Изобретение относится к измерительной технике и информационным технологиям и может быть использовано в автоматизированных системах для выполнения комплексных математических операций с целью выделения сигналов движущихся целей на фоне пассивных помех с неизвестными корреляционными свойствами.
Известно радиолокационное устройство для обнаружения движущейся цели [патент Японии №63-49193, МПК G01S 13/52], содержащее последовательно включенные блоки задержки, перемножитель комплексных чисел и вычитатель. Однако это устройство обладает низкой эффективностью выделения сигнала движущейся цели.
Наиболее близкий к данному изобретению вычислитель для режекции помех [патент RU №2797653, МПК G06F 17/10], выбранный в качестве прототипа, содержит блоки задержки, комплексный сумматор, комплексный перемножитель и измеритель доплеровской фазы. Однако данное устройство имеет потери в эффективности компенсации помех.
Задачей, решаемой в изобретении, является повышение эффективности компенсации пассивной помехи и выделения сигналов движущихся целей при обработке сигналов от цели на фоне пассивных помех с априорно неизвестными корреляционными свойствами.
Для решения поставленной задачи в вычислитель-компенсатор помех, содержащий первый, второй и третий блоки задержки, комплексный сумматор, комплексный перемножитель, измеритель доплеровской фазы и синхрогенератор, введены вычислитель весового коэффициента и весовой блок, соединенные между собой определенным образом.
Сущность изобретения как технического решения характеризуется совокупностью существенных признаков, изложенных в формуле изобретения и обеспечивающих решение поставленной задачи путем адаптивной обработки поступающих импульсов.
Технический результат изобретения состоит в повышении эффективности компенсации пассивной помехи с априорно неизвестными корреляционными свойствами и выделения сигналов движущихся целей.
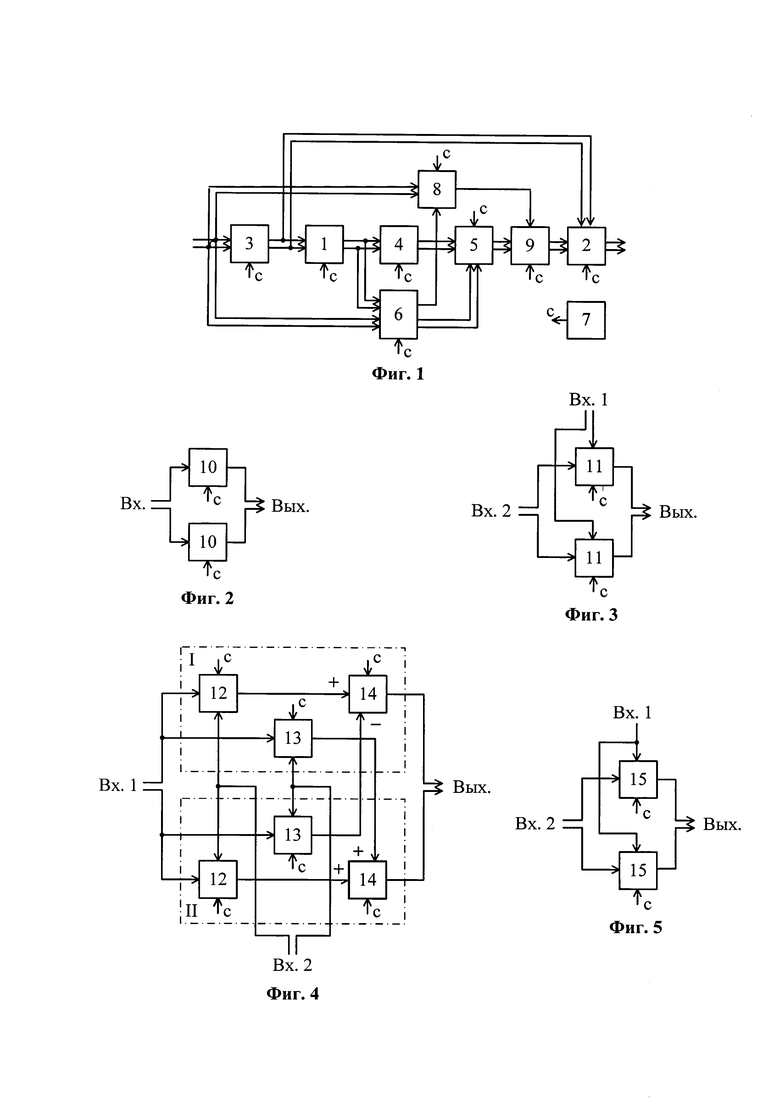
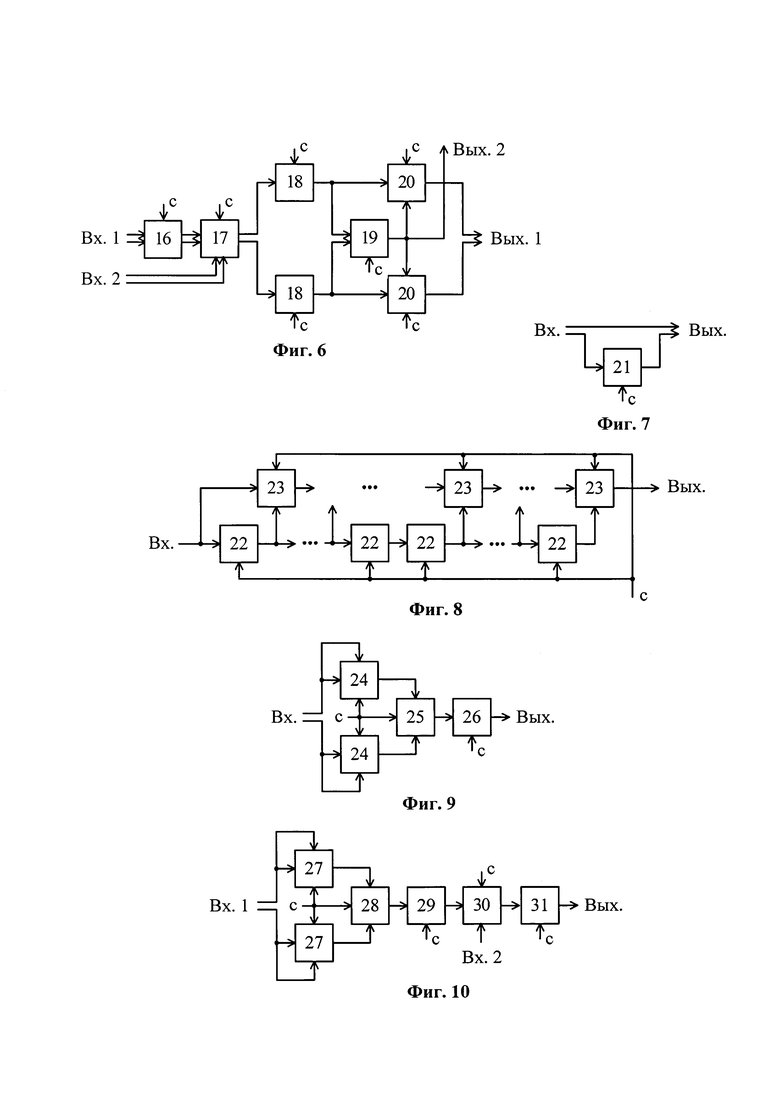
На фиг. 1 представлена структурная электрическая схема вычислителя-компенсатора помех; на фиг. 2 - блока задержки; на фиг. 3 - комплексного сумматора; на фиг. 4 - комплексного перемножителя; на фиг. 5 - весового блока; на фиг. 6 - измерителя доплеровской фазы; на фиг. 7 - блока комплексного сопряжения, на фиг. 8 - накопителя, на фиг. 9 - блока вычисления модуля; на фиг. 10 - вычислителя весового коэффициента.
Вычислитель-компенсатор помех (фиг. 1) содержит блоки 1, 3, 4 задержки, комплексный сумматор 2, первый комплексный перемножитель 5, измеритель 6 доплеровской фазы; синхрогенератор 7; вычислитель 8 весового коэффициента и весовой блок 9.
Блоки 1, 3, 4 задержки (фиг. 2) содержат две линии 10 задержки; комплексный сумматор 2 (фиг. 3) содержит два сумматора 11; первый и второй комплексные перемножители 5, 17 (фиг. 4) содержат два канала (I, II), каждый из которых содержит первый и второй перемножители 12, 13 и сумматор 14; весовой блок 9 (фиг. 5) содержит два перемножителя 15; измеритель 6 доплеровской фазы (фиг. 6) содержит блок 16 комплексного сопряжения, второй комплексный перемножитель 17 (фиг. 4), два накопителя 18, блок 19 вычисления модуля и два делителя 20; блок 16 комплексного сопряжения (фиг. 7) содержит инвертор знака 21; каждый накопитель 18 (фиг. 8) содержит n элементов 22 задержки на интервал tД и n сумматоров 23; блок 19 вычисления модуля (фиг. 9) содержит два квадратора 24, сумматор 25 и блок 26 извлечения квадратного корня; вычислитель 8 весового коэффициента (фиг. 10) содержит два квадратора 27, сумматор 28, накопитель 29 (фиг. 8), делитель 30 и инвертор знака 31.
Вычислитель-компенсатор помех может быть осуществлен следующим образом.
Поступающие на вход заявляемого устройства (фиг. 1) цифровые отсчеты (xkl,ykl) следуют через период повторения T и в каждом элементе разрешения по дальности (кольце дальности) каждого периода повторения образуют последовательность комплексных чисел

где k - номер текущего периода, l - номер текущего кольца дальности, ϕl - доплеровский сдвиг фазы за период повторения (доплеровская фаза), обычно помехи, ввиду ее значительного превышения над сигналом.
Цифровые отсчеты в заявляемом устройстве (фиг. 1) поступают на соединенные входы второго блока 3 задержки на интервал τ, вторые входы измерителя 6 доплеровской фазы и первые входы вычислителя 8 весового коэффициента. На первые входы измерителя 6 доплеровской фазы поступают отсчеты с выхода первого блока 1 задержки на интервал T-τ.Отсчеты на первых и вторых входах измерителя 6 доплеровской фазы разделены на интервал Т.
Отсчеты с выхода второго блока 3 задержки поступают на первые входы комплексного сумматора 2 и на входы первого блока 1 задержки, с выхода которого отсчеты поступают в каскадно соединенные третий блок 4 задержки, первый комплексный перемножитель 5, весовой блок 9 и комплексный сумматор 2, выходы которого являются выходами заявляемого устройства.
В инверторе знака 21 (фиг. 7) блока 16 комплексного сопряжения измерителя 6 (фиг. 6) происходит инвертирование знака мнимых проекций задержанных отсчетов. Во втором комплексном перемножителе 17 происходит перемножение комплексных чисел, реализуемое путем операций с проекциями этих чисел в соответствии с фиг. 4 и приводящее к образованию величин

В накопителях 18 (фиг. 6) с помощью элементов 22 задержки и сумматоров 23 (фиг. 8) осуществляется скользящее вдоль дальности в каждом периоде повторения суммирование проекций ReXklи ImXkl с n+1 смежных элементов разрешения по дальности временного строба, кроме элемента с номером n/2+1, для чего выходные величины элемента 22 задержки с номером n/2 поступают только на последующий элемент 22 задержки (фиг. 8). В результате накопления образуются величины

где  - оценка доплеровского сдвига фазы помехи за период повторения Т, усредненная по n смежным элементам разрешения по дальности.
- оценка доплеровского сдвига фазы помехи за период повторения Т, усредненная по n смежным элементам разрешения по дальности.
В блоке 19 вычисления модуля (фиг. 9) определяются величины
 а затем на выходах делителей 20 (фиг. 6) - величины
а затем на выходах делителей 20 (фиг. 6) - величины  поступающие на вторые входы первого комплексного перемножителя 5. Накопление n отсчетов обеспечивает высокоточное измерение величины
поступающие на вторые входы первого комплексного перемножителя 5. Накопление n отсчетов обеспечивает высокоточное измерение величины 
С помощью квадраторов 27, сумматора 28, накопителя 29 и делителя 30 (фиг. 10) по величине | Yk |, поступающей от измерителя 6 доплеровской фазы, и по входным отсчетам Ukl определяется оценка коэффициента корреляции помехи  по которой в инверторе знака 31 находится весовой коэффициент
по которой в инверторе знака 31 находится весовой коэффициент

Первый блок 1 задержки на интервал Т - τ совместно с третьим блоком 4 задержки на интервал τ образуют результирующую задержку на интервал Т. В результате на входы комплексного сумматора 2 отсчеты поступают синхронно. С учетом комплексного перемножения с величиной  и взвешивания задержанных отсчетов весовым коэффициентом a от вычислителя 8 в весовом блоке 9 в результате синфазных суммирований в комплексном сумматоре 2 на его выходе вычисляются отсчеты остатков помехи
и взвешивания задержанных отсчетов весовым коэффициентом a от вычислителя 8 в весовом блоке 9 в результате синфазных суммирований в комплексном сумматоре 2 на его выходе вычисляются отсчеты остатков помехи

Двумерный поворот задержанных отсчетов в первом комплексном перемножителе 5 на угол обеспечивает необходимую для компенсации помехи синфазность суммируемых отсчетов. Взвешивание весовым коэффициентом  в блоке 9 учитывает корреляционные свойства помехи, повышающие эффективность ее режектирования. Отсчеты сигнала от движущейся цели из-за сохранения доплеровских сдвигов фазы не подавляются.
в блоке 9 учитывает корреляционные свойства помехи, повышающие эффективность ее режектирования. Отсчеты сигнала от движущейся цели из-за сохранения доплеровских сдвигов фазы не подавляются.
Введение второго блока 3 задержки на интервал τ обеспечивает соответствие оценок  и
и  среднему элементу обучающей выборки, исключенному в накопителях 18 (фиг. 8). Величина τ определяется выражением
среднему элементу обучающей выборки, исключенному в накопителях 18 (фиг. 8). Величина τ определяется выражением

где tB - время вычисления оценок  и n - количество элементов обучающей выборки, tД - интервал (период) временной дискретизации.
и n - количество элементов обучающей выборки, tД - интервал (период) временной дискретизации.
При этом исключается возможность ослабления или подавления сигнала за счет его влияния на используемые оценки. Кроме того, уменьшаются ошибки за счет рассогласования между оцениваемыми и действительными величинами доплеровской фазы и коэффициента корреляции помехи.
Синхронизация вычислителя-компенсатора помех осуществляется подачей на все блоки заявляемого устройства последовательности синхронизирующих импульсов от синхрогенератора 7 (фиг. 1).
Достигаемый технический результат состоит в повышении эффективности компенсации пассивной помехи с априорно неизвестными корреляционными свойствами и выделения сигналов движущихся целей, что достигается адаптацией к параметрам помехи и уменьшением рассогласования между оцениваемыми и действительными величинами параметров помехи.
Таким образом, вычислитель-компенсатор помех позволяет повысить эффективность подавления пассивной помехи и выделения сигналов движущихся целей на фоне пассивных помех с априорно неизвестными корреляционными свойствами.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЫЧИСЛИТЕЛЬ-КОМПЕНСАТОР ПАССИВНЫХ ПОМЕХ | 2023 |
|
RU2814973C1 |
| ВЫЧИСЛИТЕЛЬ ДЛЯ РЕЖЕКТИРОВАНИЯ ПОМЕХ | 2024 |
|
RU2835120C1 |
| РЕЖЕКТОРНЫЙ ФИЛЬТР | 2024 |
|
RU2825253C1 |
| ВЫЧИСЛИТЕЛЬ-ПОДАВИТЕЛЬ ПОМЕХ | 2024 |
|
RU2835118C1 |
| ФИЛЬТР ПОДАВЛЕНИЯ ПОМЕХ | 2024 |
|
RU2835058C1 |
| ФИЛЬТР КОМПЕНСАЦИИ ПОМЕХ | 2024 |
|
RU2834699C1 |
| ВЫЧИСЛИТЕЛЬ-РЕЖЕКТОР ПОМЕХ | 2024 |
|
RU2831755C1 |
| ВЫЧИСЛИТЕЛЬ РЕЖЕКЦИИ ПОМЕХ | 2024 |
|
RU2834767C1 |
| ВЫЧИСЛИТЕЛЬ ДЛЯ КОМПЕНСАЦИИ ПОМЕХ | 2024 |
|
RU2836219C1 |
| ВЫЧИСЛИТЕЛЬ ДЛЯ ПОДАВЛЕНИЯ ПОМЕХ | 2024 |
|
RU2840116C1 |
Изобретение относится к измерительной технике и информационным технологиям и может быть использовано в автоматизированных системах для выполнения комплексных математических операций с целью выделения сигналов движущихся целей на фоне пассивных помех с неизвестными корреляционными свойствами. Вычислитель-компенсатор помех содержит первый, второй и третий блоки задержки, комплексный сумматор, комплексный перемножитель, измеритель доплеровской фазы, синхрогенератор, вычислитель весового коэффициента и весовой блок, определенным образом соединенные между собой и осуществляющие адаптивную когерентную обработку исходных цифровых отсчетов. Технический результат изобретения состоит в повышении эффективности компенсации пассивной помехи и выделения сигналов движущихся целей на фоне пассивных помех с априорно неизвестными корреляционными свойствами. 10 ил.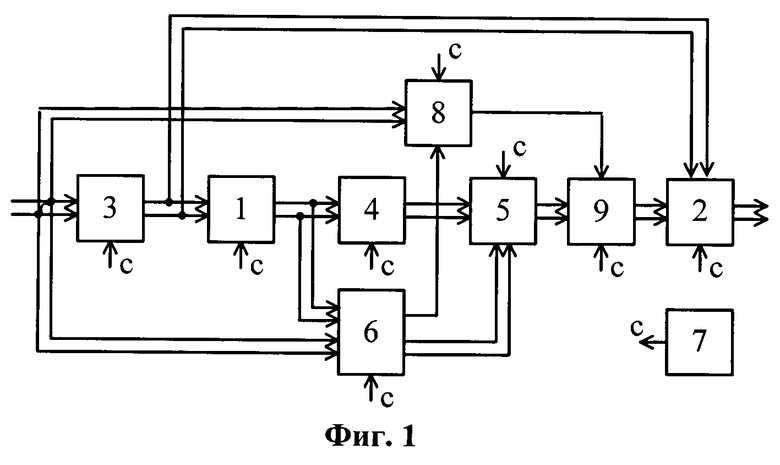
Вычислитель-компенсатор помех, содержащий первый блок задержки, комплексный сумматор, второй блок задержки, третий блок задержки, первый комплексный перемножитель, измеритель доплеровской фазы и синхрогенератор, при этом входы первого блока задержки соединены с первыми входами комплексного сумматора, входы второго блока задержки соединены с вторыми входами измерителя доплеровской фазы, выходы второго блока задержки соединены с входами первого блока задержки, выходы которого соединены с входами третьего блока задержки и первыми входами измерителя доплеровской фазы, первые выходы которого соединены с вторыми входами первого комплексного перемножителя, выходы третьего блока задержки соединены с первыми входами первого комплексного перемножителя, выход синхрогенератора соединен с синхровходами первого блока задержки, комплексного сумматора, второго блока задержки, третьего блока задержки, первого комплексного перемножителя и измерителя доплеровской фазы, отличающийся тем, что введены вычислитель весового коэффициента и весовой блок, при этом входы второго блока задержки соединены с первыми входами вычислителя весового коэффициента, второй выход измерителя доплеровской фазы соединен с вторым входом вычислителя весового коэффициента, выход которого соединен с первым входом весового блока, выходы первого комплексного перемножителя соединены с вторыми входами весового блока, выходы которого соединены с вторыми входами комплексного сумматора, выход синхрогенератора соединен с синхровходами вычислителя весового коэффициента и весового блока, причем входами вычислителя-компенсатора помех являются входы второго блока задержки, а выходами - выходы комплексного сумматора.
| ВЫЧИСЛИТЕЛЬ ДЛЯ РЕЖЕКЦИИ ПОМЕХ | 2022 |
|
RU2797653C1 |
| ВЫЧИСЛИТЕЛЬ ДЛЯ РЕЖЕКЦИИ ПОМЕХ | 2016 |
|
RU2634191C1 |
| РЕЖЕКТОРНЫЙ ФИЛЬТР | 2021 |
|
RU2759150C1 |
| 0 |
|
SU184344A1 |

