Изобретения относятся к стрелковому оружию и могут быть использованы в стрелковом оружии или устройствах, конструктивно схожих со стрелковым оружием.
Известна электронная система стрельбы из стрелкового оружия по патенту US №11300378 от 12.04.2022 г., в которой управление исполнительным механизмом для производства выстрела осуществляется с помощью специального привода, управляемого по команде системы управления, в том числе и от внешнего сигнала.
Недостатком данной системы является сложность конструкции и низкая энергоэффективность из-за отсутствия информации о срабатывании привода. Используемый в конструкции пьезо-привод в условиях повышенной влажности и низкого давления (например, при эксплуатации оружия в высокогорных районах) подвержен риску нарушения изоляции, так как пьезо-привод находится под действием высокого напряжения (±100 В). Также используемый в изобретении электромагнит с замкнутым магнитным полем с открыто расположенной обмоткой имеет высокие характеристики рассеивания, вследствие чего электромагниты данного типа обладают низким коэффициентом полезного действия.
Задачей заявляемых изобретений является улучшение эксплуатационных характеристик стрелкового оружия с электронной системой стрельбы, в том числе в сложных климатических условиях, а именно при воздействии высокой влажности и низкой температуры, пылевом воздействии.
Технический результат достигается за счет увеличения уровня осведомленности пользователя оружия о состоянии электронной системы стрельбы и повышения надежности работы стрелкового оружия за счет использования дополнительных датчиков.
Поставленная задача достигается тем, что стрелковое оружие с электронной системой стрельбы содержит ствольную коробку со спусковым механизмом, предохранительный механизм, электромеханический привод с подвижной частью, выполненный с возможностью срабатывания при производстве выстрела, причем спусковой механизм соединен с подвижной частью электромеханического привода, связанного с внешним источником сигналов через блок управления, который содержит процессор с блоком памяти, силовой ключ привода, датчик вибрации, и источник питания, соединенный со спусковым механизмом, причем электромеханический привод дополнительно содержит датчик положения подвижной части и датчик температуры.
Поставленная задача достигается также тем, что в способе управления стрелковым оружием с электронной системой стрельбы управляющие сигналы с внешнего источника поступают на блок управления, который формирует рабочие сигналы синхронно моментам возникновения вибраций, сопровождающих процесс производства выстрела, подает их на электромеханический привод, приводящий в движение спусковой механизм, производится выстрел, причем блок управления изменяет частоту и скважность рабочих сигналов по данным, поступающим от датчика положения подвижной части электромеханического привода и/либо от датчика температуры электромеханического привода, необходимых для удержания подвижной части электромеханического привода в рабочем положении, в случае поступления управляющих сигналов однократного срабатывания, блок управления прекращает подачу рабочего сигнала на электромеханический привод после получения сигнала с датчика положения подвижной части привода.
Сущность изобретений поясняется чертежами, на которых изображено:
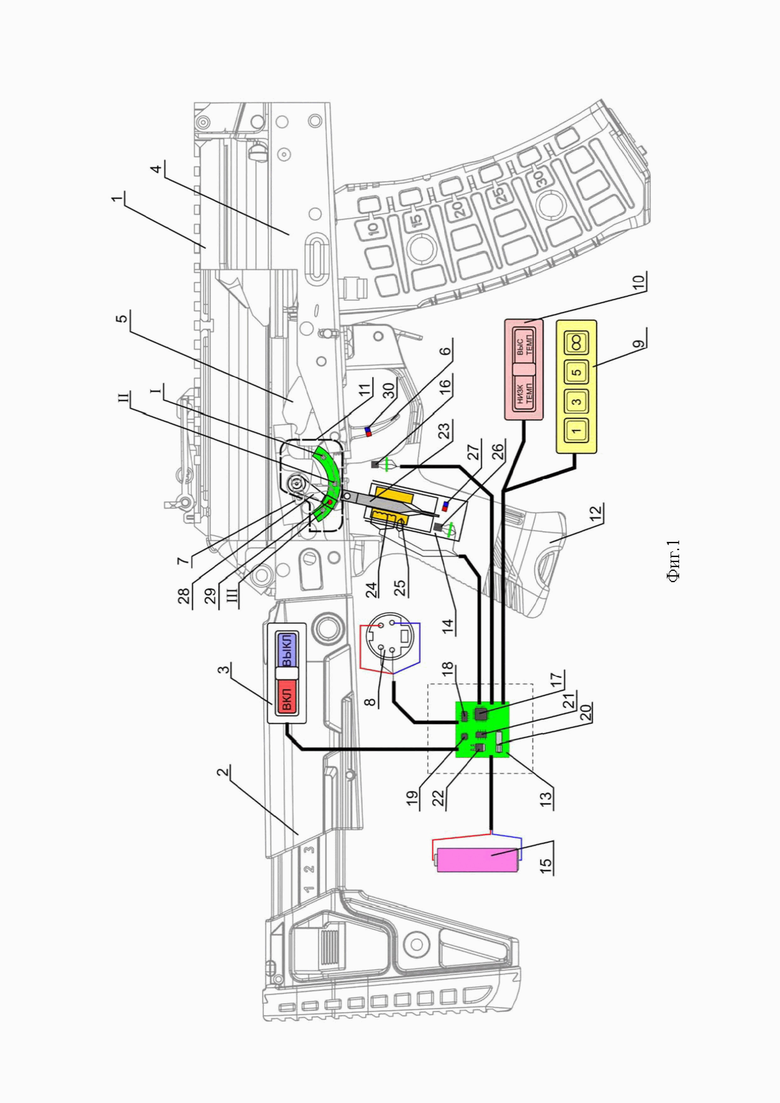
• Фиг. 1 - структурная схема стрелкового оружия с электронной системой стрельбы;
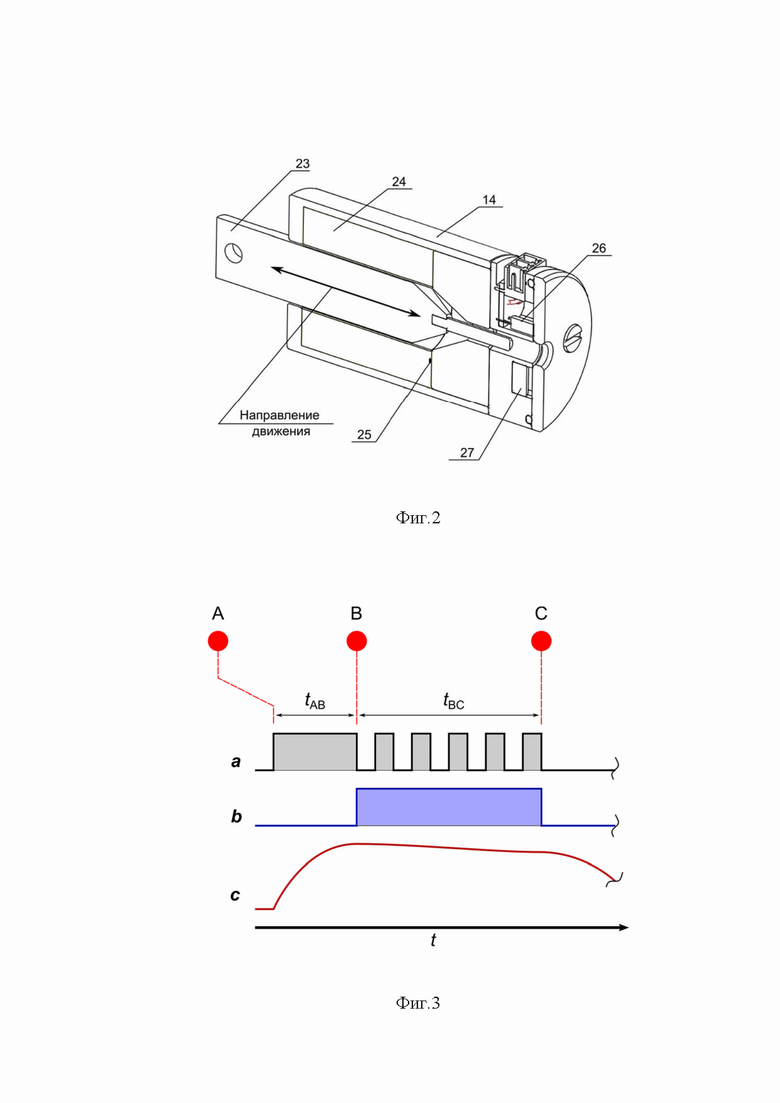
• Фиг. 2 - конструкция электромеханического привода 14 в разрезе;
• Фиг. 3 - графики изменения сигналов от времени:
- a - от процессора 17 на силовой ключ 22;
- b - от датчика 26 положения подвижной части 23 электромеханического привода 14;
- c - от датчика 25 температуры электромеханического привода 14;
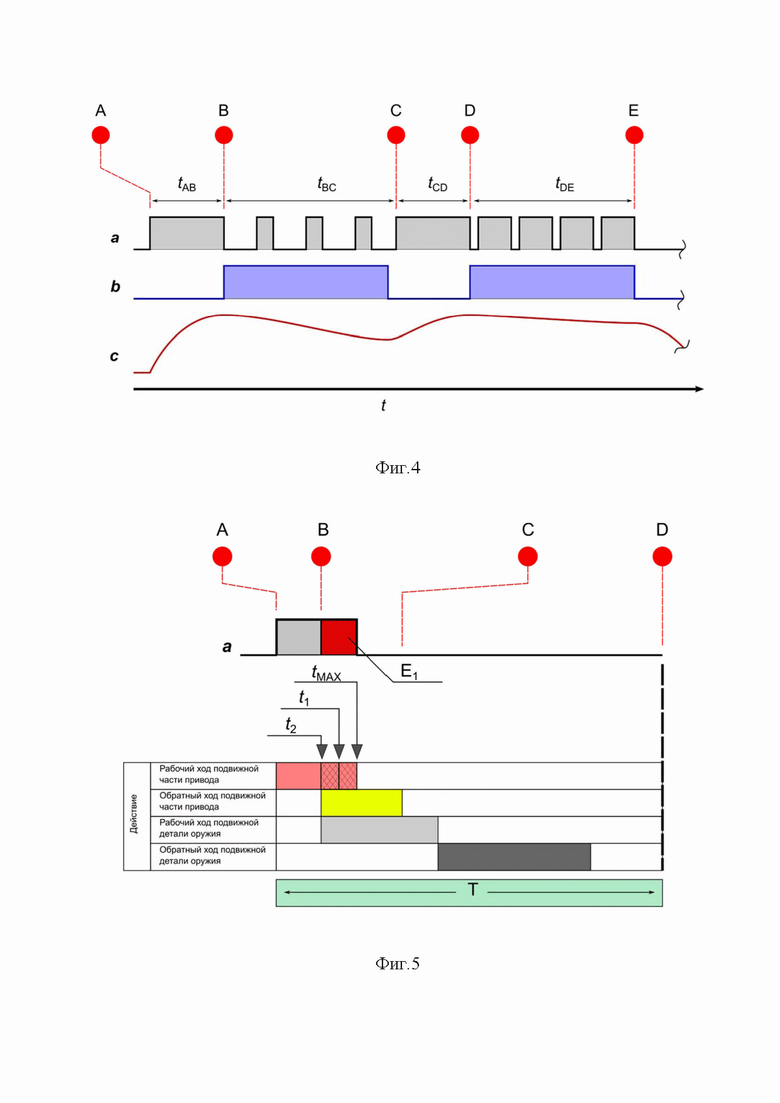
• Фиг. 4 - графики изменения сигналов от времени в условиях коррекции работы электромеханического привода 14 на основе данных от датчика 26 положения подвижной части 23 электромеханического привода 14:
- a - от процессора 17 на силовой ключ 22,
- b - от датчика 26 положения подвижной части 23 электромеханического привода 14,
- c - от датчика 25 температуры электромеханического привода 14;
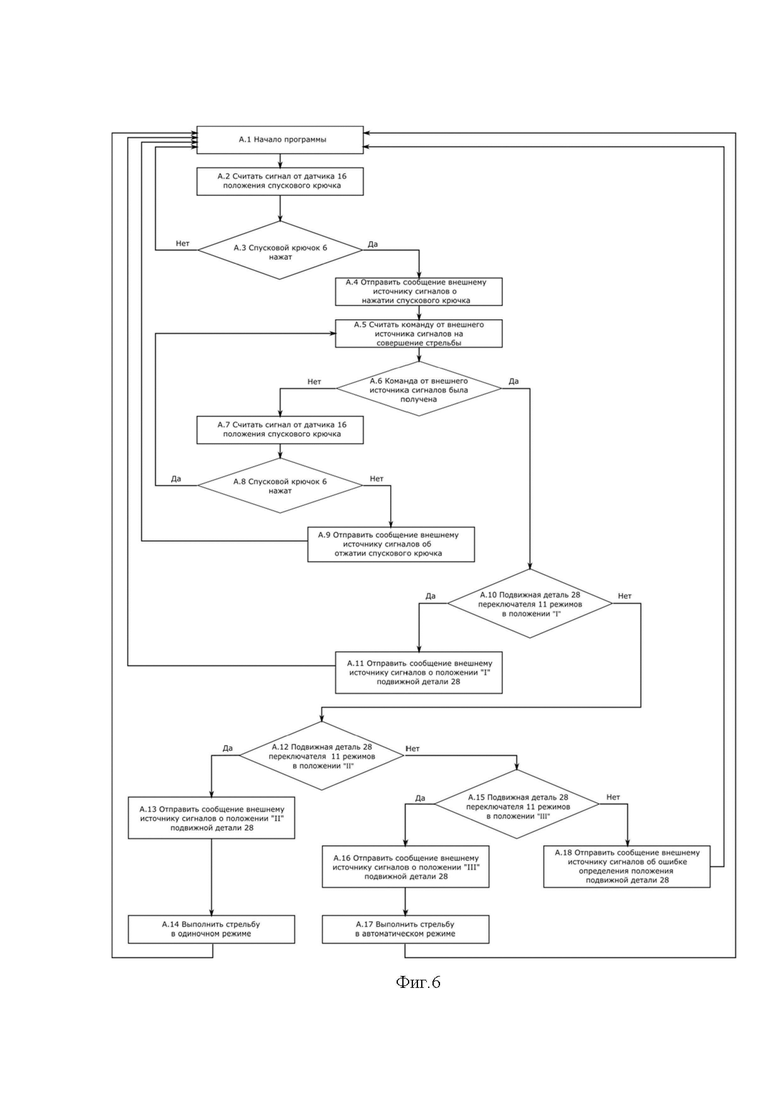
• Фиг. 5 - циклограмма работы оружия с электронной системы стрельбы;
• Фиг. 6 - алгоритм работы блока управления электронной системой стрельбы.
Стрелковое оружие с электронной системой стрельбы включает оружие 1, которое содержит приклад 2, на котором расположен выключатель 3 электронной системы стрельбы; ствольную коробку 4, со спусковым механизмом 5, снабженным спусковым крючком 6 и предохранительным механизмом 7 и с разъёмом 8 (для подключения к внешнему источнику сигналов, который не показан), с переключателем 9 отсечки очереди выстрелов, с переключателем 10 темпа стрельбы, с переключателем 11 режимов работы электронной системы стрельбы; рукоятку 12, в которую интегрирован блок 13 управления электронной системы стрельбы, электромеханический привод 14, источник питания 15, датчик 16 положения спускового крючка 6.
Блок 13 управления электронной системы стрельбы содержит процессор 17, электрически соединенный с контроллером 18 для подключения к внешнему источнику сигналов (не показан), с датчиком 19 вибрации, с индикатором 20 работы электронной системы стрельбы, с контроллером 21 управления источником питания 15, с силовым ключом 22, который в свою очередь соединен с электромеханическим приводом 14. Также процессор 17 электрически соединён с выключателем 3 электронной системы стрельбы, с переключателем 9 отсечки очереди выстрелов, с переключателем 10 темпа стрельбы, с переключателем 11 режимов работы электронной системы стрельбы и с датчиком 16 положения спускового крючка 6.
Электромеханический привод 14 содержит подвижную часть (якорь) 23 со штоком, обмотку 24 с установленным внутри датчиком 25 температуры электромеханического привода 14, а также датчик 26 положения подвижной части 23 электромеханического привода 14. При этом датчик 26 положения подвижной части 23 электромеханического привода 14 может быть выполнен в виде датчика Холла с оппозитно расположенным постоянным магнитом 27 с зазором перекрываемым штоком подвижной части 23 электромеханического привода 14.
Переключатель 11 режимов работы электронной системы стрельбы состоит из подвижной детали 28, выполненной, например, в виде рычага, с закрепленным на ней постоянным магнитом 29. Подвижную деталь 28 переключателя с магнитом 29 перемещают между положениями I (положение «Предохранитель»), II (положение «Режим одиночный»), III (положение «Режим автоматический»), а положениям I, II, III соответствуют установленные, например, датчики Холла.
Датчик 16 положения спускового крючка 6 может быть выполнен в виде датчика Холла с постоянным магнитом 30, установленным в спусковой крючок 6.
С помощью разъема 8 осуществляется зарядка источника питания 15 или подключается электропитание внешнего источника сигнала, который может быть представлен в виде источника аналоговых или цифровых сигналов, которые поступают через разъем 8 на процессор 17.
Управляющий сигнал от внешнего источника сигналов может быть представлен как одним сообщением, либо командой, либо набором сообщений и команд, при этом реализация обмена сигналами между внешним источником сигнала и блоком 13 управления электронной системой стрельбы выбирается исходя из условий обеспечения надежного обмена сообщениями в определенных условиях.
При работе электромеханического привода 14 в режиме стрельбы без отсечки очереди выстрелов в режиме максимального темпа при длительной стрельбе, возможен сбой работы из-за перегрева. Для предотвращения этого использован электромеханический привод 14 с управлением переменным по времени рабочим сигналом с обратной связью в виде сигнала датчика 26 положения подвижной части 23 электромеханического привода 14.
Работа электронной системы стрелкового оружия в данном режиме поясняется графиками изменения сигналов от времени (t) на фиг. 3 и происходит следующим образом:
при возникновении события на включение электромеханического привода 14 (событие А) (например, при работе по алгоритму), процессор 17 подает постоянный рабочий сигнал на силовой ключ 22 (сигнал a), при этом происходит срабатывание электромеханического привода 14 и срабатывание датчика 26 положения подвижной части 23 электромеханического привода 14 (сигнал b), сигнал от датчика 26 положения подвижной части 23 электромеханического привода 14 поступает на процессор 17 (событие B), после чего процессор 17 формирует рабочий сигнал на силовой ключ 22 в виде периодического сигнала, например в виде сигнала широтно-импульсной модуляции в течение времени стрельбы (участок tBC), достаточного для удержания подвижной части 23 электромеханического привода 14. При подаче постоянного сигнала (участок tAB) на силовой ключ 22 происходит интенсивное увеличение температуры обмотки 24, что регистрируется датчиком 25 температуры электромеханического привода 14 (сигнал c), а при подаче периодического сигнала (участок tBC) интенсивное увеличение температуры обмотки прекращается. После завершения стрельбы (событие С), процессор 17 прекращает подачу рабочего сигнала на силовой ключ 22, и происходит отключение электромеханического привода 14, а датчик 26 положения подвижной части 23 электромеханического привода 14 изменяет сигнал. Использование широтно-импульсной модуляции в данном случае позволяет снизить энергопотребление системы, предотвратить перегрев обмотки 24, увеличить надежность работы системы.
Для подтверждения технического результата заявленного технического решения были проведены испытания электроспуска стрелкового оружия на изделии - пулемет, в результате которых была подтверждена возможность длительного включения электроспуска в режиме широтно-импульсной модуляции без перегрева.
Процессор 17 динамически изменяет скважность и частоту сигнала широтно-импульсной модуляции в зависимости от положения подвижной части 23 электромеханического привода 14 по сигналу от датчика 26 положения подвижной части 23 электромеханического привода 14.
Графики изменения сигналов от времени: a - от процессора 17 на силовой ключ 22, b - от датчика 26 положения подвижной части 23 электромеханического привода 14, c - от датчика 25 температуры электромеханического привода 14 приведены на фиг. 3.
Так как эксплуатация оружия связана с воздействием внешних факторов (воздействие температуры, вибрации от установки на транспортные средства и т.д.), в электронной системе стрельбы предусмотрена возможность коррекции работы электромеханического привода 14 на основе данных от датчика 26 положения подвижной части 23 электромеханического привода 14.
Принцип работы электромеханического привода 14 в данном режиме поясняется графиками изменения сигналов от времени (t) на фиг. 4. Так начало работы электромеханического привода 14 (событие A) и начало подачи периодического сигнала (событие B) аналогичны предыдущему режиму работы, наименования сигналов аналогичны предыдущему графику. Коррекция работы электромеханического привода 14 заключается в контроле наличия сигнала от датчика 26 положения подвижной части 23 электромеханического привода 14 при самопроизвольном изменении положения подвижной части 23 электромеханического привода 14 (событие C), при этом процессор 17 переходит в режим постоянной подачи сигнала (участок tCD), а после получения сигнала о срабатывании электромеханического привода 14 от датчика 26 положения подвижной части 23 электромеханического привода 14 (событие C) изменяет величину скважности и частоты сигнала широтно-импульсной модуляции, и переключается на подачу рабочего сигнала в режиме широтно-импульсной модуляции с новой скважностью и частотой сигнала (участок tDE) до момента прекращения стрельбы (событие E). Процессор 17 при этом записывает данные о возникшем событии и данные об измененной величине скважности и частоте сигнала широтно-импульсной модуляции во встроенную память.
Процессор 17 использует информацию о величине напряжения источника питания 15 от контроллера 21 и о температуре электромеханического привода 14 от датчика 25 температуры электромеханического привода 14 для задания величины скважности и частоты сигнала широтно-импульсной модуляции для обеспечения надежной работы электромеханического привода 14. Зависимость величины скважности от температуры, напряжения источника питания 15, а также, например, от заданного темпа стрельбы и отсечки очереди выстрелов хранится во встроенной памяти процессора 17, например, в виде многомерных таблиц или математических зависимостей, которые могут корректироваться процессором 17 в ходе работы.
Графики изменения сигналов от времени в условиях коррекции работы электромеханического привода 14 на основе данных от датчика 26 положения подвижной части 23 электромеханического привода 14: a - от процессора 17 на силовой ключ 22, b - от датчика 26 положения подвижной части 23 электромеханического привода 14, c - от датчика 25 температуры электромеханического привода 14 приведены на фиг. 4.
Для повышения эффективности использования энергии при стрельбе в одиночном режиме или с низким темпом стрельбы (200 - 400 выстрелов в минуту) процессор 17 отключает электромеханический привод 14 после получения сигнала от датчика 26 положения подвижной части 23 электромеханического привода 14 о срабатывании электромеханического привода 14.
Повышение эффективности достигается за счет снижения влияния непостоянства времени срабатывания электромеханического привода 14, а также уменьшения чувствительности к нестабильности напряжения питания системы из-за скачков напряжения и тока при работе электромеханического привода 14 и других потребителей.
Результаты испытаний, а именно - циклограмма и график изменения сигналов приведены на фиг. 5 (для электроспуска пулемета НСВТ, включающего электромеханический привод со следующими характеристиками: потребляемое напряжение U = 27 В и ток I = 10А):
• среднее время срабатывания электромеханического привода  = 30 мсек;
= 30 мсек;
• минимальное время срабатывания = 25 мсек;
= 25 мсек;
• максимальное время срабатывания  =35 мсек;
=35 мсек;
принимаем следующие вероятности срабатывания электромеханического привода:
• для = 30 мсек -  = 50%;
= 50%;
• для= 25 мсек -  = 25%;
= 25%;
• для = 35 мсек -  = 25%;
= 25%;
Начало работы электромеханического привода 14 (событие A) и начало подачи рабочего сигнала (событие B) аналогичны предыдущему режиму работы, сигнал а на графике соответствует сигналу процессора 17 на силовой ключ 22.
При получении от датчика 26 положения подвижной части 23 электромеханического привода 14 информации о срабатывании подвижной части 23 электромеханического привода 14 (событие B) процессор 17 прекращает подачу рабочего сигнала на силовой ключ 22. После прекращения подачи рабочего сигнала на силовой ключ 22 происходит перемещение подвижной части 23 электромеханического привода 14 в начальное положение, и процессор 17 получает от датчика 26 положения подвижной части 23 электромеханического привода14 информацию об отключении электромеханического привода 14 (событие C). Процессор 17 затем ожидает заданное время для обеспечения завершения процесса выстрела (событие D).
Для электромеханического привода 14 без обратной связи, для количества выстрелов N = 400 выстр., настроенного на время срабатывания = 35 мсек потери энергии составят Е1:
= 35 мсек потери энергии составят Е1:


при этом в среднем для совершения одного выстрела требуется энергия Е2:

Таким образом, при использовании сигнала от датчика 26 положения подвижной части 23 электромеханического привода 14, предложенная конструкция стрелкового оружия с электронной системой стрельбы позволяет совершить дополнительно Е1/Е2=540/8,1=67 выстрелов, или использовать энергию для обеспечения дополнительного времени работы (см. фиг. 5).
Электронная система стрельбы повышает надежность работы оружия при эксплуатации в затрудненных условиях или при несрабатывании электромеханического привода 14, которое может быть вызвано загрязнением оружия, появлением наледи в результате воздействия воды и пониженной температуры и т.д.: так при отсутствии сигнала о срабатывании электромеханического привода 14 после подачи рабочего сигнала на силовой ключ 22, процессор 17 выполняет подачу рабочего сигнала периодического вида, например, с частотой близкой к резонансной частоте работы электромеханического привода 14 до момента получения сигнала о срабатывании электромеханического привода 14 от датчика 26 положения подвижной части 23 электромеханического привода 14.
При работе электромеханического привода 14 в режиме резонансной частоты происходит его самоочистка. После чего процессор 17 управляет работой электромеханического привода 14 в обычном режиме.
Повышение надежности работы стрелкового оружия с электронной системой стрельбы достигается также тем, что вибрация оружия используется для отключения и включения электромеханического привода 14, что увеличивает скорость срабатывания электромеханического привода 14, при этом процессор 17 подает или прекращает подачу рабочего сигнала на электромеханический привод 14 спустя заданное время после получения сигнала от датчика 19 вибрации.
Так как электромеханический привод 14 представляет собой привод с замкнутым магнитным потоком и закрытой обмоткой, поле напряженности магнитного потока не выходит за пределы материала магнитопровода, поэтому работа электромеханического привода 14 не оказывает влияние на показания датчика 26 положения подвижной части 23 электромеханического привода 14, представляющего датчик Холла. Для контроля за температурой электромеханического привода 14 в качестве датчика 25 температуры электромеханического привода 14 используется, например, термопара или терморезистор.
Датчик 19 вибрации может быть выполнен в виде пьезодатчика, контактного датчика или иного другого датчика, регистрирующего производство выстрела из оружия для передачи информации в процессор 17.
Датчик 26 положения подвижной части 23 электромеханического привода 14 может быть представлен, например, датчиком Холла аналогового типа (К5331НХ015 - производство ООО «ИДМ-плюс») или цифрового типа (SS340RT - производство компании «Honeywell International») для определения абсолютного положения подвижной части 23 электромеханического привода 14.
В качестве контроллера 18 может, например, использоваться микросхема К5559ИН14АSI или К5559ИН86SI, а в качестве процессора 17 может, например, использоваться микроконтроллер К1986ВЕ92QI производства АО «ПКК Миландр».
Стрелковое оружие с электронной системой стрельбы обеспечивает стрельбу в следующих режимах:
1.1 одиночная стрельба с электромеханическим управлением;
1.2 автоматическая стрельба с электромеханическим управлением;
2.1 одиночная стрельба с электромеханическим управлением от внешнего источника сигналов;
2.2 автоматическая стрельба с электромеханическим управлением от внешнего источника сигналов.
При одиночной стрельбе (режим 1.1) подвижная деталь 28 переключателя 11 режимов установлена в положение II, при этом при нажатии на спусковой крючок 6 постоянный магнит 30, установленный в нем, вызывает срабатывание датчика 16 положения спускового крючка 6, который передает информацию о положении спускового крючка 6 на процессор 17, с которого поступает рабочий сигнал на электромеханический привод 14, который перемещает подвижную часть 23 электромеханического привода 14. Перемещаясь, подвижная часть 23 электромеханического привода 14 приводит в действие спусковой механизм 5 для производства выстрела. А при автоматической стрельбе с электромеханическим управлением (режим 1.2) подвижная деталь 28 переключателя 11 режимов установлена в положение III.
В случае необходимости изменения темпа стрельбы переключателем 10 выбирается необходимый темп стрельбы, а процессор 17 считывает данные о положении переключателя 10. Процессор 17 регулирует время периода срабатывания электромеханического привода 14, вследствие чего срабатывание спускового механизма 5 происходит в определенные моменты времени, соответствующие заданному темпу стрельбы.
В положении III подвижной детали 28 переключателя 11 отсечку количества выстрелов в очереди стрельбы выбирают с помощью переключателя 9, а темп стрельбы - с помощью переключателя 10. Процессор 17 считывает информацию о положениях переключателей 9 и 10. Процессор 17 регулирует количество срабатываний электромеханического привода 14, вследствие чего срабатывание спускового механизма 5 происходит заданное количество раз с определенной частотой. При работе процессор 17 выполняет отсчет количества выстрелов с помощью встроенного счетчика по данным от датчика 19 вибрации. Отсечка количества выстрелов и темп стрельбы могут быть заданы по команде от внешнего источника сигналов.
Аналогично режимам одиночной и автоматической стрельбы с электромеханическим управлением (1.1 и 1.2) в режиме одиночной и автоматической стрельбы с электромеханическим управлением от внешнего источника сигналов (2.1 и 2.2) для производства выстрела электромеханический привод 14 срабатывает при подаче управляющего сигнала от внешнего источника сигналов. Переключение режима работы блока управления 13 на режим управления от внешнего источника сигналов, производится при подключении к разъему 8 внешнего источника сигналов.
Процессор 17 при производстве стрельбы в режимах 2.1 и 2.2 работает следующим образом (фиг. 6):
- выполняется функция А.2 считывания сигнала от датчика 16 положения спускового крючка 6;
- если при проверке А.3 спусковой крючок 6 не был нажат, то процессор 17 возвращается в начало программы;
- если при проверке А.3 был нажат спусковой крючок 6, то процессор 17 выполняет функцию А.4 отправки сообщения внешнему источнику сигналов о нажатии спускового крючка 6;
- процессор 17 ожидает получения команды на совершение стрельбы от внешнего источника сигналов, выполняя функции А.5 считывания команды от внешнего источника сигналов, проверки А.6 получения сигнала на совершение стрельбы, функции А.7 считывания сигнала от датчика 16 положения спускового крючка 6 и проверки А.8 нажатия спускового крючка 6.
Если в период ожидания спусковой крючок 6 не был нажат (условие А.8), то процессор 17 выполняет функцию А.9 отправки сообщения внешнему источнику сигналов об отжатии спускового крючка 6 и возвращается к началу программы А.1.
После получения команды на совершение стрельбы (условие А.6) процессор 17 производит проверку текущего положения подвижной детали 28 переключателя 11 режимов:
• условие А.10 - подвижная деталь 28 переключателя 11 режимов в положении I «Предохранитель», при этом процессор 17 выполняет функцию А.11 отправки сообщения внешнему источнику сигналов о текущем положении подвижной детали 28 переключателя 11 режимов, затем процессор 17 возвращается к началу программы А.1;
• условие А.12 - подвижная деталь 28 переключателя 11 режимов в положении II «Режим одиночный», при этом процессор 17 выполняет функцию А.13 отправки сообщения внешнему источнику сигналов о текущем положении подвижной детали 28 переключателя 11 режимов и выполняется стрельба в одиночном режиме (функция А14);
• условие А.15 - подвижная деталь 28 переключателя 11 режимов в положении III «Режим автоматический», при этом процессор 17 выполняет функцию А.16 отправки сообщения внешнему источнику сигналов о текущем положении подвижной детали 28 переключателя 11 режимов и выполняется стрельба в автоматическом режиме (функция А17).
Если при проверках A.10, A.12, A.15 подвижная деталь 28 переключателя 11 режимов не находится ни в одном из 3-х положений (I, II или III), то процессор 17 выполняет функцию А.18 отправки сообщения внешнему источнику сигналов об ошибке определения положения подвижной детали 28 переключателя 11 режимов.
При выполнении стрельбы в одиночном режиме (функция А.14) процессор 17 подаёт рабочий сигнал на силовой ключ 22 и считывает сигнал от датчика 26 положения подвижной части 23 электромеханического привода 14. Если от датчика 26 положения подвижной части 23 электромеханического привода 14 был получен сигнал о срабатывании электромеханического привода 14, то процессор 17 прекращает подачу сигнала на силовой ключ 22 и возвращается к началу алгоритма. В случае отсутствия сигнала о срабатывании электромеханического привода 14 от датчика 26 положения подвижной части 23 электромеханического привода 14 в течение заданного времени, процессор 17 прекращает подачу сигнала на силовой ключ 22 и возвращается к началу алгоритма.
При выполнении стрельбы в автоматическом режиме (функция А.17), процессор 17 подаёт постоянный сигнал на силовой ключ 22 и считывает сигнал от датчика 26 положения подвижной части 23 электромеханического привода 14. Если в течение заданного времени не был получен сигнал от датчика 26 положения подвижной части 23 электромеханического привода 14 о срабатывании, то процессор 17 прекращает стрельбу в автоматическом режиме.
Если при выполнении стрельбы в автоматическом режиме выбран режим стрельбы без регулировки темпа, то после получения сигнала о срабатывании электромеханического привода 14 от датчика 26 положения подвижной части 23 электромеханического привода 14, процессор 17 подаёт рабочий сигнал с заданной частотой и величиной скважности на силовой ключ 22. В случае стрельбы с регулировкой темпа стрельбы процессор 17 после получения сигнала от датчика 26 положения подвижной части 23 электромеханического привода 14 о срабатывании электромеханического привода 14 прекращает стрельбу в автоматическом режиме.
При стрельбе в автоматическом режиме в случае отключения электромеханического привода 14 процессор 17 выполняет определение и установку новых значений частоты и величины скважности сигнала на силовой ключ 22 и продолжает стрельбу в автоматическом режиме.
Также при стрельбе в автоматическом режиме, процессор 17 выполняет проверку получения команды от внешнего источника сигналов о прекращении стрельбы, получения информации от датчика 16 об изменении положения спускового крючка 6, а также проверку количества совершенных выстрелов по информации от датчика 19 вибрации. Если в ходе стрельбы было выполнено любое из этих условий, то процессор 17 прекращает стрельбу в автоматическом режиме.
При прекращении стрельбы в автоматическом режиме процессор 17 прекращает подачу сигнала на силовой ключ 22, выключает и сбрасывает счетчик количества выстрелов и таймер подачи сигнала, являющийся составной частью процессора, и возвращается к началу алгоритма.
При стрельбе в режиме одиночной стрельбы с электромеханическим управлением (1.1) и автоматической стрельбы с электромеханическим управлением (1.2) процессор 17 после выполнения условия А.3 нажатия спускового крючка 6 сразу переходит к проверке условия А.10 положения подвижной детали 28 переключателя 11 режимов.
Предложенная конструкция стрелкового оружия с электронной системой стрельбы и способ управления позволяют увеличить надежность оружия, его эксплуатационные характеристики и увеличить энергоэффективность системы, что в свою очередь увеличивает время эксплуатации, в том числе при использовании в составе боевых автоматизированных систем, либо в дистанционно управляемых боевых модулях.
Преимуществом, по сравнению с существующими образцами, является использование датчика 26 положения подвижной части 23 электромеханического привода 14, датчика 25 температуры электромеханического привода, а также оригинального способа управления стрелковым оружием с электронной системой стрельбы, при котором управление электромеханическим приводом 14 осуществляется по сигналу от датчиков 25 температуры электромеханического привода и 26 положения подвижной части 23 электромеханического привода 14.
Объем формулы изобретения не ограничивается предложенными вариантами осуществления, изложенными в описании, и может иметь широкое толкование, согласующееся с описанием в целом.
| название | год | авторы | номер документа |
|---|---|---|---|
| Стрелковое оружие с системой управления стрельбой | 2022 |
|
RU2796167C1 |
| Система автоматизированного управления стрелковым комплексом | 2024 |
|
RU2832853C1 |
| СТРЕЛКОВОЕ ЛЕГКОЕ ОРУЖИЕ С АВТОМАТИЗИРОВАННОЙ ЭЛЕКТРОННО-ОПТИЧЕСКОЙ СИСТЕМОЙ ПРИЦЕЛИВАНИЯ И СПОСОБ ПРИЦЕЛИВАНИЯ | 2015 |
|
RU2605664C1 |
| САМОЗАРЯДНОЕ РУЧНОЕ СТРЕЛКОВОЕ ОРУЖИЕ С ИЗБИРАТЕЛЬНЫМИ РЕЖИМАМИ БОЕВОЙ СТРЕЛЬБЫ И УЧЕБНОЙ ИМИТАЦИИ | 2016 |
|
RU2698652C1 |
| СТРЕЛКОВЫЙ ТРЕНАЖЕР И СИСТЕМА ПИСТОЛЕТ-МИШЕНЬ ДЛЯ НЕГО | 2008 |
|
RU2378600C1 |
| Интерактивный лазерный стрелковый тренажер | 2023 |
|
RU2838519C1 |
| ПРИБОР ДЛЯ СТРЕЛЬБЫ СВЕТОЗВУКОВЫМИ ПАТРОНАМИ | 2019 |
|
RU2724831C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЗИРОВАННОГО ПРИЦЕЛИВАНИЯ И ВЫСТРЕЛА ИЗ СТРЕЛКОВОГО ОРУЖИЯ (ЕГО ВАРИАНТЫ) | 2002 |
|
RU2240485C2 |
| ЗАМАСКИРОВАННОЕ РУЧНОЕ ОРУЖИЕ | 1993 |
|
RU2072079C1 |
| Боевой модуль робототехнического комплекса военного назначения с устройством прерывания очереди при стрельбе из автоматического оружия | 2023 |
|
RU2831825C1 |
В способе управления стрелковым оружием с электронной системой стрельбы управляющие сигналы с внешнего источника поступают на блок управления, который формирует рабочие сигналы синхронно моментам возникновения вибраций, сопровождающих процесс производства выстрела, подает их на электромеханический привод, приводящий в движение спусковой механизм, производится выстрел, причем блок управления изменяет частоту и скважность рабочих сигналов по данным, поступающим от датчика положения подвижной части электромеханического привода и/либо от датчика температуры электромеханического привода, необходимых для удержания подвижной части электромеханического привода в рабочем положении, в случае поступления управляющих сигналов однократного срабатывания, блок управления прекращает подачу рабочего сигнала на электромеханический привод после получения сигнала с датчика положения подвижной части привода. Изобретение направлено на улучшение эксплуатационных характеристик стрелкового оружия с электронной системой стрельбы, в том числе в сложных климатических условиях, а именно при воздействии высокой влажности и низкой температуры, пылевом воздействии. 2 н.п. ф-лы, 6 ил.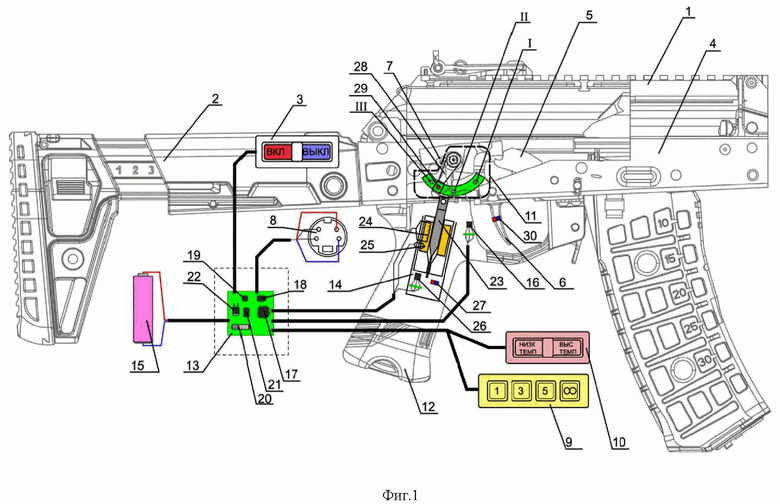
1. Стрелковое оружие с электронной системой стрельбы, содержащее ствольную коробку со спусковым механизмом, предохранительный механизм, электромеханический привод с подвижной частью, выполненный с возможностью срабатывания при производстве выстрела, причем спусковой механизм соединен с подвижной частью электромеханического привода, связанного с внешним источником сигналов через блок управления, который содержит процессор с блоком памяти, силовой ключ привода, датчик вибрации, и источник питания, соединенный со спусковым механизмом, отличающееся тем, что электромеханический привод дополнительно содержит датчик положения подвижной части и датчик температуры, данные из которых обрабатываются блоком управления.
2. Способ управления стрелковым оружием с электронной системой стрельбы, характеризующийся тем, что управляющие сигналы с внешнего источника поступают на блок управления, который формирует рабочие сигналы синхронно моментам возникновения вибраций, сопровождающих процесс производства выстрела, подает их на электромеханический привод, приводящий в движение спусковой механизм, производится выстрел, причем блок управления изменяет частоту и скважность рабочих сигналов по данным, поступающим от датчика положения подвижной части электромеханического привода и/либо от датчика температуры электромеханического привода, необходимых для удержания подвижной части электромеханического привода в рабочем положении, в случае поступления управляющих сигналов однократного срабатывания, блок управления прекращает подачу рабочего сигнала на электромеханический привод после получения сигнала с датчика положения подвижной части привода.
| US 11300378 B2, 12.04.2022 | |||
| US 11371792 B1, 28.06.2022 | |||
| МАТЕРИАЛ ДЛЯ ЗАЩИТЫ ОКРУЖАЮЩЕЙ СРЕДЫ ОТ СЕРОВОДОРОДА И ЕГО ПРОИЗВОДНЫХ, ВЫДЕЛЯЕМЫХ С ПОЛИГОНОВ ТВЕРДЫХ БЫТОВЫХ ОТХОДОВ | 2019 |
|
RU2701446C1 |

