Изобретение относится к сейсмологии, а точнее к аппаратуре для сейсмических исследований, и может быть использовано при создании систем регистрации сейсмических данных.
Известен формирователь сигналов астрономического времени для автономных цифровых сейсмометров, содержащий приемник GPS, блок согласования логических уровней, вход которого соединен с выходом идентификации секундных меток приемника GPS [1].
Недостатком известного устройства является то, что оно обеспечивает точную привязку регистрируемого сейсмического сигнала к астрономическому времени только при условии устойчивой связи приемника GPS к спутникам этой системы. Это условие выполняется не всегда, например, при плотной облачности. Потеря синхронизации может длиться сутками, что совершенно недопустимо, особенно во время продолжительных сейсмических мониторингов.
Известен также формирователь сигналов астрономического времени для автономных цифровых сейсмометров, содержащий приемник GPS, блок согласования логических уровней, вход которого соединен с выходом идентификации секундных меток приемника GPS [2].
Данный формирователь также имеет низкую надежность по тем же причинам, что и [1].
Наиболее близким техническим решением к предлагаемому и принятым за прототип является формирователь сигналов астрономического времени для автономных цифровых сейсмометров, содержащий приемник GPS, блок согласования логических уровней, вход которого соединен с выходом идентификации секундных меток приемника GPS, тактовый генератор, контроллер поддержания идентификации секундных меток, тактовый вход которого соединен с выходом тактового генератора, вход идентификации секундных меток контроллера поддержания идентификации секундных меток соединен с выходом блока согласования логических уровней, выход контроллера поддержания идентификации секундных меток является выходом идентификации секундных меток формирователя, а первый вход прерывания контроллера поддержания идентификации секундных меток соединен с выходом секундных меток формирователя, причем, контроллер поддержания идентификации секундных меток имеет программу, заключенную в нем, обеспечивающую прием сообщений о времени текущей секундной метки при наличии секундных меток от приемника GPS, расчет времени секундной метки при прекращении секундных меток от приемника GPS и выдачу идентификационной информации о текущей секундной метке на выходе этого контроллера в формате протокольного сообщения приемника GPS [3].
К недостаткам известного технического решения можно отнести недостаточную надежность, т.к. такой формирователь сигналов астрономического времени для автономных цифровых сейсмометров при потере связи со спутниками GPS начинает выдавать синхроимпульсы секундных меток, вырабатываемые по высокостабильному тактовому генератору, предварительно синхронизированному с секундными метками, вырабатываемыми приемником GPS. Но насколько бы генератор не был стабильным, он все равно имеет погрешность. В результате этого через некоторое время после перехода работы формирователя на синхронизацию от генератора, выдаваемые им синхроимпульсы секундных меток станут отличаться от реальных астрономических секунд. Как правило, потеря приемником GPS связи со спутниками и, следовательно, прекращение выработки им импульсов секундных меток и достоверной идентификационной информации о их времени является временной, но известный формирователь не имеет средств для повторной привязки, вырабатываемых им сигналов к сигналам приемника GPS при возобновлении его связи со спутниками.
Целью изобретения является повышение надежности формирователя сигналов астрономического времени для автономных цифровых сейсмометров.
Поставленная цель достигается тем, что формирователь сигналов астрономического времени для автономных цифровых сейсмометров содержит Т-триггер, D-триггер, элемент И, элемент ИЛИ, двоичный счетчик, шину постоянного потенциала уровня логического «0», шину постоянного потенциала уровня логической «1», два цифровых компаратора, причем двоичный счетчик и первый цифровой компаратор имеют количество разрядов не менее n1=⎡log2k1⎤, где
k1- ближайшее целое до числа fг. ⋅TPPS, где
fг. - частота тактового генератора,
TPPS=1с - период импульсов секундных меток,
а второй цифровой компаратор имеет количество разрядов не менее n2=⎡log2 k2 ⎤, где
k2- ближайшее целое до числа fг.⋅ tдл., где
tдл. - длительность импульса секундной метки,
входы сравнения первой группы первого цифрового компаратора соединены с соответствующими шинами постоянного потенциала уровней логического «0» и логической «1» таким образом, что на входы сравнения первой группы первого цифрового компаратора поступает двоичный код числа k1, входы сравнения второй группы первого цифрового компаратора соединены с выходами соответствующих разрядов двоичного счетчика, счетный вход суммирования которого соединен с выходом тактового генератора и тактовым входом Т-триггера, выход которого соединен с тактовым входом D-триггера и первым входом элемента ИЛИ, второй вход которого соединен с выходом D-триггера, а выход элемента ИЛИ соединен с первым входом элемента И, второй вход которого соединен с выходом «не равно» первого цифрового компаратора, выход элемента И соединен с входом сброса двоичного счетчика, вход сброса Т-триггера соединен с его Т-входом, входом установки и D-входом D-триггера и с шиной постоянного потенциала уровня логической «1»,вход установки Т-триггера соединен с входом сброса D-триггера, вторым входом прерывания контроллера поддержания идентификации секундных меток и с выходом секундных меток приемника GPS, входы сравнения первой группы второго цифрового компаратора соединены с соответствующими шинами постоянного потенциала уровней логического «0» и логической «1» таким образом, что на входы сравнения первой группы второго цифрового компаратора поступает двоичный код числа k2, входы сравнения второй группы второго цифрового компаратора соединены с выходами соответствующих разрядов двоичного счетчика, а выход «меньше» второго цифрового компаратора является выходом секундных меток формирователя.
Совокупность существенных признаков данного технического решения: «Т- триггер, D-триггер, элемент И, элемент ИЛИ, двоичный счетчик, шина постоянного потенциала уровня логического «0», шина постоянного потенциала уровня логической «1», два цифровых компаратора, причем двоичный счетчик и первый цифровой компаратор имеют количество разрядов не менее n1=⎡log2k1⎤, где
k1- ближайшее целое до числа fг. ⋅TPPS, где
fг. - частота тактового генератора,
TPPS=1с - период импульсов секундных меток,
а второй цифровой компаратор имеет количество разрядов не менее n2=⎡log2 k2 ⎤, где
k2- ближайшее целое до числа fг.⋅ tдл., где
tдл. - длительность импульса секундной метки,
входы сравнения первой группы первого цифрового компаратора соединены с соответствующими шинами постоянного потенциала уровней логического «0» и логической «1» таким образом, что на входы сравнения первой группы первого цифрового компаратора поступает двоичный код числа k1, входы сравнения второй группы первого цифрового компаратора соединены с выходами соответствующих разрядов двоичного счетчика, счетный вход суммирования которого соединен с выходом тактового генератора и тактовым входом Т-триггера, выход которого соединен с тактовым входом D-триггера и первым входом элемента ИЛИ, второй вход которого соединен с выходом D-триггера, а выход элемента ИЛИ соединен с первым входом элемента И, второй вход которого соединен с выходом «не равно» первого цифрового компаратора, выход элемента И соединен с входом сброса двоичного счетчика, вход сброса Т-триггера соединен с его Т-входом, входом установки и D-входом D-триггера и с шиной постоянного потенциала уровня логической «1»,вход установки Т-триггера соединен с входом сброса D-триггера, вторым входом прерывания контроллера поддержания идентификации секундных меток и с выходом секундных меток приемника GPS, входы сравнения первой группы второго цифрового компаратора соединены с соответствующими шинами постоянного потенциала уровней логического «0» и логической «1» таким образом, что на входы сравнения первой группы второго цифрового компаратора поступает двоичный код числа k2, входы сравнения второй группы второго цифрового компаратора соединены с выходами соответствующих разрядов двоичного счетчика, а выход «меньше» второго цифрового компаратора является выходом секундных меток формирователя» - обеспечивает возможность повторной автоматической привязки сигналов астрономического времени, вырабатываемых формирователем, к сигналам времени приемника GPS при восстановлении связи приемника GPS со спутниками после ее временной потери, что повышает надежность работы формирователя.
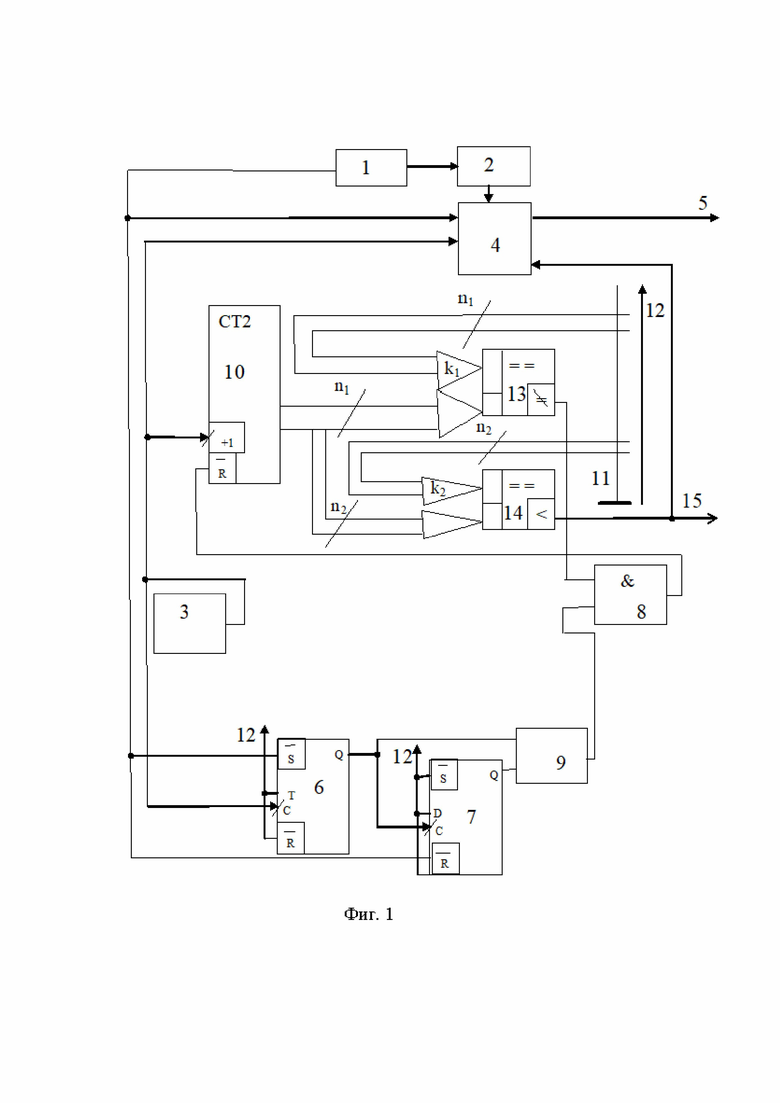
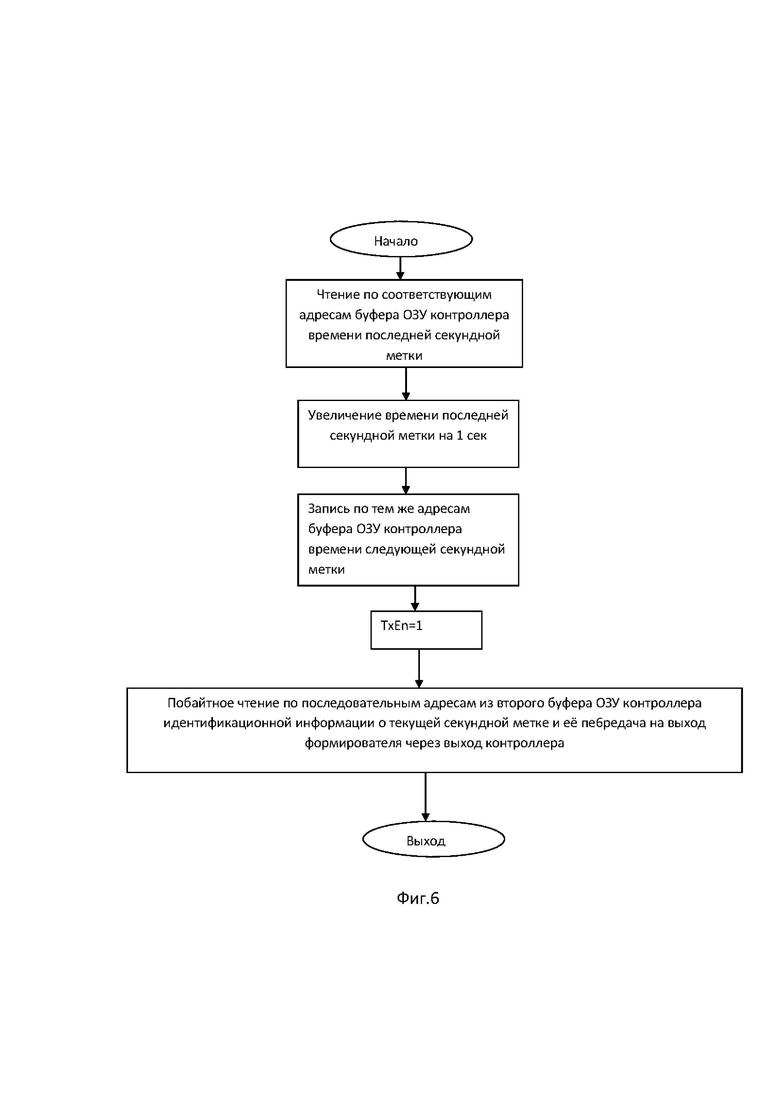
На фиг. 1 представлена блок-схема формирователя сигналов астрономического времени для автономных цифровых сейсмометров, на фиг. 2 - временная диаграмма работы формирователя сразу после включения питания, на фиг.3 - временная диаграмма работы формирователя после установления приемником GPS связи со спутниками как после включения питания, так и после потери связи, на фиг.4 - пример алгоритма работы основной программы контроллера поддержания идентификации секундных мерок, на фиг.5 - пример алгоритма работы подпрограммы обработки прерываний по второму входу прерывания контроллера поддержания идентификации секундных меток, на фиг.6 - пример алгоритма работы подпрограммы обработки прерываний по первому входу прерывания контроллера поддержания идентификации секундных меток.
Формирователь сигналов астрономического времени для автономных цифровых сейсмометров (фиг. 1) содержит приемник GPS 1, блок 2 согласования логических уровней, тактовый генератор 3, контроллер 4 поддержания идентификации секундных меток, выход 5 идентификации секундных меток Т- триггер 6, D-триггер 7, элемент И 8, элемент ИЛИ 9, двоичный счетчик 10, шину 11 постоянного потенциала уровня логического «0», шину 12 постоянного потенциала уровня логической «1», первый цифровой компаратор 13, второй цифровой компаратор 14, причем контроллер 4 имеет программу, заключенную в нем, обеспечивающую прием сообщений приемника GPS 1 о времени текущей секундной метки при наличии секундных меток от приемника GPS 1, расчет времени секундной метки при прекращении поступления секундных меток от приемника GPS 1 и выдачу идентификационной информации о текущей секундной метке на выходе этого контроллера 4 в формате протокольного сообщения приемника GPS 1, а двоичный счетчик 10 и первый цифровой компаратор 13 имеют количество разрядов не менее n1=⎡log2k1⎤, где
k1- ближайшее целое до числа fг. ⋅TPPS, где
fг. - частота тактового генератора 3,
TPPS=1с - период импульсов секундных меток,
а второй цифровой компаратор 14 имеет количество разрядов не менее n2=⎡log2 k2 ⎤, где
k2- ближайшее целое до числа fг.⋅ tдл., где
tдл. - длительность импульса секундной метки, входы сравнения первой группы первого цифрового компаратора 13 соединены с соответствующими шинами 11, 12 постоянного потенциала логического «0» и логической «1» таким образом, что на входы сравнения первой группы первого цифрового компаратора 13 поступает двоичный код числа k1, входы сравнения второй группы первого цифрового компаратора 13 соединены с выходами соответствующих разрядов двоичного счетчика 10, счетный вход суммирования которого соединен с выходом тактового генератора 3,тактовым входом контроллера 4 и с тактовым входом Т-триггера 6, выход которого соединен с тактовым входом D-триггера 7 и первым входом элемента ИЛИ 9, второй вход которого соединен с выходом D-триггера 7, а выход элемента ИЛИ 9 соединен с первым входом элемента И 8, второй вход которого соединен с выходом «не равно» первого цифрового компаратора13, выход элемента И 8 соединен с входом сброса двоичного счетчика 10, вход сброса Т-триггера 6 соединен с его Т-входом, входом установки и D-входом D-триггера 7 и с шиной 12 постоянного потенциала уровня логической «1»,вход установки Т-триггера 6 соединен с входом сброса D-триггера 7, вторым входом прерывания контроллера 4 и с выходом секундных меток приемника GPS 1, входы сравнения первой группы второго цифрового компаратора 14 соединены с соответствующими шинами11, 12 постоянного потенциала уровней логического «0» и логической «1» таким образом, что на входы сравнения первой группы второго цифрового компаратора 14 поступает двоичный код числа k2, входы сравнения второй группы второго цифрового компаратора 14 соединены с выходами соответствующих разрядов двоичного счетчика 10, а выход «меньше» второго цифрового компаратора 14 является выходом 15 секундных меток формирователя и соединен с первым входом прерывания контроллера 4 поддержания идентификации секундных меток.
Формирователь работает следующим образом.
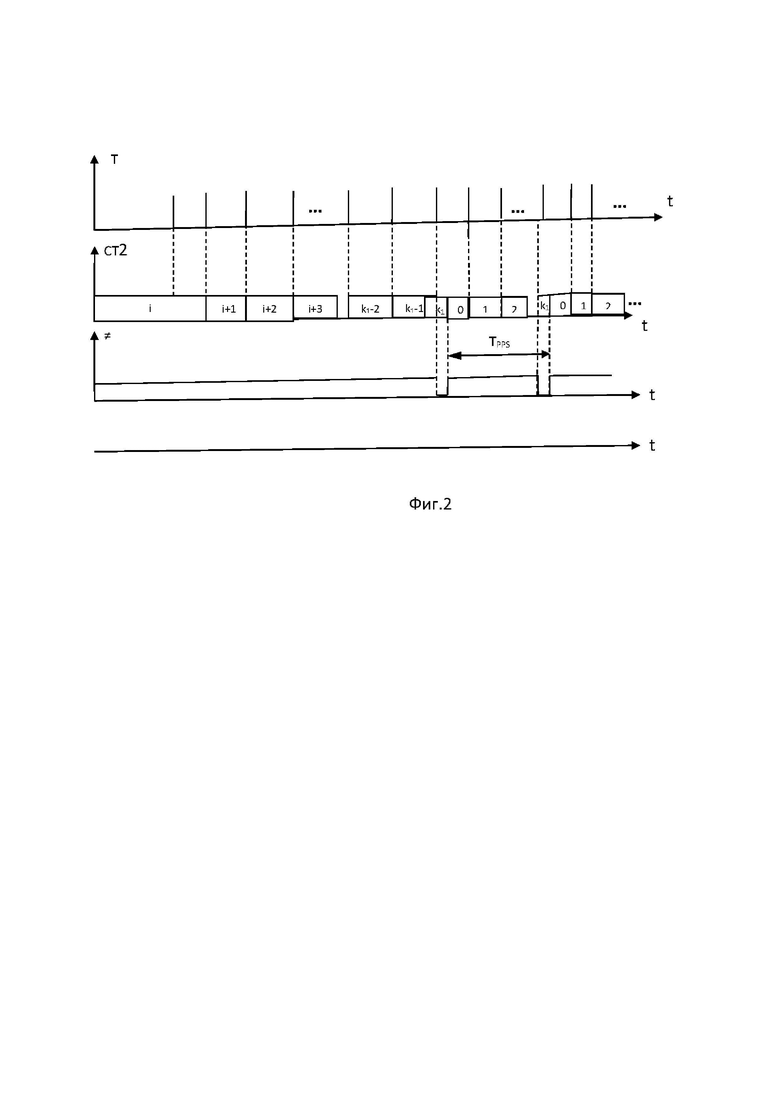
После включения питания у приемника GPS 1 некоторое время уходит на то, чтобы установить связь со спутниками. В течение этого времени на выходе секундных меток приемника GPS 1 секундные метки отсутствуют, т.е. на нем удерживается логический 0»,который с этого выхода приемника GPS 1 поступает на вход установки Т-триггера 6 и вход сброса D-триггера 7, в результате чего на выходе Т-триггера 6 устанавливается «1», а на выходе D-триггера 7 - «0» независимо от перепадов напряжений на тактовых входах этих триггеров 6, 7.С выходов указанных триггеров 6,7 соответствующие логические уровни попадают на входы элемента ИЛИ 9, на выходе которого установится «1» и поступит на первый вход элемента И8. В этом случае состояние выхода элемента И 8 будет полностью определяться только состоянием его второго входа, на который поступает сигнал с выхода «не равно» первого цифрового компаратора 13. Формирование этого сигнала сразу после включения питания формирователя поясняется временной диаграммой на фиг. 2.
На этой временной диаграмме:
Т- нарастающие фронты тактовых импульсов тактового генератора 3,
СТ2 - состояние двоичного счетчика 10 (число в двоичном коде на его выходах),
≠ - сигнал на выходе «не равно» первого цифрового компаратора13. Сразу после включения питания формирователя состояние (двоичное число) на выходах двоичного счетчика 10 может быть произвольным.
Возможны два взаимоисключающих состояния, в которых может оказаться двоичный счетчик 10 после включения питания:
1. Состояние двоичного счетчика 10 стало равно некоторому двоичному числу i≠к1. В таком случае на входы сравнения первой и второй групп первого цифрового компаратора 13 поступят разные числа, поэтому на его выходе «не равно» возникнет логическая «1», которая через элемент И 8 пройдет на вход сброса двоичного счетчика 10, запретив тем самым его сброс и разрешая тем самым режим счета. В этом режиме двоичный счетчик 10 по каждому нарастающему фронту тактового сигнала, получаемого с выхода тактового генератора 3, будет увеличивать число на своих выходах на 1 до тех пор, пока счет не дойдет до к1. Как только это произойдет, на обоих группах входов сравнения первого цифрового компаратора 13 окажутся равные числа, поэтому на его выходе «не равно» возникнет логический «0», который через элемент И 8 пройдет на вход сброса двоичного счетчика 10, в результате чего счетчик 10 асинхронно сбросится, т. е. на его выходах сразу же установится число 0. Т.к. 0≠к1 , то выход «не равно» первого цифрового компаратора 13 , а, следовательно, и вход сброса двоичного счетчика 10 перейдут в состояние «1», двоичный счетчик 10 снова начнет счет тактовых импульсов от 0 до к1, что займет у него время TPPS=1c, т. к число к1 было выбрано именно из этих соображений. Далее эти циклы по 1с будут повторяться до тех пор, пока приемник GPS 1 не установит связь и начнет выдавать на своем выходе импульсы секундных меток.
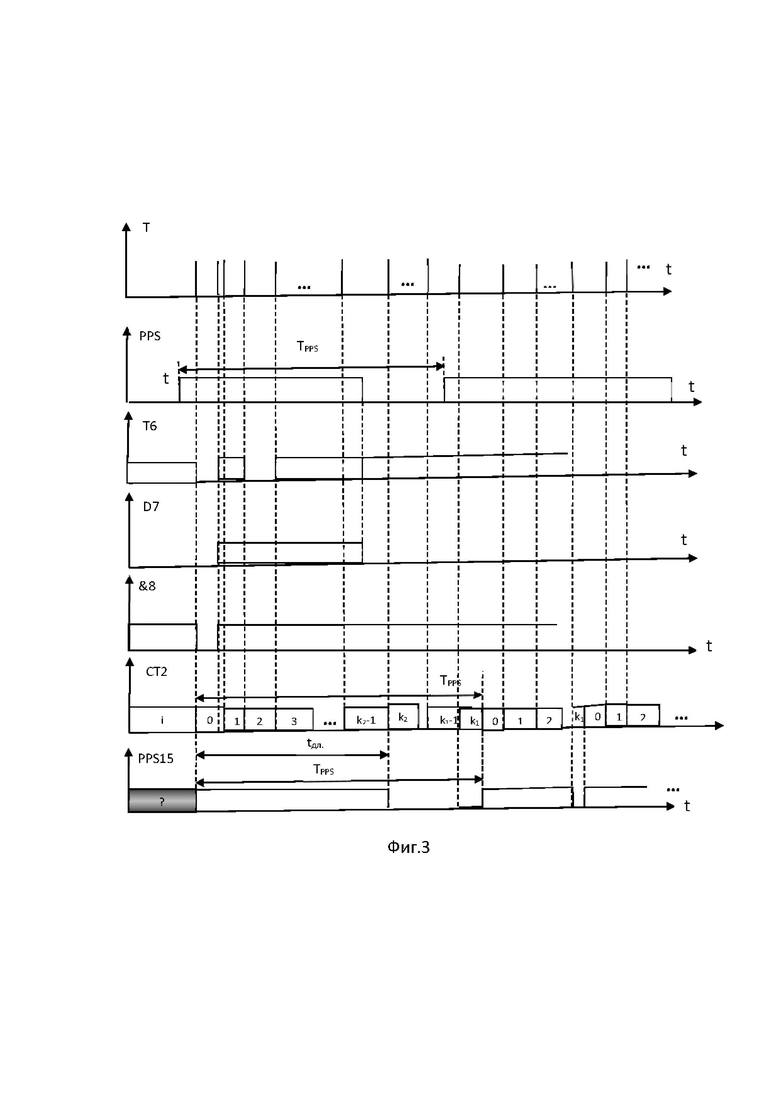
2. Счетчик 10 самопроизвольно сразу после включения питания пришел в состояние к1, что маловероятно, но возможно. В таком случае на выходе «не равно» первого компаратора 13 сразу возникнет логический «0», который через элемент И 8 пройдет на вход сброса двоичного счетчика 10, сбросит его, и далее все пойдет по той же схеме, что и в первом случае, также двоичный счетчик будет формировать циклы по 1с до появления импульсов секундных меток на выходе секундных меток приемника GPS 1, что поясняется временными диаграммами фиг.3, на которой используются следующие обозначения для сигналов, отсутствующих на фиг.2:
PPS - сигнал с выхода секундных меток приемника GPS 1 ,
Т6 - сигнал на выходе Т-триггера 6,
D7 - сигнал на выходе D-триггера 7,
PPS15 - сигналы секундных меток, вырабатываемые формирователем на выходе 15 секундных меток.
&8 - сигнал на выходе элемента И 8 и, что то же самое, на входе сброса двоичного счетчика 10.
Как уже было описано выше, пока приемник GPS 1 не установил связь со спутниками, Т- триггер 6 и элемент ИЛИ 9 будут находится в состоянии «1»,D-триггер - в состоянии «0», а состояние элемента И 8 будет полностью определяться состоянием его второго входа, т. е. состоянием на выходе «не равно» первого цифрового компаратора 13.
После того, как приемник GPS 1 установит связь со спутниками, он каждую секунду вырабатывает импульс секундной метки, нарастающий фронт которого совпадает с началом секунды астрономического времени. Допустим, первый нарастающий фронт импульса секундной метки появился в некий момент времени t0. (фиг.3) Уровень логической «1», установившийся после этого фронта снимет Т-триггер 6 с установки, а D-триггер 7 - со сброса, но, пока не будет каких-либо причин для изменения их состояний, на выходе Т-триггера 6 будет оставаться логическая «1», а на выходе D-триггера 7 - «0». Первым же тактовым импульсом с выхода тактового генератора 3, поступившем после фронта импульса секундной метки Т-триггер 6 изменит свое состояние на противоположное, т.е. переключится из «1» в «0», в результате чего на обоих входах элемента ИЛИ 9 окажутся логические «0». Значит и на его выходе тоже установится «0», который пройдет на первый вход элемента И 8. В таком случае этот «0» пройдет и на выход элемента И 8 независимо от состояния его второго входа. «0» с выхода элемента И 8 поступает на вход сброса двоичного счетчика 10, произведя сброс последнего и переведя выход «не равно» первого цифрового компаратора 13 в состояние «1». Следующим тактовым импульсом с выхода генератора 3 Т-триггер 6 снова перебросится в противоположное состояние, т. к. на его Т-входе установлена логическая «1», т. е. его выход переключится из «0» в «1», сформировав тем самым нарастающий перепад на тактовом входе D-триггера 7, который переключится в «1», переведя в «1» оба входа, а, следовательно, и выход элемента ИЛИ 9, и первый вход элемента И 8, на втором входе которого уже стоит «1» с выхода «не равно» первого цифрового компаратора 13, поэтому сигнал с уровнем логического «0» на первом входе элемента И 8, а, значит и на входе сброса двоичного счетчика 10 закончится, продержавшись ровно один такт частоты с выхода тактового генератора 3 и сбросив в состояние 0 двоичный счетчик 10.Т. к. сигнал сброса двоичного счетчика 10 закончился, то он после этого снова начинает отсчитывать тактовые импульсы, начиная с 0.
Одновременно с обнулением двоичного счетчика 10 на выходе «меньше» второго цифрового компаратора 14 возникнет уровень логической «1», т. к. заведомо 0<k2. Этот уровень будет там держаться до тех пор, пока в двоичном счетчике 10 не будет число, большее или равное k2, т.е. пока счетчик не досчитает до k2. После этого выход «меньше» второго цифрового компаратора 14(выход 15 секундных меток формирователя сбросится в «0»). Это произойдет через время, примерно равное tдл. времени длительности импульса секундной метки на выходе секундных меток приемника GPS 1. Точное совпадение времен длительностей секундных меток, получаемых с приемника GPS 1 и с выхода 15 секундных меток формирователя сигналов астрономического времени для автономных цифровых сейсмометров не обязательно, т. к. синхронизация сейсмометров производится только по нарастающим фронтам импульсов секундных меток, которые обязаны с известной точностью совпадать с началами астрономических секунд, а длительности сигналов секундных меток нужны для того, чтобы за их время могла быть передана последовательность байт, содержащая идентификационную информацию о сопровождаемой секундной метке. Обычно tдл=280÷300мс.
Сигнал на выходе «меньше» второго цифрового компаратора 14, фактически являясь сигналом на выходе 15 секундной метки формирователя , сам в процессе формирования последнего не участвует, следовательно, его переход в «0» при достижении двоичным счетчиком 10 значения k2 на работу других блоков устройства никак не повлияет. Однако примерно в этот же момент времени закончится импульс секундной метки на выходе секундных меток приемника GPS 1, т. е. на нем установится логический «0», который установит Т-триггер 6, и на выходе элемента ИЛИ 9 и первом входе элемента И 8 появится «1» на втором входе которого тоже будет удерживаться «1», т. к. переход сигнала секундной метки на выходе секундных меток приемника GPS 1 в «0» происходит, когда состояние двоичного счетчика 10 примерно равно k2<< k1, поэтому на выходе элемента И 8 и на входе сброса двоичного счетчика 10 будет «1», которая не производит сброса этого счетчика 10 и позволяет ему считать дальше, пока он не дойдет до k1, после чего двоичный счетчик 10 сбросится. Т . к. тактовый генератор 3, используемый в данном устройстве должен быть высокостабильным, то за 1с его частота сильно не отклонится от номинального значения, поэтому сброс двоичного счетчика 10 произойдет практически одновременно с появлением нарастающего фронта следующего импульса секундной метки на выходе секундных меток приемника GPS 1. Здесь возможны два случая:
1. Первым появился нарастающий фронт на выходе секундных меток приемника GPS 1. В таком случае не позже, чем через 1 такт частоты генератора 3 по сценарию, описанному выше, произойдет сброс двоичного счетчика 10, а на выходе15 секундных меток формирователя появится нарастающий фронт сигнала, а двоичный счетчик снова начнет считать от 0. Таким образом, приемник GPS1 своим сигналом осуществит перепривязку нарастающего фронта сигнала секундной метки на выходе 15 секундных меток формирователя к началу астрономической секунды.
2. Сначала двоичный счетчик 10 досчитает до k1, сбросится и снова начнет считать с 0, а через несколько тактов появится нарастающий фронт на выходе секундных меток приемника GPS 1, и так же, как и в первом случае, приемник GPS1 своим сигналом осуществит перепривязку нарастающего фронта сигнала секундной метки на выходе 15 секундных меток формирователя к началу астрономической секунды.
Допустим, приемник GPS 1 потерял связь со спутниками. В этом случае сигналы секундных меток на его выходе секундных меток прекратятся, т. е, на нем установится логический «0», т.е. возникнет такая же ситуация, как и сразу после включения напряжения питания (фиг.2). Двоичный счетчик 10 также будет отсчитывать циклы по TPPS=1c. Только в отличие от случая на фиг.2, где сброс двоичного счетчика 10 происходит в несвязанные с астрономическим временем моменты, сбросы двоичного счетчика 10 в циклах после потери приемником GPS 1 связи со спутниками в пределах погрешностей тактового генератора 3 будут совпадать с началами астрономических секунд, т.к., пока связь приемника GPS 1 со спутниками была моменты сброса двоичного счетчика 10 синхронизировались с нарастающими фронтами импульсов секундных меток на выходе секундных меток приемника GPS 1 с точностью менее одного такта тактового генератора 3, как было показано выше. При частоте тактового генератора 3 fг.=10МГц время одного такта составит 0,1мкс, а погрешность соответствия началу астрономической секунде нарастающего фронта сигнала секундной метки приемника GPS 1 не менее 1мкс [4]. Соответственно и нарастающий фронт сигнала на выходе 15 секундных меток формирователя, возникающий в момент сброса двоичного счетчика10 будет совпадать с началом астрономической секунды практически с погрешностью приемника GPS.
Таким образом, предлагаемое техническое решение в режиме работы после потери приемником GPS 1 связи со спутниками ведет себя так же, как и известный формирователь сигналов астрономического времени для автономных цифровых сейсмометров [3]. Однако, если приемнику GPS 1 удалось восстановить связь со спутниками, то известный формирователь не сможет скорректировать погрешность, накопленную за время отсутствия связи, т. к. он не имеет для этого технических средств. В то же время предлагаемый формирователь при возобновлении связи приемника GPS со спутниками осуществит синхронизацию нарастающих фронтов секундных меток на своем выходе 15 секундных меток с нарастающими фронтами секундных меток на выходе секундных меток приемника GPS (фиг.3) аналогично случаю после включения питания устройства, как было описано выше.
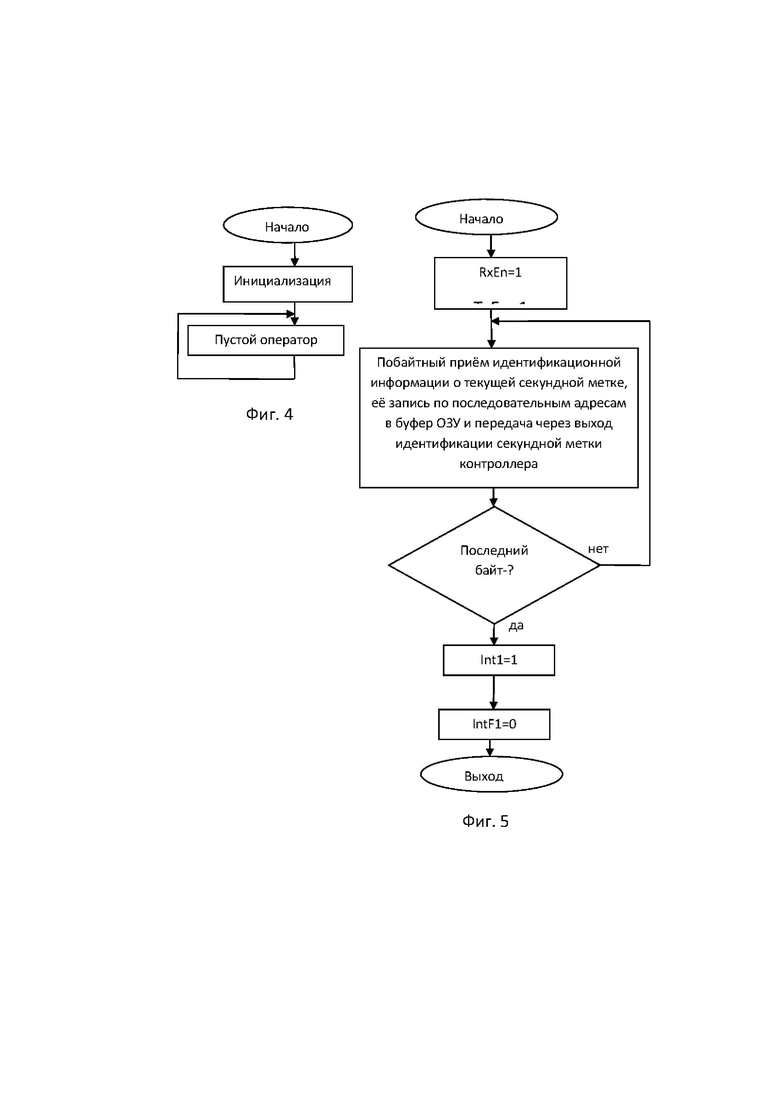
При потере приемником GPS 1 связи со спутниками необходимо поддерживать не только параметры секундных меток, но и их идентификационную информацию. Также надо восстанавливать ее правильность после восстановления связи приемника GPS 1 со спутниками, т. к., пока связь отсутствует приемник GPS 1 выдает на своем выходе идентификации секундных меток недостоверную информацию. За поддержание достоверности идентификационной информации секундных меток при потере и при восстановлении связи приемником GPS со спутниками отвечает контроллер 4 поддержания идентификации секундных меток. Сразу после включения питания он приступает к выполнению основной программы, пример алгоритма которой представлен на фиг. 4. Контроллер 4 сначала выполняет инициализацию, которая заключается в следующем:
- разрешаются прерывания по второму входу прерывания контроллера 4 (Int0=1);
- запрещаются прерывания по первому входу прерывания контроллера4 (Int1=0);
- производится настройка параметров последовательного порта USART (входа и выхода идентификации секундных меток) контроллера 4 так, чтобы они соответствовали параметрам выхода RS-232 идентификации секундных меток приемника GPS 1.
После инициализации программа контроллера 4 зацикливается, т. е. переходит в бесконечный цикл, выход из которого возможен только при поступлении запроса на прерывание. После того, как приемник GPS 1 после включения питания установит связь со спутниками, он выдаст на второй вход прерывания контроллера 4 нарастающий фронт первой секундной метки, который и является сигналом прерывания по второму входу прерывания контроллера 4. Т.к. прерывания по этому входу разрешены после инициализации, то контроллер 4 перейдет к выполнению подпрограммы прерывания по второму воду прерывания контроллера 4 (фиг. 5). В соответствии с этим алгоритмом подпрограмма разрешит прием байт(RxEn=1), передачу байт(ТxEn=1), и начнет прием через порт USART (вход идентификации секундных меток контроллера 4) последовательности байт идентификационной информации о текущей секундной метке , поступающей с приемника GPS 1 через блок 2 согласования логических уровней. Полученная последовательность байт будет записана по последовательным адресам в буфер оперативного запоминающего устройства (ОЗУ) контроллера 4 и одновременно передана с выхода 5 формирователя через выход идентификации секундных меток контроллера 4. После завершения приема, записи в буфер ОЗУ и передачи всех идентификационных байт, относящихся к текущей секундной метке, производится разрешение прерываний по первому входу прерывания (Int1=1) контроллера 4, сброс флага запроса на прерывание (IntF1=0) по первому входу прерывания контроллера 4. Необходимость последней операции будет понятна из дальнейшего. После этого производится возвращение из подпрограммы прерывания в бесконечный цикл основной программы. Если за время выполнения этой подпрограммы приемник GPS 1 не потерял связь со спутниками, то в начале следующей астрономической секунды возникнет нарастающий фронт на втором входе прерывания контроллера 4 и с задержкой на 1 такт частоты генератора 3 - на первом входе прерывания, как это было описано выше. Т. к. нарастающий фронт сигнала (причина возникновения запроса на прерывание) на втором входе прерывания контроллера 4 поступил первым, то программа перейдет к обработке запроса на прерывание по второму входу прерывания контроллера 4 поддержания идентификации секундных меток, в результате чего на выход 5 идентификации секундных меток формирователя будет передана идентификационная информация, соответствующая следующей секунде, и она же запишется в буфер ОЗУ контроллера 4 вместо идентификационной информации прошлой секунды. Нарастающий фронт сигнала, возникший на первом входе прерывания контроллера 4 после фронта на втором его входе прерывания, выставит флаг запроса на прерывание по второму входу прерывания (IntF1=1), но самого перехода к обработке прерывания по первому входу прерывания не произойдет, т. к. переход к обработке прерывания, пока не завершена обработка другого прерывания запрещена. Этим и была обусловлена необходимость выполнения в алгоритме подпрограммы обработки прерывания по второму входу контроллера 4 команды сброса флага запроса на прерывание по первому входу прерывания (IntF1=0) контроллера 4, т. к. , если этот флаг не снять, то программа сразу после завершения обработки прерывания по второму входу прерывания контроллера 4 перейдет к выполнению обработки прерывания по первому входу прерывания контроллера 4 в то время, когда импульс секундной метки на выходе 15 секундных меток формирователя уже закончился.
Таким образом, пока приемник GPS 1 не потеряет связь со спутниками, контроллер 4 поддержания идентификации секундных меток будет повторять на выходе 5 идентификации секундных меток формирователя идентификационную информацию о соответствующих секундных метках, поступающую с приемника GPS 1 через блок 2 согласования логических уровней на вход идентификации секундных меток контроллера, а в буфере ОЗУ этого контроллера идентификационная информация о секундных метках будет обновляться каждую секунду и соответствовать последней прошедшей на данный момент секунде.
Если же приемник GPS 1потеряет связь со спутниками, то импульсы секундных меток перестанут поступать на второй вход прерывания контроллера 4, а на второй продолжат, как было описано выше. При поступлении нарастающего фронта импульса на первый вход прерывания контроллера 4 во время отсутствия связи приемника GPS 1 со спутниками программа контроллера 4 прервет бесконечный цикл и перейдет к подпрограмме обработки прерывания по первому входу прерывания контроллера 4 поддержания идентификации секундных меток. В соответствии с алгоритмом этой подпрограммы (фиг. 6) контроллер 4 выберет из буфера ОЗУ с идентификационной информацией байты с временем, соответствующем последней прошедшей секундной метке, прибавит к нему 1 секунду и полученное время запишет на место тех байт в ОЗУ, откуда было произведено чтение. После этого обновленная идентификационная информация из буфера ОЗУ контроллера 4 передается через его выход идентификации секундных меток на выход 5. Так, при прекращении поступления секундных меток на первый вход прерывания контроллера 4 с соответствующего выхода приемника GPS 1 каждый новый нарастающий фронт на первом входе прерывания контроллера 4 будет вызывать увеличение значения времени секундной метки на 1 секунду в записи идентификационной информации, хранимой в буфере ОЗУ контроллера 4 и передачу этой идентификационной информации в течение длительности данной секундной метки. Если связь приемника GP1 со спутниками после перерыва восстанавливается, то, как было описано выше, положительные фронты импульсов поступят и на первый, и на второй входы прерывания контроллера 4. При этом Контроллер 4 сработает также, как и ранее при наличии связи приемника GPS 1 со спутниками. Произойдет запись в буфер ОЗУ контроллера 4 новой достоверной идентификационной информации о текущей секундной метке и ее передача на выход 5 формирователя во время длительности соответствующей секундной метки.
Таким образом, в предлагаемом формирователе сигналов астрономического времени для автономных цифровых сейсмометров происходит автоматическое восстановление как параметров самих секундных меток, так и их идентификационной информации после восстановления приемником GPS 1 связи со спутниками после ее перерыва. За счет этого и достигается цель изобретения - повышение надежности формирователя.
Совокупность узлов предложенного устройства: Т-триггер 6, D-триггер 7, элемент И 8, элемент ИЛИ 9, двоичный счетчик 10, первый цифровой компаратор 13, второй цифровой компаратор 14 - вместе с соответствующими связями может быть реализована как в виде отдельных микросхем, так и в виде одной программируемой логической интегральной схемы (ПЛИС), например, EPM 7032. В качестве тактового генератора 3 может быть использован высокостабильный термостатированный генератор прямоугольных сигналов ГК410 частотой 10 МГц. В качестве контроллера 4 поддержания идентификации секундных меток может быть использован 8-и разрядный AVR контроллер ATtiny2313.
Предложенное устройство было разработано для проведения
прецизионных сейсмологических измерений в рамках реализации проекта № 122040400015-5 (FMWN-2022-0017) «Структурные особенности и динамика недр Земли - коры, верхней мантии и внутреннего ядра по сейсмическим данным».
Проведенные работы подтвердили достижение в предложенной совокупности существенных признаков поставленной цели изобретения.
Список литературы.
1. Патент РФ № 2400777, 27.09.2010, МПК: G01V 1/16(2006. 01).
2. Патент РФ № 2435175, 27.11.2011, МПК: G01V 1/16(2006. 01).
3. Патент РФ № 2805775, 24.10.2023, МПК: G01V 1/16(2023. 08).
4. GARMIN. GPS 25 LP series GPS sensor boards GPS25-LVC, GPS25-LVS, GPS 25-HVS. Technical Specification.
| название | год | авторы | номер документа |
|---|---|---|---|
| Формирователь сигналов астрономического времени для автономных цифровых сейсмометров | 2023 |
|
RU2805775C1 |
| АВТОНОМНЫЙ ЦИФРОВОЙ СЕЙСМОМЕТР | 2010 |
|
RU2435175C1 |
| АВТОНОМНЫЙ ЦИФРОВОЙ СЕЙСМОМЕТР | 2010 |
|
RU2434249C1 |
| АВТОНОМНЫЙ СЕЙСМОПРИЕМНИК С ЦИФРОВОЙ РЕГИСТРАЦИЕЙ СЕЙСМИЧЕСКИХ ДАННЫХ | 2009 |
|
RU2400777C1 |
| Устройство для съема информации с ферромагнитного колеса железнодорожного транспортного средства | 1988 |
|
SU1588617A1 |
| ИНТЕГРИРОВАННЫЙ ПРИЕМНИК СИГНАЛОВ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1999 |
|
RU2146378C1 |
| Устройство для ввода информации | 1986 |
|
SU1377862A1 |
| АВТОНОМНЫЙ РЕГИСТРАТОР СЕЙСМИЧЕСКИХ СИГНАЛОВ И УСТРОЙСТВО АВТОМАТИЧЕСКОЙ НАСТРОЙКИ И КОРРЕКЦИИ ТАКТОВОЙ ЧАСТОТЫ АВТОНОМНОГО РЕГИСТРАТОРА СЕЙСМИЧЕСКИХ СИГНАЛОВ | 2008 |
|
RU2366981C1 |
| МНОГОКАНАЛЬНЫЙ КОРРЕЛЯТОР И ПРИЕМНИК НАВИГАЦИОННЫЙ | 2008 |
|
RU2388009C2 |
| ИНФРАКРАСНЫЙ РАДИОМЕТР | 1999 |
|
RU2172476C1 |
Изобретение относится к устройствам для формирования сигналов астрономического времени для автономных цифровых сейсмометров. Сущность: устройство содержит приемник (1) GPS, блок (2) согласования логических уровней, тактовый генератор (3), контроллер (4) поддержания идентификации секундных меток, выход (5) идентификации секундных меток, Т-триггер (6), D-триггер (7), элемент И (8), элемент ИЛИ (9), двоичный счетчик (10), шину (11) постоянного потенциала уровня логического “0”, шину (12) постоянного потенциала уровня логической “1”, первый цифровой компаратор (13), второй цифровой компаратор (14), выход (15) секундных меток формирователя. Технический результат: повышение надежности устройства. 6 ил.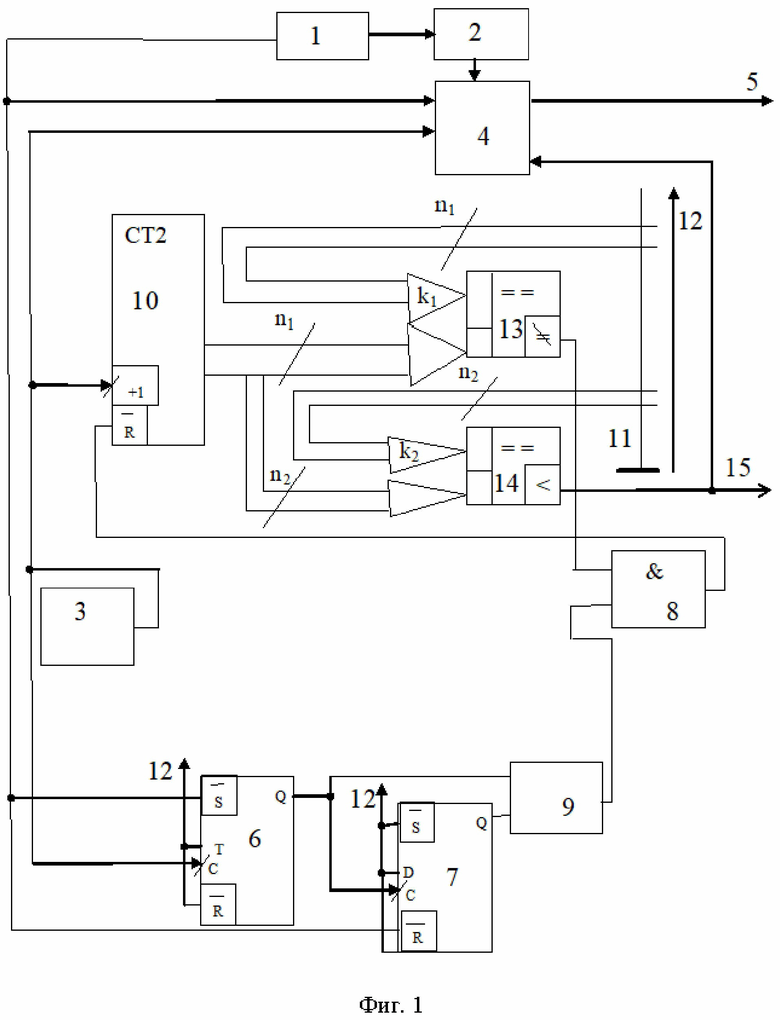
Формирователь сигналов астрономического времени для автономных цифровых сейсмометров, содержащий приемник GPS, блок согласования логических уровней, вход которого соединен с выходом идентификации секундных меток приемника GPS, тактовый генератор, контроллер поддержания идентификации секундных меток, тактовый вход которого соединен с выходом тактового генератора, вход идентификации секундных меток контроллера поддержания идентификации секундных меток соединен с выходом блока согласования логических уровней, выход контроллера поддержания идентификации секундных меток является выходом идентификации секундных меток формирователя, а первый вход прерывания контроллера поддержания идентификации секундных меток соединен с выходом секундных меток формирователя, причем контроллер поддержания идентификации секундных меток имеет программу, заключенную в нем, обеспечивающую прием сообщений о времени текущей секундной метки при наличии секундных меток от приемника GPS, расчет времени секундной метки при прекращении секундных меток от приемника GPS и выдачу идентификационной информации о текущей секундной метке на выходе этого контроллера в формате протокольного сообщения приемника GPS, отличающийся тем, что с целью повышения надежности формирователя он содержит Т-триггер, D-триггер, элемент И, элемент ИЛИ, двоичный счетчик, шину постоянного потенциала уровня логического “0”, шину постоянного потенциала уровня логической “1”, два цифровых компаратора, причем двоичный счетчик и первый цифровой компаратор имеют количество разрядов не менее n1=[log2k1], где
k1 - ближайшее целое до числа fг. ⋅TPPS, где
fг. - частота тактового генератора,
TPPS=1с - период импульсов секундных меток,
а второй цифровой компаратор имеет количество разрядов не менее n2=[log2 k2], где
k2 - ближайшее целое до числа fг.⋅ tдл., где
tдл. – длительность импульса секундной метки,
входы сравнения первой группы первого цифрового компаратора соединены с соответствующими шинами постоянного потенциала уровней логического “0” и логической “1” таким образом, что на входы сравнения первой группы первого цифрового компаратора поступает двоичный код числа k1, входы сравнения второй группы первого цифрового компаратора соединены с выходами соответствующих разрядов двоичного счетчика, счетный вход суммирования которого соединен с выходом тактового генератора и тактовым входом Т-триггера, выход которого соединен с тактовым входом D-триггера и первым входом элемента ИЛИ, второй вход которого соединен с выходом D-триггера, а выход элемента ИЛИ соединен с первым входом элемента И, второй вход которого соединен с выходом “не равно” первого цифрового компаратора, выход элемента И соединен с входом сброса двоичного счетчика, вход сброса Т-триггера соединен с его Т-входом, входом установки, D-входом D-триггера и с шиной постоянного потенциала уровня логической “1”, вход установки Т-триггера соединен с входом сброса D-триггера, вторым входом прерывания контроллера поддержания идентификации секундных меток и с выходом секундных меток приемника GPS, входы сравнения первой группы второго цифрового компаратора соединены с соответствующими шинами постоянного потенциала уровней логического “0” и логической “1” таким образом, что на входы сравнения первой группы второго цифрового компаратора поступает двоичный код числа k2, входы сравнения второй группы второго цифрового компаратора соединены с выходами соответствующих разрядов двоичного счетчика, а выход “меньше” второго цифрового компаратора является выходом секундных меток формирователя.
| Формирователь сигналов астрономического времени для автономных цифровых сейсмометров | 2023 |
|
RU2805775C1 |
| АВТОНОМНЫЙ ЦИФРОВОЙ СЕЙСМОМЕТР | 2010 |
|
RU2434249C1 |
| АВТОНОМНЫЙ РЕГИСТРАТОР СЕЙСМИЧЕСКИХ СИГНАЛОВ | 2007 |
|
RU2331087C1 |

