Изобретение относится к области медицины для профилактики, лечения и реабилитации заболеваний позвоночника, опорно-двигательного аппарата и сопутствующих патологий и предназначено для вытяжения позвоночника, восстановления межпозвоночных дисков и коррекции взаимного положения позвонков без хирургического вмешательства.
В связи с прогрессированием заболеваний опорно-двигательного аппарата пациентов, роста травм позвоночника приобретает все большую актуальность реабилитационное оборудование.
Хорошо известен способ лечения заболеваний позвоночника, такой как - тракционное вытяжение. Оно отлично зарекомендовало себя в современной медицине, как самый эффективный безоперационный метод лечения патологий позвоночника.
Тракционное оборудование способствует:
- растяжению околопозвонковых связок и мышц;
- расслаблению спазмированных мышц;
- уменьшению сдавливания корешков сосудов и нервов межпозвонковыми дисками;
- увеличению межпозвонкового расстояния;
натяжению продольной задней связки позвоночника, а также выталкиванию вперед сместившихся межпозвоночных дисков;
- препятствию застоя крови и улучшению местного кровообращения.
Для сокращения длительности сеанса и повышения результативности терапии предоставляются дополнительные возможности, которые необходимо учитывать:
- подогрев растягиваемой области;
- вспомогательное вибрационное воздействие;
- высокая управляемость.
Представлен большой ассортимент простых разновидностей тракционных аппаратов - это кушетки массажно-тракционные; устройства для управления натяжением ремней, которые можно фиксировать к массажной кушетке или к стене.
Известно устройство для вытяжения позвоночника (патент RU 2195243, МПК А61Н 1/02, опубл. 27.12.2002). Устройство содержит корпус, блоки вытяжения, исполнительные механизмы, включающие электродвигатель постоянного тока, элементы крепления пациента, кинематически связанные с исполнительными механизмами при помощи гибкой связи, программно-временной блок, блок питания, датчики контроля заданных режимов вытяжения, аварийный переключатель, вибратор. Корпус устройства выполнен полым, внутри корпуса размещена с возможностью продольного возвратно-поступательного перемещения массажная тележка, снабженная установленными на платформе роликами-массажерами, кинематически связанными с электромеханическим винтовым подъемным механизмом, при этом рабочая поверхность корпуса выполнена с прорезью для роликов-массажеров, а вибратор установлен на платформе роликов-массажеров и снабжен регулятором амплитуды и частоты вибрации. Для автоматического плавного регулирования и дозирования силы тяги в процессе вытяжения шейного и поясничного отделов позвоночника блоки вытяжения выполнены в виде винтового тягового механизма с червячным электроприводом и датчиками контроля силы тяги.
Известно устройство для вытяжения позвоночника (патент RU 2265427, МПК А61Н 1/02, опубл. 10.12.2005), которое содержит полый корпус, рабочая поверхность которого выполнена в виде кушетки с прорезью в области расположения позвоночника, размещенные внутри корпуса блоки вытяжения шейного и поясничного отделов позвоночника, последний из которых выполнен в виде винтового тягового механизма с червячным приводом. Каждый из блоков вытяжения снабжен соответствующим тяговым рычагом и датчиком контроля заданной силы вытяжения. Кушетка состоит из неподвижной грудной и неподвижной тазобедренной секций, последняя из которых установлена с возможностью продольного возвратно-поступательного перемещения на роликах и кинематически связана с тяговым рычагом блока вытяжения поясничного отдела позвоночника, а винтовой тяговый механизм - с червячным приводом блока вытяжения поясничного отдела позвоночника. Внутри корпуса размещены массажная тележка, установленная с возможностью продольного возвратно-поступательного перемещения на направляющих рельсах и блоки вытяжения поясничного и шейного отделов позвоночника, причем блок выполнен в виде винтового тягового механизма с червячным электроприводом и через кинематическую связь соединен с блоком.
Недостатком данных решений является то, что дозирование силы тяги и воздействие осуществляется только в одном направлении и воздействует только на позвоночник, что не обеспечивает максимальный терапевтический эффект.
Близким к заявляемому решению является х-тракционный способ вытяжения и удлинения позвоночника и интерактивная тракционно-релаксационная установка для его осуществления (патент RU 2459599, МПК А61Н 1/02; A61F 5/00, опубл. 10.12.2005). Установка включает раму с механизмом для вытяжения позвоночника, панель для головы и панель для голеней ног, опорные поверхности для тела пациента. Механизм для вытяжения позвоночника представляет собой многосекционный шарнирно-рычажный механизм в виде нюрнбергских ножниц, состоящий из шарнирно соединенных звеньев, выполненный с возможностью раздвижения/сдвижения вдоль рамы с помощью привода. Опорные поверхности для тела пациента соединены с механизмом для вытяжения позвоночника посредством вертикальных опор, установленных на осях шарниров механизма для вытяжения позвоночника и выполненных с возможностью движения опорных поверхностей для тела пациента в вертикальной плоскости. Панели для головы или для голеней ног закреплены на раме неподвижно или на площадке, соединенной с осью одного из шарниров с возможностью движения по поверхности рамы. Верхние шарниры шарнирно-рычажного механизма выполнены с возможностью перемещения на роликах. Нижние шарниры связаны с вертикальными опорами и обеспечивают их перемещение. Панель для головы или панель для голеней ног закреплена на раме неподвижно или на площадке, соединенной с осью одного из шарниров механизма для вытяжения позвоночника с возможностью движения в горизонтальной плоскости по поверхности рамы с помощью роликов, установленных на осях на площадке, раздвижение и сдвижение механизма для вытяжения позвоночника осуществляется с помощью электро-, гидро-, пневмоприводов, закрепленных на раме и, -или ручных приводов.
Недостатком прототипа является то, что тракционное усилие направлено только вдоль одной оси позвоночника с небольшими вариациями, что практически полностью исключает тракционную ассиметрию, которая значительно увеличивает терапевтический эффект.
Все вышеуказанные решения недостаточно эффективны в реализации максимального терапевтического эффекта в силу того, что тракционное усилие направлено только вдоль одной оси позвоночника с небольшими вариациями, что практически полностью исключает тракционную асимметрию, которая значительно увеличивает терапевтический эффект.
Целью настоящего изобретения является устранение вышеуказанных недостатков прототипа, а именно создание тракционного устройства для вытяжения позвоночника, позволяющего производить ассиметричное тракционное вытяжение позвоночника и суставов пациента в широком диапазоне.
Поставленная цель достигается тем, что конструкция тракционного устройства для вытяжения позвоночника позволяет точно и плавно позиционировать приложение тракционного усилия и плавно регулировать значение тракционного усилия независимо для каждой конечности пациента, что предоставляет возможность формировать широкий диапазон асимметричных вытяжений.
Поставленная цель достигается тем, что конструкция тракционного устройства осуществляет тракционное воздействие на позвоночник и суставы пациента путем приложения тракционных усилий к каждой конечности. При этом, тракционное усилие прилагается к каждой конечности независимо, имеет широкой диапазон направлений тракционных усилий и широкий диапазон значений тракционных усилий. Направление и значения этих тракционных усилий регулируются точно и плавно. Вышеизложенное предоставляет возможность формировать широкий диапазон асимметричных вытяжений.
Соответственно, технический результат заявляемого технического решения «ТРАКЦИОННОЕ УСТРОЙСТВО ДЛЯ ВЫТЯЖЕНИЯ ПОЗВОНОЧНИКА» состоит в следующем.
Предлагаемое изобретение позволяет увеличить терапевтический эффект с помощью асимметричного вытяжения позвоночника и суставов, за счет того, что тракционное устройство для вытяжения позвоночника, включает основную раму 1, выполненную полой, которая соединена с неподвижной секцией 7, фиксированной опорой для головы 6 и секциями конечностей, блок управления рабочим давлением 18 пневмоцилиндров 15, 23, при этом каждая секция верхних 3 и нижних 8 конечностей снабжена тракционным приводом 4,9 с фиксаторами конечностей 5,10, секции верхних 3 и нижних 8 конечностей выполнены с возможностью регулирования положения относительно оси позвоночника пациента в вертикальной плоскости с помощью линейных электромеханических приводов 13, 22, регулирование положения секций верхних 3 и нижних 8 конечностей относительно оси позвоночника пациента в горизонтальной плоскости выполняется с помощью линейных электромеханических приводов 17, 19, которые расположены внутри основной рамы 1.
Тракционное усилие, прикладываемое к тракционным приводам 4, 9 секций верхних 3 и нижних 8 конечностей составляет 1 -40 кгс.
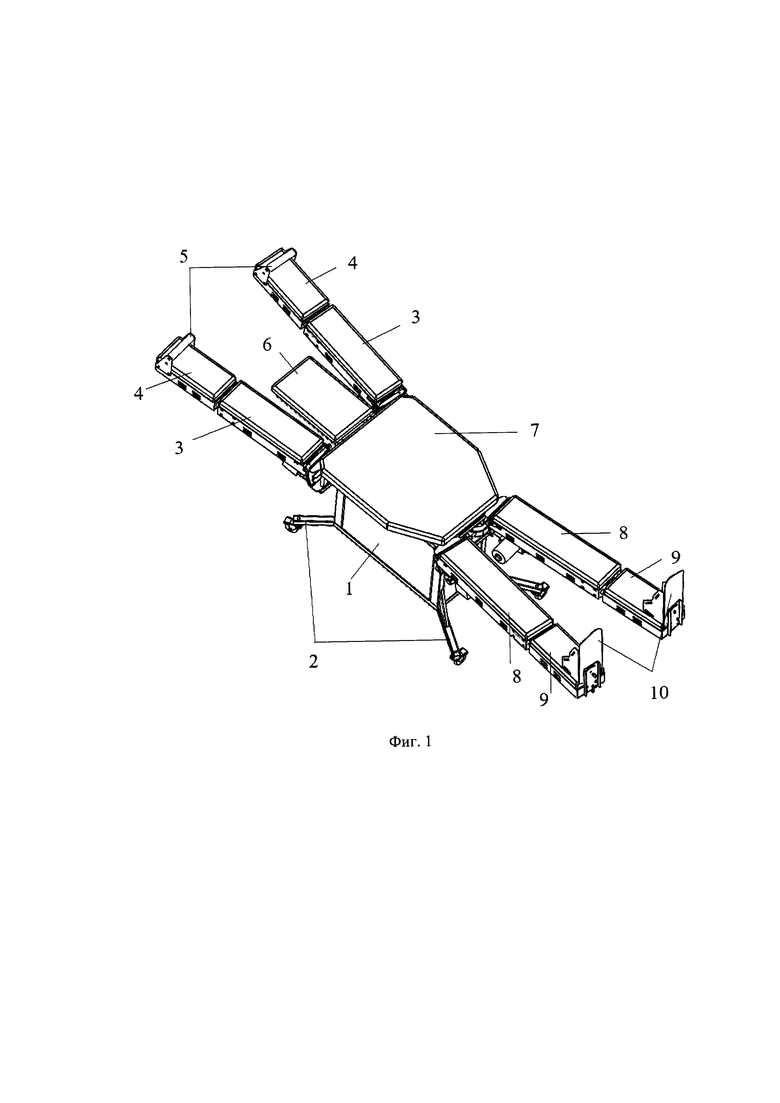
Заявляемое техническое решение поясняется изображениями, а именно видом сверху тракционного устройства (фиг.1), где:
1 - основная рама тракционного устройства;
2 - опоры с фиксируемыми колесами;
3 - секция верхних конечностей;
4 - тракционный привод верхних конечностей;
5 - фиксатор верхних конечностей;
6 - фиксированная опора для головы;
7 - неподвижная секция;
8 - секция нижних конечностей;
9 - тракционный привод нижних конечностей;
10 - фиксатор нижних конечностей.
Тракционное устройство включает основную раму 1, которая расположена на четырех опорах с фиксируемыми колесами 2.
Размещение тракционного устройства на фиксированных колесах 2 обеспечивает мобильность устройства, возможно использование других элементов фиксации устройства на горизонтальной поверхности, например, фиксированные резьбовые соединения, не предусматривающие перемещение изделия.
К основной раме 1 присоединены секции верхних конечностей 3, секции нижних конечностей 8 и фиксированная опора для головы 6. Над основной рамой размещена неподвижная секция 7.
Секции верхних конечностей 3 включают тракционные приводы верхних конечностей 4, а секции нижних конечностей 8 включают тракционные приводы нижних конечностей 9, которых имеют фиксаторы верхних конечностей 5 и фиксаторы нижних конечностей 10.
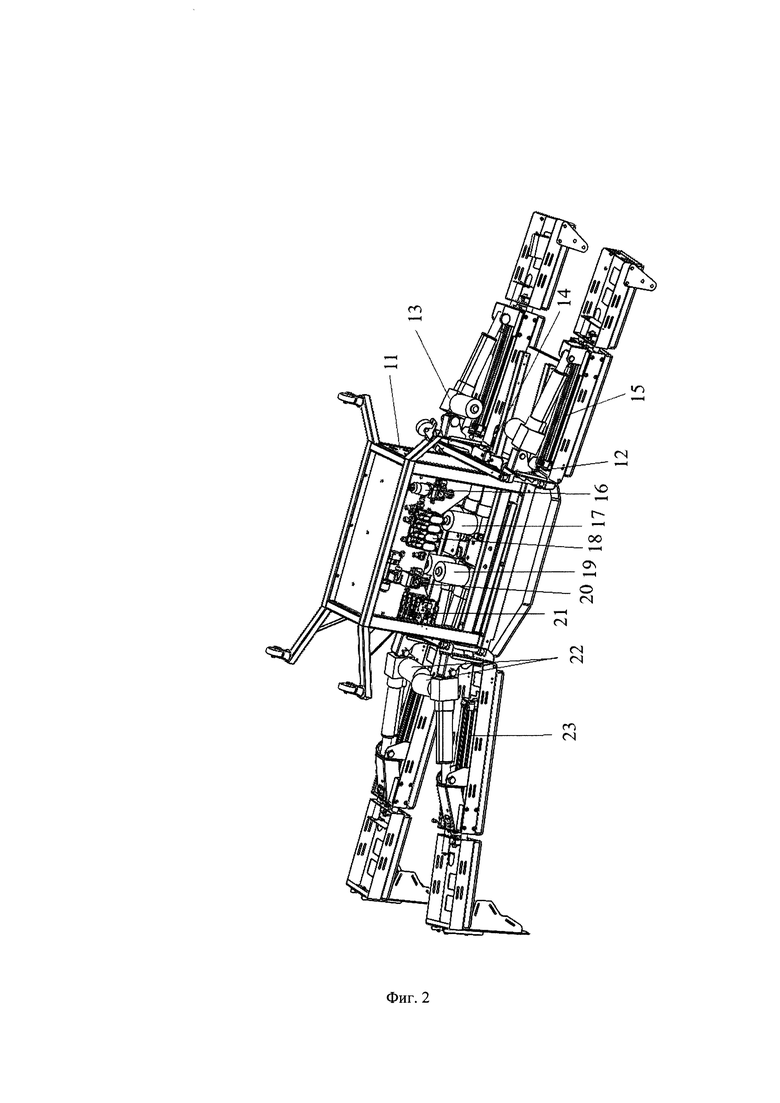
На фиг. 2 показан вид снизу тракционного устройства, где:
11 - панель подключения;
12 - датчик угла положения секций верхних и нижних конечностей в горизонтальной плоскости (четыре датчика по одному для каждой секции);
13 - линейный электромеханический привод позиционирования секции верхних конечностей в вертикальной плоскости;
14 - датчик угла положения секций верхних и нижних конечностей в вертикальной плоскости (четыре датчика по одному для каждой секции);
15 - пневмоцилиндр секции верхних конечностей;
16 - воздушный фильтр;
17 - линейный электромеханический привод позиционирования верхних конечностей в горизонтальной плоскости;
18 - блок управления рабочим давлением пневмоцилиндров;
19 - линейный электромеханический привод секции нижних конечностей в горизонтальной плоскости;
20 - клапан подачи рабочего давления;
21 - электронный блок управления тракционного устройства;
22 - линейный электромеханический привод секции нижних конечностей в вертикальной плоскости;
23 - пневмоцилиндр секции нижних конечностей.
На основной раме 1 тракционного устройства расположена панель подключения 11 и датчики угла положения секций верхних и нижних конечностей в горизонтальной плоскости 12. Панель подключения 11 включает разъем подключения кабеля питания от сети 230 В, кнопку включения тракционного устройства, порт подачи воздуха высокого давления и порт подключения кнопки безопасного аварийного останова (на фиг. 1, 2 не показаны).
На секциях верхних конечностей 3 и секциях нижних конечностей 8 расположены соответственно, датчики угла положения секций верхних и нижних конечностей в вертикальной плоскости 14.
Внутри основной рамы 1, которая выполнена полой, размещен воздушный фильтр 16, линейные электромеханические приводы позиционирования секций верхних конечностей в горизонтальной плоскости 17, линейные электромеханические приводы позиционирования секций нижних конечностей в горизонтальной плоскости 19, блок управления рабочим давлением 18 пневмоцилиндров 15, 23, клапан подачи рабочего давления 20, электронный блок управления 21.
Как показано на фиг. 1, 2 секции верхних конечностей 3 включают линейные электромеханические приводы позиционирования секций верхних конечностей в вертикальной плоскости 13 и пневмоцилиндры 15, а секции нижних конечностей 8 включают линейные электромеханические приводы позиционирования секций нижних конечностей в вертикальной плоскости 22 и пневмоцилиндры 23.
Пневмоцилиндры 15, 23 обеспечивают тракционное усилие вдоль продольной оси секций верхних и нижних конечностей.
Для получения клинического результата изобретение может быть осуществлено следующим предпочтительным образом, не исключающим иные способы осуществления в рамках заявленной формулы изобретения.
Управление тракционным устройством осуществляется оператором через планшетный персональный компьютер (планшетный ПК), работающий под ОС Android с установленным программным обеспечением (ПО) управления тракционным устройством (ПО оператора). Планшетный ПК имеет Bluetooth модуль для обмена данными между ПО оператора и электронным блоком управления 21 тракционного устройства.
Перед началом работы к тракционному устройству подключают источник сжатого воздуха (на фиг. 1, 2 не показан), через специальный порт (на фиг. 1, 2 не показан), расположенный на панели подключения 11, затем запускают на планшетном ПК (на фиг. 1, 2 не показан) ПО оператора и соединяются с электронным блоком управления 21 тракционного устройства по Bluetooth интерфейсу. После соединения планшетного ПК с электронным блоком управления 21, в соответствие с указанием ПО оператора нажимают на тракционном устройстве кнопку аварийного безопасного останова изделия (на фиг. 1, 2 не показано). Без подключения и последующей проверки работоспособности кнопки аварийного безопасного останова изделия, тракционный стол не запустит основной алгоритм работы.
При помощи ПО оператора приводят секции верхних конечностей 3 и секции нижних конечностей 8 в горизонтальное положение для удобства размещения пациента на тракционном устройстве.
Перед началом работы тракционного устройства, пациента размещают спиной на неподвижной секции 7, голову пациента размещают на фиксированной опоре для головы 6, конечности пациента размещают, соответственно на секциях верхних конечностей 3 с фиксатором верхних конечностей 5 и секциях нижних конечностей 8 с фиксатором нижних конечностей 10. Кнопку безопасного аварийного останова передают пациенту в руку (на фиг. 1, 2 не показано).
Оператор на планшетном ПК при помощи ПО управляет секциями верхних конечностей 3 и секциями нижних конечностей 8, которые занимают выбранную в соответствии с рекомендациями врача оператором позицию, образуя направление вектора тракционного усилия для каждой конечности при помощи линейных электромеханических приводов секций нижних конечностей в вертикальной плоскости 22 и линейных электромеханических приводов секций нижних конечностей в горизонтальной плоскости 19, линейных электромеханических приводов секций верхних конечностей в вертикальной плоскости 13, и линейных электромеханических приводов секций верхних конечностей в горизонтальной плоскости 17 в пространстве в соответствие с заданными параметрами оператора. Каждая конечность пациента перемещается в пространстве независимо друг от друга, что предоставляет возможность формировать широкий диапазон несимметричных вытяжений в пределах:
- регулирование горизонтального угла секции нижних конечностей 8 относительно оси позвоночника от 0° до 35°;
- регулирование вертикального угла секции нижних конечностей 8 относительно оси позвоночника от -15° до 45°;
- регулирование горизонтального угла секции верхних конечностей 3 относительно оси позвоночника от 0° до 30°;
- регулирование вертикального угла секции верхних конечностей 3 относительно оси позвоночника: от -15° до 45°.
После окончания позиционирования каждой конечности, при помощи ПО, оператор на планшетном ПК задает тракционное усилие, прикладываемое к каждой конечности пациента, при этом направление тракционного усилия и его значение задаются независимо для каждой конечности, возможность изменения направления и значения тракционного усилия с течением времени позволяет осуществлять как статическое, так и динамическое тракционное воздействие, ассиметрия же реализуется путем независимого позиционирования конечностей.
Направление тракционного усилия и изменение значения тракционного усилия с течением сеанса тракций могут изначально задаваться программой ПК и не требовать вмешательства оператора на весь период сеанса тракционной терапии.
Тракционное усилие, выраженное в кгс, в диапазоне:
- усилие, прилагаемое к тракционным приводам секций нижних конечностей: 1-40 кгс;
- усилие, прилагаемое к тракционным приводам секций верхних конечностей: 1-40 кгс.
Тракционное усилие передается к каждой конечности путем формирования электронным блоком управления 21 управляющих сигналов на блок управления рабочим давлением 18 пневмоцилиндров 15 и 23. Питание электронного блока управления 21, его исполнительных механизмов и датчиков осуществляется от источника питания, который питается от сети переменного тока 230 В/50 Гц. Источник питания выдает (питает элементы устройства) для питания датчиков и исполнительных механизмов устройства 12 В и 24 В, сам источник питания питается от сети 230 В/50 Гц. Блок управления рабочим давлением 18 для каждого пневмоцилиндра 15, 23 формирует свое значение подводимого к этому пневмоцилиндру рабочего давления, которое соответствует усилию, заданному в ПО оператора. Шток (на фиг. 1, 2 не показан) рабочего пневмоцилиндра 15, 23, передает указанное усилие на тракционной привод 4, 9, секций верхних конечностей 3 и секций нижних конечностей 8, которые, в свою очередь, связаны с верхней и нижней конечностью пациента фиксаторами 5, 10. Для корректной и надежной работы пневмосистемы тракционного устройства в цепь подачи сжатого воздуха встроен воздушный фильтр 16. Положение секций верхних конечностей 3 и секций нижних конечностей 8 отслеживается датчиками угла положения секций верхних и нижних конечностей в вертикальной плоскости 14 и датчиками угла положения секций верхних и нижних конечностей в горизонтальной плоскости 12. Продолжительность тракционного воздействия задается в ПО оператора.
После окончания заданного периода оператором ПО тракционного воздействия, изделие перестает оказывать тракционное усилие на тракционный привод 4 верхних конечностей и тракционный привод 9 нижних конечностей путем:
- плавного сброса давления из пневмоцилиндра 15 верхних конечностей и пневмоцилиндра 23 нижних конечностей из камеры пневмоцилиндра (на фиг. 1, 2 не показаны), обеспечивающей его рабочий режим тракционного воздействия на тракционный привод 4, 9;
- подачи рабочего давления в соответствующую камеру пневмоцилиндра 15, 23, посредством клапана подачи рабочего давления 20 тракционных приводов 4, 9, что приводит их в исходное положение и создает плавное безопасное приведение тракционных приводов 4, 9 в исходное состояние (сброс тракционного усилия).
Секции верхних конечностей 3 и секции нижних конечностей 8 необходимо привести в положение, удобное для покидания тракционного устройства пациентом (таким же образом, как и приведение их стартовое положение с помощью ПО оператора) и освободить фиксаторы верхних конечностей 5 и фиксаторы нижних конечностей 10.
Таким образом, новизна и изобретательский уровень заявленного изобретения состоят в том, что конструкция тракционного устройства позволяет точно и плавно управлять направлением и значением тракционного усилия для каждой конечности пациента независимо, что предоставляет возможность формировать широкий диапазон асимметричных вытяжений.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ тракционной кинезитерапии | 2025 |
|
RU2839215C1 |
| Х-ТРАКЦИОННЫЙ СПОСОБ ВЫТЯЖЕНИЯ И УДЛИНЕНИЯ ПОЗВОНОЧНИКА И ИНТЕРАКТИВНАЯ ТРАКЦИОННО-РЕЛАКСАЦИОННАЯ УСТАНОВКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2459599C1 |
| Устройство для механотерапии позвоночника | 2015 |
|
RU2612842C1 |
| МЕХАНОТЕРАПЕВТИЧЕСКАЯ УСТАНОВКА ДЛЯ МАССАЖА И ГРАВИТАЦИОННОГО ВЫТЯЖЕНИЯ ПОЗВОНОЧНИКА | 2012 |
|
RU2512959C1 |
| СТОЛ ДЛЯ МАНУАЛЬНОЙ ТЕРАПИИ | 2000 |
|
RU2176494C2 |
| Тренажер для растяжения соединений костей ног и позвоночника человека | 2020 |
|
RU2773794C1 |
| УСТРОЙСТВО ДЛЯ МАССАЖА И ВЫТЯЖЕНИЯ ПОЗВОНОЧНИКА | 2013 |
|
RU2539421C2 |
| СПОСОБ ВЫТЯЖЕНИЯ ПОЗВОНОЧНИКА ДЛЯ ВОССТАНОВЛЕНИЯ МЕЖПОЗВОНОЧНЫХ ДИСКОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2314067C2 |
| СТОЛ ДЛЯ МАССАЖА, МАНУАЛЬНОЙ ТЕРАПИИ И ВЫТЯЖЕНИЯ ПОЗВОНОЧНИКА | 2021 |
|
RU2766776C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ФИЗИОТЕРАПЕВТИЧЕСКОГО ОЗДОРОВЛЕНИЯ ЧЕЛОВЕКА | 2012 |
|
RU2519975C1 |
Изобретение относится к области медицины. Тракционное устройство для вытяжения позвоночника, включающее основную раму, выполненную полой, которая соединена с неподвижной секцией, фиксированной опорой для головы и секциями конечностей, блок управления рабочим давлением пневмоцилиндров. Каждая секция верхних и нижних конечностей снабжена тракционным приводом с фиксаторами конечностей. Секции верхних и нижних конечностей выполнены с возможностью регулирования положения относительно оси позвоночника пациента в вертикальной плоскости с помощью линейных электромеханических приводов. Регулирование положения секций верхних и нижних конечностей относительно оси позвоночника пациента в горизонтальной плоскости выполняется с помощью линейных электромеханических приводов, которые расположены внутри основной рамы. Изобретение позволяет увеличить терапевтический эффект с помощью асимметричного вытяжения позвоночника и суставов в широком диапазоне направлений и точно дозировать и контролировать усилие воздействия на позвоночник и суставы пациента. 1 з.п. ф-лы, 2 ил.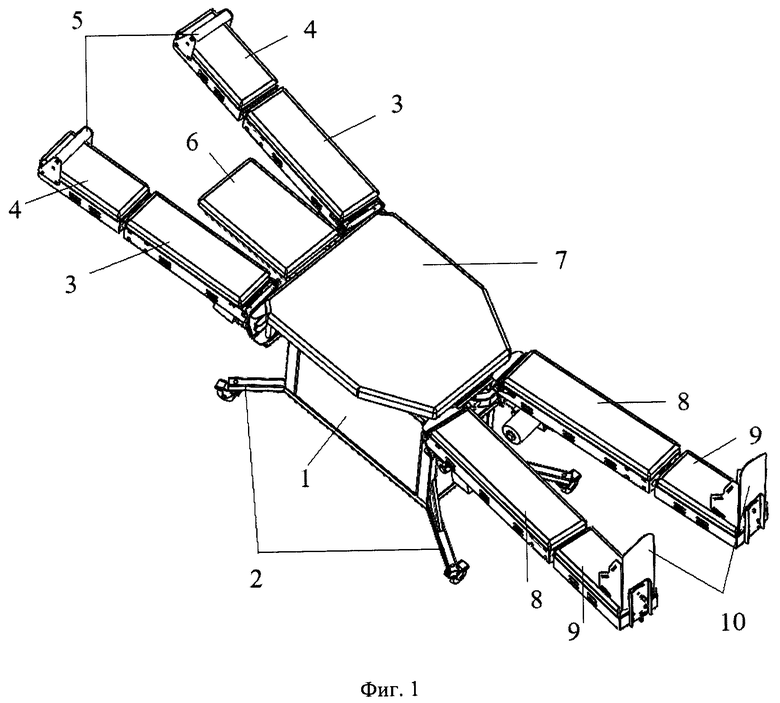
1. Тракционное устройство для вытяжения позвоночника, включающее основную раму (1), выполненную полой, которая соединена с неподвижной секцией (7), фиксированной опорой для головы, (6) и секциями конечностей, блок управления рабочим давлением (18) пневмоцилиндров (15, 23), отличающееся тем, что каждая секция верхних (3) и нижних (8) конечностей снабжена тракционным приводом (4, 9) с фиксаторами конечностей (5, 10), секции верхних (3) и нижних (8) конечностей выполнены с возможностью регулирования положения относительно оси позвоночника пациента в вертикальной плоскости с помощью линейных электромеханических приводов (13, 22), регулирование положения секций верхних (3) и нижних (8) конечностей относительно оси позвоночника пациента в горизонтальной плоскости выполняется с помощью линейных электромеханических приводов (17, 19), которые расположены внутри основной рамы (1).
2. Устройство по п. 1, отличающееся тем, что тракционное усилие, прикладываемое к тракционным приводам (4, 9) секций верхних (3) и нижних (8) конечностей, составляет 1-40 кгс.
| US 20210361513 A1, 25.11.2021 | |||
| Х-ТРАКЦИОННЫЙ СПОСОБ ВЫТЯЖЕНИЯ И УДЛИНЕНИЯ ПОЗВОНОЧНИКА И ИНТЕРАКТИВНАЯ ТРАКЦИОННО-РЕЛАКСАЦИОННАЯ УСТАНОВКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2459599C1 |
| УСТРОЙСТВО ДЛЯ КОРРЕКЦИИ И ЛЕЧЕНИЯ ПОЗВОНОЧНИКА | 1998 |
|
RU2147426C1 |
| УСТРОЙСТВО ДЛЯ КОРРЕКЦИИ И ЛЕЧЕНИЯ ПОЗВОНОЧНИКА | 2004 |
|
RU2250097C1 |
| EP 2974709 B1, 24.08.2022 | |||
| WO 2001085089 A1, 15.11.2001 | |||
| US 20110137343 A1, 09.06.2011 | |||
| CN 111904687 A, 10.11.2020 | |||
| CN 109310510 A, 05.02.2019 | |||
| US 5123916 A1, 23.06.1992. | |||

