Изобретение относится к области обеспечения безопасности движения транспортных средств (далее ТС). Может быть использовано для предотвращения дорожно-транспортных происшествий из-за несоблюдения безопасной дистанции между ТС, движущимися друг за другом по одной полосе.
Согласно результатам совместного исследования ВЦИОМ и экспертного центра «Движение без опасности» (https://bezdtp.ru/), более половины автомобилистов попадали в ДТП из-за неправильного выбора дистанции (https://www.asn-news.ru/press_release/23059).
Во время движения по дорогам общего пользования водители ТС стараются соблюдать дистанцию, полагаясь на свой глазомер и опыт управления автомобилем. Во многом это интуитивно, т.е. зависит от навыков, опыта, знаний и общепринятых правил, рекомендованных в автошколе. Даже самый опытный водитель ввиду его психофизического состояния, обусловленного как изменениями внешних факторов (погода, время года и время суток), так и физическим здоровьем, настроением и усталостью, не может точно соблюдать дистанцию, зависящую от скоростного режима движения. Множество задач, которые приходится решать водителю во время движения, почти всегда приводит к потере его внимания к фактору дистанции. Ведь постоянное изменение процесса движения от монотонного до напряженного из-за маневрирования и изменения скорости в транспортном потоке, уменьшает возможность контролировать соблюдение безопасной дистанции. Снижение внимательности и, соответственно, скорости реакции на внешние раздражители, как то свечение стоп-сигналов впереди движущегося транспортного средства, может возникать по причине отсутствия визуальных раздражителей. В результате имеет место «сенсорный голод» - частный случай «дорожного гипноза», называемого также «гипнозом дороги» или «вождением в режиме без внимания» или пониженного внимания из-за отсутствия ярких внешних раздражителей (https://ru.wikipedia.org/Дорожный_гипноз). Сенсорный голод приводит к потере остроты восприятия водителем окружающей обстановки. Внимание рассеивается или переключается на факторы, не имеющие отношения к дорожному движению. Время реакции водителя на внешние раздражители увеличивается, и даже самые незначительные осложнения условий движения могут стать причиной аварии. (Шаров А.Ю., Чижов А.А. Дорожные условия и безопасность движения: учеб. пособие. Екатеринбург: Урал. гос. лесотехн. ун-т.240 с.).
В автомобилях более нового поколения реализованы различные способы предотвращения столкновений и предупреждения о возможном попутном столкновении ТС. Способы реализованы в системе ADAS (advanced driver-assistance systems). Это электронная система, помогающая водителю управлять автомобилем и парковкой. Благодаря безопасному человеко-машинному интерфейсу ADAS повышает безопасность автомобилей и дорожного движения. В системах ADAS используются автоматизированные технологии, датчики и камеры для обнаружения ближайших препятствий или ошибок водителя и соответствующего реагирования (https://ru.wikipedia.org/wiki/ADAS).
Известен способ контроля установленной дистанции и сокращения вероятности попутных столкновений ТС, обеспечивающий автоматическое движение на заданном расстоянии за впереди движущимся ТС, реализованный в электронном аппаратно-программном комплексе - адаптивном круиз-контроле (АСС - adaptive cruise control). Принцип работы адаптивного круиз-контроля заключается в обеспечении автоматического движения ТС с АСС в режимах постоянной скорости, ускорения и замедления. При отсутствии на дороге других автомобилей система поддерживает заданную водителем скорость. При замедлении или перестроении впереди идущего автомобиля происходит замедление автомобиля с АСС до заданной водителем дистанции. На низкой скорости замедление достигается за счет работы тормозной системы, на высокой скорости - за счет снижения мощности двигателя и, при необходимости, работы тормозной систем (http://systemsauto.ru/active/acc.html). Адаптивный круиз - контроль является технологией беспилотного ТС первого уровня.
Недостатками вышеуказанного известного способа является невозможность его реализации в ТС раннего поколения, не имеющих специальных систем взаимодействия и реагирования на управляющие команды адаптивного - круиз-контроля. Кроме того, система адаптивного круиз-контроля не рассчитывает безопасную дистанцию в зависимости от скорости движения ТС. Исследование человеческого фактора, проведенное 2018 году специалистами автошколы «Хайвэй» (https://www.avtoshkola-highway.ru) в Ховрино (район в Северном административном округе Москвы), оценивало влияние использования адаптивного круиз-контроля на время реакции и ситуационную осведомленность при управлении ТС. Ожидалось, что адаптивный круиз-контроль позволит водителям тратить больше времени на наблюдение за опасностями при вождении. Однако исследование выявило, что ситуационная осведомленность и быстрое реагирование ухудшились из-за того, что водители взяли на себя дополнительные задачи внутри машины, не связанные с вождением (https://www.avtoshkola-highway.ru/559-preimuschestva-i-nedostatki-kruiz-kontrolya.html).
Наиболее близким предлагаемому техническому решению является способ, включающий измерение расстояния и определение минимально безопасной дистанции между ТС, в котором определение минимально безопасной дистанции до сзади движущегося ТС, необходимой для его экстренного безаварийного торможения при скорости движения впереди движущегося ТС, и измерение расстояния до сзади движущегося ТС осуществляют на впереди движущемся ТС, сравнивают расстояние до сзади движущегося ТС со значением минимально безопасной дистанции, в случае, если дистанция нарушена, информируют водителя сзади движущегося ТС о нарушении безопасной дистанции прерывистым сигналом задних световых приборов, информирующих о торможении, при этом дополнительно оповещают водителя впереди движущегося ТС световым и/или звуковым сигналом устройства, установленного в его кабине (патент РФ №2616114, опубл. 12.04.2017).
Несмотря на то, что известный способ позволяет предупредить водителя заднего ТС о нарушении безопасной дистанции прерывистым свечением стоп-сигналов, он не обеспечивает безопасность ТС, так как:
1. Отсутствует возможность расчета минимально безопасной дистанции, необходимой для экстренного безаварийного торможения, с которой производится сравнение измеренной дистанции до сзади движущегося ТС.
2. Отсутствует учет опасности попутного столкновения на низких скоростях, при которых определенная известным способом минимально безопасная дистанция будет меньше измеренной. Это важно в случаях торможения ТС перед перекрестками, пешеходными переходами и в автомобильных пробках.
3. Отсутствует учет влияния времени суток и погодных условий на величину определяемой минимально безопасной дистанции между ТС.
4. Не учитывается влияние реакции водителя заднего ТС на алгоритм зажигания в прерывистом режиме стоп-сигналов переднего ТС.
При этом следует учесть, что дистанция, которую должен соблюдать водитель заднего ТС, не имеет точного значения и поэтому она практически не может однозначно называться минимально безопасной дистанцией. То есть, минимально безопасная дистанция не может быть четко определена как некая константа, так как зависит от параметров (факторов), среди которых множество неопределенных, таких как: состояние шин, масса ТС, четкость работы тормозных механизмов, наличие систем помощи при торможении (https://kombinaty.ru/tormozput/chto-harakterizuet-effektivnost-tormozheniya-avtomobilya), а также особенность стиля вождения, возраст водителя, усталость, наличие болезней. Кроме того, при определении минимально безопасной дистанции не учитываются время суток и погодные условия, а также не менее важный параметр - относительная разность скоростей движения сближающихся ТС.
Задачей предлагаемого изобретения является повышение внимательности водителей к процессу соблюдения условно безопасной дистанции между движущимися друг за другом ТС за счет опережающего (превентивного) оповещения водителя заднего ТС о небезопасном сближении с передним ТС, которое потенциально может привести к попутному столкновению из-за нехватки необходимого расстояния до переднего ТС для полной безаварийной остановки в случае резкого торможения или быстрого снижения скорости переднего ТС.
Технический результат заключается в повышении безопасности ТС, движущихся по одной полосе друг за другом.
Поставленная задача решается тем, что в способе предотвращения столкновения транспортных средств, движущихся друг за другом по одной полосе, характеризующемся тем, что на впереди, движущемся транспортном средстве определяют условно безопасную дистанцию до сзади движущегося транспортного средства, измеряют расстояние до сзади движущегося транспортного средства и сравнивают его со значением условно безопасной дистанции, в случае, если условно безопасная дистанция нарушена, зажигают стоп-сигналы переднего транспортного средства в прерывистом режиме с длительностью их свечения равной одной секунде и с интервалом между зажиганиями равным трем секундам, в случае, если сзади движущееся транспортное средство продолжает сближение с впереди движущимся транспортным средством на дистанцию менее половины условно безопасной, или если сближается с ним на расстояние менее четырех м, независимо от скорости движения переднего транспортного средства, зажигают стоп-сигналы переднего транспортного средства в прерывистом режиме с длительностью их свечения равной одной секунде, с интервалом между зажиганиями равным одной секунде, при этом условно безопасную дистанцию определяют по формуле:
L=V*T*k1*k2, где
L - условно безопасная дистанция, м;
V - скорость переднего транспортного средства, м/с;
Т - время реакции водителя заднего транспортного средства, с;
k1 - повышающий коэффициент времени суток;
k2 - повышающий коэффициент погодных условий.
Условно безопасная дистанция - это расстояние между движущимися друг за другом по одной полосе в попутном направлении ТС, определяемое с учетом всех выраженных в цифровых значениях в данном конкретном моменте движения факторов, которое в случае внезапного торможения или резкого замедления переднего ТС позволит водителю заднего ТС своевременно среагировать и предотвратить столкновение с передним ТС за счет торможения без осуществления более сложного и опасного маневра.
Введение понятия «условно безопасная дистанция» обусловлено неопределенностью известных на данный момент понятий «безопасная дистанция» и предлагаемых способов ее определения во время движения, например:
1. Правила дорожного движения Российской Федерации, пункт 9.10. «Водитель должен соблюдать такую дистанцию до движущегося впереди транспортного средства, которая позволила бы избежать столкновения, а также необходимый боковой интервал, обеспечивающий безопасность движения» (https://pdd2023.ru).
2. Так называемый «дедовский способ». Этот метод применяли ранее, когда современная электроника практически отсутствовала. В старых советских учебных пособиях по вождению этот метод называется «скорость надвое». Текущую скорость автомобиля делят пополам. Получившийся результат является безопасным расстоянием до впереди движущегося ТС.
3. Правило «двух секунд». На дороге примечают ориентир с последующим отслеживанием проезда его автомобилем с добавлением 2 с. Если маячок при маневре оказался позади - увеличивают расстояние, впереди - уменьшают (https://avtoshkolamos1t.ru/articles/bezopasnaya-distantsia).
4. Правило «трех секунд» предложен экспертами центра «Движение без опасности». Расчет дистанции на основании этого правила необходимо проводить во временных отрезках: до впереди идущего транспорта должен быть не меньше 3 с. В среднем водителю нужно 1,5 с, чтобы среагировать и нажать на педаль тормоза. Тормоза сработают примерно за 0,5 с. Оставшаяся 1 с - запас между двумя автомобилями. В качестве ориентира предлагается использовать какие-либо стационарные ориентиры, например, фонари, деревья или рекламные щиты (https://bezdtp.ru/bezdtp/ru/events/o_11884).
Как видно, имеются расхождения в рекомендациях водителям по соблюдению безопасной дистанции. Все вышеперечисленные правила и способы определения безопасной дистанции однозначно не могут обеспечить в реальных дорожных условиях соблюдение безопасной дистанции и являются, по сути, лишь не более чем формализованными рекомендациями.
Предлагаемая формула вычисления условно безопасной дистанции позволяет учитывать такие факторы, как V - скорость движения переднего ТС в данный момент, м/с; Т - время реакции водителя заднего ТС, которое соответствует отрезку времени от момента восприятия водителем заднего ТС сигнала о необходимости торможения (начала свечения стоп-сигналов переднего транспортного средства) до совершения необходимых для торможения действий (нажатия на педаль тормоза), с; а также влияние погодных условий и времени суток за счет введения повышающих коэффициентов погодных условий k1 и времени суток k2, необходимых для более точного определения условно безопасной дистанции.
Результаты социологических исследований показывают, что большинство водителей определяют безопасную дистанцию неоднозначно, так как восприятие расстояния у каждого человека субъективно (https://bezdtp.ru/bezdtp/ru/events/o_8028).
Время Т - время реакции водителя, является параметром, который установлен множеством экспериментов, проведенных в Российских и зарубежных научно - исследовательских лабораториях. Различают латентный и моторный периоды времени реакции. Латентный (скрытый) период - это время, необходимое водителю для осознания, оценки ситуации и принятия решения о начале моторной (двигательной) реакции. Соответственно, моторный период - это интервал времени от начала двигательной реакции до момента начала воздействия на орган управления автомобилем.
В лабораторных исследованиях было зафиксировано различие во времени начала моторной реакции в случае, если внешние сенсорные раздражители были ожидаемые и неожиданные. Оказалось, что время реакции на ожидаемые и неожиданные сигналы существенно различается. Сокращение времени реакций может возникать, если водитель предвидит возможную опасную ситуацию. Экспериментально установлено, что время реакций на предупреждающий сигнал меньше, чем на этот же сигнал без предупреждения. При неожиданных сигналах увеличивается не только средняя величина, но и разброс времени реакции (Тартаковский Д.Ф. Проблемы неопределенности данных при экспертизе дорожно-транспортных происшествий. - СПб: Издательство Р. Асланова «Юридический центр Пресс», 2006. - 268 с. Глава 7.1. «О неопределенности справочных значений времени реакции водителя»), (Психологические особенности человека при управлении автомобильным транспортом: учебное пособие / В.Я. Буйленко, С.В. Жанказиев, В.В. Дементиенко, Ю.А. Короткова, М.В. Гаврилюк. - М.: МАДИ, 2017. - 172 с.).
Необходимость введения в формулу расчета условно безопасной дистанции, коэффициента погодных условий и коэффициента времени суток продиктована значительным вилянием временных и погодных факторов на реакцию водителей и соответственно длину дистанции, которую необходимо соблюдать, чтобы избежать попутного столкновения. Туман, пылевая буря, ливень и обильный снегопад могут значительно снизить видимость на дороге, значительно ухудшить сенсорное восприятие и усложнить адекватное реагирование водителя ТС, движущегося сзади на сокращение дистанции, и, соответственно, увеличить время реакции водителя на свечение стоп-сигналов переднего ТС. (https://trasscom.ru/blog/pogoda-na-doroge). Время реакции водителя - это время, разделяющее сенсорный сигнал об изменении дорожной обстановки, полученный органами чувств водителя, и начало воздействия им на органы управления ТС (https://voditeliauto.ru/voditeli-avtomobilej/ot-chego-zavisit-vremya-reakcii-voditelya.html). Кроме того, в дождь и гололед коэффициент сцепления с дорогой снижается минимум в 1,5 раза, а это может иметь значение при торможении ТС, движущихся друг за другом, особенно в условиях разности их скоростей, то есть относительного сближения из-за более медленного движения переднего ТС по сравнению с задним, догоняющим ТС (https://www.zr.ru/content/articles/917756-distantsiya-i-bokovoj-interval). Кроме того, влияние времени суток на реакцию водителя обусловлено биологическими часами человеческого организма. В вечернее и ночное время реакции водителя на сенсорные сигналы переднего транспортного средства могут увеличиваться в несколько раз (https://voditeliauto.ru/voditeli-avtomobilej/ot-chego-zavisit-vremya-reakcii-voditelya.html).
Более раннее оповещение водителя заднего ТС свечением стоп-сигналов в прерывистом режиме повышает внимательность водителя заднего ТС и тем самым сокращает время его реакции в случае резкого изменения условий движения переднего ТС, а также создает визуально понятный маркер условно безопасной дистанции. Прерывистый режим работы стоп-сигналов значительно повышает внимательность водителей. Согласно заводским тестам компании Mercedes-Benz и других автоконцернов, мигающие стоп-сигналы движущегося впереди автомобиля привлекают внимание водителя заднего ТС в среднем на 0,2 с раньше постоянно горящих. На скорости 100 км/ч, этот режим свечения стоп-сигналов создает запас тормозного пути в 5,5 м (https:/www.kolesa.ru/article/stop-signal-sporim-vy-ne-vse-o-nem-znaete).
Кроме того, необходимо учитывать сближение ТС друг с другом и на малых скоростях, например при торможении перед светофором, перед пешеходным переходом или в автомобильных пробках. Во время данных действий скорость ТС близка к самым минимальным значениям, и при этом опасность попутного столкновения также имеет место из-за неправильного выбора дистанции между ТС. Самым опасным этапом в данных ситуациях бывает начало движения после торможения. Заднее ТС сближается с передним во время остановки на дистанцию, не достаточную для запаса тормозного пути. Когда стоп - сигналы переднего ТС гаснут, водитель заднего ТС воспринимает это как начало движения и следует за передним ТС, поэтому в случае каких-то непредвиденных дорожных ситуаций может не успеть среагировать на резкую остановку переднего ТС, вследствие чего может произойти ДТП из-за несоблюдения дистанции.
В данном изобретении предлагается выбрать минимальную дистанцию сближения менее четырех м, при нарушении которой при любой скорости движения переднего ТС стоп-сигналы будут зажигаться в прерывистом режиме даже после того, как водитель переднего ТС отпустит педаль тормоза и его ТС начнет движение. Стоп-сигналы переднего ТС будут прерывисто зажигаться до увеличения дистанции между ТС на расстояние более четырех м.
Минимальная дистанция сближения менее четырех м, на которой, зажигают стоп-сигналы ТС в прерывистом режиме, выбрана исходя из нормативов, закрепленных в правилах дорожного движения (п. 20.3. «При буксировке на гибкой сцепке должно быть обеспечено расстояние между буксирующим и буксируемым транспортными средствами в пределах 4 - 6 м, а при буксировке на жесткой сцепке - не более 4 м»). Наиболее оптимальный диапазон длины троса для обеспечения безопасности буксировки автомобиля находится именно в промежутке от 4 до 6 м. Данные требования не случайны, они продиктованы многолетней практикой при буксировке ТС. Если в процессе буксировки будет использоваться очень короткий трос, и его длина не будет достигать четырех м, очень велика вероятность столкновения ТС при осуществлении маневров на дороге (https://auto.today/bok/3730-dlina-trosa-pri-buksirovke.html).
По мнению аналитика по ДТП немецкого транспортного агентства Dekra (www.dekra.com), своевременное привлечение внимания водителя заднего ТС к мигающим стоп-сигналам впереди движущегося ТС способно значительно сократить число столкновений с впереди идущим ТС и может позволить уменьшить процент попутных ДТП. Он считает, что в мигающих стоп-сигналах скрыт огромный потенциал по сокращению попутных столкновений ТС, и это доказано на практике - человек больше реагирует на динамический раздражитель, чем на статический (https://espaclub.ru/auto/1279.php).
В исследованиях специалистов зарубежных автомобильных компаний высказывается гипотеза о том, что информативность мигающих стоп-сигналов влияет на внимание и реакцию водителя заднего ТС, тем самым создавая предпосылки для снижения вероятности попутных столкновений. Значение имеет структура, частота и продолжительность мигания стоп-сигналов.
Предлагаемый согласно изобретению режим зажигания стоп-сигналов переднего ТС с длительностью их свечения, равной одной секунде, с интервалом между зажиганием стоп-сигналов, равным одной секунде и трем секундам в зависимости от величины нарушенной условно безопасной дистанции, позволяет имитировать режим притормаживания переднего ТС, так как длительное свечение информирует водителя заднего ТС о торможении переднего ТС, а более частое зажигание стоп-сигналов (более высокая частота моргания) воспринимается как сигнал экстренного торможения переднего ТС, так как на некоторых современных ТС реализована система под аббревиатурой ESS (ESS - Emergency Stop Signal). ESS предполагает высокую частоту моргания стоп-сигналами переднего ТС именно в момент экстренного торможения. Частота моргания при этом режиме работы ESS может быть значительно выше, чем у аварийных световых приборов ТС (https://voditeliauto.ru/poleznaya-informaciya/bezopasnost/sistema-ess.html).
Таким образом, учет совокупности таких факторов, как время реакции водителя сзади движущегося ТС, скорость переднего ТС, коэффициенты погоды и времени суток, а также режим моргания (зажигания) стоп-сигналов переднего ТС, позволяет наиболее точно определять условно безопасную дистанцию во время движения ТС друг за другом по одной полосе и тем самым повысить внимание воителя заднего ТС, сократить время его реакции на резкое изменение дорожной обстановки перед его ТС и в итоге, сократить столкновения по причине несоблюдения дистанции.
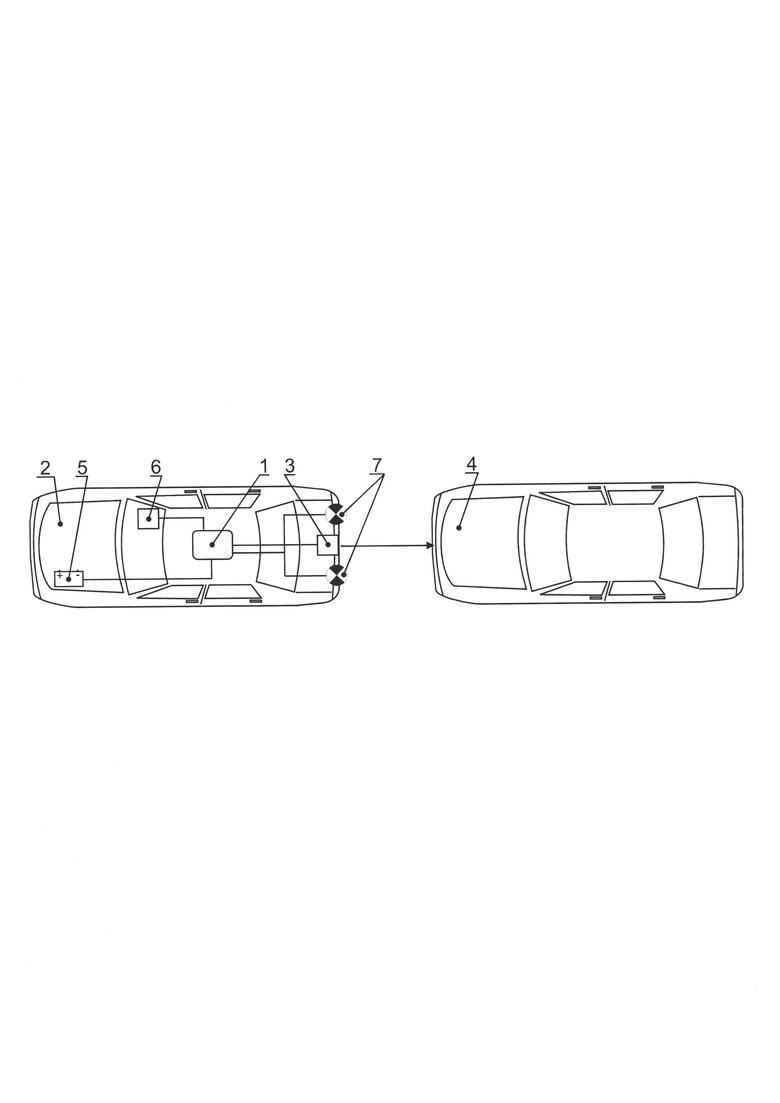
Способ реализован в устройстве для предотвращения столкновений транспортных средств, движущихся друг за другом по одной полосе (см. чертеж).
Устройство состоит из электронного блока управления (ЭБУ) 1, установленного на переднем ТС 2, датчика-измерителя 3, установленного на задней части переднего ТС 2 для измерения расстояния до заднего ТС 4. ЭБУ 1 подключен к электропитанию 5 ТС 2. К ЭБУ 1 подключены датчик-измеритель 3 и модуль определения скорости 6 ТС 2. В качестве световых приборов, отвечающих за информирование водителя заднего ТС 4, используют источники свечения красного света (стоп-сигналы) 7, также подключенные к ЭБУ 1.
В качестве датчика-измерителя 3 для измерения расстояния могут быть использованы микроволновый датчик Радар (Radar - radio detection and ranging) или Лидар (Lidar - Light Detection and Ranging), имеющие возможность измерять расстояние до объекта и фиксировать его перемещение (приближение, удаление), а также стерео камеры и камеры компьютерного зрения с возможностью видео захвата и распознавания объекта (транспортного средства).
В качестве модуля определения скорости 6 используют ГЛОНАСС/GPS -модуль или модуль, имеющий возможность принимать сигналы других спутниковых систем, таких как Galileo, BeiDou.
ЭБУ 1 состоит из микроконтроллера, плат расширения, различных электронных и технологических элементов, разъемов, собранных в одном корпусе с целью обработки входящих и выработки исходящих управляющих сигналов, и представляет собой электронное устройство, реализующее алгоритм определения безопасной дистанции до заднего ТС 4 в соответствии с инсталлированным в него программным обеспечением, вычисляющим условно безопасную дистанцию в соответствии с заложенными в его программное обеспечение параметрами.
Устройство работает следующим образом:
Во время движения ТС 2 ЭБУ 1, подключенный к электропитанию бортовой сети 5 ТС 2, получает от модуля определения скорости 6 данные о скорости ТС 2, в соответствии с которыми вычисляет условно безопасную дистанцию. Также ЭБУ 1 получает данные о расстоянии до заднего ТС 4 от датчика-измерителя 3. ЭБУ 1 сравнивает информацию о расстоянии до ТС 4 с вычисленной им условно безопасной дистанцией для получения ответа «НЕТ» или «ДА». «НЕТ» означает, что расстояние до ТС 4 превышает условно безопасную дистанцию, «ДА» означает, что расстояние до ТС 4 равно или меньше безопасной дистанции. По результатам вычисления ЭБУ 1 подает соответствующие команды: в случае получения «ДА» - зажигает стоп-сигналы 7 ТС 2 в прерывистом режиме зажигания с длительностью их свечения равной 1 с и интервалом между зажиганиями равным 3 с. В случае получения от датчика-измерителя 3 информации о продолжении сокращения дистанции от ТС 2 до ТС 4 и приближении ТС 4 к ТС 2 на расстояние в половину вычисленной условно безопасной дистанции ЭБУ 1 зажигает стоп-сигналы 7 в прерывистом режиме с длительностью свечения равной 1 с и с интервалом между зажиганиями, равным 1 с. В случае приближения ТС 4 до ТС 2 на расстояние менее 4 (четырех) м, независимо от скорости движения ТС 2 и вычисленной при этом ЭБУ 1 условно безопасной дистанции, зажигают стоп-сигналы 7 в прерывистом режиме с длительностью свечения стоп-сигналов 7, равной 1 с, с интервалом между зажиганиями равным 1 с.
Условно безопасную дистанцию определяют по формуле:
L=V*T*k1*k2, где
L - условно безопасная дистанция, м;
V - скорость переднего транспортного средства, м/с;
Т - время реакции водителя заднего ТС, с;
k1 - повышающий коэффициент времени суток;
k2 - повышающий коэффициент погодных условий.
Время реакции водителя заднего ТС выбирают из диапазона значений 0,8-1,0 с, которые определены экспериментально. Коэффициент k1 - фиксированное значение равно 1,0 - светлое время суток; 1,5 - темное время суток. Коэффициент k2 - фиксированное значение равно 1,0 - нормальные погодные условия, без осадков; 1,5 - дождь, снегопад; 2,0 - туман, снежная метель, песчаная буря.
Например, для скорости движения ТС 2, равной 36 км/ч (10 м/с), при времени реакции Т равной 1,0 с, в вечернее время (k1 - 1,5), во время дождя (k2 - 1,5), расчет производят следующим образом: - 10 м/с умножить на 1,0 с, умножить на 1,5, умножить на 1,5. В результате расчета по заявленной формуле получают L, равную 22,5 м.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО СВЕТОВОЙ СИГНАЛИЗАЦИИ В АВТОМОБИЛЕ | 1995 |
|
RU2139204C1 |
| Способ предотвращения столкновения транспортных средств | 2015 |
|
RU2616114C1 |
| Способ предотвращения столкновения транспортных средств | 2021 |
|
RU2772292C1 |
| СПОСОБ И УСТРОЙСТВО СВЕТОВОЙ СИГНАЛИЗАЦИИ В АВТОМОБИЛЕ | 2000 |
|
RU2174922C1 |
| Устройство для информирования водителя автомобиля об условиях обгона | 2021 |
|
RU2755645C1 |
| СИСТЕМА ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ТРАНСПОРТНОГО СРЕДСТВА | 2002 |
|
RU2209146C1 |
| СИСТЕМА ДЛЯ ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ТРАНСПОРТНОГО СРЕДСТВА | 2003 |
|
RU2238197C1 |
| Способ управления движением транспортных средств с системами помощи водителю в среде "интеллектуальная транспортная система - транспортное средство - водитель" | 2021 |
|
RU2774261C1 |
| СПОСОБ ИНДИКАЦИИ ТОРМОЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2004 |
|
RU2330770C2 |
| СПОСОБ ИНДИКАЦИИ ТОРМОЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2011 |
|
RU2502616C2 |
Изобретение относится к способу предотвращения столкновения транспортных средств, движущихся друг за другом по одной полосе. При осуществлении способа измеряют расстояние до сзади движущегося транспортного средства и сравнивают его со значением условно безопасной дистанции. Если условно безопасная дистанция нарушена, зажигают стоп-сигналы переднего транспортного средства в прерывистом режиме. Если сзади движущееся транспортное средство продолжает сближение с впереди движущимся транспортным средством, интервал между зажиганиями уменьшается. Условно безопасную дистанцию определяют по формуле L=V*Т*k1*k2, где L - условно безопасная дистанция, м; V - скорость переднего транспортного средства, м/с; Т - время реакции водителя заднего транспортного средства, с; k1 - повышающий коэффициент времени суток; k2 - повышающий коэффициент погодных условий. Достигается повышение безопасности транспортных средств, движущихся по одной полосе. 1 ил.
Способ предотвращения столкновения транспортных средств, движущихся друг за другом по одной полосе, характеризующийся тем, что на впереди движущемся транспортном средстве определяют условно безопасную дистанцию до сзади движущегося транспортного средства, измеряют расстояние до сзади движущегося транспортного средства и сравнивают его со значением условно безопасной дистанции, в случае если условно безопасная дистанция нарушена, зажигают стоп-сигналы переднего транспортного средства в прерывистом режиме с длительностью их свечения, равной одной секунде., и с интервалом между зажиганиями, равным трем секундам., в случае если сзади движущееся транспортное средство продолжает сближение с впереди движущимся транспортным средством на дистанцию менее половины условно безопасной или если сближается с ним на расстояние менее четырех метров, независимо от скорости движения переднего транспортного средства, зажигают стоп-сигналы переднего транспортного средства в прерывистом режиме с длительностью их свечения, равной одной секунде., с интервалом между зажиганиями, равным одной секунде, при этом условно безопасную дистанцию определяют по формуле
L=V*Т*k1*k2,
где L - условно безопасная дистанция, м;
V - скорость переднего транспортного средства, м/с;
Т - время реакции водителя заднего транспортного средства, с;
k1 - повышающий коэффициент времени суток;
k2 - повышающий коэффициент погодных условий.
| СПОСОБ И УСТРОЙСТВО СВЕТОВОЙ СИГНАЛИЗАЦИИ В АВТОМОБИЛЕ | 2000 |
|
RU2174922C1 |
| RU 2004123318 A, 20.10.2006 | |||
| Способ предотвращения столкновения транспортных средств | 2015 |
|
RU2616114C1 |
| Способ автоматического обеспе-чЕНия бЕзОпАСНОй диСТАНции МЕждудВижущиМиСя ТРАНСпОРТНыМиСРЕдСТВАМи | 1976 |
|
SU794574A1 |
| СПОСОБ И УСТРОЙСТВО СВЕТОВОЙ СИГНАЛИЗАЦИИ В АВТОМОБИЛЕ | 1995 |
|
RU2139204C1 |

