Изобретение относится к системам измерения и индикации, обеспечивающим пилотирование летательных аппаратов в случае отказа основных пилотажно-навигационных систем.
Известна система комбинированных резервных приборов для самолетов [1], которая выдает информацию о трех основных параметрах для пилота самолета в случае отказа основных приборов, а именно информацию о приборной скорости, которая вычисляется на основе измерения динамического давления, о барометрической высоте самолета, вычисляемой на основе измерения статического давления, и о пространственном положении самолета, вычисляемом на основе данных от автономных инерционных датчиков, размещенных в модуле пространственной ориентации. В нем также предусмотрена установка жидкокристаллического (ЖК) индикатора, на экране которого отображаются три основные параметра: высота, приборная скорость и пространственное положение самолета.
Недостатком данной системы является ограниченность выводимой на индикатор информации, необходимой для безопасности полета в случае выхода из строя основных пилотажно-навигационных систем, а также недостаточная точность измерения параметров пространственной ориентации.
Известна также интегрированная система резервных приборов для самолетов и вертолетов [2], выполненная в виде отдельного блока, содержащая датчики полного и статического давлений, соединенные со входом устройства обработки и преобразования сигналов, выход с вычислителем, модуль пространственной ориентации, магнитный зонд, ЖК экран с органом управления им, устройство управления режимами работы, устройство ввода-вывода, соединенные с вычислителем.
Недостатком данной системы является недостаточная надежность и точность измерения параметров пространственной ориентации.
Задачей, на решение которой направлено данное изобретение, является повышение надежности системы и точности измерения параметров пространственной ориентации.
Поставленная задача решается за счет того, что в интегрированную систему резервных приборов, выполненную в виде отдельного блока, содержащую датчики полного и статического давления, соединенные через устройство обработки и преобразования сигналов с вычислителем, модуль пространственной ориентации, устройство управления режимами работы, магнитный зонд, жидкокристаллический индикатор, соединенные с вычислителем, согласно изобретению, дополнительно введены креноскоп; фотодатчик, соединенный с устройством управления режимами работы; устройство компенсации систематической составляющей смещения нуля инерциальных датчиков модуля пространственной ориентации, подключенное своим входом к модулю пространственной ориентации, а выходом - к вычислителю; устройство списания девиационной погрешности с памятью, подключенное своим входом к магнитному зонду, а выходом - к вычислителю; встроенная система контроля, подключенная своими входами к магнитному зонду, к модулю пространственной ориентации, к датчикам полного и статического давления, а выходом - к вычислителю.
Отличительной особенностью заявленной системы является введение в нее креноскопа, который отображает информацию о наличии скольжения летательного аппарата.
Другой отличительной особенностью является введение фотодатчика, который регистрирует величину освещенности кабины летательного аппарата и в соответствии с этим выдает сигнал для изменения яркости ЖК индикатора, что увеличивает ресурс последнего.
Следующей отличительной особенностью является введение устройства компенсации смещения нуля, а также компенсации изменения нуля и крутизны инерциальных датчиков модуля пространственной ориентации, в состав которого входят инерциальные датчики (датчики угловых скоростей, акселерометры), датчики температуры, электронные устройства преобразования информации с датчиков.
Одновременно предложенное устройство позволяет компенсировать уходы смещения нуля и крутизны инерциальных датчиков от температуры окружающей среды, в которой происходит эксплуатация прибора.
Особенностью заявленной системы является введение в нее устройства списания девиационной погрешности магнитного зонда, которое осуществляет компенсацию погрешности, обусловленную паразитным магнитным полем, связанной с местонахождением магнитного зонда на летательном аппарате, что повышает точность системы.
Другой отличительной особенностью заявленной системы является введение в нее встроенной системы контроля, которая осуществляет тестирование входящих в систему узлов в процессе предстартовой подготовки к полету и в процессе полета, что повышает надежность работы резервной системы в целом.
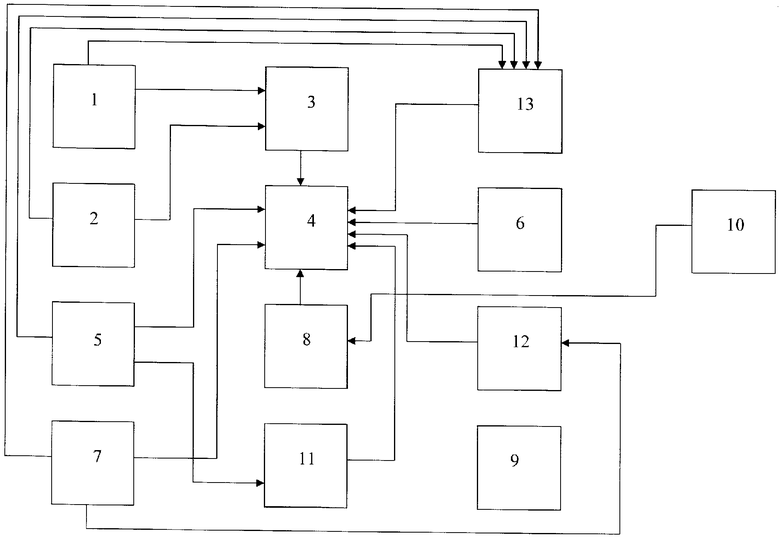
На чертеже представлена схема системы, в которую входят датчик 1 полного давления, датчик 2 статического давления, устройство 3 обработки и преобразования сигналов, вычислитель 4, модуль 5 пространственной ориентации, ЖК индикатор 6, магнитный зонд 7, устройство 8 управления режимами работы, креноскоп 9, фотодатчик 10, устройство 11 компенсации систематической составляющей смещения нуля инерциальных датчиков модуля 5 пространственной ориентации, устройство 12 списания девиационной погрешности с памятью, встроенная система 13 контроля.
В предложенной системе датчики 1 и 2 полного и статического давления подключены через устройство 3 обработки и преобразования сигналов к вычислителю 4. Модуль 5 пространственной ориентации, устройство 8 управления режимами работы, магнитный зонд 7, ЖК индикатор 6 подключены также к вычислителю 4. Фотодатчик 10 соединен с устройством 8 управления режимами работы. Устройство 11 компенсации систематической составляющей смещения нуля инерциальных датчиков модуля 5 пространственной ориентации подключено своим входом к модулю 5 пространственной ориентации, а выходом - к вычислителю 4, устройство 12 списания девиационной погрешности с памятью подключено своим входом к магнитному зонду, а выходом - к вычислителю 4. Встроенная система 13 контроля подключена своими входами к магнитному зонду 7, к модулю 5 пространственной ориентации, к датчикам 1 и 2 полного и статического давления, а выходом - к вычислителю 4. Креноскоп 9 работает автономно.
Электронные средства системы выполнены на основе современных элементов. Так, устройство обработки и преобразования сигналов - на основе АЦП1273ПВ1Р и микроконтроллера 1886ВЕ2У; устройство ввода-вывода - на основе ПЛИС 5576ХС1Т1.
Заявляемая резервная система работает следующим образом. В процессе полета сигналы от встроенных в систему датчиков 1 и 2 полного и статического давлений поступают в устройство 3 обработки и преобразования сигналов УОПС, которое обрабатывает эти сигналы, вычисляет полное Рп и статическое Рст давления, а также корректирует сигналы с датчиков 1 и 2 давлений в зависимости от температуры окружающей среды. Скорректированные сигналы давлений (Рст, Рп) и сигнал Тп из УОПС 3 поступают в вычислитель 4. С помощью датчиков угловых скоростей, датчиков линейных ускорений и электронных вычислительных средств, размещенных в модуле 5 пространственной ориентации МПО, вычисляются основные параметры положения летательного аппарата (ЛА): угол крена, угол тангажа, гироскопический курс. Данные о пространственном положении ЛА передаются в вычислитель 4, который на основе полученных сигналов с блока УОПС 3 вычисляет по известным зависимостям основные пилотажные параметры: приборную скорость Vпр, истинную скорость Vист, абсолютную высоту Набс, относительную высоту Нотн, вертикальную скорость Vв, температуру наружного воздуха Тст, число М.
Данные от спутниковой навигационной системы СНС, бортовой навигационной системы БИНС, бортового магнитного зонда 7, радиосредств поступают в вычислитель 4, который преобразует полученные сигналы в нужную форму и передает их в модуль 5 МПО, содержащий вычислительные средства, с помощью которых, в зависимости от приоритета, осуществляется корректировка пространственного положения ЛА с учетом полученных данных от СНС и бортовых систем. Сигналы скорректированных параметров пространственного положения из МПО 5 поступают в вычислитель 4, который преобразовывает полученные сигналы и сигналы вычисленных пилотажных параметров (Vпр, Vист, Набс, Нотн, Vв, Тст, число М) в форму, удобную для индикации, и выдает их на ЖК- индикатор 6.
Работа системы в части формирования гиромагнитного курса осуществляется по информации магнитного зонда 7, данные с которого поступают в вычислитель 4, где осуществляется процесс коррекции гироскопического курса, вычисленного по информации с датчиков угловой скорости модуля 5 пространственной ориентации. Затем вычисленная информация преобразуется в нужную форму и поступает на ЖК-индикатор 6. Сигналы СНС и БИНС используются в резервной системе для коррекции основных инерциальных параметров ЛА, вычисленных автономными датчиками угловых скоростей и датчиками линейных ускорений, размещенных в модуле 5 МПО. При этом преимущество в первую очередь отдается сигналам от работающей спутниковой навигационной системы СНС. При пропадании сигнала от СНС корректировка пилотажно-навигационных параметров резервной системы осуществляется по данным от БИНС. При выходе из строя обеих систем резервная система выдает автономно вычисленные пилотажно-навигационные параметры.
Резервная система работает в трех режимах:
- автономный режим,
- режим с коррекцией от СНС,
- режим с коррекцией от БИНС.
В автономном режиме система за счет внутренних средств осуществляет измерение, вычисление и индикацию приборной скорости, истинной скорости, барометрической высоты, вертикальной скорости, числа М, углов крена, тангажа, гиромагнитного курса.
В режиме с коррекцией от СНС система также осуществляет измерение, вычисление приборной скорости, истинной скорости, барометрической высоты, вертикальной скорости, числа М, углов крена, тангажа, истинного курса и проводит коррекцию инерциальных параметров с использованием данных от системы СНС, преобразовывает вычисленные и скорректированные параметры в нужную форму и индицирует их на экране ЖК-индикатора 6. Индицируемые скорректированные навигационные параметры имеют более высокую точность по сравнению с параметрами, вычисленными автономными датчиками. С использованием данных от СНС система дополнительно индицирует путевой угол, путевую скорость.
В режиме с коррекцией от БИНС система также осуществляет измерение, вычисление приборной скорости, истинной скорости, барометрической высоты, вертикальной скорости, числа М, углов крена, тангажа и проводит коррекцию инерциальных параметров с использованием данных от системы БИНС, преобразовывает вычисленные и скорректированные параметры в нужную форму и индицирует их на экране ЖК-индикатора 6.
Система имеет возможность взаимодействия с радиосистемой ближней и дальней навигации и осуществлять радионавигацию, при этом на экране ЖК-индикатора 6 индицируется:
- направление на маяки,
- дальность до маяков.
Система также имеет возможность взаимодействовать с приводными радиомаяками и осуществлять заход на посадку по глиссаде. Кроме того, система позволяет осуществлять пилотирование ЛА по заданному маршруту с использованием планируемых промежуточных пунктов маршрута ППМ. Встроенная система 13 контроля предназначена для проведения тест-контроля магнитного зонда 7, модуля 5 пространственной ориентации, датчиков 1 и 2 полного и статического давления во время предполетной подготовки и в течение полета.
При контроле магнитного зонда 7 на его вход задаются сигналы в виде постоянного напряжения определенной величины, вызывающие изменение выходных сигналов, величина которых сравнивается в вычислителе 4 с ожидаемым значением. Если эти значения входят в поле допусков, то делается вывод об исправности магнитных зондов 7, если не входят - то это свидетельствует об отказе.
При контроле модуля 4 пространственной ориентации производится измерение потребляемых токов датчиков угловой скорости с последующим сравнением измеренного значения с ожидаемым. Контроль исправности датчиков линейного ускорения производится алгоритмически.
В состав предложенной системы входит магнитный зонд 7, который выдает информацию о величине напряженности магнитного поля Земли по трем ортогональным осям. Недостатком данного измерения является наличие погрешностей или девиации, обусловленных искажением земного магнитного поля в области расположения магнитного зонда 7, из-за наличия там магнитомягкого и магнитотвердого железа или проводников с током.
Для списания девиационной погрешности дополнительно используется информация о магнитном курсе, выдаваемая основной прецизионной системой летательного аппарата, а также модуль горизонтальной и вертикальной составляющих магнитного поля Земли, измеренных в стационарных наземных условиях в точке проведения девиационных работ. Списание девиационной погрешности производится по определенному алгоритму, использующему данные, полученные в процессе девиационных работ и занесенных в память устройства.
В состав предложенной системы дополнительно введен креноскоп 9, который позволяет пилоту контролировать величину скольжения летательного аппарата во время координированного разворота. При правильном координированном развороте скольжение должно отсутствовать.
Фотодатчик 10 расположен на лицевой панели прибора, рядом с ЖК индикатором 6 и выдает информацию о величине внешней освещенности, в устройство 8 управления режимами работы, которая через вычислитель 4 осуществляет автоматическую регулировку яркости ЖК индикатора 6. При увеличении внешней освещенности яркость ЖК индикатора 6 также увеличивается, а при снижении освещенности - снижается.
Для повышения точности навигационных параметров предлагаемой системы в нее введено устройство 11 компенсации систематической составляющей смещения нуля инерциальных датчиков модуля 5 пространственной ориентации.
Для компенсации систематической составляющей нуля используется информация о величинах нулевых значений инерциальных датчиков-акселерометров и датчиков угловой скорости при наземном положении летательного аппарата, а также информация о величине температуры датчиков.
Как известно, температура окружающей среды влияет на показания инерциальных датчиков, поэтому можно снять номограмму зависимости величины выходного сигнала каждого датчика от температуры окружающей среды, записать эту зависимость в память вычислительного устройства, а затем вычитать из текущего значения в соответствии со значением температуры.
Система содержит встроенное программное обеспечение.
Резервная система выполнена в виде отдельного блока. На передней панели размещен ЖК-индикатор 6, на задней панели размещены датчики 1 и 2 полного и статического давлений. В средней части размещены модуль 5 пространственной ориентации, источник электропитания и вычислитель 4.
Источники информации
1. Патент США №6564628, МПК G01C 21/00, публ. 20.05.2003 г.
2. Патент РФ №2337315, МПК G01C 21/00 2008 г. (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Интегрированная система резервных приборов | 2018 |
|
RU2734278C2 |
| Интегрированная система резервных приборов | 2016 |
|
RU2656954C1 |
| ИНТЕГРИРОВАННАЯ СИСТЕМА РЕЗЕРВНЫХ ПРИБОРОВ И СПОСОБ КАЛИБРОВКИ ДАТЧИКА МАГНИТНОГО ПОЛЯ ИНТЕГРИРОВАННОЙ СИСТЕМЫ РЕЗЕРВНЫХ ПРИБОРОВ | 2015 |
|
RU2593424C1 |
| ИНТЕГРИРОВАННАЯ СИСТЕМА РЕЗЕРВНЫХ ПРИБОРОВ ДЛЯ САМОЛЕТОВ И ВЕРТОЛЕТОВ | 2006 |
|
RU2337315C2 |
| Интегрированная система резервных приборов | 2017 |
|
RU2690029C1 |
| Интегрированная система резервных приборов и способ индикации информации | 2018 |
|
RU2748304C2 |
| Интегрированная система резервных приборов | 2020 |
|
RU2780634C2 |
| Интегрированная система резервных приборов | 2019 |
|
RU2728731C1 |
| Интегрированная система резервных приборов | 2019 |
|
RU2733326C1 |
| Интегрированная система резервных приборов | 2020 |
|
RU2790217C2 |
Изобретение относится к области приборостроения и может найти применение в системах резервирования пилотажно-навигационных устройств. Технический результат - повышение надежности. Для достижения данного результата система содержит датчик полного давления, датчик статического давления, устройство обработки и преобразования сигналов, вычислитель, модуль пространственной ориентации, ЖК индикатор, магнитный зонд, устройство управления режимами работы, креноскоп, фотодатчик, устройство компенсации систематической составляющей смещения нуля инерциальных датчиков модуля пространственной ориентации, устройство списания девиационной погрешности с памятью и встроенную систему контроля. 1 ил.
Интегрированная система резервных приборов, выполненная в виде отдельного блока, содержащая датчики полного и статического давления, соединенные через устройство обработки и преобразования сигналов с вычислителем, модуль пространственной ориентации, устройство управления режимами работы, магнитный зонд, жидкокристаллический индикатор, соединенные с вычислителем, отличающаяся тем, что в нее дополнительно введены креноскоп, фотодатчик, соединенный с устройством управления режимами работы; устройство компенсации систематической составляющей смещения нуля инерциальных датчиков модуля пространственной ориентации, подключенное своим входом к модулю пространственной ориентации, а выходом - к вычислителю; устройство списания девиационной погрешности с памятью, подключенное своим входом к магнитному зонду, а выходом - к вычислителю; встроенная система контроля, подключенная своими входами к магнитному зонду, к модулю пространственной ориентации, к датчикам полного и статического давления, а выходом - к вычислителю.
| ИНТЕГРИРОВАННАЯ СИСТЕМА РЕЗЕРВНЫХ ПРИБОРОВ ДЛЯ САМОЛЕТОВ И ВЕРТОЛЕТОВ | 2006 |
|
RU2337315C2 |
| US 6564628 B1, 20.05.2003 | |||
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УГЛА ПОВОРОТА ЛЕТАТЕЛЬНОГО АППАРАТА И ИСТОЧНИК ПИТАНИЯ | 1997 |
|
RU2196302C2 |
| БРАСЛАВСКИЙ Д.А | |||
| и др | |||
| Авиационные приборы | |||
| - М.: Машиностроение, 1964, с.483-486 | |||
| WO 03069279 А2, 21.08.2003. | |||

