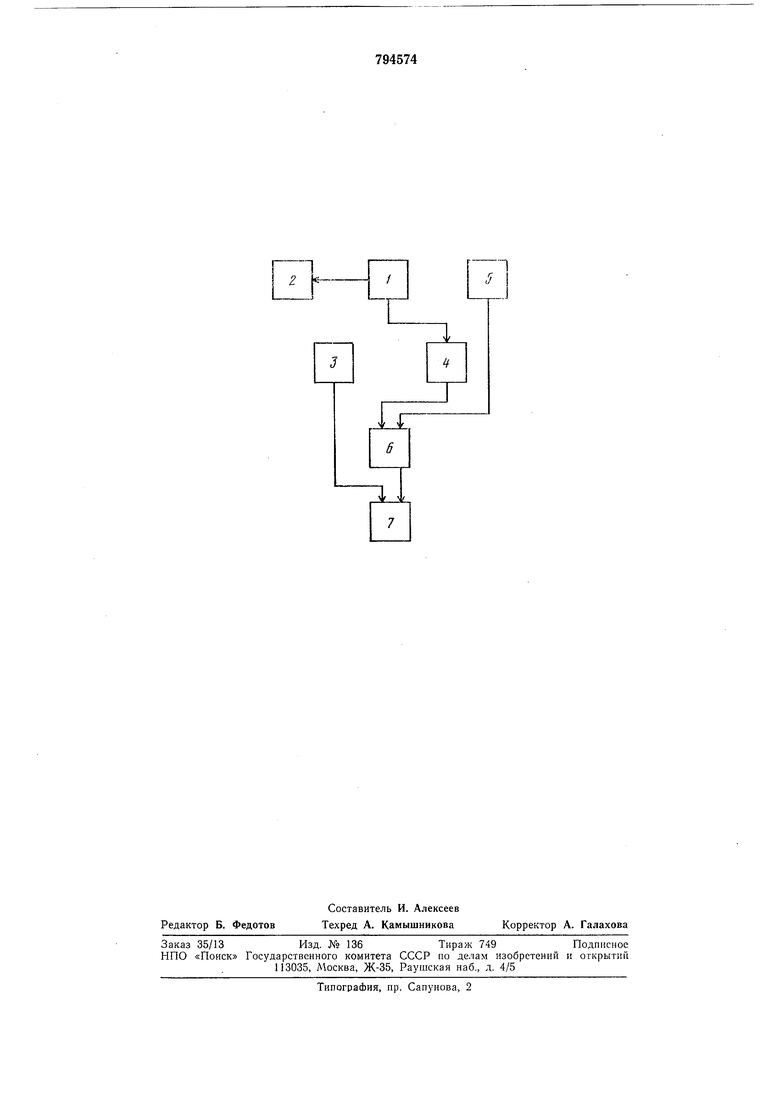
По скорости движения, эксплуатационнотормозной динамичности собственного транспортного средства и состоянию и планиметрическим параметрам дорожного полотна в блоке 1 определяют тормозной путь собственного транспортного средства. Информацию 2 о тормозном пути собственного транспортного средства, определенном в блоке 1, передают идущему сзади транспортному средству. Измерение дистанции между собственным и впереди идущим транспортным средством осуществляется в блоке 3. По величине тормозного пути собственного транспортного средства вычисляют в блоке 4 безопасную дистанцию между собственным и впереди идущим транспортным средством. В блоке 5 от впереди идущего транспортного средства принимают информацию о его тормозном пути, поступающую далее в блок 6, в котором корректируется безопасная дистанция, вычисленная в блоке 4.
Коррекция безопасной дистанции осуществляется в пределах до установленной минимальной величины, определяемой величиной необходимого и достаточного запаса дистанции между движущимися транспортными средствами для введения в действие тормозной системы собственного транспортного средства при возникновении потребности ее увеличения. Воздействие на исполнительный механизм 7 собственного транспортного средства осуществляется сигналом, пропорциональным разности между скорректированной в блоке 6 безопасной дистанцией и измеренной в блоке 3 дистанцией до впереди идущего транспортного средства.
Если безопасная дистанция меньще измеренной, воздействие на исполнительный механизм сводится к оповещению водителя о наличии резерва безопасной дистанции. В этом случае водитель по своему усмотрению, в зависимости от дорожно-транспортной ситуации, может сократить или сохранять прежней дистанцию до впереди идущего транспортного средства. Если измеренная в блоке 3 дистанция меньще
безопасной, воздействие на исполнительный механизм обеспечивает снижение скорости движения собственного транспортного средства, в результате чего происходит 5 увеличение дистанции до впереди идущего транспортного средства до безопасной.
Использование данного способа автоматического обеспечения безопасной дистанции между движущимися транспортными
0 средствами позволяет сократить безопасную дистанцию меладу транспортными средствами и повысить плотность транспортных потоков, что позволит использовать дополнительные резервы пропускной
5 способности дорог без снижения безопасности движущихся транспортных средств.
Формула изобретения
Способ автоматического обеспечения
0 безопасной дистанции между движущимися транспортными средствами, включающий определение тормозного пути собственного транспортного средства, измерение дистанции между транспортными средствами, вычисление безопасной дистанции между транспортными средствами и воздействие на исполнительный механизм с обеспечением дистанции между транспортными средствами, не меньщей вычисленной безопасной дистанции, отличающийся тем, что, с целью уменьшения безопасной дистанции и повыщения плотности транспортных потоков, принимают информацию о величине тормозного пути впереди идущего транспортного средства, производят корректировку безопасной дистанции на разность в тормозных путях собственного и впереди идущего транспортного средства в пределах до установленной минимальной
величины и передают информацию о величине тормозного пути собственного транспортного средства идущему сзади транспортному средству.
.Источники информации,
принятые во внимание при экспертизе
1. Патент США Л 3841427, кл. 180-98, опублик. 1976 (прототип).