Изобретение относится к системам измерения и индикации, обеспечивающим пилотирование летательных аппаратов в случае отказа основных пилотажно-навигационных систем.
Известна система [1] комбинированных резервных приборов для самолетов и вертолетов, выполненная в виде отдельного блока, содержащая датчик полного давления, датчик статического давления, устройство обработки и преобразования сигналов, вычислитель, модуль пространственной ориентации, ЖК индикатор, датчик торможения, устройство управления режимами работы, креноскоп, фотодатчик, устройство компенсации систематической составляющей смещения нуля инерциальных датчиков модуля пространственной ориентации, измерительный резистор, встроенную систему контроля, стабилизатор тока, коммутатор, аналого-цифровой преобразователь, источник опорного напряжения.
Недостатком данной системы является то, что система не способна контролировать достоверность информации с датчика торможения.
Задачей, на решение которой направлено данное изобретение, является повышение безопасности пилотирования летательного аппарата и надежности системы.
Поставленная задача решается за счет того, что в интегрированную систему резервных приборов, выполненную в виде отдельного блока, содержащую датчики полного и статического давления, соединенные через устройство обработки и преобразования сигналов с вычислителем; модуль пространственной ориентации, устройство управления режимами работы, жидкокристаллический индикатор, соединенные с вычислителем; креноскоп, фотодатчик, соединенный с устройством управления режимами работы; устройство компенсации систематической составляющей смещения нуля инерциальных датчиков модуля пространственной ориентации, подключенное своим входом к модулю пространственной ориентации, а выходом - к вычислителю; встроенную систему контроля, подключенную своими входами к модулю пространственной ориентации, к датчикам полного и статического давления, а выходом - к вычислителю, стабилизатор тока, выход которого подключен к коммутатору и датчику торможения, выходы которого подключены к измерительному резистору и коммутатору, выход которого подключен к АЦП, на вход которого подается напряжение с источника опорного напряжения, дополнительно введено устройство контроля датчика торможения, подключенное входом - к АЦП, а выходом -к вычислителю.
Отличительной особенностью заявленной системы является введение устройства контроля датчика торможения. Представленная схема позволяет повысить безопасность пилотирования летательного аппарата и надежность системы, за счет контроля поступающей информации с датчика торможения и исключения выдачи и индикации ложной пилотажной информации, а именно истинной скорости объекта.
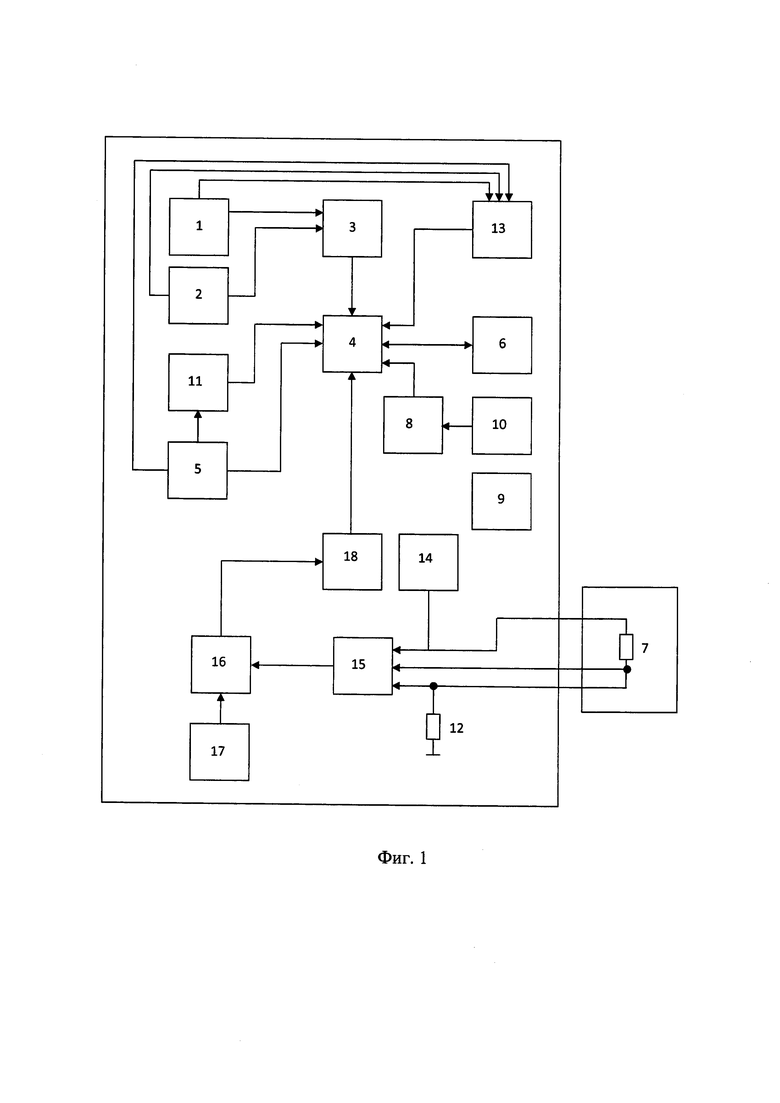
На фиг. 1 представлена схема системы, в которую входят датчик 1 полного давления, датчик 2 статического давления, устройство 3 обработки и преобразования сигналов, вычислитель 4, модуль 5 пространственной ориентации, ЖК индикатор 6, датчик торможения 7, устройство 8 управления режимами работы, креноскоп 9, фотодатчик 10, устройство 11 компенсации систематической составляющей смещения нуля инерциальных датчиков модуля 5 пространственной ориентации, измерительный резистор 12, встроенная система 13 контроля, стабилизатор тока 14, коммутатор 15, АЦП 16, источник 17 опорного напряжения, устройство 18 контроля датчика торможения.
Интегрированная система резервных приборов работает следующим образом. В процессе полета сигналы от встроенных в систему датчиков 1 и 2 полного и статического давлений поступают в устройство 3 обработки и преобразования сигналов УОПС, которое обрабатывает эти сигналы, вычисляет полное Рп и статическое Рст давления, а также корректирует сигналы с датчиков 1 и 2 давлений в зависимости от температуры окружающей среды. Скорректированные сигналы давлений (Рст, Рп) и сигнал Тп из УОПС 3 поступают в вычислитель 4. С помощью датчиков угловых скоростей, датчиков линейных ускорений и электронных вычислительных средств, размещенных в модуле 5 пространственной ориентации МПО, вычисляются основные параметры положения летательного аппарата (ЛА): угол крена, угол тангажа, гироскопический курс. Данные о пространственном положении ЛА передаются в вычислитель 4, который на основе полученных сигналов с блока УОПС 3 вычисляет по известным зависимостям основные пилотажные параметры: приборную скорость Vпр, истинную скорость V ист, абсолютную высоту Набс, относительную высоту Нотн, вертикальную скорость Vв, температуру наружного воздуха Тст, число М.
Встроенная система 13 контроля предназначена для проведения тест-контроля модуля пространственной ориентации 5, датчиков 1 и 2 полного и статического давления во время предполетной подготовки и в течение полета.
При контроле модуля пространственной ориентации 5 производится измерение потребляемых токов датчиков угловой скорости с последующим сравнением измеренного значения с ожидаемым. Контроль исправности датчиков линейного ускорения производится алгоритмически.
Креноскоп 9 позволяет пилоту контролировать величину скольжения летательного аппарата во время координированного разворота. При правильном координированном развороте скольжение должно отсутствовать.
Фотодатчик 10 расположен на лицевой панели прибора, рядом с ЖК индикатором 6 и выдает информацию о величине внешней освещенности, в устройство 8 управления режимами работы, которая через вычислитель 4 осуществляет автоматическую регулировку яркости ЖК индикатора 6. При увеличении внешней освещенности яркость ЖК индикатора 6 также увеличивается, а при снижении освещенности - снижается.
Устройство 11 компенсации систематической составляющей смещения нуля инерциальных датчиков модуля 5 пространственной ориентации позволяет повысить точность вычисления углов ориентации.
Информация с датчика 7 торможения, обрабатывается схемой съема, реализованной на стабилизаторе (14) тока, коммутаторе (15), измерительном резисторе (12), аналого-цифровом преобразователе (16) и источнике (17) опорного напряжения, и передается на устройство 18 контроля датчика торможения.
Устройство контроля датчика торможения 18 реализовано на микроконтроллере и обеспечивает допусковый контроль, по величинам, хранящимся в памяти микроконтроллера, определяемым на этапе регулировки и калибровки системы, результат контроля передается на вычислитель 4, который в случае выхода за допуски, снимает параметр истинной скорости с индикации на ЖК-индикаторе 6.
Источники информации
1. Патент РФ №2635821, МПК G01C 21/00 2017 г. прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНТЕГРИРОВАННАЯ СИСТЕМА РЕЗЕРВНЫХ ПРИБОРОВ | 2009 |
|
RU2386927C1 |
| Интегрированная система резервных приборов | 2020 |
|
RU2780634C2 |
| Интегрированная система резервных приборов | 2020 |
|
RU2790217C2 |
| Интегрированная система резервных приборов | 2019 |
|
RU2733326C1 |
| Интегрированная система резервных приборов | 2016 |
|
RU2635821C1 |
| Интегрированная система резервных приборов | 2017 |
|
RU2690029C1 |
| Интегрированная система резервных приборов | 2018 |
|
RU2734278C2 |
| Резервная система ориентации | 2023 |
|
RU2826174C1 |
| Интегрированная система резервных приборов | 2016 |
|
RU2656954C1 |
| ИНТЕГРИРОВАННАЯ СИСТЕМА РЕЗЕРВНЫХ ПРИБОРОВ ДЛЯ САМОЛЕТОВ И ВЕРТОЛЕТОВ | 2006 |
|
RU2337315C2 |
Изобретение относится к системам измерения и индикации, обеспечивающим пилотирование летательных аппаратов в случае отказа основных пилотажно-навигационных систем. Интегрированная система резервных приборов содержит датчик полного давления, датчик статического давления, устройство обработки и преобразования сигналов, вычислитель, модуль пространственной ориентации, ЖК индикатор, датчик торможения, устройство управления режимами работы, креноскоп, фотодатчик, устройство компенсации систематической составляющей смещения нуля инерциальных датчиков модуля пространственной ориентации, измерительный резистор, встроенную систему контроля, стабилизатор тока, коммутатор, АЦП, источник опорного напряжения, устройство контроля датчика торможения. Технический результат – повышение безопасности пилотирования летательного аппарата и надежности системы. 1 ил.
Интегрированная система резервных приборов, выполненная в виде отдельного блока, содержащая датчики полного и статического давления, соединенные через устройство обработки и преобразования сигналов с вычислителем; модуль пространственной ориентации, устройство управления режимами работы, жидкокристаллический индикатор, соединенные с вычислителем; креноскоп, фотодатчик, соединенный с устройством управления режимами работы; устройство компенсации систематической составляющей смещения нуля инерциальных датчиков модуля пространственной ориентации, подключенное своим входом к модулю пространственной ориентации, а выходом - к вычислителю; встроенную систему контроля, подключенную своими входами к модулю пространственной ориентации, к датчикам полного и статического давления, а выходом - к вычислителю, стабилизатор тока, выход которого подключен к коммутатору и датчику торможения, выходы которого подключены к измерительному резистору и коммутатору, выход которого подключен к АЦП, на вход которого подается напряжение с источника опорного напряжения, дополнительно введено устройство контроля датчика торможения, подключенное входом - к АЦП, а выходом - к вычислителю.
| Интегрированная система резервных приборов | 2016 |
|
RU2635821C1 |
| КОМПЛЕКС БОРТОВОГО ОБОРУДОВАНИЯ ВЕРТОЛЕТА | 2012 |
|
RU2520174C2 |
| ИНТЕГРИРОВАННАЯ СИСТЕМА РЕЗЕРВНЫХ ПРИБОРОВ ДЛЯ САМОЛЕТОВ И ВЕРТОЛЕТОВ | 2006 |
|
RU2337315C2 |
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |

