Изобретение относится к исполнительным устройствам приборов систем управления и предназначен для поворота управляемого звена на заданный угол, в соответствии с управляющим сигналом, а также удержании заданного положения и применяться авиации, в частности, в приводе аэродинамических рулей беспилотных летательных аппаратов (БПЛА), обеспечивая точное задание и удержание угловых положений органов управления.
Известен рулевой привод [1], содержащий двигатель, редуктор, включающий размещенную в его корпусе шариковинтовую передачу в виде ходового винта с ходовой гайкой и реечную зубчатую передачу движения с ходовой гайки на зубчатый сектор вала руля, при этом он снабжен компенсатором деформаций ходового винта, возникающих в зубчатой реечной передаче от воздействия радиальных сил при вращении руля, выполненным в виде подшипника качения, установленного на корпусе редуктора на стороне, противоположной зубчатому сектору, и взаимодействующего с боковой поверхностью ходовой гайки при ее перемещении вдоль ходового винта.
Недостатком данной конструкции многозвенность привода, сложность и высокая трудоемкость изготовления шариковинтовой передачи.
Известен электромеханический привод [2], состоящий из электродвигателя, двух цилиндрических зубчатых передач, выходного вала привода и датчика обратной связи, объединенных в едином корпусе, при этом электромеханический привод дополнен самотормозящей однозаходной червячной передачей, состоящей из находящихся в зацеплении червяка и червячного колеса, жестко закрепленного на выходном валу привода, причем червяк установлен на двух опорах качения, каждая из опор качения состоит из пары подшипников, одна из опор качения фиксируется в корпусе с использованием фиксирующей гайки и упорного кольца, а вторая опора качения выполнена с использованием регулирующей гайки и механического фиксатора, выходной вал привода смонтирован на двух подшипниках, закреплен в корпусе с использованием двух корончатых гаек: внешней и внутренней, и механических фиксаторов, выходной вал привода установлен в корпусе с использованием стандартной манжеты и резинового кольца особой формы, установленного в канавке между внешней гайкой и корпусом, две цилиндрические зубчатые передачи состоят из трибки, установленной на валу электродвигателя, промежуточного двухвенцового зубчатого колеса и зубчатого колеса, жестко закрепленного на червяке, причем промежуточное двухвенцовое зубчатое колесо находится в зацеплении с зубчатым колесом, закрепленным на червяке, и трибкой, датчик обратной связи соединен с выходным валом привода за счет плоской пружины, который наиболее близок предлагаемому техническому решению и выбран в качестве прототипа.
Недостаткам данной конструкции является высокая трудоемкость сборки, связанная с необходимостью множества регулировок для обеспечения точности сборки. Чтобы правильно выставить плоскость симметрии червячного колеса относительно червяка привод необходимо прикатать под нагрузкой, разобрать и определить положение пятна контакта. При смещении пятна контакта относительно плоскости симметрии червяка необходимо вновь повторить процедуру. Даже небольшие отклонения в настройках могут повлечь значительное снижение КПД привода. Регулировка осевого люфта червяка требует наличия технологической оснастки и измерительных приборов. Учитывая специфику условий эксплуатации подобных приводов (как правило, температурный диапазон эксплуатации от минус 60 до плюс 60 градусов Цельсия) любая неточность может привести либо к повышенному угловому люфту рулевого вала, либо к заклиниванию подшипников. Кроме того, датчики углового положения с механической измерительной системой обладают низкой точностью. Все это отражается на точности и скорости управления рулевым валом.
Техническим результатом изобретения является упрощение конструкции приводящей к снижению трудоемкости при сборке рулевого привода, при этом конструктивное решение позволяет повысить быстроту и точность позиционирования выходного вала привода.
Технический результат изобретения достигается тем, что червячная передача выполнена ортогональной, в виде эвольвентного червяка, находящегося в зацеплении с косозубой шестерней взаимодействующей с выходным валом привода, имеющую на одном конце выходную часть взаимодействующую с органами управления, задания и удержания угловых положений руля, а на другом конце, с торца закрепленный магнит бесконтактно воздействующий на бесконтактный магнитный датчик угла поворота, который закреплен на корпусе, при этом подшипники опор червяка смонтированы на червяке без возможности осевого смещения, образуя фиксированную и плавающую опоры, а выходной вал привода взаимодействует с подшипниками, косозубой шестерней, гайкой, которая воздействует и фиксирует подшипники и косозубую шестерню от осевого перемещения, причем один из подшипников взаимодействующий с корпусом фиксируется гайкой удерживающей от осевого перемещения выходного вала привода относительно корпуса, а другой подшипник контактирует с корпусом, подшипники образуют фиксированную и плавающую опоры выходного вала привода, а сами подшипники содержат эластичное уплотнение.
Сущность изобретения поясняется чертежами.
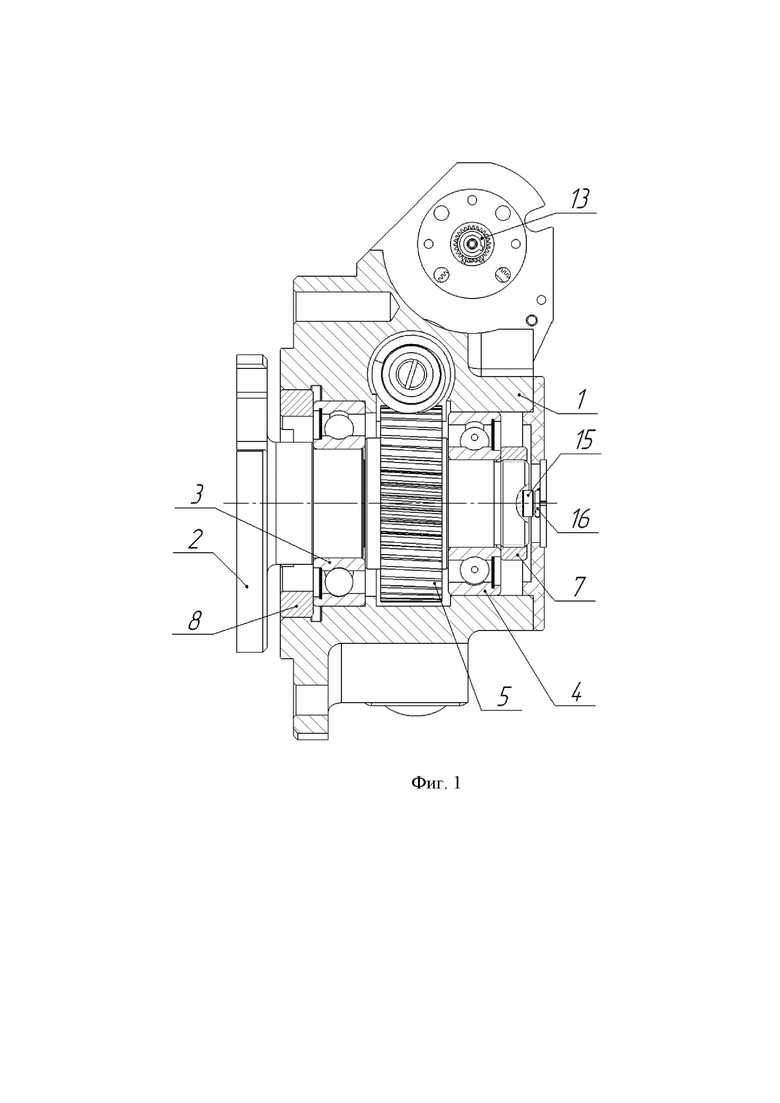
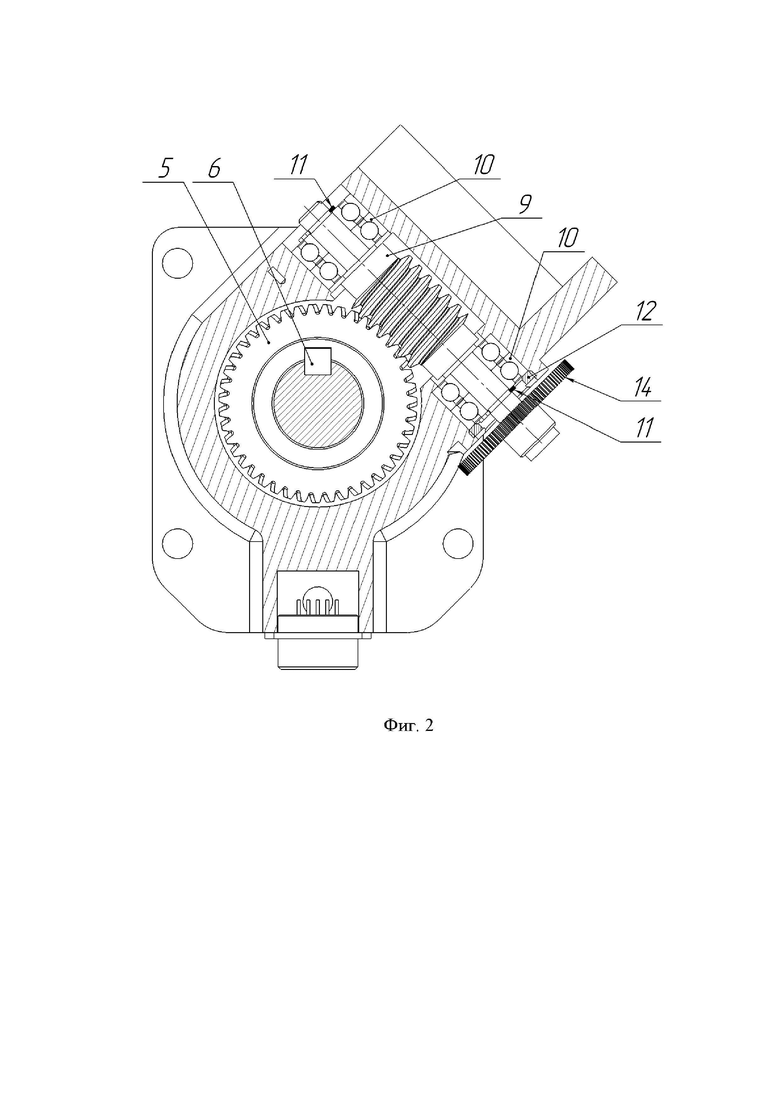
На фиг. 1 представлен рулевой привод в разрезе по продольной оси выходного вала рулевого привода, а на фиг. 2 - рулевой привод в разрезе по продольной оси червяка.
Рулевой привод состоит из корпуса 1, выходного вала привода 2, подшипника 3, имеющего уплотнительный элемент, подшипника 4, имеющего уплотнительный элемент, косозубой шестерни 5, шпонки 6, гайки 7, гайка 8, червяка 9, подшипников 10, стопорных колец 11, гайки 12, ведущей шестерни 13, шестерни 14, магнита 15, бесконтактного магнитного датчика угла поворота 16, электродвигателя (на фиг. не показан).
Выходной вал привода 2 взаимодействует с подшипником 3, шпонкой 6, косозубой шестерней 5, подшипником 4, гайкой 7, которая воздействует на подшипник 4 фиксируя его, косозубую шестерню 5 и подшипник 3 от осевого перемещения относительно выходного вала привода 2.
Подшипник 3 взаимодействует с корпусом 1, фиксируя от осевого смещения выходной вал привода 2 относительно корпуса 1 гайкой 8, через которую проходит выходной конец выходного вала привода 2, взаимодействия с органами управления руля (на фиг. не показано). Подшипник 4 контактирует с корпусом 1 и имеет возможность осевого перемещения при воздействии температурных факторов. На другом конце выходного вала привода 2, с торца, закреплен магнит 15, который без контактно взаимодействует с бесконтактным магнитным датчиком угла поворота 16 закрепленного на корпусе 1.
Косозубая шестерня 5 находится в зацеплении с червяком 9, представляющий собой эвольвентный червяк в виде косозубого цилиндрического колеса с очень большим углом наклона зуба к образующей цилиндра и с малым числом зубьев, при этом профиль витков - зубьев очерчен эвольвентой.
Червяк 9 взаимодействует с двумя парами подшипников 10, шестерней 14, стопорными кольцами 11, которые фиксируют каждую пара подшипников 11 от осевого перемещения. Каждая пара подшипников 10 являются опорами червяка 9 и контактируют с корпусом 1, одна пара подшипников 10 фиксируется относительно корпуса 1 гайкой 12, взаимодействующей с корпусом 1 создавая неподвижную опору червяка 9. Вторая пара подшипников 10, контактируя с корпусом 1 и является подвижной опорой червяка 9, имеющая возможность осевого перемещения при воздействии температурных факторов.
Рулевой привод работает следующим образом. Крутящий момент двигателя передается через шестерню 13, которая закреплена на ее валу и имеет кинематическую связь на шестерню 14, которая вращает червяк 9. Червяк 9 передает вращение косозубой шестерне 5, которая в свою очередь поворачивает выходной вал привода 2 с магнитом 15, при этом выходной конец входного вала привода 2 поворачивает руль на заданный угол задаваемый системой управления и удерживает его. Бесконтактный магнитный датчик угла поворота 16 получая информацию от магнита 15 обеспечивает обратную связь с системой управления информируя ее об угле поворота выходного вала привода 2.
Червячная передача выполнена ортогональной, в виде эвольвентного червяка 9 находящегося в зацеплении с косозубой шестерней 5, не требующая точной установки косозубой шестерни 5 относительно червяка 9, что позволяет установить выходной вал 2 без возможности осевого смещения, зафиксировав одну подшипниковую опору. Плавающая вторая подшипниковая опора предназначена для компенсации температурных деформаций деталей. При этом осевой люфт выходного вала привода 2, влияющий на его угловой люфт, будет определяться только осевым люфтом зафиксированного подшипника 10. Для подшипников 10 нормального класса точности правильным назначением посадок можно обеспечить осевой люфт от нуля до 10 микрон во всем температурном диапазоне эксплуатации изделия.
Применение подшипников 3 и 4 с эластичными уплотнениями упрощает конструкцию корпуса 1 в зоне выхода выходного вала привода 2.
Бесконтактный магнитный датчик угла поворота 16 по сравнению с датчиками, принцип действия которых основан на измерении электрического сопротивления, отличается высокой точностью угловых измерений, составляющей не более 0,02 угловых градуса, не зависящей от колебаний температур. Он не требует механической юстировки (совмещение нулевого положения датчика с нулевым положением выходного вала привода), не имеет механической связи с выходным валом 2. Юстировка бесконтактного магнитного датчика угла поворота 16 простая. Выходной вал 2 устанавливается в нулевое положение и подается напряжение питания на систему управления, контроллер системы управления фиксирует его в качестве нулевого значения и сохраняет в памяти.
Таким образом, предлагаемая конструкция значительно проще, позволяет повысить быстроту и точность позиционирования выходного вала привода, снижает трудоемкость сборочных работ.
Источники информации.
1. Патент №2387577 Российская Федерация, МПК B64C 13/00 (2006.01). Руливой привод : №2009103206 : заявл. 02.02.2009 : опубл. 27.04.2010 / Богацкий В.Г., Дулькин И.И., Зайцев А.В., Левищев О.Н., Пирязев В.Ф. ; заявитель Открытое акционерное общество «Государственное машиностроительное конструкторское бюро «Вымпел « им. И.И. Торопова». - 6 с. : ил. - Текст : непосредственный.
2. Патент №2465725 Российская Федерация, МПК B64C 13/00, H02K 7/116 (2006.01). Электромеханический привод : №2019115409 : заявл. 20.05.2019 : опубл. 14.02.2020 / Апальков В.К., Давыдов А.В., Иванов Б.И., Межирицкий Е.Л., Смирнов Д.Б. ; заявитель Федеральное государственное унитарное предприятие "Научно-производственный центр автоматики и приборостроения имени академика Н.А. Пилюгина" (ФГУП "НПЦАП"). - 12 с. : ил. - Текст : непосредственный.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электромеханический привод руля | 2024 |
|
RU2824682C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРИВОД | 2019 |
|
RU2714343C1 |
| ПЛАНШАЙБА РАСТОЧНОГО СТАНКА С РАДИАЛЬНЫМСУППОРТОМ | 1972 |
|
SU422543A1 |
| МЕХАНИЗМ ПОВОРОТА (ВАРИАНТЫ) | 2002 |
|
RU2225549C2 |
| РУЛЕВАЯ КОЛОНКА | 2019 |
|
RU2709056C1 |
| Тележка для транспортировки листовых грузов | 1989 |
|
SU1638052A1 |
| Усилитель рулевого управления с электрическим приводом | 2019 |
|
RU2721452C1 |
| РУЛЕВОЙ МЕХАНИЗМ | 2014 |
|
RU2617294C1 |
| ТРАНСМИССИЯ СИСТЕМЫ РУЛЕВОГО УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2012 |
|
RU2566095C1 |
| РУЛЕВОЙ БЛОК БЕСПИЛОТНОГО УПРАВЛЯЕМОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2019 |
|
RU2717327C1 |
Изобретение относится к машиностроению. Рулевой привод содержит корпус, электродвигатель, цилиндрическую передачу, ортогональную червячную передачу, датчик обратной связи. Эвольвентный червяк установлен на двух опорах качения, каждая из опор качения состоит из пары шарикоподшипников. Одна из опор качения фиксируется в корпусе с использованием фиксирующей гайки. Выходной вал привода смонтирован на двух шарикоподшипниках. Червяк находится в зацеплении с косозубой шестерней, взаимодействующей с выходным валом привода, имеющую на одном конце выходную часть, взаимодействующую с органами управления, задания и удержания угловых положений руля. На другом конце с торца закреплен магнит, воздействующий на магнитный датчик угла поворота, закрепленный на корпусе. Подшипники опор червяка смонтированы на червяке без возможности осевого смещения, образуя фиксированную и плавающую опоры, а выходной вал привода взаимодействует с подшипниками, косозубой шестерней, гайкой, которая воздействует и фиксирует подшипники и косозубую шестерню от осевого перемещения. Один из подшипников, взаимодействующий с корпусом, фиксируется гайкой удерживающей от осевого перемещения выходного вала привода относительно корпуса, а другой подшипник контактирует с корпусом. Подшипники образуют фиксированную и плавающую опоры выходного вала привода. Подшипники содержат эластичное уплотнение. Обеспечивается упрощение конструкции. 2 ил.
Рулевой привод, содержащий корпус, электродвигатель, цилиндрическую передачу, червячную передачу, причем червяк установлен на двух опорах качения, каждая из опор качения состоит из пары шарикоподшипников, одна из опор качения фиксируется в корпусе с использованием фиксирующей гайки, выходной вал привода смонтирован на двух шарикоподшипниках, датчик обратной связи, отличающийся тем, что червячная передача выполнена ортогональной, в виде эвольвентного червяка, находящегося в зацеплении с косозубой шестерней взаимодействующей с выходным валом привода, имеющую на одном конце выходную часть взаимодействующую с органами управления, задания и удержания угловых положений руля, а на другом конце, с торца закрепленный магнит бесконтактно воздействующий на бесконтактный магнитный датчик угла поворота, который закреплен на корпусе, при этом подшипники опор червяка смонтированы на червяке без возможности осевого смещения, образуя фиксированную и плавающую опоры, а выходной вал привода взаимодействует с подшипниками, косозубой шестерней, гайкой, которая воздействует и фиксирует подшипники и косозубую шестерню от осевого перемещения, причем один из подшипников взаимодействующий с корпусом фиксируется гайкой удерживающей от осевого перемещения выходного вала привода относительно корпуса, а другой подшипник контактирует с корпусом, подшипники образуют фиксированную и плавающую опоры выходного вала привода, а сами подшипники содержат эластичное уплотнение.
| РУЛЕВОЙ ПРИВОД | 2009 |
|
RU2387577C1 |
| WO 2015128162 A1, 03.09.2015 | |||
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРИВОД | 2019 |
|
RU2714343C1 |
| KR 101849259 B1, 16.04.2018. | |||

