Изобретение относится к системам измерения и индикации, обеспечивающим пилотирование летательных аппаратов в случае отказа основных пилотажно-навигационных систем.
Известна система [1] комбинированных резервных приборов для самолетов и вертолетов, выполненная в виде отдельного блока, содержащая датчики полного и статического давлений, устройство обработки и преобразования сигналов, вычислитель, модуль пространственной ориентации, ЖК экран с органом управления, устройство управления режимами работы, устройство ввода-вывода, соединенные с вычислителем.
Недостатком данной системы является отсутствие учета наклона приборной доски и возможности выбора угла наклона приборной доски, при использовании двухкабинных летательных аппаратов, что приводит к дополнительной настройке и юстировке системы.
Задачей, на решение которой направлено данное изобретение, является повышение надежности и технологичности за счет использования разовой команды выбора места установки и компенсации угла наклона приборной доски.
Поставленная задача решается за счет того, что в интегрированную систему резервных приборов, выполненную в виде отдельного блока, содержащую датчики полного и статического давления, соединенные через устройство обработки и преобразования сигналов с вычислителем, модуль пространственной ориентации, устройство управления режимами работы, жидкокристаллический индикатор, соединенные с вычислителем, креноскоп, фотодатчик, соединенный с устройством управления режимами работы, устройство компенсации систематической составляющей смещения нуля инерциальных датчиков модуля пространственной ориентации, подключенное своим входом к модулю пространственной ориентации, а выходом к вычислителю, встроенную систему контроля, подключенную своими входами к модулю пространственной ориентации, датчикам полного и статического давления, а выходом к вычислителю, согласно изобретению дополнительно введены устройство 12 разовых команд своим выходом подключенное ко входу введенного вновь устройства 13 выбора, выход которого подключен к введенному вновь модулю 14 компенсации угла наклона, выход которого подключен к шестому входу вычислителя.
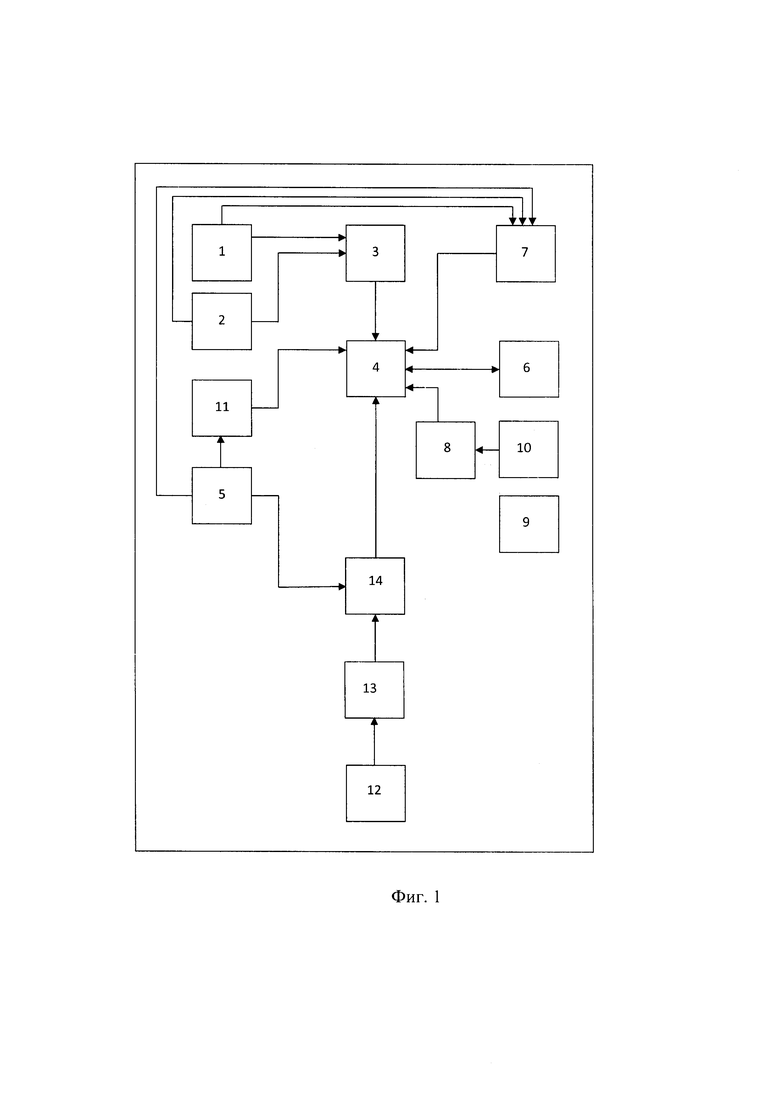
На фиг. 1 представлена схема системы, в которую входят датчик 1 полного давления, датчик 2 статического давления, устройство 3 обработки и преобразования сигналов, вычислитель 4, модуль 5 пространственной ориентации, ЖК индикатор 6, устройство 8 управления режимами работы, креноскоп 9, фотодатчик 10, устройство 11 компенсации систематической составляющей смещения нуля инерциальных датчиков модуля 5 пространственной ориентации, встроенная система 7 контроля, устройство 12 разовых команд, устройство 13 выбора, модуль 14 компенсации угла наклона.
В предложенной системе датчики 1 и 2 полного и статического давления подключены через устройство 3 обработки и преобразования сигналов к вычислителю 4. Устройство 8 управления режимами работы, ЖК индикатор 6 подключены также к вычислителю 4. Фотодатчик 10 соединен с устройством 8 управления режимами работы. Устройство 11 компенсации систематической составляющей смещения нуля инерциальных датчиков подключено своим входом к модулю 5 пространственной ориентации, а выходом к вычислителю 4. Встроенная система 7 контроля подключена своими входами к модулю 5 пространственной ориентации, к датчикам 1 и 2 полного и статического давления, а выходом к вычислителю 4. Креноскоп 9 работает автономно. Устройство 12 разовых команд своим выходом подключено к устройству 13 выбора, выход которого подключен ко входу модуля 14 компенсации угла наклона, выход которого подключен к седьмому входу вычислителя.
Резервная система ориентации работает следующим образом. В процессе полета сигналы от встроенных в систему датчиков 1 и 2 полного и статического давлений поступают в устройство 3 обработки и преобразования сигналов, которое обрабатывает эти сигналы, вычисляет полное Рп и статическое Рст давления, а также корректирует сигналы с датчиков 1 и 2 давлений в зависимости от температуры окружающей среды. Скорректированные сигналы давлений Рсх, Рп и сигнал Тп из устройства 3 обработки и преобразования сигналов поступают в вычислитель 4. С помощью датчиков угловых скоростей, датчиков линейных ускорений и электронных вычислительных средств, размещенных в модуле 5 пространственной ориентации, вычисляются основные параметры положения летательного аппарата: угол крена, угол тангажа, гироскопический курс. Данные о пространственном положении летательного аппарата передаются в вычислитель 4, который на основе полученных сигналов с блока устройства 3 обработки и преобразования сигналов вычисляет по известным зависимостям основные пилотажные параметры: приборную скорость Vпр, истинную скорость Vист, абсолютную высоту Набс, относительную высоту Нотн, вертикальную скорость Vв, температуру наружного воздуха Тст, число М.
Встроенная система 7 контроля предназначена для проведения тест-контроля модуля 5 пространственной ориентации, датчиков 1 и 2 полного и статического давления во время предполетной подготовки и в полете.
При контроле модуля 5 пространственной ориентации производится измерение потребляемых токов датчиков угловой скорости с последующим сравнением измеренного значения с ожидаемым значением. Контроль исправности датчиков линейного ускорения производится алгоритмически.
Креноскоп 9 позволяет пилоту контролировать величину скольжения летательного аппарата во время координированного разворота. При правильном координированном развороте скольжение должно отсутствовать.
Фотодатчик 9 расположен на лицевой панели прибора рядом с ЖК индикатором 6 и выдает информацию о величине внешней освещенности в устройство 7 управления режимами работы, которое через вычислитель 4 осуществляет автоматическую регулировку яркости ЖК индикатора 6. При увеличении внешней освещенности яркость ЖК индикатора 6 также увеличивается, а при снижении освещенности - снижается.
Устройство 10 компенсации систематической составляющей смещения нуля инерциальных датчиков модуля 5 пространственной ориентации позволяет повысить точность вычисления углов ориентации.
Устройство 12 разовых команд предназначено для обработки разовой команды II типа по ГОСТ 18977-79, поступающей на внешний разъем системы, устройство 13 выбора анализирует поступивший сигнал и формирует команду управления, которая поступает на модуль 14 формирования компенсации угла наклона, который проводит учет угла согласно поступившей команде и выдает показания датчиков модуля 5 пространственной ориентации с учетом угла наклона приборной доски на вычислитель 4. Вычислитель 4 по известным зависимостям вычисляет параметры ориентации и вместе с пилотажными параметрами передает на ЖК индикатор 6.
Определение места установки и компенсация угла наклона приборной доски повышает надежность летательного аппарата, а также исключает ошибку установки, дополнительную настройку и юстировку системы, при оперативной замене отказавшего блока.
Источники информации:
1. Патент РФ №2635821, МПК G01C 21/00 2017 г. прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНТЕГРИРОВАННАЯ СИСТЕМА РЕЗЕРВНЫХ ПРИБОРОВ | 2009 |
|
RU2386927C1 |
| Интегрированная система резервных приборов | 2019 |
|
RU2728731C1 |
| Интегрированная система резервных приборов | 2016 |
|
RU2635821C1 |
| Интегрированная система резервных приборов | 2016 |
|
RU2656954C1 |
| Интегрированная система резервных приборов | 2020 |
|
RU2790217C2 |
| Интегрированная система резервных приборов | 2018 |
|
RU2734278C2 |
| Интегрированная система резервных приборов | 2020 |
|
RU2780634C2 |
| Интегрированная система резервных приборов | 2019 |
|
RU2733326C1 |
| Интегрированная система резервных приборов | 2017 |
|
RU2690029C1 |
| ИНТЕГРИРОВАННАЯ СИСТЕМА РЕЗЕРВНЫХ ПРИБОРОВ И СПОСОБ КАЛИБРОВКИ ДАТЧИКА МАГНИТНОГО ПОЛЯ ИНТЕГРИРОВАННОЙ СИСТЕМЫ РЕЗЕРВНЫХ ПРИБОРОВ | 2015 |
|
RU2593424C1 |
Резервная система ориентации летательных аппаратов содержит датчик полного давления, датчик статического давления, устройство обработки и преобразования сигналов, вычислитель, модуль пространственной ориентации, жидкокристаллический индикатор, устройство управления режимами работы, креноскоп, фотодатчик, устройство компенсации систематической составляющей смещения нуля инерциальных датчиков модуля пространственной ориентации, встроенная система контроля, устройство разовых команд, устройство выбора, модуль компенсации угла наклона, соединенные определенным образом. Обеспечивается повышение надежности и технологичности за счет возможности выбора места установки и компенсации угла наклона приборной доски. 1 ил.
Резервная система ориентации, выполненная в виде отдельного блока, содержащая датчики полного и статического давления, соединенные через устройство обработки и преобразования сигналов с вычислителем, модуль пространственной ориентации, устройство управления режимами работы, жидкокристаллический индикатор, соединенные с вычислителем, креноскоп, фотодатчик, соединенный с устройством управления режимами работы, устройство компенсации систематической составляющей смещения нуля инерциальных датчиков, подключенное своим входом к модулю пространственной ориентации, а выходом - к вычислителю, встроенную систему контроля, подключенную своими входами к модулю пространственной ориентации, датчикам полного и статического давления, а выходом - к вычислителю, согласно изобретению дополнительно введены устройство разовых команд, вход которого подключен к введенному устройству выбора, выход которого подключен ко входу введенного модуля компенсации угла наклона, выход которого соединен с седьмым входом вычислителя.
| Интегрированная система резервных приборов | 2020 |
|
RU2780634C2 |
| Интегрированная система резервных приборов | 2019 |
|
RU2733326C1 |
| Интегрированная система резервных приборов | 2019 |
|
RU2728731C1 |
| Интегрированная система резервных приборов | 2016 |
|
RU2635821C1 |
| US 6564628 B1, 20.05.2003 | |||
| CN 205619938 U, 05.10.2016. | |||

