Изобретение относится к области военной техники, а именно к автоматизированному вооружению, которое устанавливается на наземные роботехнические комплексы военного назначения (РТК ВН), и может быть использовано для повышения точности стрельбы.
Известен ряд технических решений, направленных на обеспечение процесса дистанционного наведения и стрельбы из стрелкового оружия.
Так, из уровня техники известны следующие технические решения:
Стрелковое оружие с дистанционным управлением [Патент РФ № 2460027, опубл. 27.08.2012 г.], содержащее устройство с тягой изменяемой длины, соединенной со штоком электромагнитного реле автомобильного стартера и рычагом, который упирается в спусковой крючок стрелкового оружия.
Устройство автоматического управления спаренным пулеметом [Патент РФ № 2642222, опубл. 24.01.2018 г.], содержащее станок с подвижной и неподвижными частями, установку с оружием, размещенную на подвижной части, закрепленный на неподвижной части привод горизонтального наведения, механизм вертикального наведения, кинематически связывающий привода с установкой. Установка разделена на первую и вторую части, соединенные соответственно через первую и вторую части механизма вертикального наведения с первым и вторым приводами этого механизма, каждая часть которого выполнена в виде двух червяков со скрещивающимися взаимно перпендикулярными осями и червячного колеса, жестко закрепленного на оси одного червяка, размещенного на подвижной части и взаимодействующего с зубчатым колесом, жестко связанным с разделенной частью установки, и сопряженного с другим червяком, ось которого совмещена с вертикальной осью поворота подвижной части, при этом стволы соответственно размещены на первой и второй частях установки.
Боевой модуль АУ-220М с артиллерийской установкой для размещения на военной технике (Патент RU 55117 U1, опубл. 27.07.2006), содержащий боевой модуль с артиллерийской установкой для размещения на подвижных боевых средствах, состоящий из бронированной башни с артиллерийским орудием, боеукладки, системы заряжания и прицельно-наблюдательного комплекса, 57 мм автоматической пушки, системы управления огнем, стабилизатора вооружения.
Дистанционно-управляемый боевой модуль (Патент RU 2715254 U1, опубл. 26.02.2020), содержащий механический модуль и размещенные в нем: пулемет крупного калибра, система питания, состоящая из расположенного внутри механического модуля съемного магазина с лентой, снаряженной патронами, и тракта питания пулемета.
Наиболее близким техническим решением к заявленному является способ ведения боевых действий, система дистанционного управления стрельбой и дистанционно-управляемое стрелковое оружие (Заявка на изобретение № 2004110354/02, опубл. 20.10.2005 г. Прототип). Система дистанционного управления стрелковым оружием, содержащая по меньшей мере одну единицу стрелкового оружия, установленную стационарно и содержащую видеокамеру, привода вертикального и горизонтального перемещения, привод спускового механизма и приемнопередающее устройство, соединенные каналом связи через управляющее приемнопередающее устройство с компьютером, имеющим монитор и устройство управления, например «джойстик». Стационарное стрелковое оружие оборудовано оптическим прицелом с лазерным целеуказателем.
Дистанционно-управляемое стрелковое оружие, содержащее ствол и механизмы горизонтального и вертикального перемещения, видеокамеру, блок управления, подключенный к приемнопередающему устройству, привода вертикального и горизонтального перемещения и привод спускового механизма, подключенные к блоку управления. Механизм вертикально перемещения ствола выполнен в виде вертикального сектора, взаимодействующего с приводом вертикального перемещения, а механизм горизонтального перемещения выполнен в виде поворотной планки, взаимодействующей с приводом горизонтального перемещения, спусковой механизм выполнен в виде соленоида или кулачкового механизма с электроприводом, при этом все привода соединены электрической связью с блоком управления.
Общим недостатком представленных выше технических решений, в том числе и прототипа, является их недостаточная эффективность, обусловленная низкой точностью стрельбы очередями из автоматического оружия вследствие увода оружия с линии прицеливания за счет отдачи.
Известно, что принцип работы автоматического оружия основан на использовании энергии пороховых газов. Поскольку штатный темп стрельбы из автоматического оружия достаточно высок и составляет, например, для пулемета «Корд» не менее 600 выстрелов в минуту, то стрельба очередями из указанного типа оружия, установленного на боевой модуль, с неизбежностью сопровождается уводом оружия с линии прицеливания за счет отдачи и неабсолютной жесткости всех элементов, фиксирующих оружие в пространстве, включая несущие элементы модуля, а также корпус и шасси робототехнического комплекса. При этом чем выше темп стрельбы и длиннее очередь, тем значительнее проявление данного эффекта.
Ко всему прочему, следует отметить ограниченность возимого запаса боеприпасов на борту робототехнического комплекса военного назначения (РТК ВН). Данное обстоятельство также обуславливает требования к обеспечению высокой точности стрельбы вследствие сложности пополнения возимого боезапаса РТК ВН, действующего на удалении в дистанционном или автоматическом режиме.
Актуальность предлагаемого технического решения возрастает в тех случаях, когда точность стрельбы превалирует над скорострельностью.
Указанная проблема может быть эффективно решена за счет использования в конструкции боевого модуля прерывателя очереди.
Задачей и техническим результатом, на достижение которого направлено заявляемое изобретение, является увеличение эффективности боевого модуля за счет улучшения точности стрельбы очередями из автоматического оружия.
Технический результат достигается тем, что в корпусе видеокамеры размещают устройство прерывания очереди, состоящее из корпуса с монтажными креплениями, внешней и внутренней рамы, шарнирно соединённой между собой и корпусом, шарнирно-закрепленного во внутренней раме датчика-прерывателя, выполненного в виде полого сферического герметичного корпуса, внутри которого располагают электрические контакты электрически, связанные с электронным блоком управления, и металлической сферы.
Полый сферический герметичный корпус заполнен диэлектрической жидкостью, плотность которой подбирается эмпирическим методом в зависимости от потребной чувствительности датчика-прерывателя.
Предложение поясняется фигурами.
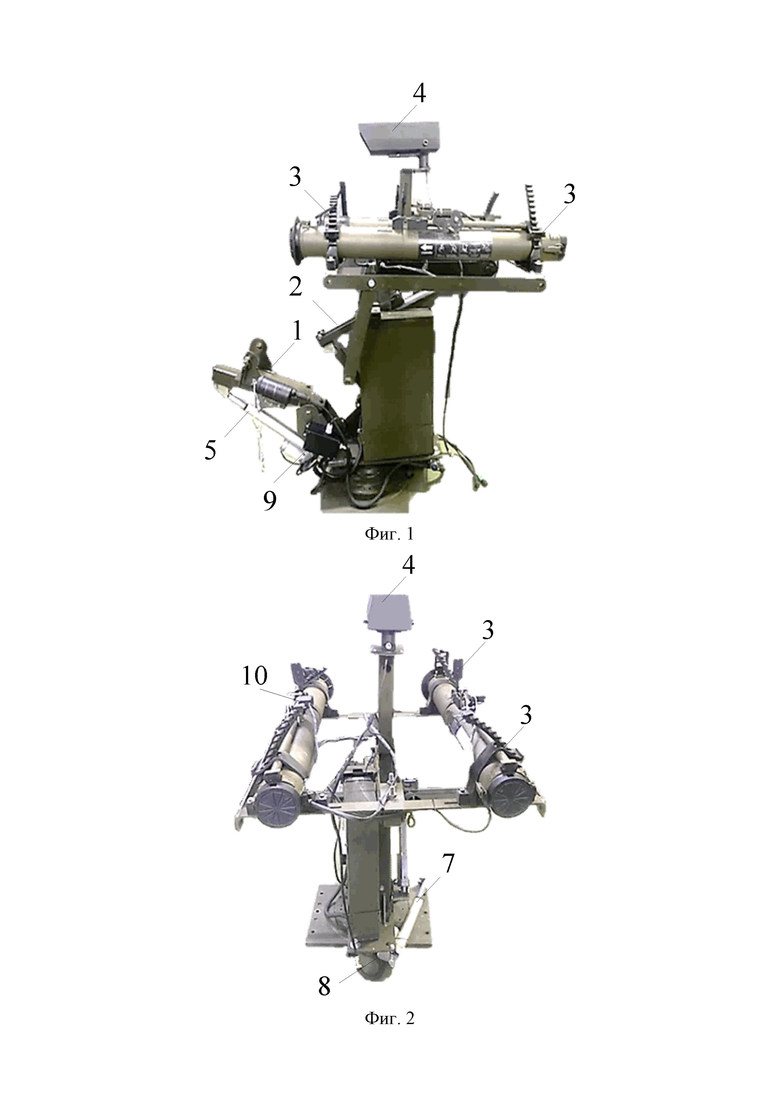
На фиг. 1 изображен боевой модуль (вид сбоку).
На фиг. 2 изображен боевой модуль (вид сзади).
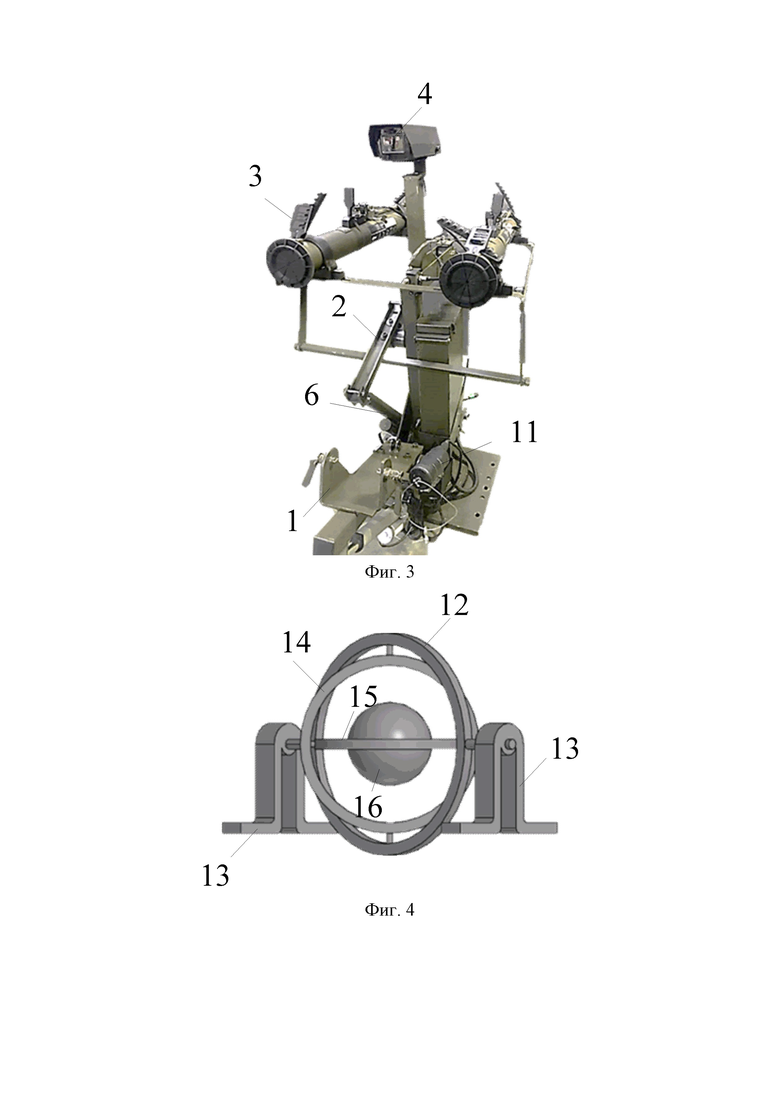
На фиг. 3 изображен боевой модуль (вид спереди).
На фиг. 4 изображено устройство прерывателя очереди (вид 1).
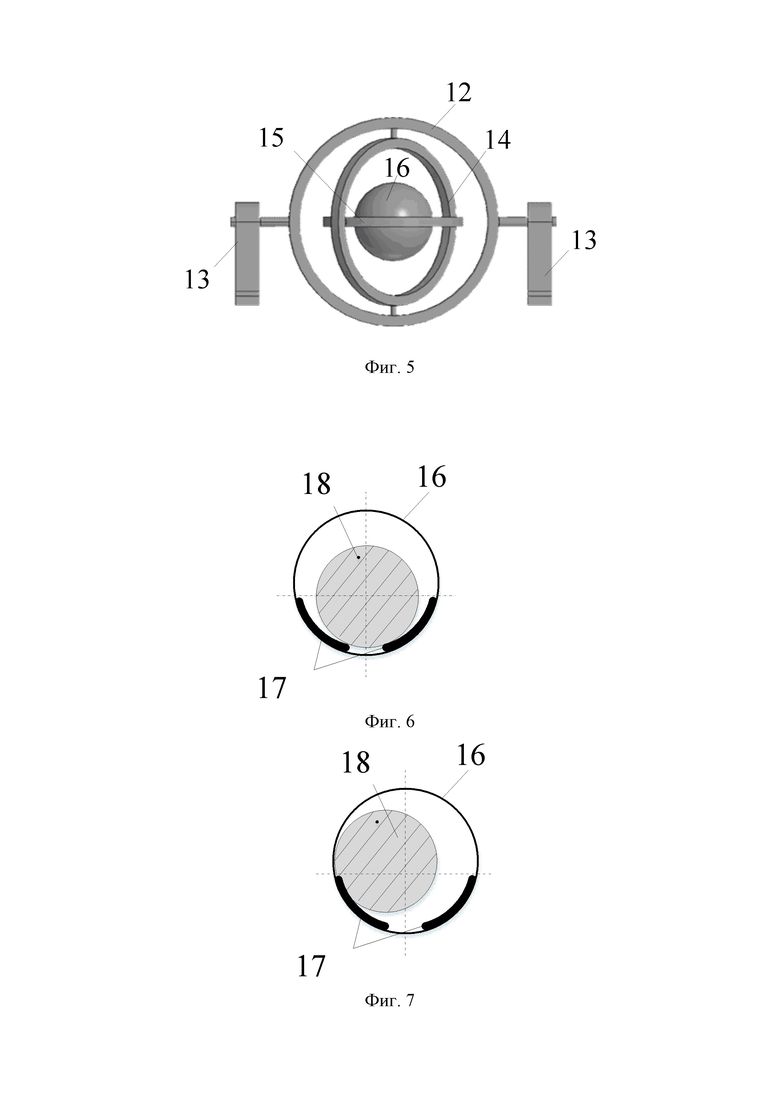
На фиг. 5 изображено устройство прерывателя очереди (вид 2).
На фиг. 6 изображено устройство датчика-прерывателя (вид в покое).
На фиг. 7 изображено устройство датчика-прерывателя (вид при воздействии инерционных сил).
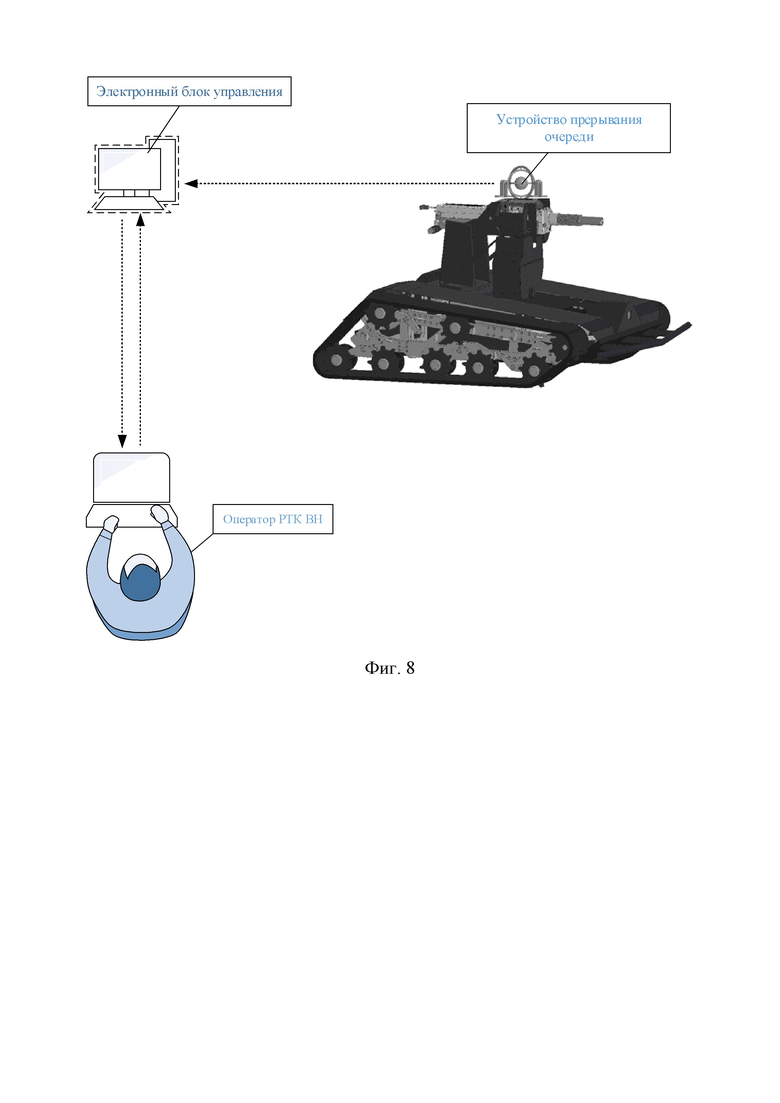
На фиг. 8 изображена схема функционирования боевого модуля робототехнического комплекса военного назначения с устройством прерывания очереди.
Заявленный боевой модуль робототехнического комплекса военного назначения с устройством прерывания очереди при стрельбе из автоматического оружия, содержит: пастель 1 гранатомёта АГС-17, пастель 2 пулемета ПКТ и универсальные крепления 3 для РПГ-7 (РПГ-18, РПО), видеокамеру 4, актуатор 5 линейного привода для позиционирования гранатомёта АГС-17 по вертикали (см. фиг. 1, 2), актуатор 6 линейного привода для позиционирования пулемёта ПКТ по вертикали (см. фиг. 3), актуатор 7 линейного привода для позиционирования турели по горизонтали (см. фиг. 2), энкодер 8 определения турели по горизонтали (см. фиг. 2), датчик 9 определения турели по вертикали (см. фиг. 1), механизм электроспуска 10 РПГ-7 (см. фиг. 2), электроспуск 11 гранатомёта АГС-17 (см. фиг. 3), электронный блок управления (на фиг. не показан), соединенный каналом связи через управляющее приемнопередающее устройство с компьютером, имеющим монитор и устройство управления, например «джойстик» (на фиг. не показан). В корпусе видеокамеры 4 размещают устройство прерывания очереди, состоящее из корпуса 12 с монтажными креплениями 13, внешней 14 и внутренней 15 рамы шарнирно соединенные между собой и корпусом 12, датчика-прерывателя выполненного в виде полого сферического герметичного корпуса 16 внутри которого располагают электрические контакты 17 электрически связанные с электронным блоком управления (см. фиг. 7), и металлическая сфера 18 (см. фиг. 6). Полый сферический герметичный корпус 16 заполнен диэлектрической жидкостью, плотность которой подбирается эмпирическим методом в зависимости от потребной чувствительности датчика-прерывателя.
Заявленный боевой модуль РТК ВН с устройством прерывания очереди при стрельбе из автоматического оружия функционирует следующим образом. Боевой модуль размещают на шасси робототехнического комплекса. В зависимости от задач, стоящих перед оператором робототехнического комплекса, боевой модуль укомплектовывается тем вооружением, которое позволит выполнить задачу с большей эффективностью. В пастели 1 фиксируют гранатомёт АГС-17, в пастели 2 жестко фиксируют пулемет ПКТ, в универсальных креплениях 3 фиксируется требуемый вид гранатомета (см. фиг. 1-3). Эффективное ведение огня из автоматического стрелкового оружия, установленного в боевом модуле, возможно при устранении проблемы увода ствола с линии прицеливания. Увод ствола обусловлен наличием отдачи и неабсолютной жесткости всех элементов, фиксирующих оружие в пространстве, включая несущие элементы модуля, а также корпус и шасси робототехнического комплекса. Упомянутая проблема решается за счет введения в конструкцию боевого модуля устройства прерывания очереди, размещенного на самой высокой точке турели, внутри корпуса камеры 4 и жестко болтовым соединением крепящегося монтажными креплениями 13 к нему. Устройство прерывания очереди выполнено в виде гироскопического прибора с тремя степенями свободы, обусловленные его конструкцией состоящей из корпуса 12, внешней 14 и внутренней 15 рамы, шарнирно соединенных между собой и корпусом 12 (см. фиг. 4, 5). Такая конструкция предотвращает срабатывание устройства при изменении углов крена и тангажа РТК ВН при его движении по пересеченной местности, то есть обеспечивает сохранение положения полого сферического герметичного корпуса 16 в пространстве неизменным независимо от положения корпуса РТК ВН.
При производстве выстрела (очереди выстрелов) из автоматического оружия энергия отдачи заставляет корпус оружия смещаться назад. Ускорение, возникающее при движении корпуса оружия, через пастель 1 и (или) 2, элементы крепления, включая несущие элементы модуля, корпус и шасси РТК ВН передается на герметичный корпус 16 датчика-прерывателя внутри которого свободно расположена металлическая сфера 18, на который действуют инерционные силы против направления движения корпуса 16, возникающие при резком его перемещении (см. фиг. 7). Выходя из состояния равновесия, сфера 18 смещаясь размыкает электрические контакты 17, при этом на электронный блок управления (см. фиг. 8) поступает сигнал о прекращении огня, в дальнейшем передающийся на механизмы электроспуска 10 и (или) 11 выключая их.
При возвращении всей системы, включающей корпус оружия, пастели 1 и (или) 2, элементы крепления, включая несущие элементы модуля, корпус и шасси РТК ВН, в уравновешенное состояние (состояние покоя), и возвращении ствола оружия на линию прицеливания сфера 18, находящаяся в покое, замыкает электрические контакты 17, при этом на электронный блок управления поступает сигнал о возобновлении огня, который передается на механизмы электроспуска 10 и (или) 11. Таким образом осуществляется прерывание очереди из автоматического оружия и ее возобновление при возвращении ствола оружия на линию прицеливания.
Следует отметить, что полый сферический герметичный корпус 16 заполнен диэлектрической жидкостью, плотность которой подбирается эмпирическим методом в зависимости от потребной чувствительности датчика-прерывателя. Используемая жидкость позволит снизить чувствительность датчика-прерывателя к незначительным вибрациям, связанным с работой силовой установки, движения РТК ВН и пр.
В зависимости от выполняемой боевой задачи, например, когда точность стрельбы превалирует над скорострельностью, устройство прерывания очереди активируется, в противном случае его дезактивируют. Прерывание очереди может осуществляться как в автоматическом режиме, так и в ручном, к примеру, по сигналу светового индикатора на устройстве управления «джойстике».
По сравнению с прототипом предлагаемое техническое решение позволяет повысить эффективность стрельбы очередями из автоматического оружия.
| название | год | авторы | номер документа |
|---|---|---|---|
| Боевой модуль робототехнического комплекса с универсальным ложементом | 2024 |
|
RU2838709C1 |
| СПОСОБ РЕШЕНИЯ ОГНЕВОЙ ЗАДАЧИ ДИСТАНЦИОННО УПРАВЛЯЕМЫМ НАЗЕМНЫМ РОБОТОТЕХНИЧЕСКИМ КОМПЛЕКСОМ ВОЕННОГО НАЗНАЧЕНИЯ В АВТОНОМНОМ РЕЖИМЕ | 2024 |
|
RU2840168C1 |
| 2_Многофункциональный наземный робототехнический комплекс | 2023 |
|
RU2829371C1 |
| НАЗЕМНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС С НОЖНИЧНЫМ ПОДЪЕМНИКОМ БОЕВОГО МОДУЛЯ | 2023 |
|
RU2830637C1 |
| Боевой модуль робототехнического комплекса с дистанционным наведением и ведением огня | 2024 |
|
RU2829896C1 |
| УСТРОЙСТВО АВТОМАТИЗАЦИИ НАВЕДЕНИЯ ПУСКОВОЙ УСТАНОВКИ ПРОТИВОТАНКОВОГО РАКЕТНОГО КОМПЛЕКСА "ФАГОТ" | 2024 |
|
RU2834077C1 |
| СПОСОБ ПОСТАНОВКИ МИННЫХ ЗАГРАЖДЕНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2023 |
|
RU2833085C1 |
| Способ и устройство для постановки минных заграждений | 2023 |
|
RU2834487C1 |
| Мобильный роботехнический комплекс | 2024 |
|
RU2828909C1 |
| Система управления огнем робототехнического комплекса | 2020 |
|
RU2749973C1 |
Изобретение относится к области военной техники. В корпусе видеокамеры размещают устройство прерывания очереди, состоящее из корпуса с монтажными креплениями, внешней и внутренней рамы, шарнирно соединённой между собой и корпусом, датчика-прерывателя, выполненного в виде полого сферического герметичного корпуса, внутри которого располагают электрические контакты, электрически связанные с электронным блоком управления, и металлической сферы. Полый сферический герметичный корпус заполнен диэлектрической жидкостью, плотность которой подбирается эмпирическим методом в зависимости от потребной чувствительности датчика-прерывателя. Достигается увеличение эффективности боевого модуля за счет улучшения точности стрельбы очередями из автоматического оружия. 1 з.п. ф-лы, 8 ил.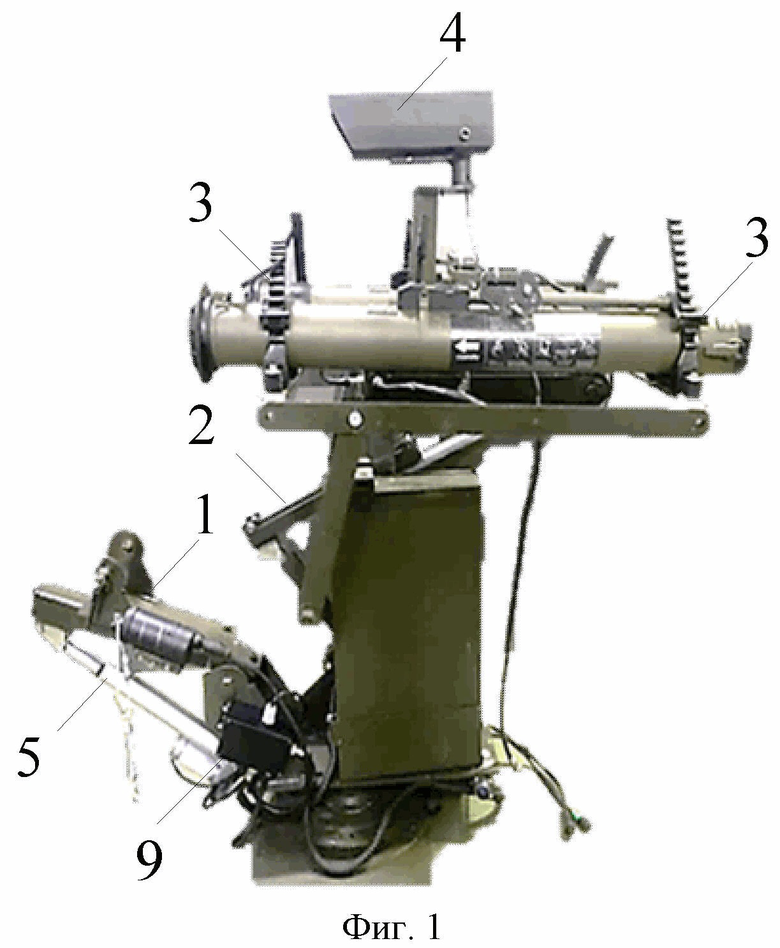
1. Боевой модуль робототехнического комплекса военного назначения с устройством прерывания очереди при стрельбе из автоматического оружия, содержащий: пастели гранатомета АГС-17 и пулемета ПКТ, универсальные крепления для РПГ-7 (РПГ-18, РПО), видеокамеру, актуатор линейного привода для позиционирования гранатомета АГС-17 по вертикали, актуатор линейного привода для позиционирования пулемета ПКТ по вертикали, актуатор линейного привода для позиционирования турели по горизонтали, энкодер определения турели по горизонтали, датчик определения турели по вертикали, механизмы электроспуска РПГ-7 и гранатомета АГС-17, электронный блок управления, соединенный каналом связи через управляющее приемнопередающее устройство с компьютером, имеющим монитор и устройство управления, отличающийся тем, что в корпусе видеокамеры размещают устройство прерывания очереди, состоящее из корпуса с монтажными креплениями, внешней и внутренней рамы, шарнирно соединенной между собой и корпусом, датчика-прерывателя, выполненного в виде полого сферического герметичного корпуса, внутри которого располагают электрические контакты, электрически связанные с электронным блоком управления, и металлической сферы.
2. Боевой модуль робототехнического комплекса военного назначения с устройством прерывания очереди при стрельбе из автоматического оружия, охарактеризованный по п.1, отличающийся тем, что полый сферический герметичный корпус заполнен диэлектрической жидкостью, плотность которой подбирается эмпирическим методом в зависимости от потребной чувствительности датчика-прерывателя.
| КОНСТРУКЦИЯ И СПОСОБ ДЛЯ БАЛАНСИРОВКИ ОРУДИЙНОГО СТВОЛА СИСТЕМЫ ВООРУЖЕНИЯ, УСТАНОВЛЕННОЙ НА ТРАНСПОРТНОМ СРЕДСТВЕ, А ТАКЖЕ ТРАНСПОРТНОЕ СРЕДСТВО, СОДЕРЖАЩЕЕ ТАКУЮ КОНСТРУКЦИЮ | 2020 |
|
RU2816373C2 |
| КОМПЛЕКС ВООРУЖЕНИЯ БОЕВОЙ МАШИНЫ И СТАБИЛИЗАТОР ВООРУЖЕНИЯ | 2007 |
|
RU2360208C2 |
| БОЕВОЙ МОДУЛЬ РОБОТОТЕХНИЧЕСКОГО КОМПЛЕКСА С ДИСТАНЦИОННЫМ НАВЕДЕНИЕМ И ВЕДЕНИЕМ ОГНЯ | 2023 |
|
RU2813397C1 |
| CN 200989749 Y, 12.12.2007 | |||
| KR 1020120106306 A, 26.09.2012 | |||
| KR 101452595 B1, 22.10.2014 | |||
| KR 1020100096411 A, 02.09.2010. | |||

