Изобретение относится к сейсмологии, а точнее к аппаратуре для сейсмических исследований, и может быть использовано при создании систем регистрации сейсмических данных.
Известен формирователь сигналов астрономического времени для автономных цифровых сейсмометров, содержащий приёмник GPS [1].
Недостатком известного устройства является то, что оно обеспечивает точную привязку регистрируемого сейсмического сигнала к астрономическому времени только при условии устойчивой связи приёмника GPS к спутникам этой системы. Это условие выполняется не всегда, например, при плотной облачности. Потеря синхронизации может длиться сутками, что совершенно недопустимо, особенно во время продолжительных сейсмических мониторингов.
Известен также формирователь сигналов астрономического времени для автономных цифровых сейсмометров, содержащий приёмник GPS, блок согласования логических уровней, вход которого соединён с выходом идентификации секундных меток приёмника GPS [2].
Данный формирователь также имеет низкую надёжность по тем же причинам, что и [1].
Наиболее близким техническим решением к предлагаемому и принятым за прототип является формирователь сигналов астрономического времени для автономных цифровых сейсмометров, содержащий приёмник GPS, блок согласования логических уровней, вход которого соединён с выходом идентификации секундных меток приёмника GPS [3].
К недостаткам известного технического решения также можно отнести низкую надёжность, т.к. такой формирователь сигналов астрономического времени для автономных цифровых сейсмометров при потере связи со спутниками GPS перестаёт давать синхроимпульсы секундных меток, а также даёт искажённую информацию на выходе идентификации секундной метки.
Кроме того, известное техническое решение имеет узкую область применения, т. к. оно не может работать в условиях, где вообще нет связи со спутниками GPS, например, при проведении сейсмических исследований в глубокой шахте.
Целью изобретения является повышение надёжности и расширение области применения устройства для синхронизации сейсмических данных с астрономическим временем.
Поставленная цель достигается тем, что устройство для синхронизации сейсмических данных с астрономическим временем содержит высокостабильный тактовый генератор, контроллер поддержания параметров секундной метки, контроллер поддержания идентификации секундных меток, тактовый вход которого соединён с тактовым входом контроллера поддержания параметров секундной метки и выходом тактового генератора, вход прерывания контроллера поддержания параметров секундной метки соединён с выходом секундных меток приёмника GPS, а выход соединён с входом прерывания контроллера поддержания идентификации секундных меток и является выходом секундных меток формирователя, выходом идентификации секундных меток которого является выход контроллера поддержания идентификации секундных меток, вход идентификации секундных меток которого соединён с выходом блока согласования логических уровней, причём контроллер поддержания параметров секундной метки имеет программу, заключённую в нём, обеспечивающую измерение периода сигналов секундных меток при их наличии на входе прерывания этого контроллера, запоминание периода сигналов секундных меток во внутренней памяти этого контроллера и воспроизведение этих сигналов на выходе контроллера поддержания параметров секундной метки при прекращении поступления сигналов секундных меток от приёмника GPS, а контроллер поддержания идентификации секундных меток имеет программу, заключённую в нём, обеспечивающую приём сообщений о времени текущей секундной метки при наличии секундных меток от приёмника GPS , расчёт времени секундной метки при прекращении секундных меток от приёмника GPS и выдачу идентификационной информации о текущей секундной метке на выходе этого контроллера в формате протокольного сообщения приёмника GPS.
Совокупность существенных признаков данного технического решения: «высокостабильный тактовый генератор, контроллер поддержания параметров секундной метки, контроллер поддержания идентификации секундных меток, тактовый вход которого соединён с тактовым входом контроллера поддержания параметров секундной метки и выходом тактового генератора, вход прерывания контроллера поддержания параметров секундной метки соединён с выходом секундных меток приёмника GPS, а выход соединён с входом прерывания контроллера поддержания идентификации секундных меток и является выходом секундных меток формирователя, выходом идентификации секундных меток которого является выход контроллера поддержания идентификации секундных меток, вход идентификации секундных меток которого соединён с выходом блока согласования логических уровней, причём контроллер поддержания параметров секундной метки имеет программу, заключённую в нём, обеспечивающую измерение периода сигналов секундных меток при их наличии на входе прерывания этого контроллера, запоминание периода сигналов секундных меток во внутренней памяти этого контроллера и воспроизведение этих сигналов на выходе контроллера поддержания параметров секундной метки при прекращении поступления сигналов секундных меток от приёмника GPS, а контроллер поддержания идентификации секундных меток имеет программу, заключённую в нём, обеспечивающую приём сообщений о времени текущей секундной метки при наличии секундных меток от приёмника GPS, расчёт времени секундной метки при прекращении секундных меток от приёмника GPS и выдачу идентификационной информации о текущей секундной метке на выходе этого контроллера в формате протокольного сообщения приёмника GPS - обеспечивает формирование на выходе секундной метки формирователя астрономического времени для автономных цифровых сейсмометров импульсов секундных меток, сопровождаемых достоверной идентификационной информацией на выходе идентификации секундных меток формирователя при потере связи приёмника GPS со спутниками GPS, что повышает надёжность работы формирователя.
Кроме того, при проведении сейсмических исследований в местах, где связь со спутниками GPS в принципе отсутствует, например, в шахте, можно сначала произвести привязку формирователя к астрономическому времени на поверхности земли, а затем переместить формирователь в шахту и подключить его к сейсмометру вместо приёмника GPS. Таким образом, формирователь сигналов астрономического времени для автономных цифровых сейсмометров имеет возможность работать в местах, недоступных сигналам спутникам GPS, что обуславливает расширение его области применения.
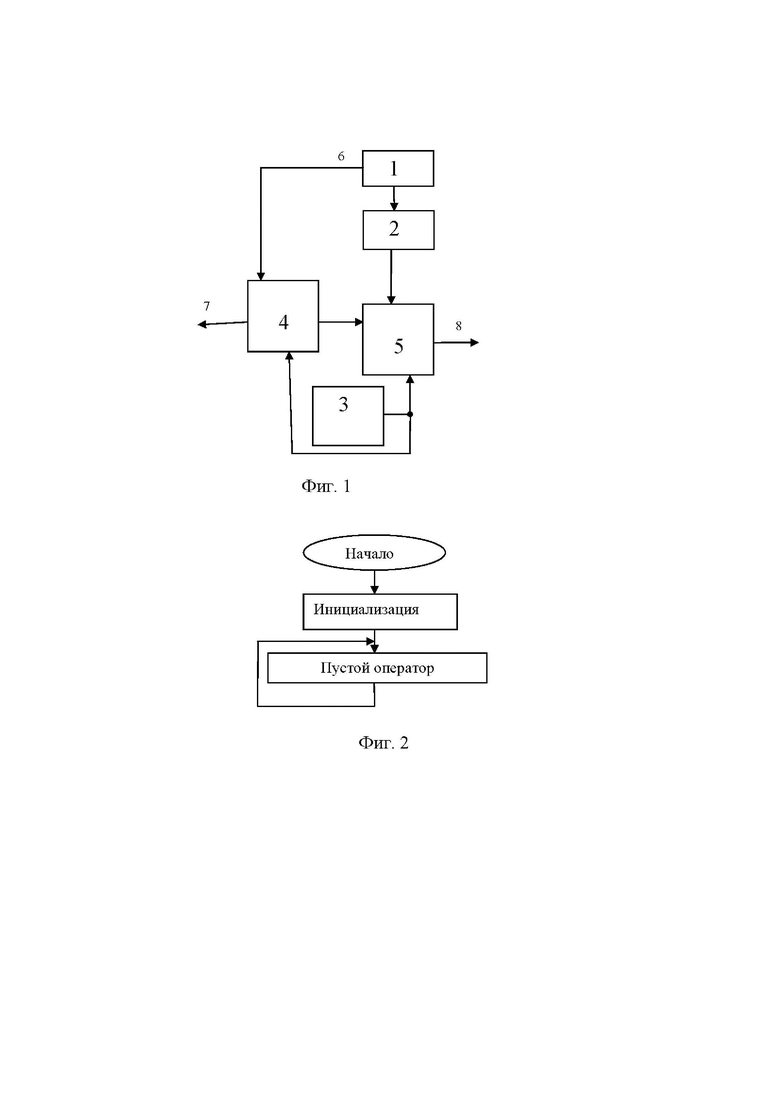
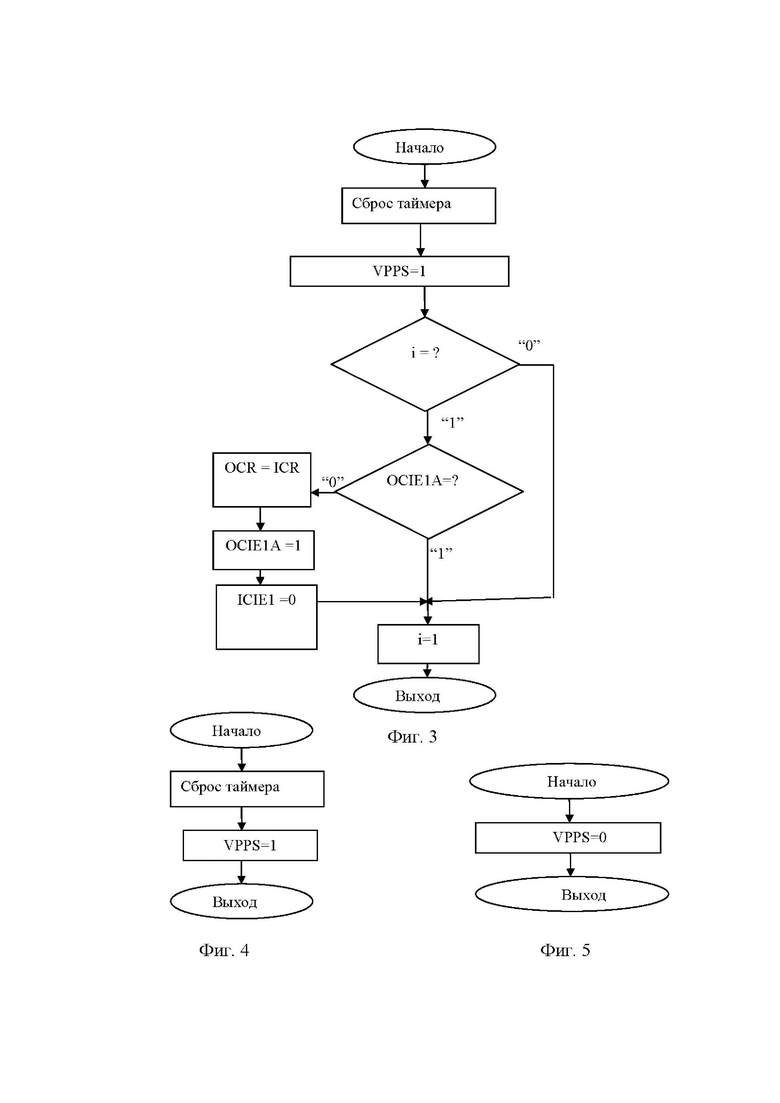
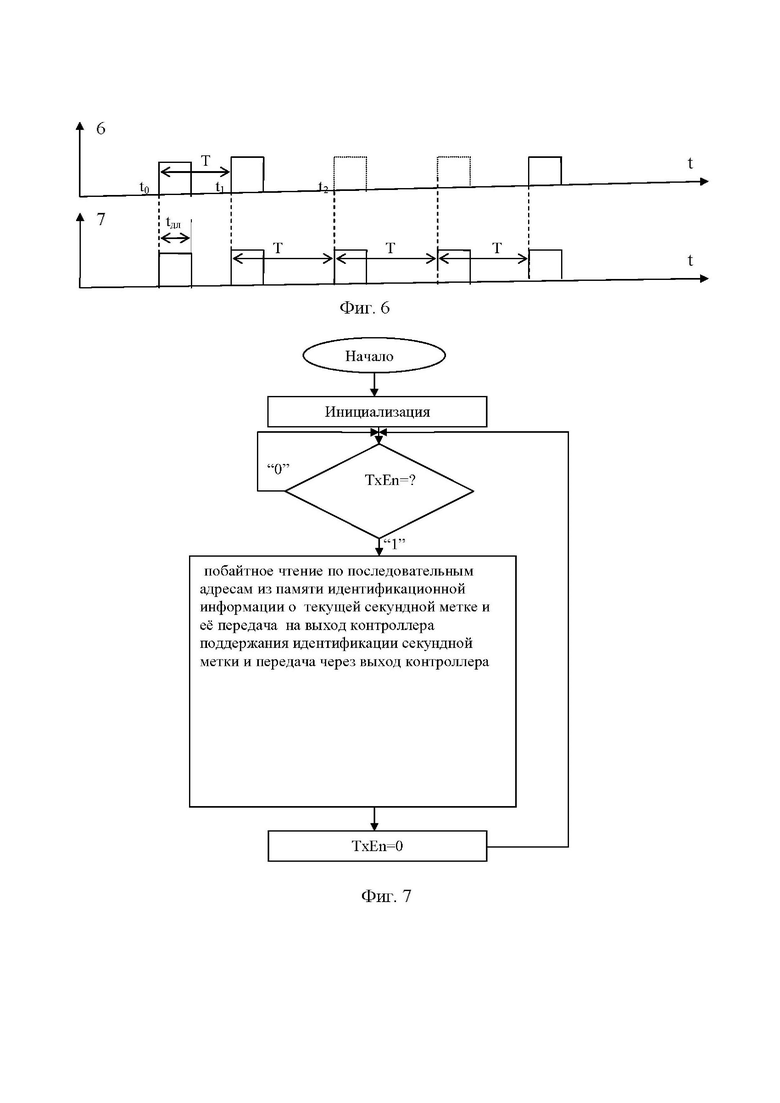
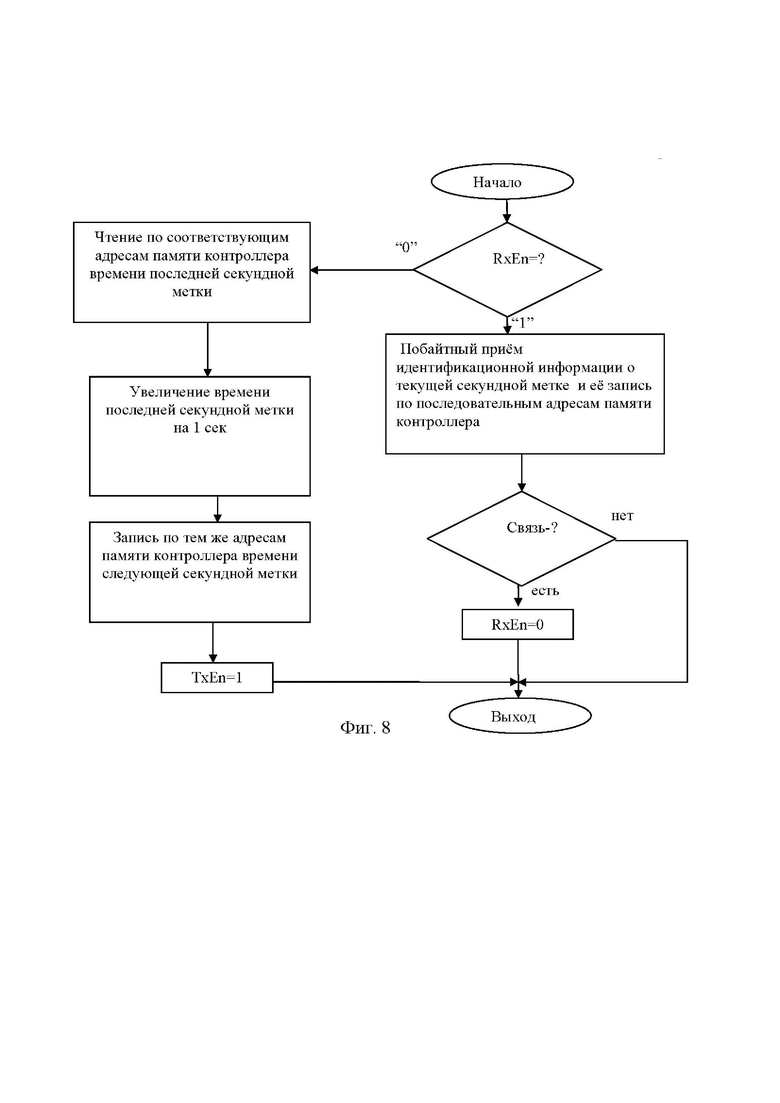
На фиг. 1 представлена блок-схема формирователя сигналов астрономического времени для автономных цифровых сейсмометров, на фиг. 2 – пример алгоритма работы основной программы, заключённой в контроллере поддержания параметров секундной метки, на фиг. 3 – пример алгоритма подпрограммы обработки прерывания, вызванного нарастающем фронтом сигнала секундной метки на входе прерывания контроллера поддержания параметров секундной метки, на фиг. 4 – пример алгоритма работы подпрограммы обработки прерываний, вызываемых таймером контроллера поддержания параметров секундных меток при достижении этим таймером времени периода импульсов секундных меток, заключённой в контроллере поддержания параметров секундной метки, на фиг. 5 – пример алгоритма работы подпрограммы обработки прерываний, вызываемых таймером контроллера поддержания параметров секундной метки при достижении этим таймером времени длительности импульса секундной метки, заключённой в контроллере поддержания параметров секундной метки, на фиг. 6 - временная диаграмма, поясняющая работу контроллера поддержания параметров секундной метки, на фиг. 7 – пример алгоритма работы основной программы, заключённой в контроллере поддержания идентификации секундных, на фиг. 8 – пример алгоритма подпрограммы обработки прерывания, вызванного нарастающем фронтом сигнала на входе прерывания контроллера поддержания идентификации секундных меток.
Формирователь сигналов астрономического времени для цифровых сейсмометров (фиг. 1) содержит приёмник GPS 1, блок 2 согласования логических уровней, высокостабильный тактовый генератор 3, контроллер 4 поддержания параметров секундной метки, контроллер 5 поддержания идентификации секундных меток, тактовый вход которого соединён с выходом тактового генератора 3 и с тактовым входом контроллера 4, вход прерывания которого соединён с выходом 6 секундных меток приёмника GPS 1, а выход контроллера 4 соединён с входом прерывания контроллера 5 и является выходом 7 секундных меток формирователя, выходом 8 идентификации секундных меток которого является выход контроллера 5, вход идентификации секундных меток которого соединён с выходом блока 2 согласования логических уровней, вход которого соединён с выходом идентификации секундных меток приёмника GPS 1.
Устройство работает следующим образом.
После включения питания у приёмника GPS 1 некоторое время уходит на то, что бы установить связь со спутниками. После того, как связь установлена, на выходе 6 приёмник GPS 1 каждую секунду вырабатывает импульс секундной метки, нарастающий фронт которого совпадает с началом секунды астрономического времени. Одновременно на выходе идентификации секундных меток приёмника GPS 1 каждый импульс секундной метки сопровождается последовательным кодом в стандарте электрических сигналов RS-232, содержащим информацию о его времени [1]. Блок 2 согласования логических уровней преобразует уровни электрических сигналов, соответствующих стандарту RS-232, в стандартные логические уровни микросхем ТТЛ/КМОП.
После включения питания контроллер 4 переходит к выполнению своей основной программы (фиг. 2). Инициализация контроллера 4 заключается в выполнении следующих операций:
1. Установка на выходе контроллера 4 (выходе 7 формирователя) значения логического уровня сигнала VPPS=0;
2. разрешение прерываний при поступлении на вход прерывания контроллера 4 нарастающего фронта сигнала (установка значения переменной ICIE1=1);
3. разрешение захвата содержимого таймера контроллера 4 в момент поступления нарастающего фронта сигнала на вход прерывания этого контроллера 4 и сохранения этого захваченного содержимого в регистре захвата таймера ICR;
4. запрещение прерываний по сравнению таймера по каналу A (OCIE1A=0);
5. загрузка в регистр сравнения таймера OCR1B значения целой части переменной N=tдл.*fген., где tдл.- приблизительная длительность импульса секундной метки, формируемого приёмником GPS 1 (обычно tдл.300 мс), а fген. - частота тактового генератора 3;
6. разрешение прерываний по сравнению таймера контроллера 4 по каналу B (OCIE1B=1);
1. запрещение прерываний по сравнению таймера контроллера 4 по каналу A (OCIE1A=0);
2. присвоение переменной i значение i=0.
После проведения инициализации основная программа, заключённая в контроллере 4, переходит в бесконечный цикл, не выполняя при этом никаких операций. Выход из этого цикла возможен только в какую-нибудь подпрограмму обработки прерывания при возникновении соответствующего запроса на прерывание.
Установка приёмником GPS 1 связи со спутниками занимает обычно около 10 с. За это время основная программа контроллера 4 успевает завершить инициализацию и перейти в бесконечный цикл, ожидая запросы на прерывания. После установки приёмником GPS 1 связи со спутниками на его выходе 6 начинают появляться импульсы секундных меток (фиг. 6), нарастающие фронты которых совпадают с началом секунд астрономического времени. Первая секундная метка после установления приёмником GPS 1 связи со спутниками появляется в момент времени t0 (фиг. 6). В этот же момент времени на вход прерывания контроллера 4 поступит нарастающий фронт импульса секундной метки, который вызовет соответствующий запрос на прерывание в этом контроллере 4. По этому запросу контроллер 4 прервёт выполнение основной программы (фиг. 2) и перейдёт к выполнению соответствующей запросу подпрограмме обработки прерывания (фиг. 3), которая сначала сбрасывает таймер контроллера 4 (таймер контроллера 4 после сброса начинает отсчитывать такты генератора 3 с нуля). После этого подпрограмма прерывания (фиг. 3) устанавливает VPPS=1 (логический уровень «1» на выходе контроллера 4 и, что то же самое, на выходе 7 секундной метки формирователя (фиг. 6). Таким образом, нарастающий фронт импульса на выходе 7 секундной метки формирователя повторит нарастающий фронт импульса секундной метки на выходе 6 секундной метки приёмника GPS 1.
Строго говоря, нарастающий фронт на выходе 7 формирователя будет отставать на несколько тактов тактового генератора 3 от нарастающего фронта импульса секундной метки на выходе 6 приёмника GPS 1. Чем выше частота задающего генератора 3, тем незначительнее эта разница между временами нарастающих фронтов. Так, если fген.=10 MГц, то разница между фронтами не превысит десятых долей мкс. А, т. к. погрешность времени нарастающего фронта импульса секундной метки на выходе 6 приёмника GPS 1 составляет 1 мкс, то расхождением нарастающих фронтов сигналов на выходах 6 и 7 можно пренебречь.
После формирования нарастающего фронта на выходе контроллера 4 подпрограмма обработки прерывания (фиг. 3) проверяет значение переменной i, установленной при инициализации i=0. Если по-прежнему i=0, то подпрограмма меняет значение переменной на i=1 и возвращается в то же место основной программы, откуда было вызвано прерывание, т. е. - в бесконечный цикл основной программы (фиг. 2).
Т. к. при инициализации контроллера 4 были разрешены только прерывания по нарастающему фронту сигнала на входе прерывания того контроллера 4 и по сравнению по каналу В таймера этого; t контроллера 4. При этом в регистр сравнения по каналу В таймера этого контроллера 4 было записано число N, соответствующее времени tдл.300 мс, что означает, что таймер, досчитав до N тактов тактового генератора 3, выдаст запрос на прерывание по сравнению по каналу B таймера. После сброса таймера в момент времени t0 следующий нарастающий фронт импульса секундной метки на вход прерывания контроллера может поступить не ранее, чем через 1 с, а таймер контроллера 4 настроен так, что он даст запрос на прерывание по сравнению по каналу В через время tдл.300 мс, т. е. раньше поступления нарастающего фронта импульса секундной метки (фиг. 6). Таким образом, в момент времени t0+tдл. таймер контроллера 4 производит запрос на прерывание по сравнению по каналу В, обработка которого происходит в соответствии с алгоритмом (фиг. 5). Выйдя на обработку прерывания по сравнению таймера по каналу B, соответствующая подпрограмма устанавливает на выходе контроллера 4, т. е. и на выходе формирователя значение сигнала VPPS=0, закончив тем самым формирование на выходе 7 формирователя импульс секундной метки для момента времени t0 (фиг. 6).После установки VPPS=0 таймер продолжает дальнейший отсчёт времени в тактах генератора 3, а подпрограмма прерывания (фиг. 5) возвращается в бесконечный цикл основной программы (фиг. 2) контроллера 4, где вновь происходит ожидание очередного запроса на прерывание. Если этим запросом снова окажется запрос на прерывание по сравнению по каналу B, то программа выйдет на обработку этого прерывания и, ничего не изменив, вернётся в основную программу, т. к. и так уже VPPS=0. Если же раньше поступит нарастающий фронт следующего импульса секундной метки (момент времени t1(фиг. 6), то сначала произойдёт захват контроллером 4 времени нарастающего фронта и сохранение этого времени в регистре ICR таймера. Т. к. последний сброс таймера перед нарастающим фронтом второго сигнала секундной метки в момент времени t1 производился нарастающим фронтом первого сигнала секундной метки в момент времени t0(фиг.2 и 6), то в регистре ICR таймера будет сохранено значение, соответствующее времени T=t1-t0, где T-период следования импульсов секундных меток. После захвата времени таймера возникнет запрос на прерывание по нарастающему фронту сигнала на входе прерывания контроллера 4, по которому произойдёт переход из бесконечного цикла основной программы (фиг. 2) к подпрограмме обработки прерывания (фиг. 3), в соответствии с алгоритмом которой программа производит сброс таймера, установку логической «1» VPPS=1 на выходе контроллера 4, т. е. на выходе 7 формирователя (момент времени t1(фиг. 6)). Т. к. во время выполнения подпрограммы прерывания (фиг. 3) при обработке первого импульса секундной метки, поступившего в момент времени t0, значение переменной i изменилось на i =1, то подпрограмма обработки прерывания при поступлении второго импульса секундной метки в момент t1 (фиг. 3) после проверки значения i перейдёт к проверке: разрешено или нет прерывание по сравнению по таймеру по каналу A, что определяется значением переменной OCIE1A. Если OCIE1A=1, то это прерывание разрешено, если OCIE1A=0 – нет. Если указанное прерывание не разрешено, то подпрограмма (фиг. 3) подтверждает i=1 и возвращается в бесконечный цикл основной программы (фиг. 2). Если же при проверке OCIE1A оказалось, что OCIE1A=0, то подпрограмма перебрасывает из регистра захвата ICR захваченное значение времени T в регистр сравнения OCR1A по каналу A, разрешает прерывания по сравнению по таймеру по каналу A (OCIE1A=1), запрещает прерывания по нарастающему фронту сигнала на входе прерывания (ICIE1=0) контроллера 4.
Всё это означает, что означает, что теперь при достижении временем таймера времени в его регистре сравнения OCR1A, в контроллере 4 будет вырабатываться запрос на прерывание по сравнению по каналу A таймера, а запросов на прерывание по нарастающим фронтам сигналов на входе прерывания контроллера 4 вырабатываться больше не будет. Затем подпрограмма обработки прерываний подтверждает i=1 и возвращается в бесконечный цикл основной программы (фиг. 2). По истечении времени tдл. после сброса таймера подпрограммой прерывания по нарастающему фронту сигнала на входе прерывания контроллера 4 в момент времени t1 возникнет запрос на прерывание по сравнению по каналу B таймера. По этому запросу произойдёт переход к подпрограмме обработки соответствующего прерывания (фиг. 5), которая установит VPPS=0, сформировав тем самым спадающий фронт второго импульса секундной метки на выходе 7 формирователя (фиг. 6). При этом таймер контроллера 4 будет продолжать отсчёт времени (тактовых импульсов генератора 3), начатый в момент времени t1. Т. к. в регистр сравнения канала A таймера (OCR1A) было перегружено из его регистра захвата (ICR1) значение времени T периода следования секундных меток, то через это время после t1 (момент t2) возникнет запрос на прерывание по сравнению по каналу A таймера, и контроллер 4 выйдет из бесконечного цикла основной программы (фиг. 2) в соответствующую запросу подпрограмму обработки прерывания (фиг. 4).
Эта подпрограмма сбрасывает таймер, устанавливает «1» (VPPS=1) в момент времени t2, отстоящий на период T следования импульсов секундных меток от момента t1 на выходе 7 формирователя (фиг. 6). Таймер контроллера 4 при этом продолжает отсчёт тактов генератора 3. За счёт этого запросы на прерывания (фиг. 4 и 5) будут циклически генерироваться и обеспечат на выходе 7 формирователя генерацию импульсов секундных мерок даже при отсутствии их на выходе 6 приёмника GPS 1 (фиг. 6), т. е при потере приёмником GPS 1 связи со спутниками. Очевидно, что точность соответствия нарастающих фронтов секундных меток на выходе 7 формирователя, сформированных подпрограммой обработки прерывания (фиг. 4) началам секунд астрономического времени определяется точностью и стабильностью генератора 3. Использование в качестве генератора 3 высокостабильного термостатированного генератора фирмы Bliley BOV TJ-10M позволяет осуществлять выработку формирователем на его выходе 7 сигналов секундных меток, нарастающий фронт которых не отличается от начал астрономических секунд более, чем на 1 мкс при потере связи приёмника GPS 1 со спутниками не менее, чем на сутки.
Контроллеры 4, 5 могут быть контроллерами серии AVR фирмы Atmel, имеющие необходимые таймеры, входы внешних прерываний и интерфейсы последовательного ввода и вывода данных, например AtTiny2313.
Инициализация контроллера 5 при выполнении его основной программы (фиг. 7) также успевает произойти до того, как приёмник GPS 1 установит связь со спутниками. Инициализация контроллера 5 заключается в выполнении следующих операций:
1. разрешение прерываний (INT0=1) по нарастающему фронту (ISC00=3) сигнала на входе прерывания контроллера 5;
2. разрешение приёма идентификационной информации о секундных метках (RxEn=1) на вход идентификации секундных меток этого контроллера 5;
3. запрет передачи идентификационной информации о секундных метках (TxEn=0) через выход контроллера 5.
После инициализации основная программа (фиг. 7) контроллера 5 проверяет значение переменной TxEn и, если TxEn=0, что и было установлено при инициализации, программа возвращается к проверке этой переменной, которая в основной программе не изменяет своего значения. Таким образом программа переходит в бесконечный цикл, выйти из которого она сможет только по запросу на прерывание, и, если в подпрограмме обработки прерывания TxEn изменит своё значение с TxEn=0 на TxEn=1 и с этим значением вернётся в это же место основной программы.
При поступлении на вход прерывания контроллера 5 нарастающего фронта с выхода контроллера 4 и, что то же самое, с выхода 7 секундной метки формирователя в контроллере 5 возникнет запрос на прерывание и произойдёт выход из бесконечного цикла основной программы (фиг. 7) контроллера 5 в его подпрограмму обработки прерывания (фиг. 8), которая сначала проверит значение переменной RxEn. Если RxEn=1, как было установлено при инициализации, то подпрограмма осуществляет побайтный приём идентификационной информации о текущей секундной метке и её запись по последовательным адресам памяти контроллера 5.
Таким образом, в память контроллера 5 побайтно прописывается весь пакет идентификационной информации секундной метки в том виде, в каком он поступает с приёмника GPS 1 через преобразователь 2. Среди этой идентификационной информации имеется байт, указывающий, была ли связь со спутниками во время приёма идентификационной информации о данной секундной метке или нет, т. е. можно ли считать идентификационную информацию о данной секундной метке достоверной. Поэтому сразу после приёма всего пакета идентификационной информации о текущей секундной метке проводится проверка на достоверность этого пакета. Если оказывается, что пакет недостоверен, то сразу происходит возвращение в то место основной программы (фиг. 7), откуда была вызвана подпрограмма прерывания (фиг. 8), не изменив при этом никаких значений переменных основной программы. В противном случае перед возвращением в основную программу устанавливается RxEn=0, что означает, что в памяти контроллера 5 достоверная идентификационная информация о текущей секундной метке.
Если после выхода в подпрограмму обработки прерывания (фиг. 8), проверка RxEn показала, что RxEn=0, то подпрограмма читает по соответствующим адресам памяти контроллера байты, относящиеся только к времени последней секундной метки, увеличивает значение этого времени на 1 сек и записывает по тем же адресам новое значение времени, которое будет использовано для формирования пакета идентификационной информации следующей секундной метки. После этого устанавливается признак TxEn=1, и происходит возврат в бесконечный цикл основной программы (фиг. 7). В подпрограмме прерывания (фиг. 8) признак TxEn изменился с «0» на «1», поэтому основная программа выйдет из бесконечного цикла и перейдет к побайтному чтению по последовательным адресам из памяти идентификационной информации о текущей секундной метке и созданной из пакета идентификационной информации прошлой секундной метки, её передаче на выход контроллера 5 и выход 8 формирователя.
Таким образом, при потере приёмником GPS 1 связи со спутниками контроллер 4 совместно с генератором 3 формируют сигналы секундных меток на выходе 7 формирователя, а контроллер 5 формирует во время потери связи со спутниками достоверную идентификационную информацию для секундных меток на выходе 8 формирователя, что повышает надёжность работы формирователя сигналов астрономического времени для автономных цифровых сейсмометров.
Кроме того, при проведении сейсмологических исследований в местах, где сигналы спутников GPS недоступны, предлагаемый формирователь может быть сначала синхронизирован со спутниками GPS там, где такая связь есть, а затем перемещён непосредственно к месту проведения исследований и там использоваться вместо приёмника GPS. Это позволяет достигнуть другой цели изобретения – расширения области применения формирователя сигналов астрономического времени для автономных цифровых сейсмометров.
Предложенное устройство было разработано для проведения прецизионных сейсмологических измерений в рамках реализации проекта №122040400015-5 (FMWN-2022-0017) «Структурные особенности и динамика недр Земли - коры, верхней мантии и внутреннего ядра по сейсмическим данным» и использовано при проведении прецизионных сейсмологических измерений.
Проведённые работы подтвердили достижение в предложенной совокупности существенных признаков поставленных целей изобретения.
Список литературы
1. GARMIN. GPS 25 LP series GPS sensor boards GPS25-LVC, GPS25-LVS, GPS25-HVS. Technical Specification.
2. Патент РФ №2400777, 27.09.2010, МПК: G01V 1/16(2006. 01).
3. Патент РФ №2435175, 27.11.2011, МПК: G01V 1/16(2006. 01).
| название | год | авторы | номер документа |
|---|---|---|---|
| Формирователь сигналов астрономического времени для автономных цифровых сейсмометров | 2024 |
|
RU2824343C1 |
| АВТОНОМНЫЙ ЦИФРОВОЙ СЕЙСМОМЕТР | 2010 |
|
RU2434249C1 |
| АВТОНОМНЫЙ ЦИФРОВОЙ СЕЙСМОМЕТР | 2010 |
|
RU2435175C1 |
| АВТОНОМНЫЙ СЕЙСМОПРИЕМНИК С ЦИФРОВОЙ РЕГИСТРАЦИЕЙ СЕЙСМИЧЕСКИХ ДАННЫХ | 2009 |
|
RU2400777C1 |
| КОНТРОЛЛЕР | 1991 |
|
RU2012043C1 |
| Устройство для отладки программ микроЭВМ | 1989 |
|
SU1815643A1 |
| СПОСОБ СИНХРОНИЗАЦИИ ШКАЛ ВРЕМЕНИ | 1997 |
|
RU2146833C1 |
| Способ синхронизации шкал времени в сети радиосвязи | 2022 |
|
RU2792720C1 |
| СИСТЕМА НА ОПТИЧЕСКИХ ДИСКАХ | 1996 |
|
RU2181217C2 |
| Система обмена данными в вычислительной сети | 1991 |
|
SU1807493A1 |
Изобретение относится к приёмникам сейсмических сигналов и может быть использовано при создании систем регистрации сейсмических данных. Заявленное устройство содержит приёмник GPS, преобразователь логических уровней. Дополнительно в устройство введён тактовый генератор, контроллер поддержания параметров секундной метки, который имеет программу, заключённую в нём, обеспечивающую измерение периода сигналов секундных меток при их наличии, его запоминание во внутренней памяти этого контроллера и воспроизведение сигналов секундных меток на его выходе при прекращении поступления сигналов секундных меток от приёмника GPS. Технический результат - повышение надёжности и расширение области применения формирователя. 8 ил.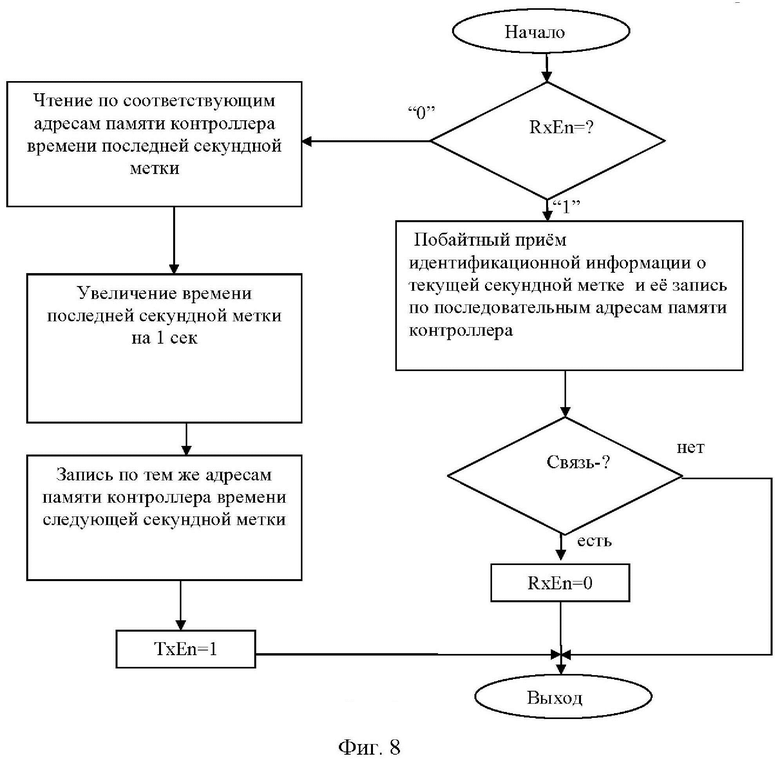
Формирователь сигналов астрономического времени для автономных цифровых сейсмометров, содержащий приёмник GPS, блок согласования логических уровней, вход которого соединён с выходом идентификации секундных меток приёмника GPS, отличающийся тем, что с целью повышения надёжности формирователя и расширения области его применения он содержит тактовый генератор, контроллер поддержания параметров секундной метки, контроллер поддержания идентификации секундных меток, тактовый вход которого соединён с тактовым входом контроллера поддержания параметров секундной метки и выходом тактового генератора, вход прерывания контроллера поддержания параметров секундной метки соединён с выходом секундных меток приёмника GPS, а выход соединён с входом прерывания контроллера поддержания идентификации секундных меток и является выходом секундных меток формирователя, выходом идентификации секундных меток которого является выход контроллера поддержания идентификации секундных меток, вход идентификации секундных меток которого соединён с выходом блока согласования логических уровней, причём контроллер поддержания параметров секундной метки имеет программу, заключённую в нём, обеспечивающую измерение периода сигналов секундных меток при их наличии на входе прерывания этого контроллера, запоминание периода сигналов секундных меток во внутренней памяти этого контроллера и воспроизведение этих сигналов на выходе контроллера поддержания параметров секундной метки при прекращении поступления сигналов секундных меток от приёмника GPS, а контроллер поддержания идентификации секундных меток имеет программу, заключённую в нём, обеспечивающую приём сообщений о времени текущей секундной метки при наличии секундных меток от приёмника GPS, расчёт времени секундной метки при прекращении секундных меток от приёмника GPS и выдачу идентификационной информации о текущей секундной метке на выходе этого контроллера в формате протокольного сообщения приёмника GPS.
| АВТОНОМНЫЙ ЦИФРОВОЙ СЕЙСМОМЕТР | 2010 |
|
RU2435175C1 |
| АВТОНОМНЫЙ РЕГИСТРАТОР СЕЙСМИЧЕСКИХ СИГНАЛОВ | 2007 |
|
RU2331087C1 |
| АВТОНОМНЫЙ ЦИФРОВОЙ СЕЙСМОМЕТР | 2010 |
|
RU2434249C1 |
| АВТОНОМНЫЙ СЕЙСМОПРИЕМНИК С ЦИФРОВОЙ РЕГИСТРАЦИЕЙ СЕЙСМИЧЕСКИХ ДАННЫХ | 2009 |
|
RU2400777C1 |
| Колесо для лыжероллеров | 1979 |
|
SU967494A1 |
| US 7299133 B2, 20.11.2007 | |||
| СПОСОБ ВЫРАБОТКИ НЕКУРИТЕЛЬНОГО ИЗДЕЛИЯ ИЗ МАХОРКИ | 2011 |
|
RU2443248C1 |
