Изобретение относится к области беспилотных управляемых летательных аппаратов и может быть использовано в управляемых ракетах, планирующих управляемых беспилотных объектах.
Известны рулевые блоки беспилотных управляемых летательных аппаратов: «Блок управления полетом», патент США №5584448, опубл. 17.12.1996.; «Блок рулевого привода управляемого снаряда», патент РФ №2138764, опубл.27.09.1999; «Воздушно-динамический блок рулевого привода управляемого снаряда», патент РФ №2234670, опубл 20.08. 2004; «Блок рулевого привода управляемого снаряда», патент РФ №2248519, опубл. 20.03.2005.
Перечисленные аналоги не удовлетворяют требованиям синхронности раскрытия управляющих поверхностей (рулей), надежной передачи непрерывно изменяющихся во времени управляющих моментов, быстродействия, габаритов и массы.
В качестве прототипа выбран рулевой блок управления полетом ракеты (патент США №5584448, «Блок управления полетом», МПК F42B 10/14, опубликовано 17.12.1996, конвенционный приоритет 02.12.1993 г., Израиль), как наиболее близкий аналог по решаемой задаче и наибольшему количеству общих признаков.
Известный блок управления полетом содержит цилиндрический корпус с крестообразно расположенными в нем радиальными перегородками, между стенками каждой из которых, установлена рулевая машина с рулем, а также содержит механизм раскрытия рулей, электродвигатель, электронную систему управления.
Поворотные аэродинамические рули установлены на осях складывания в шпангоуте корпуса ракеты. Каждый руль приводится в действие своей рулевой машиной с электродвигателем. Управляющий момент от электродвигателя на руль передается через редуктор и кулачковый механизм, которые находятся между электродвигателем и рулем. Раскрытие руля осуществляется пружиной, выводящей руль в рабочее положение (раскрытие руля).
К недостатками известного блока управления полетом в целом и его рулевого механизма (раскрытия рулей) может быть отнесено следующее:
1. Каждый руль выводится в рабочее положение отдельной пружиной, что не обеспечивает синхронность вывода всех рулей;
2. Пружина, выводящая руль в рабочее положение, находится в растянутом (напряженном) состоянии в течение всего срока хранения до применения;
3. Раздельное расположение управляющего двигателя и руля, наличие между ними редуктора и кулачкового механизма приводит к потерям энергии, в частности за счет люфтов, при передаче на руль изменяющегося во времени управляющего момента;
4. Наличие неизбежных сборочных зазоров в механизмах, обеспечивающих поворот руля, приводит к возникновению паразитных колебаний;
5. Механизм содержит много мелких деталей, что отрицательно влияет на надежность его работы;
6. В целом компоновка требует относительно больших габаритов.
Задачей предлагаемого изобретения является создание малогабаритного рулевого блока повышенной надежности для управляемого летательного аппарата, обеспечивающего синхронность раскрытия рулей.
Техническим результатом (эффектом) настоящего изобретения является расположение по оси рулевого блока одного электродвигателя (вместо 4 по прототипу), взаимодействующего с рулями с помощью понижающего цилиндрического редуктора и самостопорящейся червячной передачи, что позволило обеспечить синхронность раскрытия рулей, снижение габаритно-массовых характеристик и повышение надежности.
Указанный технический результат заключается в том, что в рулевом блоке управляемого летательного аппарата, содержащем корпус с крестообразно расположенными в нем радиальными перегородками, а так же механизм раскрытия рулей, электродвигатель и электронную систему управления, причем между стенками каждой из радиальных перегородок, установлена рулевая машина с рулем, согласно изобретению, электродвигатель расположен по центральной оси рулевого блока, при этом каждый руль жестко связан с выходным валом соответствующей ему рулевой машины, содержащей цилиндрический редуктор с двигателем, а каждая рулевая машина размещена на своей поперечной оси с возможностью поворота на этой оси вместе с рулем на угол, требуемый для вывода руля в рабочее положение, под действием момента, передаваемого корпусу рулевой машины через закрепленный на ее корпусе червячный сектор, находящийся в зацеплении с соответствующим рулевой машине червячным валом, при этом каждый червячный вал принимает крутящий момент через цилиндрическую зубчатую передачу от электродвигателя, а управляющие команды выдаются на рулевые машины электронной системой управления летательным аппаратом, получающей вместе с электродвигателем электропитание от батареи.
Расположение по оси рулевого блока одного электродвигателя, взаимодействующего с рулями каждой рулевой машины с помощью понижающего цилиндрического редуктора и самостопорящейся червячной передачи, обеспечение жесткой связи каждого руля с выходным валом соответствующей ему рулевой машины, размещение каждой рулевой машины на своей поперечной оси с возможностью поворота на этой оси вместе с рулем позволило обеспечить синхронность раскрытия рулей, снижение габаритно-массовых характеристик и повышение надежности.
Применение самостопорящейся червячной передачи для перевода рулей в рабочее положение путем поворота рулевой машины вместе с рулем не требует специального стопорного устройства для предотвращения обратного движения раскрытого руля.
Жесткое закрепление руля на валу рулевой машины, т.е. исключение промежуточных механизмов между валом рулевой машины и рулем, обеспечивает снижение потерь энергии рулевой машины при повороте руля, максимальное снижение габаритно-массовых затрат на размещение рулевой машины и руля, повышение надежности работы механизма в целом. Исключение зазоров и люфтов, неизбежных в промежуточных между рулевой машиной и рулем механизмах, приводит к улучшению управляемости летательного аппарата
Потери энергии при передаче момента от вала двигателя рулевой машины на руль исключаются жестким понижающим цилиндрическим редуктором, входящим в состав рулевой машины, что приводит к снижению энергопотребления и, соответственно, к снижению габаритно-массовых характеристик.
Кроме того, для дополнительного уменьшения габаритов и массы, электронная система управления и батарея электропитания расположены в свободных объемах между радиальными перегородками корпуса рулевого блока.
Наличие в заявляемом изобретении признаков, отличающих его от прототипа, позволяет считать его соответствующим условию "новизна".
Новые признаки, которые содержит отличительная часть формулы изобретения, не выявлены в технических решениях аналогичного назначения и в технических решениях смежных областей техники. На этом основании можно сделать вывод о соответствии заявляемого изобретения условию "изобретательский уровень".
Изобретение иллюстрируется чертежами:
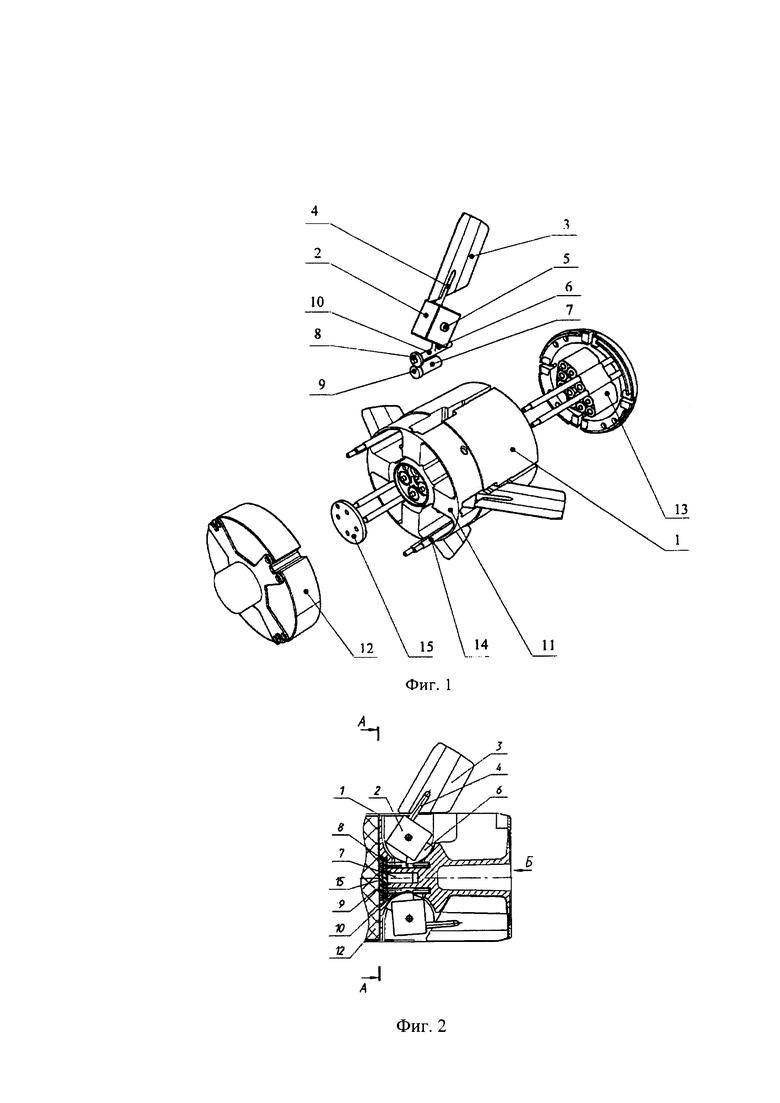
на фиг. 1 представлена аксонометрическая схема рулевого блока;
на фиг. 2 представлен общий вид рулевого блока;
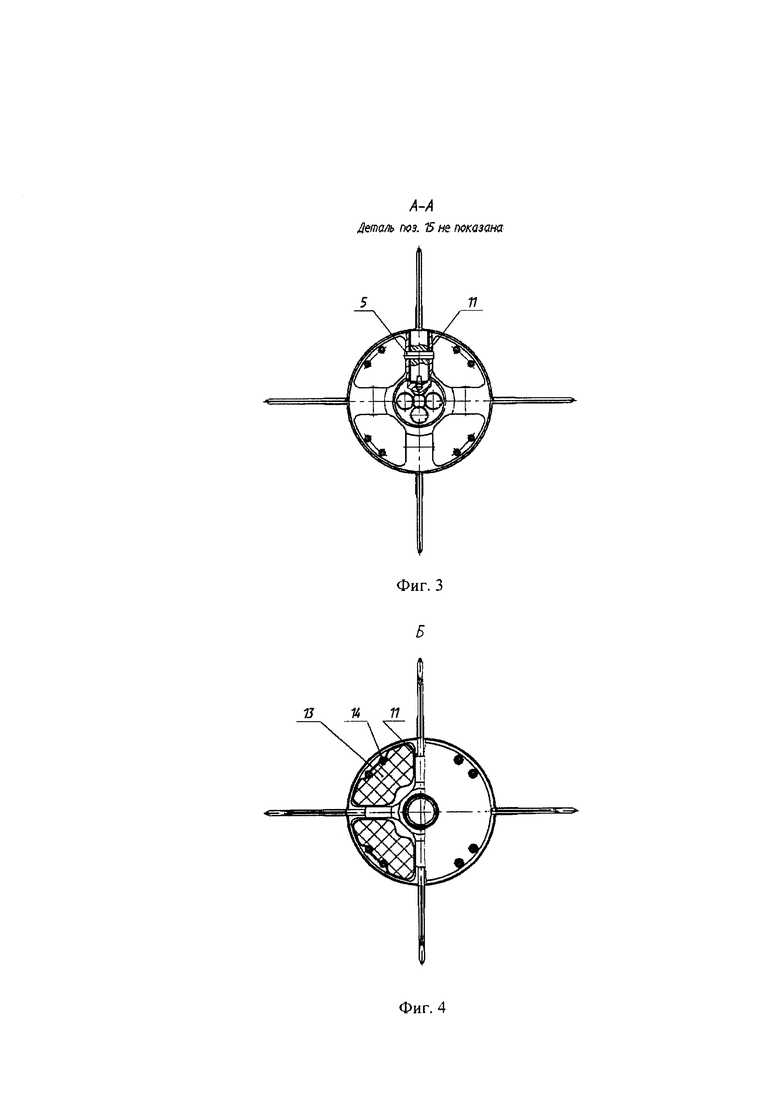
на фиг. 3 представлен разрез рулевого блока по механизму раскрытия рулей;
на фиг. 4 представлен вид рулевого блока сзади;
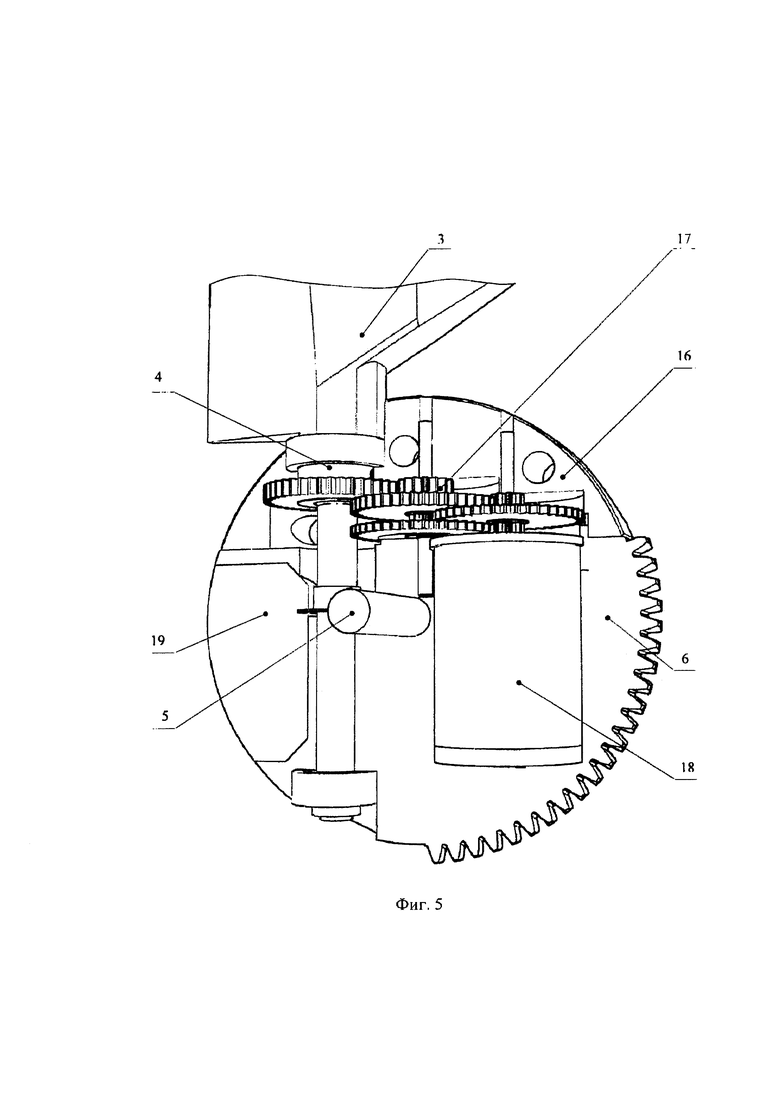
на фиг. 5 представлена рулевая машина с рулем, жестко закрепленным на ее выходном валу.
На чертежах приведены следующие позиции:
1 - Корпус;
2 - Рулевая машина;
3 - Руль;
4 - Выходной вал;
5 - Поперечная ось;
6 - Червячный сектор;
7 - Электродвигатель;
8 - Зубчатое колесо;
9 - Шестерня;
10 - Червяк;
11 - Радиальные перегородки;
12 - Электронная система управления;
13 - Батарея электропитания;
14 - Силовые шпильки;
15 - Крышка;
16 - Корпус рулевой машины;
17 - Цилиндрический редуктор;
18 - Двигатель;
19 - Управляющая микросхема
Предлагаемый рулевой блок управляемого летательного аппарата (фиг. 1, фиг. 2) состоит из корпуса 1 с размещенными в нем четырьмя рулевыми механизмами, механизмом раскрытия рулей в рабочее положение, состоящим из расположенного по центральной оси рулевого блока электродвигателя 7, шестерни 9, четырех зубчатых колес 8, четырех червяков 10, четырех червячных секторов 6, каждый из которых жестко соединен с корпусом 16 соответствующей рулевой машины 2, электронной системы управления 12 летательным аппаратом, батареи электропитания 13, элементов крепления блока в изделии - силовых шпилек 14, амортизирующего компаунда.
Корпус 1 представляет собой полую цилиндрическую конструкцию с крестообразно расположенными внутри под углом 90° разнотолщинными радиальными перегородками 11. В свободных внутренних объемах корпуса между радиальными перегородками 11 размещаются электронная система управления 12 летательным аппаратом и батарея электропитания 13.
Каждый рулевой механизм состоит из рулевой машины 2 с рулем 3, жестко закрепленным на выходном валу 4, червячного сектора 6, находящегося в зацеплении с червяком 10. Каждая рулевая машина 2 установлена на оси 5 с возможностью поворота вместе с рулем 3 относительно этой оси 5.
На червяке 10 закреплено зубчатое колесо 8, находящееся в зацеплении с шестерней 9, закрепленной на валу электродвигателя 7. Указанная цилиндрическая зубчатая передача защищена крышкой 15.
Каждая рулевая машина 2 (фиг. 5) представляет собой корпус 16 с расположенными в нем цилиндрическим редуктором 17, двигателем 18 и управляющей микросхемой 19. Передаточное отношение редуктора 17 обеспечивает требуемый момент на руле 3. Управляющая микросхема 19 регулирует поворотное движение руля 3. В корпусе 16 рулевой машины 2 выполнены посадочные места для оси вращения 5 рулевой машины 2 при раскрытии руля 3. Раскрытие каждого руля 3 осуществляется путем передачи крутящего момента электродвигателя 7 через шестерню 9, зубчатые колеса 8, червяки 10 на червячные секторы 6, при этом рулевые машины 2 поворачиваются на осях 5 вместе с рулями 3 на требуемый угол. В раскрытом положении рулевые машины 2 с рулями 3 фиксируются посредством самостопорящихся червячных передач (червяк - червячный сектор).
Снаружи на корпусе 16 рулевой машины 2 жестко установлен червячный сек тор 6, находящийся в зацеплении с червяком 10, и служащий для передачи на корпус 16 рулевой машины 2 поворотного момента, приводящего руль 3 в рабочее положение.
Электродвигатель 7 размещен в центральной части корпуса 1, продольная ось электродвигателя совмещена с продольной осью корпуса 1. В изделии рулевой блок закрепляется посредством силовых шпилек 14.
Указанной компоновкой достигается минимизация габаритно-массовых характеристик рулевого блока и летательного аппарата в целом, исключаются люфты, неизбежные при передаче управляющих моментов от рулевых машин к рулям через специальные механизмы, за счет жесткого соединения рулей с валами рулевых машин, осуществляется стопорение рулей в раскрытом положении без специальных стопорящих устройств за счет червячных передач, устраняются вибрации.
Расположение электронной системы управления летательным аппаратом и батареи электропитания во внутренних полостях корпуса рулевого блока позволяет минимизировать линии передачи электроэнергии, а также использовать компаунды, защищающие указанные элементы от механических воздействий, при этом рулевой блок представляет собой универсальную конструкцию, способную к применению в различных изделиях.
Работает устройство следующим образом. Для вывода рулей 3 в рабочее положение на электродвигатель 7 подается электропитание от батареи 13. Крутящий момент от электродвигателя 7 передается через закрепленную на выходном валу электродвигателя 7 шестерню 9 на зубчатые колеса 8, связанные с червяками 10. Червяки 10 передают крутящий момент на червячные секторы 6, жестко закрепленные на корпусе 16 соответствующей рулевой машины 2, в результате чего осуществляется одновременный поворот каждой рулевой машины 2 вокруг своей оси 5. Рулевые машины 2 поворачиваются вместе с рулями 3, каждый из которых жестко закреплен на выходном валу 4 соответствующей рулевой машины 2. Поворот рулевых машин 2 с рулями 3 осуществляется на угол, требуемый для вывода рулей 3 в рабочее положение. Фиксирования рулей 3 в рабочем положении не требуется, т.к. их обратному повороту препятствует самостопорящаяся червячная передача. Управляющие моменты передаются на рули 3 рулевыми машинами 2 по командам электронной системы управления 12 летательным аппаратом, получающей электропитание, как и рулевые машины 2, от батареи 13.
Таким образом, при использовании предлагаемого рулевого блока будут обеспечиваться синхронность раскрытия рулей, снижены габаритно-массовых характеристики и повышена надежность.
Размещение в свободных объемах (четвертях) корпуса заявляемого рулевого блока компонентов электронной системы управления и батареи электропитания, а так же применение для соединения составных частей блока между собой и для закрепления блока в изделии внутренних продольных силовых шпилек не требующих дополнительных объемов корпуса для элементов крепления, позволяет уменьшить его габаритно-массовые характеристики и повысить надежность путем минимизации электрических цепей.
Кроме того, заполнение компаундом свободных объемов между перегородками корпуса рулевого блока приводит к снижению возможных виброударных нагрузок.
Представленные сведения свидетельствуют о выполнении при использовании заявляемого изобретения следующей совокупности условий:
- заявляемый рулевой блок управляемого летательного аппарата предназначен для использования в управляемых ракетах, планирующих управляемых беспилотных объектах;
- заявляемый рулевой блок управляемого летательного аппарата при использовании способен обеспечить синхронность раскрытия рулей, уменьшить габаритно-массовые характеристики и повысить надежность работы.
- для заявляемого рулевого блока управляемого летательного аппарата в том виде, в котором он охарактеризован в формуле изобретения, подтверждена возможность осуществления с помощью описанных в заявке и известных до даты приоритета средств и методов.
Следовательно, заявляемый рулевой блок управляемого летательного аппарата соответствует условию «промышленная применимость».
| название | год | авторы | номер документа |
|---|---|---|---|
| Система дозаправки в воздухе с автоматическим управлением и автостабилизируемым заправочным устройством | 2023 |
|
RU2809164C1 |
| ЭЛЕКТРОПРИВОД УПРАВЛЕНИЯ РУЛЕВЫМИ ПОВЕРХНОСТЯМИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2010 |
|
RU2466060C2 |
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ СИСТЕМЫ УПРАВЛЕНИЯ | 2015 |
|
RU2601368C1 |
| Исполнительный механизм системы управления | 2015 |
|
RU2607490C2 |
| Электромеханический привод руля | 2024 |
|
RU2824682C1 |
| Рулевой привод | 2024 |
|
RU2826230C1 |
| Механизм управления аэродинамическими поверхностями | 2021 |
|
RU2776628C1 |
| ВРАЩАЮЩИЙСЯ СНАРЯД С ЭЛЕКТРИЧЕСКИМ РУЛЕВЫМ ПРИВОДОМ | 2005 |
|
RU2285227C1 |
| Блок рулевых приводов управляемого снаряда | 2024 |
|
RU2834610C1 |
| АППАРАТУРА ДЛЯ НАБЛЮДЕНИЯ ЗА ПРОСТРАНСТВОМ НА ФОНЕ ЯРКОГО УДАЛЕННОГО ИСТОЧНИКА СВЕТА | 2008 |
|
RU2366974C1 |
Изобретение относится к области управления летательных аппаратов и может быть использовано в управляемых ракетах, планирующих управляемых беспилотных объектах. Технический результат – обеспечение синхронности раскрытия рулей, снижение габаритно-массовых характеристик и повышение надежности. Устройство содержит корпус с крестообразно расположенными в нем радиальными перегородками, механизм раскрытия рулей, электродвигатель и электронную систему управления. Между стенками каждой из радиальных перегородок установлена рулевая машина с рулем. Электродвигатель расположен по центральной оси рулевого блока. Каждый руль жестко связан с выходным валом соответствующей ему рулевой машины, содержащей цилиндрический редуктор с двигателем. Каждая рулевая машина размещена на своей поперечной оси с возможностью поворота на этой оси вместе с рулем на угол, требуемый для вывода руля в рабочее положение под действием момента, передаваемого корпусу рулевой машины через закрепленный на корпусе червячный сектор, находящийся в зацеплении с соответствующим рулевой машине червячным валом. Каждый червячный вал обеспечен возможностью приема крутящего момента через цилиндрическую зубчатую передачу от электродвигателя. Обеспечена возможность выдачи управляющих команд на рулевые машины электронной системой управления. 1 з.п. ф-лы, 5 ил.
1. Рулевой блок беспилотного управляемого летательного аппарата, содержащий корпус с крестообразно расположенными в нем радиальными перегородками, механизм раскрытия рулей, электродвигатель и электронную систему управления, причем между стенками каждой из радиальных перегородок установлена рулевая машина с рулем, отличающийся тем, что электродвигатель расположен по центральной оси рулевого блока, при этом каждый руль жестко связан с выходным валом соответствующей ему рулевой машины, содержащей цилиндрический редуктор с двигателем, а каждая рулевая машина размещена на своей поперечной оси с возможностью поворота на этой оси вместе с рулем на угол, требуемый для вывода руля в рабочее положение, под действием момента, передаваемого корпусу рулевой машины через закрепленный на корпусе червячный сектор, находящийся в зацеплении с соответствующим рулевой машине червячным валом, при этом каждый червячный вал обеспечен возможностью приема крутящего момента через цилиндрическую зубчатую передачу от электродвигателя, а электронная система управления выполнена с возможностью выдачи управляющих команд и получения вместе с электродвигателем электропитания от батареи.
2. Рулевой блок по п. 1, отличающийся тем, что электронная система управления и батарея электропитания расположены в свободных объемах между радиальными перегородками корпуса.
| US 5584448 A, 17.12.1996 | |||
| БЛОК РУЛЕВОГО ПРИВОДА УПРАВЛЯЕМОГО СНАРЯДА | 1997 |
|
RU2138764C1 |
| ВОЗДУШНО-ДИНАМИЧЕСКИЙ БЛОК РУЛЕВОГО ПРИВОДА УПРАВЛЯЕМОГО СНАРЯДА | 2002 |
|
RU2234670C2 |
| 0 |
|
SU152792A1 | |
| RU 2005130270 A, 10.04.2007 | |||
| МНОГОВИНТОВОЙ БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2014 |
|
RU2567496C1 |
| US 8544788 B1, 01.10.2013. | |||

