивным исполнением на лапах устанавливают на лапах на раму, а электродвигатель фланцевого исполнения устанавливают на раму с помощью специальных опор. Валы электродвигателей соединяют муфтой, а вращающиеся части закрывают кожухом для защиты от контакта ними.
Недостатком данного способа является сложность конструкции, необходимость изготовления специальных опор, высокие массогабаритные показатели, наличие дополнительных защитных кожухов для защиты от контакта с движущимися частями электродвигателей, необходимость индивидуальной регулировки положения электродвигателей для обеспечения соосности валов.
Целью предлагаемого изобретения является повышение технических и эксплуатационных показателей стенда, достигаемое соединением корпусов электродвигателей соединительным устройством, которое устанавливается на подшипниковый щит электродвигателя с конструктивным исполнением на лапах, и закрепляется к корпусу указанного электродвигателя с использованием шпилек в существующие места крепления подшипникового щита.
Ожидаемый технический результат – снижение количества элементов и упрощение конструкции, уменьшение массогабаритных показателей, наличие защиты от контакта с движущимися частями электродвигателей, обеспечение соосности валов электродвигателей с заданной точностью при изготовлении соединительного устройства, снижение динамических нагрузок, вызванных несоосностью валов двигателей, уменьшение времени выполнения монтажных работ.
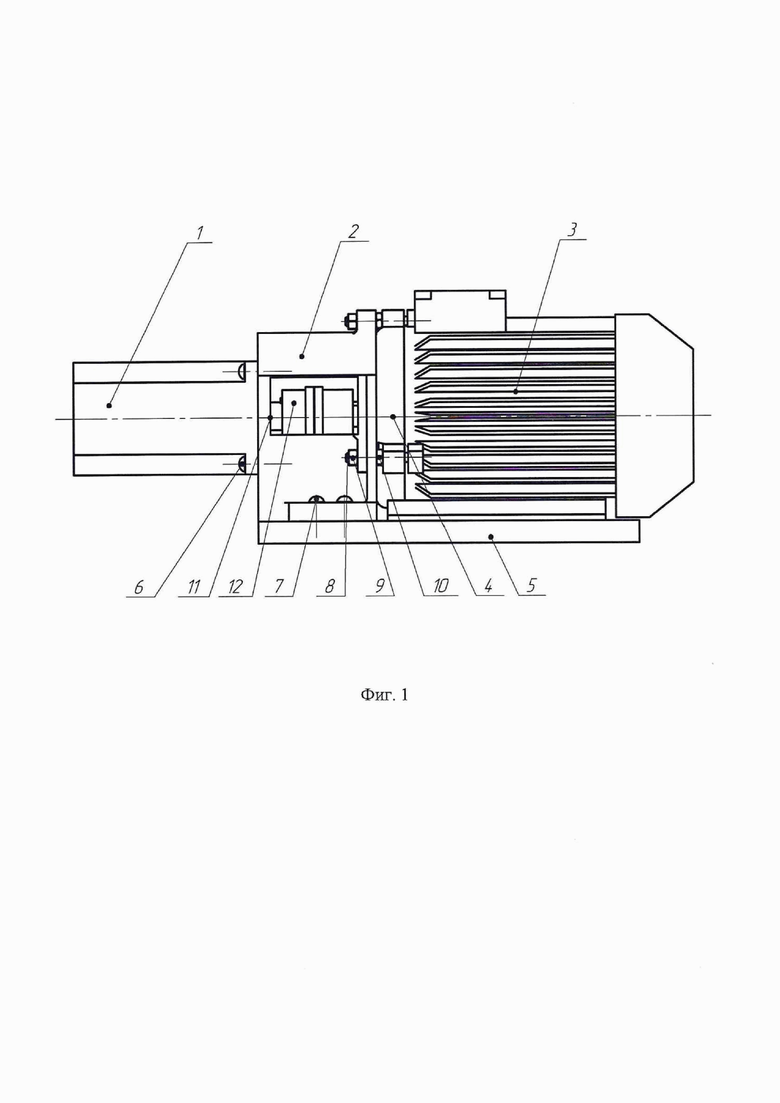
На Фиг. 1 представлен чертёж общего вида, иллюстрирующий способ соединения двух электродвигателей с разной высотой оси вращения и конструктивным исполнением по способу монтажа – на лапах и фланцем. Электродвигатель фланцевого исполнения (1) устанавливают в соединительное устройство (2) со стороны фланцевого соединения и крепят к соединительному устройству (2) болтовым соединением (6), на вал электродвигателя фланцевого исполнения (1) устанавливают полумуфту (12). Для крепления подшипникового щита (4) к корпусу электродвигателя с конструктивным исполнением на лапах (3) используют шпильки (8), которые закручивают в корпус указанного электродвигателя (3). На шпильки (8) устанавливают подшипниковый щит (4) и притягивают к корпусу электродвигателя с конструктивным исполнением на лапах (3) с помощью гаек (10). На вал электродвигателя с конструктивным исполнением на лапах (3) устанавливают полумуфту (12), затем на шпильки (8) устанавливают соединительное устройство (2) и притягивают его к корпусу подшипникового щита (4) электродвигателя с конструктивным исполнением на лапах (3) с помощью гаек (9), соединяют полумуфты (12) через смотровое окно (11), а основание соединительного устройства (2) крепят к раме (5), на которой установлен электродвигатель с конструктивным исполнением на лапах (3), с помощью болтового соединения (7). Использование шпилек (8) вместо болтов позволяет выполнить независимую установку подшипникового щита (4) электродвигателя с конструктивным исполнением на лапах (3) и соединительного устройства (2). Крепление гайками (10) обеспечивает прилегание плоскости соединительного устройства (2) к посадочной плоскости электродвигателя (3). Для посадки, сборки, смазки и регулировки полумуфт (12) используется смотровое окно (11).
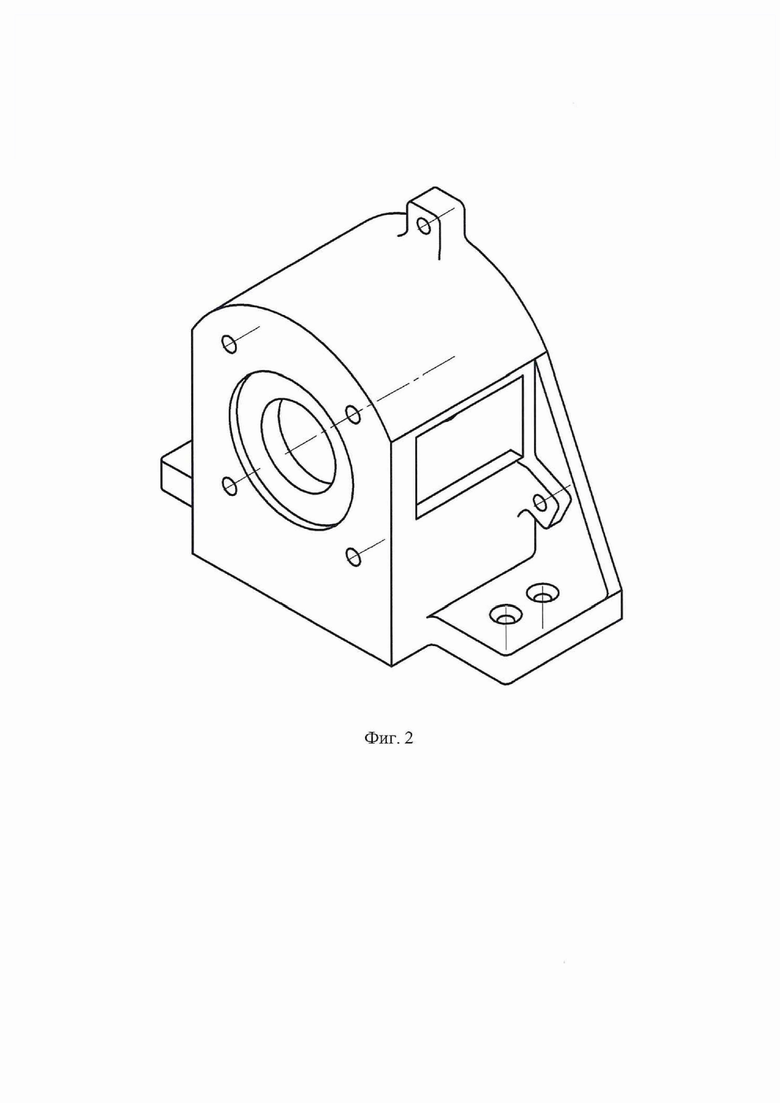
На Фиг. 2 представлено изометрическое изображение соединительного устройства, которое с одной стороны имеет плоскость с углублением и проушинами для надёжного и точного крепления к подшипниковому щиту электродвигателя с конструктивным исполнением на лапах, а с другой – имеет плоскость и углубление для соединения с фланцем электродвигателя фланцевого исполнения и отверстия для болтового соединения. Длина соединительного устройства выбирается с учётом длины выступающих концов валов электродвигателей и размера полумуфт. Соединительное устройство имеет опорную нижнюю плоскость с отверстиями для болтового соединения с рамой.
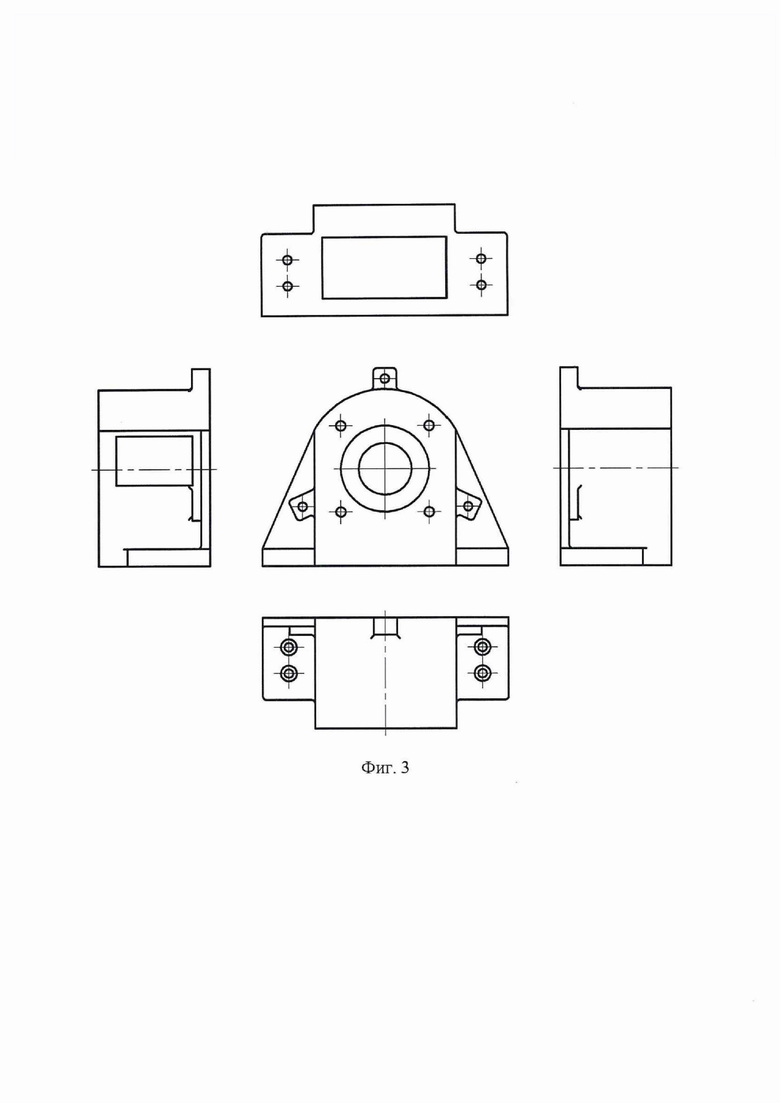
На Фиг. 3 представлен габаритный чертёж опытного образца устройства для соединения асинхронного электродвигателя с короткозамкнутым ротором марки АИР56А2У3 высотой оси вращения 65 мм с конструктивным исполнением на лапах, и бесщёточного электродвигателя постоянного тока марки 60BLF99 с фланцевым исполнением и высотой оси вращения 30 мм. Опытный образец соединительного устройства изготовлен из пластика на 3D-принтере с толщиной стенки 5 мм и имеет высокую прочность, точность изготовления, малую массу и габариты.
Опытный образец стенда, в котором соединение электродвигателей выполнено с помощью данного устройства, подтвердил все заявленные преимущества предлагаемого способа: уменьшение массогабаритных показателей при сохранении простоты конструкции, высокой прочности, жёсткости и точности соединения электродвигателей; обеспечение соосности валов электродвигателей с заданной точностью при изготовлении соединительного устройства; существенное снижение динамических нагрузок, вызванных несоосностью валов; уменьшение времени выполнения и простую технологию монтажных работ по соединению электродвигателей; отсутствие доступа к вращающимся частям электродвигателей для обеспечения безопасности эксплуатации.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАГИСТРАЛЬНЫЙ НЕФТЯНОЙ ЭЛЕКТРОНАСОСНЫЙ АГРЕГАТ И СПОСОБ УЛУЧШЕНИЯ ХАРАКТЕРИСТИК АГРЕГАТА | 2011 |
|
RU2484305C1 |
| МАГИСТРАЛЬНЫЙ ЭЛЕКТРОНАСОСНЫЙ АГРЕГАТ С КРЕПЛЕНИЯМИ К РАМЕ С ИСПОЛЬЗОВАНИЕМ ПОДВОДИМЫХ ОПОР И СПОСОБ УЛУЧШЕНИЯ ХАРАКТЕРИСТИК АГРЕГАТА | 2011 |
|
RU2484304C1 |
| ГОРИЗОНТАЛЬНАЯ МНОГОСТУПЕНЧАТАЯ СЕКЦИОННАЯ ЦЕНТРОБЕЖНАЯ НАСОСНАЯ УСТАНОВКА И СПОСОБ СБОРКИ НАСОСНОЙ УСТАНОВКИ | 2013 |
|
RU2529979C1 |
| ВЕНТИЛЯТОР ДЛЯ ПЕРЕМЕЩЕНИЯ ГОРЯЧИХ ГАЗОВ | 2014 |
|
RU2541076C1 |
| ЭЛЕКТРОДВИГАТЕЛЬ | 1992 |
|
RU2030059C1 |
| ПРОКАТНАЯ КЛЕТЬ С КОНСОЛЬНЫМИ ВАЛКАМИ | 1999 |
|
RU2189874C2 |
| УСТАНОВКА АГРЕГАТОВ НАСОСНЫХ ДИНАМИЧЕСКИХ, ВЕРТИКАЛЬНОГО ТИПА | 2023 |
|
RU2819369C1 |
| ПРИВОД ВЕРТИКАЛЬНОГО СКВАЖИННОГО ЦЕНТРОБЕЖНОГО НАСОСА | 2003 |
|
RU2238440C1 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА ВЕТОХИНА "ЭМВ" | 1994 |
|
RU2065656C1 |
| ЧЕРПАКОВЫЙ ЭЛЕКТРОНАСОС | 2006 |
|
RU2309296C1 |
Изобретение относится к испытательной технике. Технический результат – снижение количества элементов, упрощение конструкции, уменьшение массогабаритных показателей, наличие защиты от контакта с движущимися частями электродвигателей, обеспечение соосности валов электродвигателей с заданной точностью при изготовлении соединительного устройства, снижение динамических нагрузок, вызванных несоосностью валов двигателей и уменьшение времени выполнения монтажных работ. Способ заключается в использовании соединительного устройства, которое имеет с одного конца плоскость и углубление для крепления к фланцевому креплению электродвигателя фланцевого исполнения и отверстия для болтового соединения, с другого конца – плоскость с углублением и проушины для крепления шпильками в существующие места установки подшипникового щита электродвигателя с исполнением на лапах, на боковой поверхности – смотровое окно для посадки, сборки, смазки и регулировки соединительных полумуфт валов электродвигателей, а также опорную плоскость с отверстиями для болтового соединения с рамой электродвигателя с конструктивным исполнением на лапах. 2 н. и 1 з.п. ф-лы, 3 ил.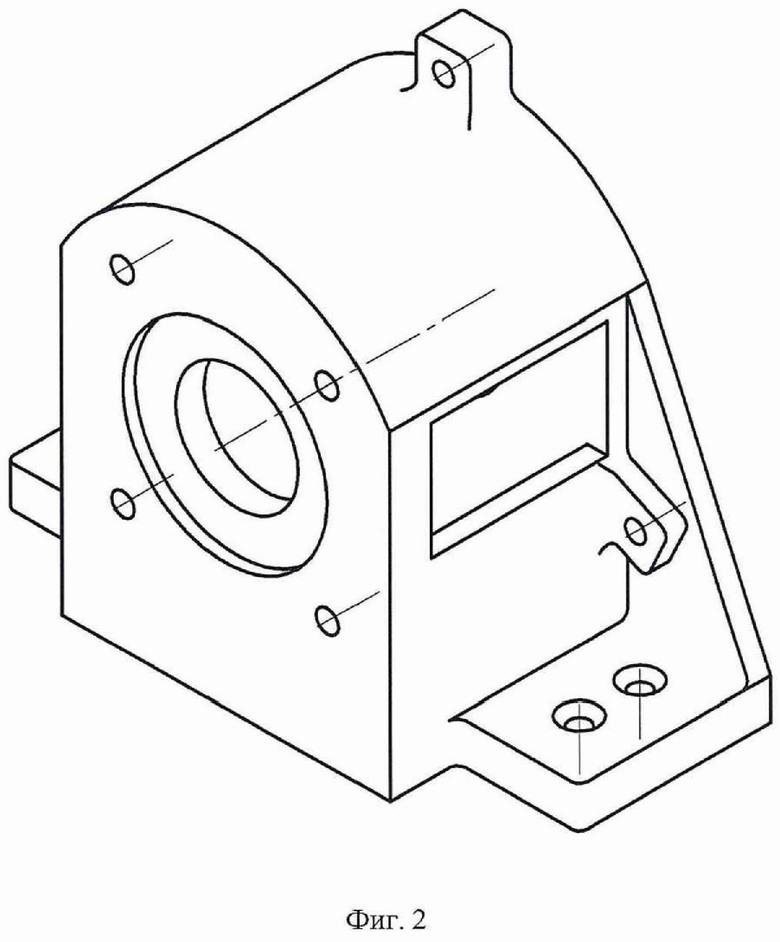
1. Способ соединения двух электродвигателей с разной высотой оси вращения и различным конструктивным исполнением по способу монтажа – на лапах и фланцем, состоящий в установке электродвигателя фланцевого исполнения фланцем к соединительному устройству, а электродвигателя с конструктивным исполнением на лапах - на лапах на раму, отличающийся тем, что электродвигатель фланцевого исполнения устанавливают в соединительное устройство со стороны фланцевого соединения и крепят к соединительному устройству болтовым соединением, на вал электродвигателя фланцевого исполнения устанавливают полумуфту, для крепления подшипникового щита к корпусу электродвигателя с конструктивным исполнением на лапах используют шпильки, которые закручивают в корпус указанного электродвигателя, на шпильки устанавливают подшипниковый щит и притягивают к корпусу электродвигателя с конструктивным исполнением на лапах с помощью гаек, на вал электродвигателя с конструктивным исполнением на лапах устанавливают полумуфту, затем на шпильки устанавливают соединительное устройство и притягивают его к корпусу подшипникового щита электродвигателя с конструктивным исполнением на лапах с помощью гаек, соединяют полумуфты через смотровое окно, а основание соединительного устройства крепят к раме, на которой установлен электродвигатель с конструктивным исполнением на лапах, с помощью болтового соединения.
2. Устройство для соединения двух электродвигателей с разной высотой оси вращения и различным конструктивным исполнением по способу монтажа – на лапах и фланцем, содержащее соединительное устройство, которое с одного конца имеет плоскость и углубление для крепления к фланцевому креплению электродвигателя фланцевого исполнения и отверстия для болтового соединения, с другого конца – плоскость с углублением и проушины для крепления шпильками в существующие места установки подшипникового щита электродвигателя с конструктивным исполнением на лапах, а также опорную плоскость с отверстиями для болтового соединения с рамой электродвигателя с конструктивным исполнением на лапах.
3. Устройство по п. 2, отличающееся тем, что имеет смотровое окно.
| АППАРАТ ДЛЯ НЕПРЕРЫВНОГО ПОЛУЧЕНИЯ ПОЛИМЕРНЫХ МАТЕРИАЛОВ ГЕТЕРОГЕННОЙ ПОЛИКОНДЕНСАЦИЕЙ | 0 |
|
SU182115A1 |
| ИНДИКАТОРНОЕ УСТРОЙСТВО | 0 |
|
SU397790A1 |
| УСТРОЙСТВО для СУПЕРФИНИШИРОВАНИЯ | 0 |
|
SU217994A1 |
| Устройство для синхронизации | 1932 |
|
SU35283A1 |
| US 5454457 A1, 03.10.1995. | |||

