Изобретение относится к изготовлению блоков электро-и радиоаппаратуры, в частности к устройствам для установки изделий электронной техники (в дальнейшем изделий) на печатную плату. Оно может также относиться к машиностроению, в частности к конструкциям промышленных роботов для выполнения сборочных и монтажных работ.
Известен захват манипулятора по а.с.№1404335, 7 B25J 15/00, опубл. в БИ №23, 1988 г., содержащий зажимные губки, установленные с возможностью поступательного перемещения и кинематически связанные между собой посредством зубчато-реечной передачи, выполненной в виде двух зубчатых реек, обращенных одна к другой зубчатыми частями, и зубчатого колеса, установленного на оси в зацеплении с упомянутыми зубчатыми рейками, при этом зажимные губки смонтированы на концах зубчатых реек, расположенных с одной стороны.
Недостатком является то, что ползуны захвата манипулятора при использовании для монтажа изделий на печатную плату выполняются в виде длиномерных стержней, которые из-за своих погрешностей создают при перемещении в направляющих достаточно большое трение. Для преодоления этого трения требуется увеличивать усилие развиваемое поршнем силового цилиндра. Увеличение же этого усилия может привести к повреждению изделия.
Известный схват промышленного робота по патенту РФ №2149098, 7 B25J 15/00//Н05К 13/04, от 16.11.98, опубл. в БИ №14, 2000 г., содержит зажимные губки, длиномерные стержни которых смонтированы на одних и тех же катках, с их диаметрально противоположных сторон.
Недостатком данного схвата является его сложная конструкция. Длиномерные стержни губок выполнены в виде зубчатых реек, обращенных одна к другой зубчатыми частями. Имеется зубчатое колесо, установленное на одной из осей, которых может быть, по меньшей мере, две. Цилиндрические катки, установлены группами по четыре катка на каждой оси и попарно расположены по обе стороны от зубчатых реек. Каждая рейка выполнена с четырьмя направляющими для каждой группы катков. Первая пара направляющих зубчатых реек установлена с возможностью взаимодействия с одной из пар цилиндрических катков, а вторая пара направляющих зубчатых реек установлена с возможностью взаимодействия с другой парой цилиндрических катков, расположенной диаметрально противоположно относительно упомянутой выше первой пары направляющих.
Задачей, решаемой данным изобретением, является упрощение конструкции.
Технический результат, достигаемый при использовании настоящего изобретения заключается в том, что:
- конструкция схвата выполнена более простой путем применения более простых деталей и уменьшения общего количества используемых в нем деталей;
- уменьшена материалоемкость путем уменьшения количества используемых деталей;
- уменьшена себестоимость схвата путем упрощения его конструкции.
Указанный выше технический результат достигается тем, что известный схват промышленного робота, содержащий зажимные губки с длиномерными стержнями, установленными с возможностью возвратно-поступательного перемещения, смонтированые на катках, с их диаметрально противоположных сторон, дополнительно снабжен, по меньшей мере, двумя магнитами, каждый из которых закреплен на одном из двух длиномерных стержней с возможностью их взаимодействия с другим длиномерным стержнем. При этом, например, длиномерные стержни зажимных губок кинематически связаны между собой, по меньшей мере, одним двухплечим рычагом.
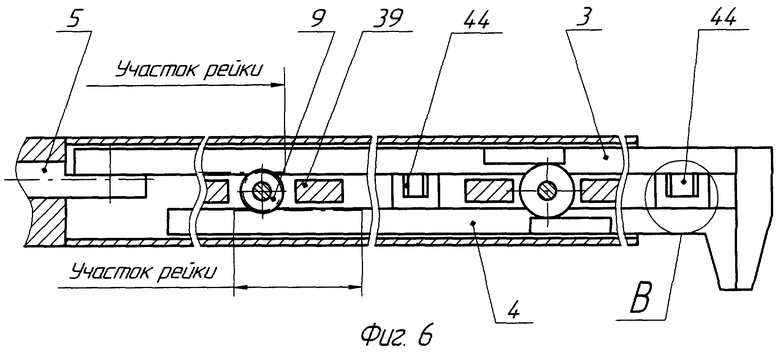
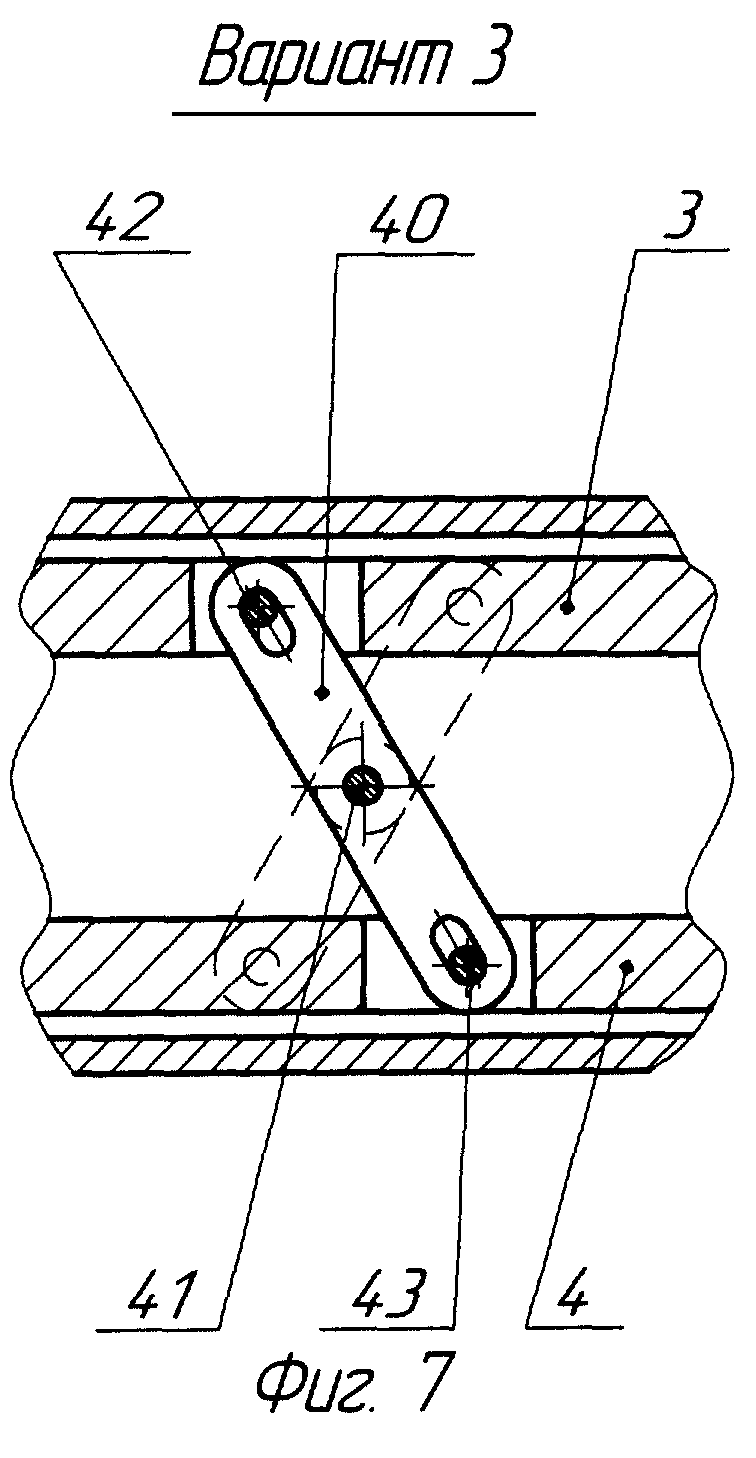
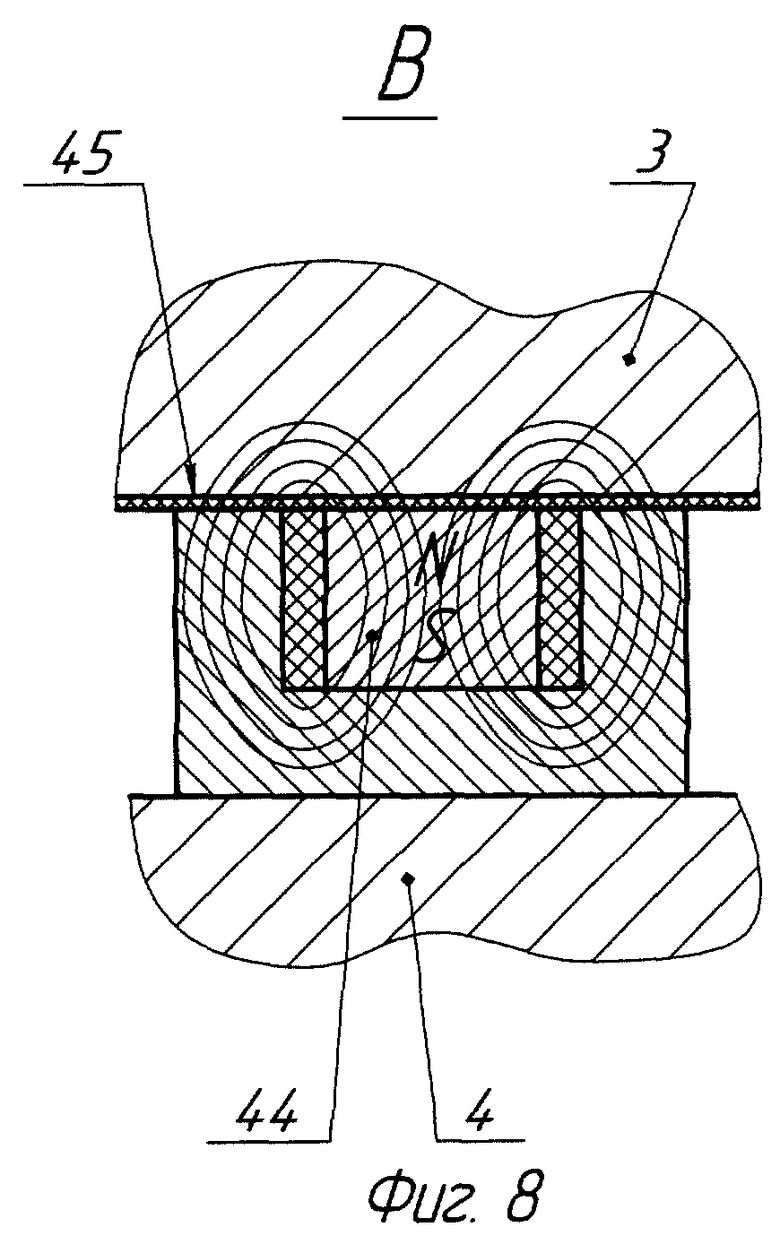
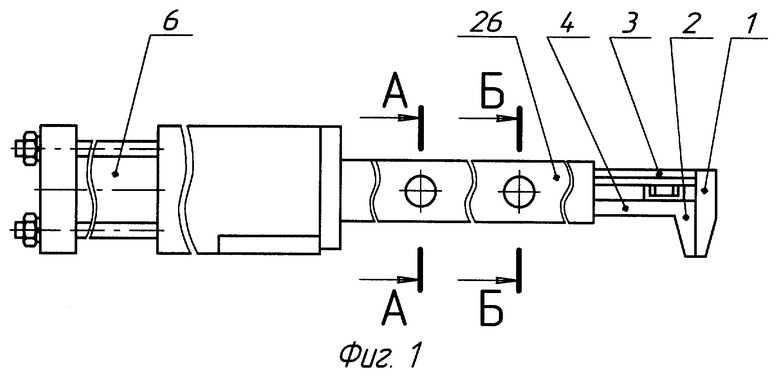
На фиг.1 показан схват промышленного робота, общий вид; на фиг.2 - разрез А-А (вариант 1); на фиг.3 - разрез Б-Б (вариант 1);на фиг.4 - разрез А-А (вариант 2); на фиг.5 - разрез Б-Б (вариант 2); на фиг.6 - схват в разрезе (вариант 1); на фиг.7 - элемент схвата в разрезе (вариант 3); на фиг.8 - элемент В (разрез).
Схват промышленного робота (см. фиг.1) содержит зажимные губки 1 и 2, установленные на концах длиномерных стержней 3 и 4 (в дальнейшем стержни), расположенные с одной стороны. Стержень 3 соединен со штоком 5 привода 6, например пневмоцилиндра или шагового электродвигателя.
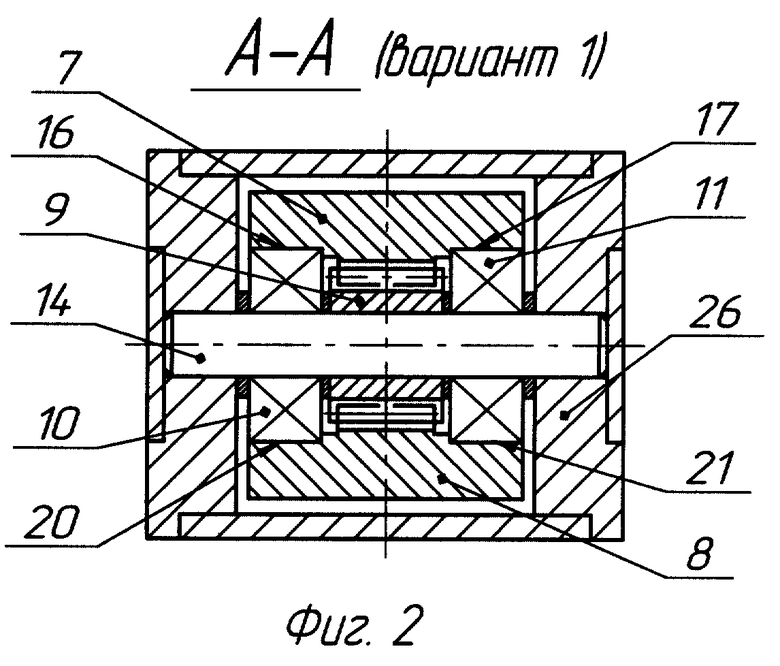
Участки стержней 3 и 4 (см. фиг.2, 4 и 6) могут быть выполнены, например, в виде зубчатых реек.
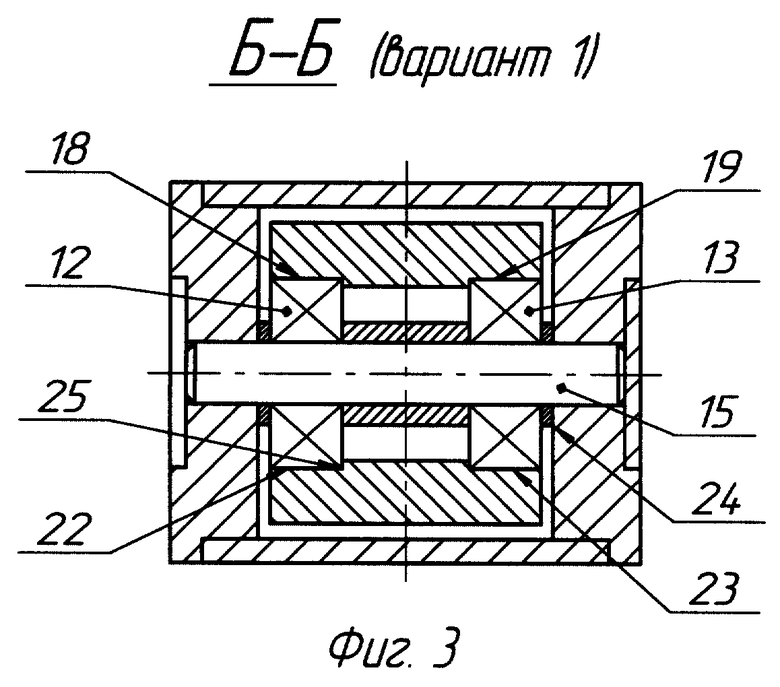
Участки зубчатых реек 7 и 8 (вариант 1) кинематически соединены между собой зубчатым колесом 9. Стержни 3 и 4 смонтированы на цилиндрических катках 10, 11, 12и 13. Зубчатое колесо 9, катки 10 и 11 смонтированы на оси 14. Катки 12 и 13 смонтированы на оси 15. Катки 10 и 12 расположены с одной стороны стержней 3 и 4, а катки 11 и 13 - с другой стороны этих же стержней. На стержне 3 выполнены четыре направляющих 16, 17, 18 и 19. На стержне 4 также выполнены четыре направляющих 20, 21, 22 и 23. Для исключения смещения зубчатого колеса 9, цилиндрических катков 10, 11, 12и 13 применены восемь прокладок 24. Для исключения смещения стержней 3 и 4 вправо и влево (см. фиг.2 и 3) направляющие 16, 17, 18, 19, и 20, 21, 22, 23 снабжены ребордами 25, то есть выступающими частями, служащими направляющими при движении по цилиндрическим каткам. Стержни 3 и 4 расположены на основании 26.
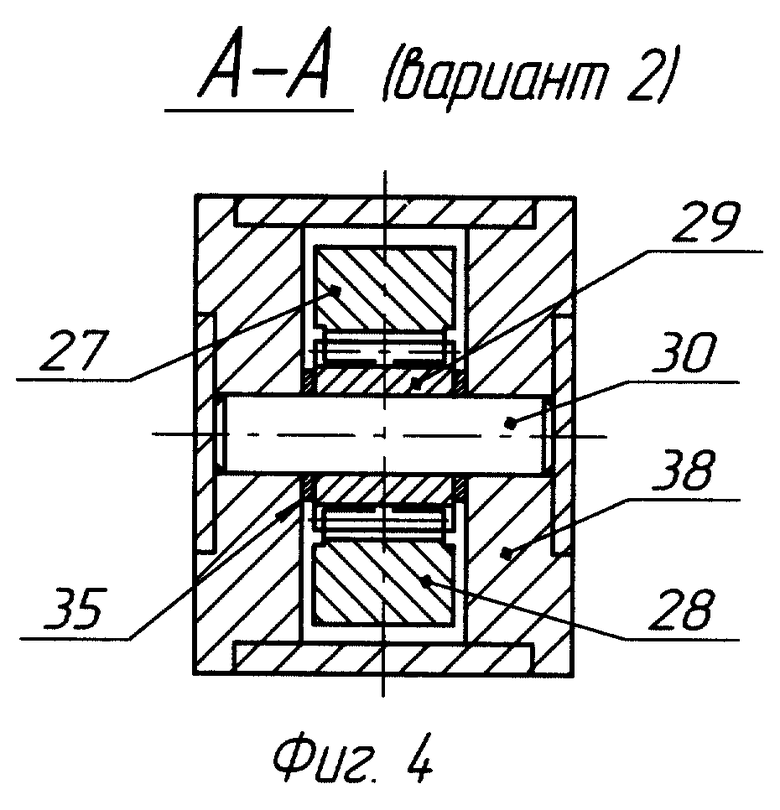
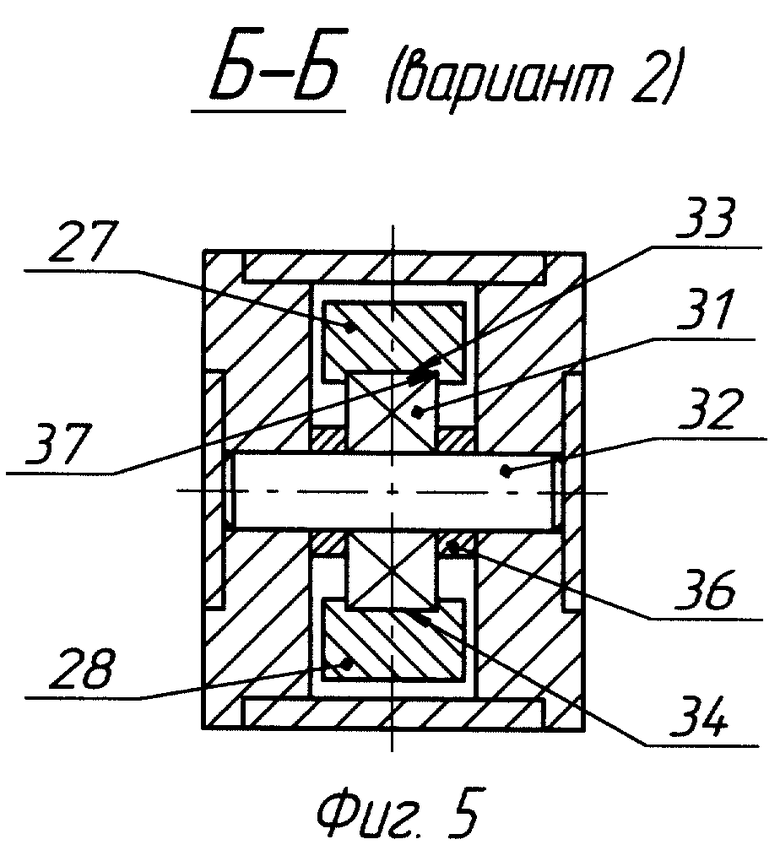
В другом исполнении (вариант 2) участки зубчатых реек 27 и 28 кинематически соединены между собой зубчатым колесом 29,смонтированном на оси 30. Стержни 3 и 4 смонтированы, по меньшей мере, на двух цилиндрических катках 31, каждый из которых установлен на своей оси 32. На стержне 3 выполнены две направляющих 33, а на стержне 4 - две направляющих 34. Для исключения смещения зубчатого колеса 29, цилиндрических катков 31 используются две прокладки 35 и, по меньшей мере, четыре прокладки 36. Для исключения смещения стержней 3 и 4 вправо и влево (см. фиг.5) направляющие 33 и 34 снабжены ребордами 37. Стержни 3 и 4 расположены на основании 38.
Основания 26 и 38 (см. фиг.6) представляет собой корпус прямоугольного сечения, боковые стенки которого соединены несколькими перемычками 39. В полостях каждого основания размещены стержни 3 и 4. На каждом основании закреплен привод 7.
Выполнение стержней 3 и 4 (варианты 1 и 2) в виде зубчатых реек кинематически соединенных зубчатым колесом не является обязательным. Так, например, эти стержни могут быть соединены (см. фиг.7), по меньшей мере, через один двухплечий рычаг 40. В этом случае двухплечий рычаг установлен на оси 41. На двух концах рычага 40 выполнены пазы. Штифты 42 и 43, пропущенные через пазы двухплечего рычага 32, закреплены в стержнях 3 и 4.
В стержне 3 (см. фиг.2 и 3, вариант 1) линии соприкосновения поверхностей направляющих 16, 17, 18и 19с цилиндрическими поверхностями катков 10, 11, 12 и 13 диаметрально противоположны соответственно линиям соприкосновения в стержне 4 поверхностей направляющих 20, 21, 22 и 23 с цилиндрическими поверхностями этих же катков.
В стержне 3 (см. фиг.4 и 5, вариант 2) линии соприкосновения поверхностей направляющих 33 (количество не менее двух) с цилиндрическими поверхностями катков 31 диаметрально противоположны соответственно линиям соприкосновения в стержне 4 поверхностей направляющих 34 с цилиндрическими поверхностями этих же катков.
Для обеспечения строго заданного положения пар стержней 3 и 4 исключающего возможность их смещения в вертикальной плоскости, в каждой паре на одном из стержней закреплено, по меньшей мере, два магнита 44. Каждый магнит 44 закреплен с возможностью взаимодействия с другим стержнем этой пары. Для уменьшения трения в паре магнит - стержень между ними может быть размещена тонкая пластина 45 из антифрикционного материала, например из фторопласта, закрепленная на стержне.
Схват промышленного робота работает следующим образом.
В исходном положении губки 1 и 2 прижаты друг к другу. Для захвата изделия смещают вправо стержень 3. Смещение стержня 3 осуществляется приводом 6, исполнительный элемент которого, например шток 5, соединен с этим стержнем.
В первом и втором вариантах исполнения приводного механизма схвата при смещении стержня 3 зубчатое колесо 9 или 29, находящееся в зацеплении с зубчатыми участками реек стержней 3 и 4, вращается. При этом стержень 4 смещается влево (в противоположную сторону) на то же расстояние, что и стержень 3.
В третьем варианте исполнения приводного механизма схвата при смещении стержня 3 двухплечий рычаг 40 поворачивается вокруг оси 33. При этом стержень 4 смещается в противоположную сторону на то же расстояние, что и стержень 3.
При смещении стержней 3 и 4 (вариант 1) реборды 25 направляющих 16, 17, 18, 19, 20, 21, 22 и 23 обеспечивают точность их направления, а магниты 36 удерживают их в соприкосновении с катками 11, 12, 13 и 14 обеспечивая строго заданное положение губок 1 и 2. Аналогично обеспечивается точность перемещения стержней 3 и 4 в вариантах исполнения 2 и 3.
Губки 1 и 2 отходят друг от друга, каждая на равное расстояние. Схват подводится к изделию электронной техники и при помощи зажимных губок 1 и 2 захватывает его за корпус. Захват осуществляется смещением стержня 3 в обратном направлении, то есть влево. Губки смещаются в направлении друг к другу до тех пор, пока они не соприкасаются с корпусом изделия. При соприкосновении губок 1 и 2 с корпусом этого изделия его захват осуществлен. После выполнения требуемых работ осуществляется выключение схвата. Для этого стержень 3 смещается вправо, а затем, после отхода схвата от изделия, его же смещают влево (обратно) до соприкосновения губок 1 и 2. Цикл работы закончен.
Положительный эффект от настоящего изобретения заключается в следующем:
- конструкция схвата выполнена более простой путем применения более простых деталей и уменьшения общего количества используемых в нем деталей;
- уменьшена материалоемкость путем уменьшения количества используемых деталей;
- уменьшена себестоимость схвата путем упрощения его конструкции.
| название | год | авторы | номер документа |
|---|---|---|---|
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1998 |
|
RU2149098C1 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1995 |
|
RU2108232C1 |
| ПРИВОД ПРОМЫШЛЕННОГО РОБОТА | 2001 |
|
RU2218269C2 |
| МИКРОСХВАТ С СИЛОВЫМ ОЧУВСТВЛЕНИЕМ | 2004 |
|
RU2261170C1 |
| Схват промышленного робота | 1981 |
|
SU1009758A1 |
| ЭЛЕКТРОСТАТИЧЕСКИЙ МИКРОСХВАТ | 2004 |
|
RU2266190C1 |
| Схват промышленного робота | 1980 |
|
SU931467A1 |
| СХВАТ МИКРОМАНИПУЛЯТОРА | 2004 |
|
RU2259915C1 |
| Стыковочное устройство робота | 1989 |
|
SU1627403A1 |
| Схват | 1986 |
|
SU1390021A1 |
Изобретение относится к машиностроению, в частности к конструкциям промышленных роботов для выполнения сборочных и монтажных работ. Схват содержит зажимные губки с длинномерными стержнями, установленными с возможностью возвратно-поступательного перемещения и смонтированными на катках с их диаметрально противоположных сторон. Схват снабжен, по меньшей мере, двумя магнитами, каждый из которых закреплен на одном из двух длинномерных стержней с возможностью их взаимодействия с другим длинномерным стержнем. Длинномерные стержни зажимных губок кинематически соединены между собой, по меньшей мере, одним двухплечим рычагом. Изобретение позволит упростить конструкцию, уменьшить материалоемкость. 1 з.п. ф-лы, 8 ил.
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1998 |
|
RU2149098C1 |
| Устройство для установки магниточувствительных шпилек на шаблоне установки для раскладки проводов в шгут | 1990 |
|
SU1780203A1 |
| Захват манипулятора | 1986 |
|
SU1404335A1 |
| US 4632631, 30.12.1986. | |||

