Изобретение относится к оборонной технике, а именно к управляемым ракетам, и может использоваться в комплексах вооружения для наведения ракет на наземные и надводные цели.
В настоящее время в нашей стране и за рубежом придается большое значение управляемым ракетам с пассивными головками самонаведения (ГСН) в инфракрасном (ИК) диапазоне длин волн. Например, управляемая ракета Trigat-LR (Германия, Франция), управляемая ракета Javelin (США), управляемые ракеты семейства NT-G, NT-S, NT-D (Израиль). Пассивные ИК ГСН осуществляют автономный поиск, распознавание и сопровождение целей по их тепловому излучению, что позволяет вести стрельбу ракетами по принципу "выстрелил и забыл". Этот принцип обеспечивает высокую выживаемость комплекса вооружения в силу скрытности применения оружия и возможности вести стрельбу с закрытых позиций или совершить немедленный маневр после выстрела.
Аналогом заявляемому устройству служит ГСН ракеты Javelin [1], которая содержит мозаичную матрицу 64х64 чувствительных элементов (диапазон волн 8-12 мкм), размещенную в фокальной плоскости объектива. Ракета в полете стабилизирована по крену. Изображение фоноцелевой обстановки (ФЦО) с каждого элемента матрицы после аналого-цифрового преобразования, запоминания и обработки по определенным алгоритмам в вычислителе идентифицируется с заранее введенными до пуска ракеты признаками цели (геометрическими размерами, тепловым контрастом относительно фона и др.). Ориентация матрицы на цель осуществляется следящим гироскопическим координатором. После захвата цели ГСН и определения ее координат вырабатывается сигнал управления ракетой, пропорциональный отклонению ракеты относительно цели.
Каждый элемент матрицы в такой ГСН воспринимает информацию независимо от других элементов и его отчетный сигнал должен быть пронумерован в системе координат цели. Это усложняет приемное устройство, т.к. мозаичная матрица технологически сложна в изготовлении. Кроме того, указанная ГСН усложняет ракету из-за необходимости стабилизации ее по крену, что требует применения рулевого привода с управлением не только по каналам курса и тангажа, а также по каналу крена.
В качестве прототипа заявляемому устройству служит пассивная ИК ГСН ракеты Trigat-LR (ATGW-3 /LR) [2,3]. Эта ГСН содержит линейную матрицу чувствительных (диапазон волн 8-12 мкм) элементов (32х2), установленную на гироскопическом координаторе в фокальной плоскости зеркально-линзовой системы. Ориентация матрицы по курсу и тангажу относительно системы координат цели осуществляется следящим гироскопическим координатором. Ракета Trigat-LR в полете стабилизирована по крену. Просмотр ФЦО матрицей обеспечивается сканированием зеркала в поле зрения ГСН, причем направление сканирования перпендикулярно продольной длине матрицы.
Изображение ФЦО, снимаемое с матрицы электронным коммутатором за кадр развертки, после аналого-цифрового преобразования и запоминания обрабатывается в вычислителе по определенным алгоритмам. Захват и сопровождение цели ГСН происходит до пуска ракеты или на траектории полета. Алгоритмы обеспечивают обработку, необходимую для корреляции изображения в ГСН с изображением цели в тепловизионном прицеле комплекса или заранее введенными признаками цели до пуска.
Основными недостатками прототипа являются:
- сложность приемной системы ГСН, вызванная наличием оптико-механического блока сканирования поля обзора;
- невозможность применения ГСН на вращающейся по крену ракете. Применение только на стабилизированной по крену ракете усложняет ее конструкцию наличием канала управления по крену.
Задачей предлагаемого изобретения является создание ИК ГСН для вращающейся по крену ракеты, позволяющей упростить конструкцию ракеты при одновременном упрощении конструкции ГСН.
Решение данной задачи достигается за счет того, что в ИК ГСН вращающейся по крену ракеты, содержащую объектив, оптически связанный с последовательно соединенными охлаждаемой линейной матрицей фоточувствительных элементов, электронным коммутатором, аналого-цифровым преобразователем, оперативным запоминающим устройством, селектором цели и усилителем, выход которого соединен с датчиками моментов трехстепенного корректируемого гироскопа и со входом аппаратуры управления ракетой, вводятся последовательно соединенные переключатель элементов матрицы и преобразователь координат элементов матрицы из полярной в декартову систему координат, при этом выход переключателя соединен также со вторым входом коммутатора, второй вход преобразователя координат соединен с выходом датчика угла крена ракеты, а выход соединен со вторыми входами оперативного запоминающего устройства и селектора цели, причем объектив и матрица установлены на внутренней рамке карданного подвеса гироскопа и матрица имеет продольный размер, равный диаметру поля зрения объектива в фокальной плоскости.
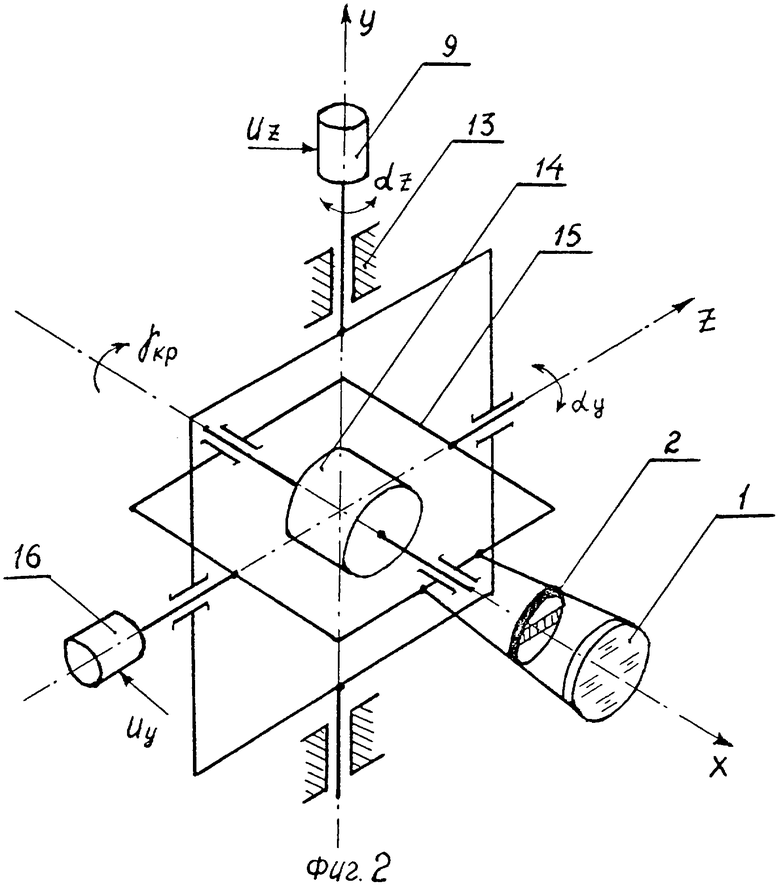
На фиг.1 представлена блок-схема предлагаемой ГСН, на фиг.2 представлен эскиз размещения матрицы на корректируемом гироскопе, где 1 - объектив, 2 - матрица, 3 - электронный коммутатор, 4 - аналого-цифровой преобразователь АЦП, 5 - преобразователь координат элементов матрицы из полярной в декартову систему координат, 6 - оперативное запоминающее устройство (ОЗУ), 7 - селектор цели, 8 - усилитель, 9 и 16 - датчики моментов каналов курса и тангажа соответственно, 10 - корректируемый гироскоп, 11 - переключатель элементов матрицы, 12 - датчик угла крена ракеты, 13 - корпус ракеты, 14 - вращающийся ротор гироскопа, 15 - внутренняя рамка карданного подвеса, 17 - аппаратура управления ракетой.
Предлагаемое устройство работает следующим образом. Обзор ФЦО в поле зрения объектива 1 осуществляется посредством радиально-кругового сканирования линейной матрицы 2, высокочувствительной в ИК области спектра. Такое сканирование обеспечивается за счет установки объектива и матрицы на внутренней рамке карданного подвеса 15 корректируемого гироскопа, что обеспечивает передачу вращения ракеты по крену на матрицу. Продольный размер матрицы равен диаметру поля зрения объектива в фокальной плоскости изображения.
Сигналы теплового излучения цели и фона с каждого элемента матрицы последовательно (с первого номера до последнего) с помощью коммутатора 3 передаются в аналого-цифровой преобразователь 4. Сцена изображения ФЦО представляется в полярной системе координат. Последовательность и необходимая частота съема информации с элементов матрицы в АЦП обеспечивается через коммутатор по сигналам с переключателя элементов матрицы 11, поступающим на второй вход коммутатора. Одновременно сигнал с переключателя поступает в преобразователь координат (положения) элементов матрицы из полярной в декартову систему координат 5. При этом производится преобразование координат элемента того же номера, с которого ведется съем информации. Переключатель элементов матрицы 11 может быть выполнен, например, в виде задающего генератора и счетчика.
Преобразование координат каждого элемента матрицы из полярной в декартову (земную) систему координат для управления ракетой по курсу и тангажу осуществляется в преобразователе 5 по известным формулам с использованием радиуса вращения элемента и тригонометрических функций sinγ и cosγ текущего угла крена γ ракеты, измеренные значения которого поступают на второй вход преобразователя с датчика угла крена ракеты 12.
Информация с каждого элемента матрицы после преобразования в АЦП в цифровой форме поступает на первый вход ОЗУ, на второй вход которого поступают сигналы о координатах этого же элемента в декартовой системе координат. В ОЗУ происходит запись информации о ФЦО с каждого элемента в прямоугольную матрицу, в которой координаты каждого элемента соответствуют декартовой системе координат. Обновление информации в ОЗУ происходит через каждые пол-оборота ракеты по крену.
Сцена изображения ФЦО с ОЗУ в декартовой системе координат передается в селектор цели 7.
В селекторе цели по определенным алгоритмам осуществляется захват и сопровождение цели по характерным признакам теплового излучения цели и фона и происходит сравнение этих признаков с заранее введенными признаками цели до пуска ракеты. Селектор цели и алгоритм захвата и слежения за целью могут быть выполнены, например, в соответствии с приведенными в [4].
С выхода селектора цели сигналы, пропорциональные угловому рассогласованию цели по курсу Uy и тангажу UZ относительно оптической оси объектива, после усилителя 8 поступают соответственно на датчики моментов 16 и 9. Датчики создают коррекционные моменты, которые вызывают вынужденную прецессию гироскопа (внутренней рамки), что обеспечивает совмещение оптической оси объектива и центра матрицы с направлением на цель. Одновременно сигналы рассогласования поступают в аппаратуру управления ракетой 17, в соответствии с которыми она наводится на цель. Корректируемый гироскоп обеспечивает также стабилизацию матрицы при колебаниях ракеты по углам атаки и скольжения. Разгон ротора 14 гироскопа до старта осуществляется, например, пружинным движителем.
Заявляемая ИК ГСН по сравнению с известными обладает следующими преимуществами:
- обеспечивается применение на вращающейся по крену ракете, что упрощает конструкцию ракеты, т.к. не требуется ее стабилизации по крену;
- имеет простую конструкцию благодаря исключению из ее состава сложной оптико-механической системы сканирования. В заявляемой ГСН используется радиально-круговое сканирование линейной матрицы за счет вращения ракеты по крену в полете.
Заявляемое устройство проверено с большой эффективностью в комплексе высокоточного управляемого вооружения "Гермес".
Источники информации
1. ORS, Issul Brief, September 17, 1997, p. 3-5.
2. Jane's Defence Weekly, 1998, v 29, 16, р. 3.
3. Military Technology, 1996, Special Ilusse, p. 16-17.
4. Зарубежная радиоэлектроника, 10, 1987, стр.57-67.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОПТИЧЕСКАЯ ПОЛЯРИЗАЦИОННАЯ ГОЛОВКА САМОНАВЕДЕНИЯ С ОДНОЭЛЕМЕНТНЫМ ИНФРАКРАСНЫМ ПРИЕМНИКОМ ИЗЛУЧЕНИЯ | 2023 |
|
RU2825219C1 |
| Способ самонаведения на цель ракеты, оснащенной головкой самонаведения и вращающейся вокруг своей продольной оси | 2023 |
|
RU2820042C1 |
| ГИРОСКОПИЧЕСКОЕ СЛЕДЯЩЕЕ ЗА ЦЕЛЬЮ УСТРОЙСТВО САМОНАВОДЯЩЕЙСЯ ВРАЩАЮЩЕЙСЯ ВОКРУГ ПРОДОЛЬНОЙ ОСИ РАКЕТЫ | 2009 |
|
RU2397435C1 |
| СПОСОБ ФОРМИРОВАНИЯ КОМАНД УПРАВЛЕНИЯ РАКЕТОЙ, ВРАЩАЮЩЕЙСЯ ПО УГЛУ КРЕНА, И РАКЕТА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2242698C2 |
| ТЕПЛОВАЯ ГОЛОВКА САМОНАВЕДЕНИЯ РАКЕТЫ, НЕЧУВСТВИТЕЛЬНАЯ К ГЕНЕРАТОРАМ ИНФРАКРАСНЫХ ПУЛЬСИРУЮЩИХ ПОМЕХ | 2010 |
|
RU2419060C2 |
| СПОСОБ КОРРЕКЦИИ КОМАНДНОГО СИГНАЛА НА РАКЕТЕ, ВРАЩАЮЩЕЙСЯ ПО УГЛУ КРЕНА, И СИСТЕМА НАВЕДЕНИЯ РАКЕТЫ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2257523C1 |
| КОРАБЕЛЬНЫЙ КОМПЛЕКС ВЫСОКОТОЧНОГО ОРУЖИЯ БЛИЖНЕГО РУБЕЖА | 1998 |
|
RU2135391C1 |
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕОРИЕНТИРУЕМОЙ В ЛУЧЕ РАКЕТЫ И РАКЕТНЫЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2266509C1 |
| СПОСОБ ВВОДА В ЗОНУ УПРАВЛЕНИЯ РАКЕТЫ, ВРАЩАЮЩЕЙСЯ ПО УГЛУ КРЕНА, И РАКЕТНЫЙ КОМПЛЕКС | 2007 |
|
RU2362107C2 |
| СПОСОБ УПРАВЛЕНИЯ СТАРТОМ РАКЕТЫ И РАКЕТНЫЙ КОМПЛЕКС | 2005 |
|
RU2291382C1 |
Изобретение относится к оборонной технике, а именно к управляемым ракетам, и может использоваться в комплексах вооружения для наведения ракет на наземные и надводные цели. Технический результат - упрощение конструкции ракеты при одновременном упрощении конструкции головки самонаведения. Решение данной задачи достигается за счет того, что в инфракрасную головку самонаведения, содержащую объектив, оптически связанный с последовательно соединенными линейной матрицей фоточувствительных элементов, электронным коммутатором, аналого-цифровым преобразователем, оперативным запоминающим устройством, селектором цели и усилителем, выход которого соединен с датчиком моментов трехстепенного корректируемого гироскопа и со входами аппаратуры управления ракеты, вводятся последовательно соединенные переключатель элементов матрицы и преобразователь координат элементов матрицы из полярной в декартову систему координат. При этом выход переключателя соединен также со вторым входом коммутатора, второй вход преобразователя координат соединен с выходом датчика угла крена ракеты, а выход соединен со вторыми входами оперативного запоминающего устройства и селектора цели, причем объектив и матрица установлены на внутренней рамке карданного подвеса гироскопа и матрица имеет продольный размер, равный диаметру поля зрения объектива в фокальной плоскости. 2 ил.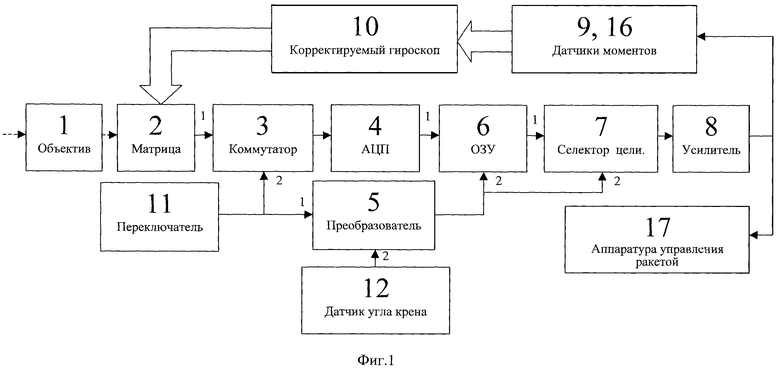
Пассивная инфракрасная головка самонаведения вращающейся ракеты, содержащая объектив, оптически связанный с последовательно соединенными охлаждаемой линейной матрицей фоточувствительных элементов, электронным коммутатором, аналого-цифровым преобразователем, оперативным запоминающим устройством, селектором цели и усилителем, выход которого соединен с датчиками моментов трехстепенного корректируемого гироскопа и со входом аппаратуры управления ракетой, отличающаяся тем, что в нее введены последовательно соединенные переключатель элементов матрицы и преобразователь координат элементов матрицы из полярной в декартову систему координат, при этом выход переключателя соединен также со вторым входом электронного коммутатора, второй вход преобразователя координат соединен с выходом датчика угла крена ракеты, а выход соединен со вторыми входами оперативного запоминающего устройства и селектора цели, причем объектив и матрица установлены на внутренней рамке карданного подвеса гироскопа и матрица имеет продольный размер, равный диаметру поля зрения объектива в фокальной плоскости.
| TRIGAT IS HERE, Military Technology, 1996, №3, с.58-64 | |||
| US 4561611, 31.12.1985 | |||
| RU 2059961 С1, 10.05.1996 | |||
| КЛЕЕВАЯ КОМПОЗИЦИЯ | 2013 |
|
RU2531202C1 |
