Изобретение относится к манипуляторам для механизации подъемно-транспортных операций, в частности к манипуляторам с уравновешивающими механизмами.
Целью изобретения является улучшение динамических свойств манипулятора за счет обеспечения автоматического уравновешиваьшя массы подвижных частей манипулятора и груза.
На чертеже изображена конструкция манипулятора.
Манипулятор содержит колонну I, снабженную приводами ее подъема и поворота вокруг вертикальной оси (не показаны), На колонне 1 закреплен корпус 2, в котором размещено зубчатое колесо 3 с моментным приводом (не показан)„ С зубчатым колесом 3
неуравновешенный .момент. Одновременно перемещающаяся как единое целое со стрелой 5 рейка 7 вращает зубчатое колесо 15 против часовой стрелки,
5 что приводит к перемещению рейки 16 влево и к выдвижению противовеса 17 также влево. Путем подбора массы противовеса 17, а также параметров зубчатых колес 3 и 15 и реек 4, 7 и 16
О можно добиться статического уравновешивания стрелы 5 при любом ее положении в пределах хода.
При приеме груза захватным устройством 14 рейка 13 под действием веса
15 груза перемещается вниз, а блок 12 зубчатых колес вращается по часовой стрелке. При этом рейка 10 и штанга 9 перемещаются вправо, пружина 6 сжимается, а рейка 7 также перемещается
кинематически связана рейка 4, выпол- 0 вправо, вращая зубчатое колесо 15 ненная на стреле 5, Стрела 5 имеет против часовой стрелки, что приводит
возможность возвратно-поступательного перемещения относительно корпуса 2 при вращении зубчатого колеса 3,
На стреле 5 выполнен упор, к которому усилием пружины 6 прижата дополнительная рейка 7, Пружина 6 другим своим концом взаимодействует с кронштейном 8. Штанга 9, скрепленная одним концом с рейкой 7, а противоположным - с горизонтальной 10, расположена внутри пружины 6 и в отверстии кронштейна В. В корпусе П передаточного механизма установлен блок 12 из жестко связанных друг с другом зубчатых колес, одно из которых взаимодействует с горизонтальной рейкой 10, а второе - с вертикальной рейкой 13, к которой крепится захватное устройство 14, С рейкой 7 взаимо- действует зубчатое колесо 15, установленное в корпусе 2, С противоположной стороны рейки 7 с зубчатым колесом 15 взаимодействует рейка 16, скрепленная с противовесом 17, Корпус 11 закреплен на стреле 5,
Манипулятор работает следуюш,им образом.
В исходном положении пружина 6 при- д механизмом его-перемещения, кинемажимает рейку 7 к упору стрелы Ь, при этом усилие прижима должно превышать суммарные силы трения, возникающие при работе механизмов. При повороте зубчатого колеса 3 по часовой стрелке стрела 5 выдвигается вправо, одновременно движутся вправо и корпус 11 передаточного механизма с захватным устройством 14, При.этом возникает
55
тически связанным с захватным устрой ством, отличающийся тем, что, с целью улучшения динамических свойств, он снабжен установленной на стреле с возможностью взаимодействия с зубчатым колесом зубчато- реечного механизма дополнительной подпружиненной к корпусу стрелы рейкой, связанной с помощью передаточнеуравновешенный .момент. Одновременно перемещающаяся как единое целое со стрелой 5 рейка 7 вращает зубчатое колесо 15 против часовой стрелки,
что приводит к перемещению рейки 16 влево и к выдвижению противовеса 17 также влево. Путем подбора массы противовеса 17, а также параметров зубчатых колес 3 и 15 и реек 4, 7 и 16
можно добиться статического уравновешивания стрелы 5 при любом ее положении в пределах хода.
При приеме груза захватным устройством 14 рейка 13 под действием веса
груза перемещается вниз, а блок 12 зубчатых колес вращается по часовой стрелке. При этом рейка 10 и штанга 9 перемещаются вправо, пружина 6 сжимается, а рейка 7 также перемещается
25
40 45
к смещению противовеса 17 влево. Таким образом, возникает момент, пари- рующий неуравновешенный статический момент при приеме груза захватным устройством 14,
С целью гашения колебаний, которы могут возникнуть при захвате груза, между упором стрелы 5 и рейкой 7 ус30 тановлен демпфер (не показан). Смещение захватного устройства 14 вниз компенсируется дополнительным включением привода подъема колонны 1 и ее перемещением на соответствующее
35 расстояние вверх.
Таким образом, предлагаемое устройство обеспечивает уравновешивание как при выдвижении стрелы, так и при захвате груза.
Формула изобретения
1, Манипулятор, содержащий вертикальную колонну с размещенной на ней стрелой, на одной конце которой размещено захватное устройство с приводом его выдвижения, а на противоположном - противовес с зубчато-реечным
5
тически связанным с захватным устройством, отличающийся тем, что, с целью улучшения динамических свойств, он снабжен установленной на стреле с возможностью взаимодействия с зубчатым колесом зубчато- реечного механизма дополнительной подпружиненной к корпусу стрелы рейкой, связанной с помощью передаточ3 13084634
ного механизма кинематической цепи смагически связанных блоком из двух вертикально размещенным захватнымзубчатых колес, при этом горизонталь- устройством,но расположенная рейка связана с по- 2. Манипулятор по п., о т л и -мощью штанги с дополнительной подпру- чающийся тем,.что передаточ-5 жиненной рейкой, а вертикально распо- ный механизм вьтолнен в виде двухложенная рейка связана с захватным взаимно перпендикулярных реек, кине-устройством.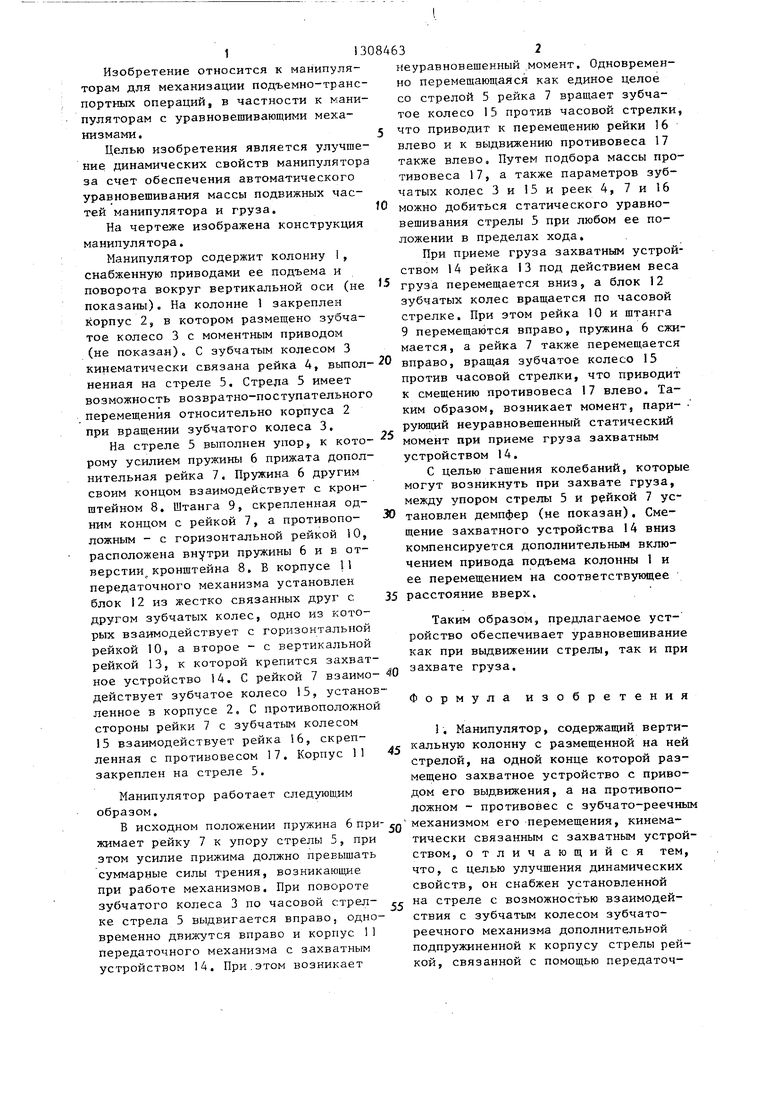
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1986 |
|
SU1393618A1 |
| Манипулятор | 1986 |
|
SU1371895A1 |
| Манипулятор | 1990 |
|
SU1777993A1 |
| Манипулятор | 1988 |
|
SU1684021A1 |
| Грузозахватное устройство | 1989 |
|
SU1751138A1 |
| Рука манипулятора | 1981 |
|
SU992180A1 |
| Телескопический захват | 1987 |
|
SU1442471A1 |
| Манипулятор для дозированной загрузки емкости сыпучим материалом | 1985 |
|
SU1281399A1 |
| Манипулятор | 1984 |
|
SU1217652A1 |
| Исполнительное устройство манипулятора | 1990 |
|
SU1756135A1 |
Изобретение относится к области машиностроения. Цель изобретения - улучшение динамических свойств манипулятора за счет обеспечения автоматического уравновешивания масс подвижных частей манипулятора и перемещаемого груза. Манипулятор содержит колонну 1 со стрелой 5, на одном конце которой смонтировано захватное устройство 14, на противоположном противовес 17. Механизм перемещения противовеса и связь его с захватным устройством вьшолнены зубчато-реечным механизмом. На стреле 5 выполнена рейка 4, связанная с приводным зубча-, тым колесом 3. На противоположной стороне стрелы образован паз, в котором установлена подпружиненная дополнительная рейка 7, взаимодействую- щая через зубчатое колесо 15 с рейкой 11 противовеса 17. Тяга соединяет до- полнительную рейку 7 с захватным устройством 14 через передаточный механизм, выполненный в виде двух взаимно перпендикулярных реек, связанных между собой блоком 12 из двух зубчатых, колес. Вертикальная рейка 13 соединена со схватом. Горизонтальная рейка 10 связана с дополнительной рейкой 7. 1 3.п. ф-лы, 1 ил. I (Л J7 2 Г6 15 7 Y ) ..х: гз
| Кран для установки пролетных строений мостов | 1953 |
|
SU100019A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
