Электромеханический привод относится к исполнительным устройствам приборов систем управления и предназначен для поворота управляемого звена на заданный угол, в соответствии с управляющим сигналом, а также удержании заданного положения. Может применяться в приборостроении, машиностроении, авиации и космонавтике, а также других областях промышленности, где требуется точное задание и удержание угловых положений органов управления.
Из уровня техники известен блок рулевых приводов (патент RU 2102282 от 13.11.1996 г.), состоящий из четырех приводов, каждый из которых содержит собственный корпус, неполноповоротный вал рулевой поверхности, высокоскоростной электродвигатель, многоступенчатый редуктор, выполненный из трех типов последовательно расположенных зубчатых передач: входной конической, цилиндрической и выходной волновой, и датчик обратной связи положения вала рулевой поверхности, включающий разрезную шестерню. Выходная волновая передача выполнена двухволновой по симметричной схеме и содержит узкое гибкое колесо-кольцо с наружным зубчатым венцом, размещенное внутри жесткого колеса и внутри которого размещен волнообразователь в виде зубчатого колеса с трубчатым валом, на котором с помощью эксцентриков расположены три диска, причем крайние из них симметричны среднему, кроме того, по обе стороны жесткого колеса симметрично расположены жестко соединенные с корпусом исполнительного механизма две волновые муфты с внутренним расположением зубьев, взаимодействующих с наружным зубчатым венцом гибкого колеса-кольца. Входная коническая передача состоит из двух колес с одинаковым числом зубьев, одно из которых насажено на вал электродвигателя, а другое на вал цилиндрической шестерни, взаимодействующей с зубчатым колесом волнообразователя и образующей с ним цилиндрическую передачу, при этом элементы волновой передачи расположены концентрично с валом рулевой поверхности, а снаружи на жесткое колесо насажен стакан, который охватывает одну из муфт и имеет зубчатый сектор, взаимодействующий с разрезной шестерней датчика обратной связи положения вала рулевой поверхности, дно стакана жестко соединено с валом рулевой поверхности и содержит дугообразные прорези для размещения в них стоек крепления волновой муфты с корпусом.
Недостатками вышеописанного привода являются:
1. Нетехнологичная в производстве и сборке волновая передача;
2. Датчик обратной связи имеет в своем взаимодействии дополнительные звенья, что не обеспечивает должной надежности и достоверности информации о положении выходного вала.
Задачей предлагаемого электромеханического привода является обеспечение достоверности информации о положении выходного вала с датчика обратной связи, минимального люфта выходного вала, а также повышение технологичности сборки электромеханического привода.
Поставленная задача решается тем, что электромеханический привод, состоящий из: электродвигателя, двух цилиндрических зубчатых передач, выходного вала и датчика обратной связи, объединенных в едином корпусе, дополнен самотормозящей однозаходной червячной передачей, состоящей из находящихся в зацеплении червяка и червячного колеса, жестко закрепленного на выходном валу привода, причем червяк установлен на двух опорах качения. Каждая из опор качения состоит из пары шарикоподшипников, одна из опор качения фиксируется в корпусе с использованием фиксирующей гайки и упорного кольца, а вторая опора качения выполнена с использованием регулирующей гайки и механического фиксатора. Выходной вал привода смонтирован на двух шарикоподшипниках, закреплен в корпусе с использованием двух корончатых гаек: внешней и внутренней, и механических фиксаторов. Выходной вал привода установлен в корпусе с использованием стандартной манжеты и резинового кольца особой формы, установленного в канавке между внешней гайкой и корпусом. Две цилиндрические зубчатые передачи, состоят из: трибки, установленной на валу электродвигателя, промежуточного двухвенцового зубчатого колеса и зубчатого колеса, жестко закрепленного на червяке, причем промежуточное двухвенцовое зубчатое колесо находится в зацеплении с зубчатым колесом, закрепленным на червяке и трибкой. Датчик обратной связи соединен с выходным валом привода за счет плоской пружины.
В дальнейшем техническое решение поясняется описанием чертежей, на которых:
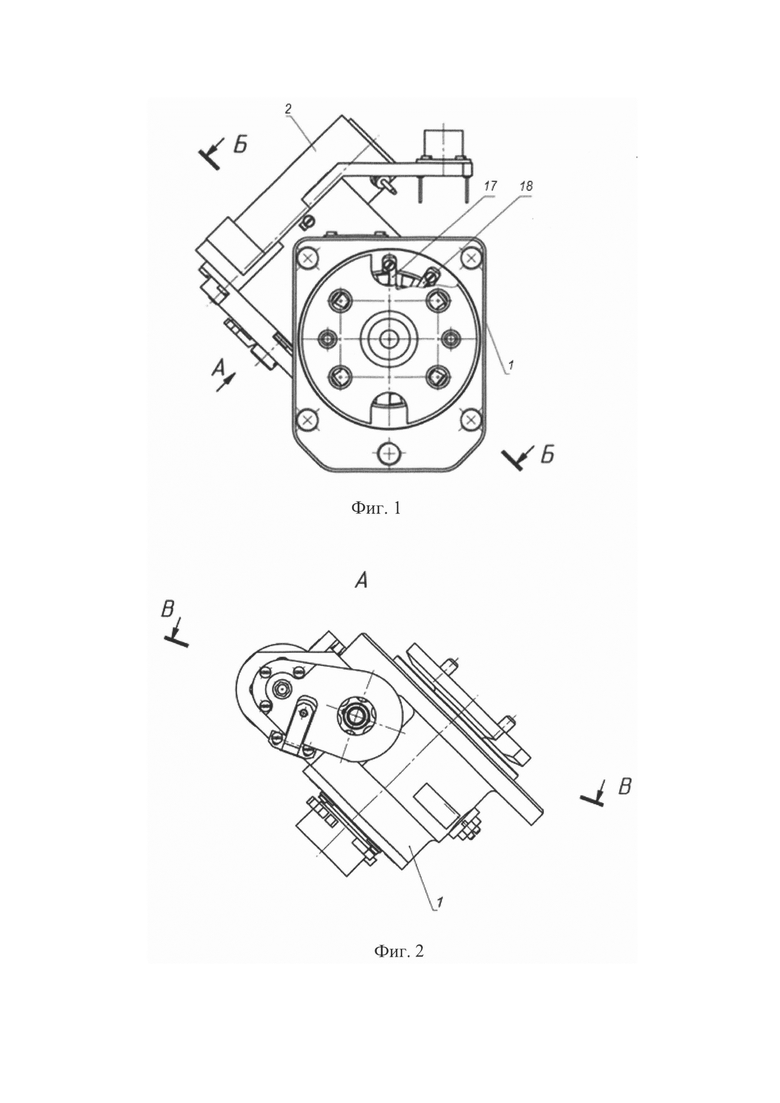
Фиг. 1 - вид спереди;
Фиг. 2 - вид А;
Фиг. 3 - вид сверху;
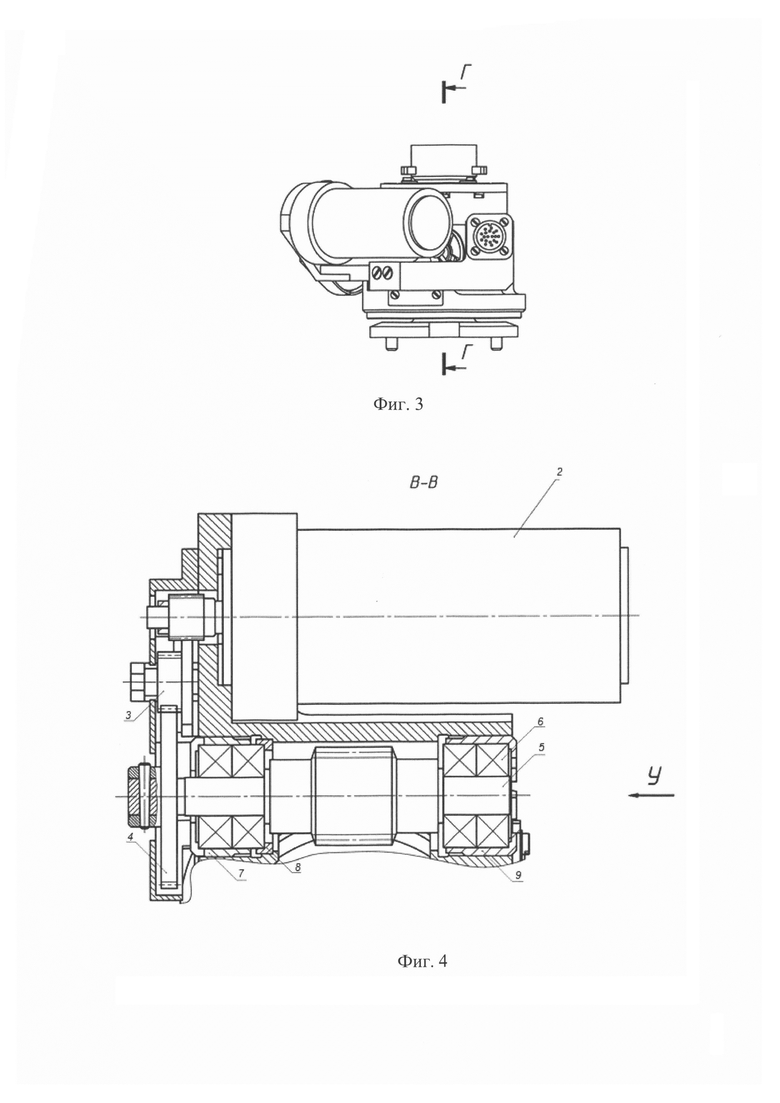
Фиг. 4 - разрез В-В;
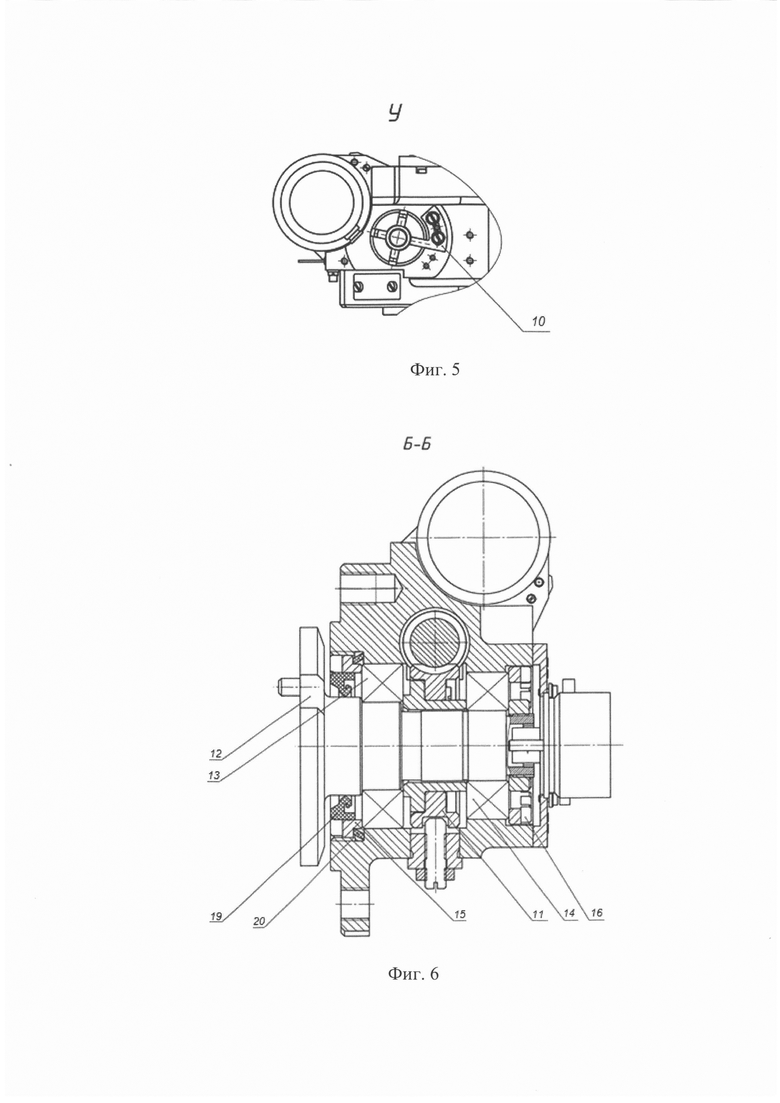
Фиг. 5 - вид У;
Фиг. 6 - разрез Б-Б;
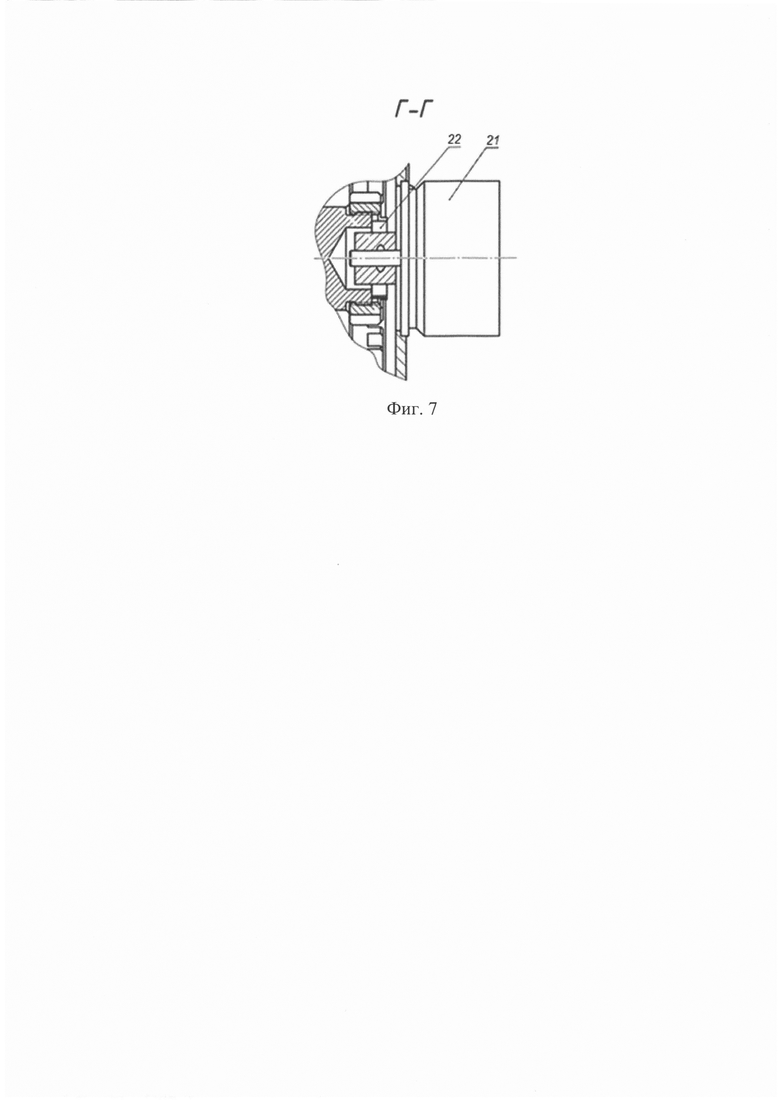
Фиг. 7 - разрез Г-Г.
На фиг. 1 - фиг. 6 приведены следующие обозначения:
1 - корпус;
2 - электродвигатель;
3 - промежуточное зубчатое колесо;
4 - зубчатое колесо;
5 - червяк;
6 - шарикоподшипник;
7 - фиксирующая гайка;
8 - упорное кольцо;
9 - регулирующая гайка;
10 - механический фиксатор;
11 - червячное колесо;
12 - выходной вал привода;
13, 14 - шарикоподшипники;
15, 16 - внешняя и внутренняя гайки;
17, 18 - механические фиксаторы;
19 - манжета;
20 - резиновое кольцо;
21 - датчик обратной связи;
22 - плоская пружина.
Электромеханический привод состоит из объединенных в едином корпусе (1): электродвигателя (2), двух цилиндрических зубчатых и одной самотормозящейся однозаходной червячной передачи (малый угол подъема винтовой линии червяка), выходного вала привода и датчика обратной связи.
Источником крутящего момента в приводе является электродвигатель (2) с трибкой, приводящий в движение промежуточное зубчатое колесо (3), далее движение передается зубчатому колесу (4), жестко закрепленному на червяке (5) (фиг. 4).
Червяк (5) (фиг. 4) установлен на двух опорах качения. Каждая из опор качения состоит из пары шарикоподшипников (6). Одна из опор качения фиксируется в корпусе с использованием фиксирующей гайки (7) и упорного кольца (8), а вторая опора качения выполнена с использованием регулирующей гайки (9) и механического фиксатора (10) (фиг. 5), служащего для уменьшения осевой игры шарикоподшипников до минимально возможного значения, что существенно сказывается на снижении углового люфта выходного вала привода.
Червяк (5), взаимодействуя с червячным колесом (11), приводит в движение выходной вал привода (12) (фиг. 6).
Червяк (5) выполнен однозаходным с малым углом подъема винтовой линии для обеспечения самоторможения выходного вала привода (12).
С целью повышения технологичности сборки привода и простоты регулировки совпадения средней плоскости червячного колеса и оси червяка (для обеспечения высокого КПД и кинематической точности зацепления) выходной вал привода (12) (фиг. 6) смонтирован на двух шарикоподшипниках (13 и 14) и закреплен в корпусе с использованием двух гаек: внешней (15) и внутренней (16). Гайки имеют мелкую резьбу и корончатый венец, которые в совокупности, позволяют осуществлять микроперемещения червячного колеса вдоль оси выходного вала привода и обеспечивать сохранение отрегулированного положения за счет использования механических фиксаторов (17 и 18) (фиг. 1). Фиксаторы имеют зеркальную форму, тем самым в два раза увеличивая количество фиксированных положений гаек.
Для обеспечения герметичности привода выходной вал привода (фиг. 6) устанавливается в корпус с использованием стандартной (ГОСТ 8752-79) манжеты (19) и резинового кольца особой формы (20), установленного в канавке между внешней гайкой (15) и корпусом. Резиновое кольцо особой формы (20) обеспечивает герметичность резьбового соединения внешней гайки (15) и корпуса вне зависимости от осевого перемещения гайки в пределах возможной регулировки.
Датчик обратной связи (21) (фиг. 7) устанавливается на поверхности крышки, закрывающей внутреннюю гайку, и находится в постоянной механической связи с выходным валом привода, посредством плоской пружины (22), устраняющей погрешности при передаче вращения с выходного вала на датчик обратной связи.
Таким образом, предложен электромеханический привод, состоящий из: электродвигателя, двух цилиндрических зубчатых передач, выходного вала и датчика обратной связи, объединенных в едином корпусе, дополнен самотормозящей однозаходной червячной передачей, состоящей из находящихся в зацеплении червяка и червячного колеса, жестко закрепленного на выходном валу привода, причем червяк установлен на двух опорах качения. Каждая из опор качения состоит из пары шарикоподшипников, одна из опор качения фиксируется в корпусе с использованием фиксирующей гайки и упорного кольца, а вторая опора качения выполнена с использованием регулирующей гайки и механического фиксатора. Выходной вал привода смонтирован на двух шарикоподшипниках, закреплен в корпусе с использованием двух корончатых гаек: внешней и внутренней, и механических фиксаторов. Выходной вал привода установлен в корпусе с использованием стандартной манжеты и резинового кольца особой формы, установленного в канавке между внешней гайкой и корпусом. Две цилиндрические зубчатые передачи, состоят из: трибки, установленной на валу электродвигателя, промежуточного двухвенцового зубчатого колеса и зубчатого колеса, жестко закрепленного на червяке, причем промежуточное двухвенцовое зубчатое колесо находится в зацеплении с зубчатым колесом, закрепленным на червяке и трибкой. Датчик обратной связи соединен с выходным валом привода за счет плоской пружины.
Техническим результатом от предложенного электромеханического привода является повышение технологичности сборки привода, обеспечение минимального люфта выходного вала привода, упрощение регулировки совпадения средней плоскости червячного колеса и оси червяка, достоверность информации о положении выходного вала за счет постоянной механической связи датчика обратной связи с выходным валом привода.
| название | год | авторы | номер документа |
|---|---|---|---|
| Рулевой привод | 2024 |
|
RU2826230C1 |
| Электромеханический привод руля | 2024 |
|
RU2824682C1 |
| ПРИВОД ДВИГАТЕЛЬНЫЙ МАЛОГАБАРИТНЫЙ | 2017 |
|
RU2675288C1 |
| УНИВЕРСАЛЬНЫЙ ВЫСОКОМОМЕНТНЫЙ МНОГООБОРОТНЫЙ ЭЛЕКТРОПРИВОД ЗАПОРНОЙ АРМАТУРЫ ТРУБОПРОВОДНОГО ТРАНСПОРТА | 2011 |
|
RU2457385C1 |
| КОМБИНИРОВАННЫЙ ПРИВОД ИСПОЛНИТЕЛЬНОГО МЕХАНИЗМА ОТ ЭЛЕКТРОДВИГАТЕЛЯ И/ИЛИ ОТ РУЧНОГО УСИЛИЯ (ВАРИАНТЫ) | 2002 |
|
RU2226633C1 |
| КАРТЕР КОРОБКИ ПЕРЕДАЧ | 1993 |
|
RU2227234C2 |
| ПАЛЕЦ ПРОТЕЗА СО СПИРОИДНЫМ РЕДУКТОРОМ И МОДУЛЬНАЯ КОНСТРУКЦИЯ ПРОТЕЗА ВЕРХНЕЙ КОНЕЧНОСТИ | 2019 |
|
RU2727893C1 |
| Механизм перемещения рабочей поверхности стола | 1980 |
|
SU961659A1 |
| Токарный многооперационный станок | 1985 |
|
SU1321526A1 |
| ЭЛЕКТРОПРИВОД К ЗАДВИЖКАМ ТРУБОПРОВОДОВ | 2001 |
|
RU2218504C2 |
Изобретение относится к исполнительным устройствам приборов систем управления и предназначено для поворота управляемого звена на заданный угол, а также удержания заданного положения. Электромеханический привод состоит из электродвигателя, двух цилиндрических зубчатых передач, выходного вала привода и датчика обратной связи, объединенных в едином корпусе. Привод дополнен самотормозящей однозаходной червячной передачей, состоящей из червяка и червячного колеса, причем червяк установлен на двух опорах качения. Каждая из опор качения состоит из пары шарикоподшипников, одна из опор качения фиксируется в корпусе с использованием фиксирующей гайки и упорного кольца, а вторая опора качения выполнена с использованием регулирующей гайки и механического фиксатора. Выходной вал привода смонтирован на двух шарикоподшипниках, закреплен в корпусе с использованием двух корончатых гаек: внешней и внутренней, и механических фиксаторов. Датчик обратной связи соединен с выходным валом привода за счет плоской пружины. Обеспечивается повышение технологичности сборки привода, минимальный люфт выходного вала привода, упрощение регулировки совпадения средней плоскости червячного колеса и оси червяка. 7 ил.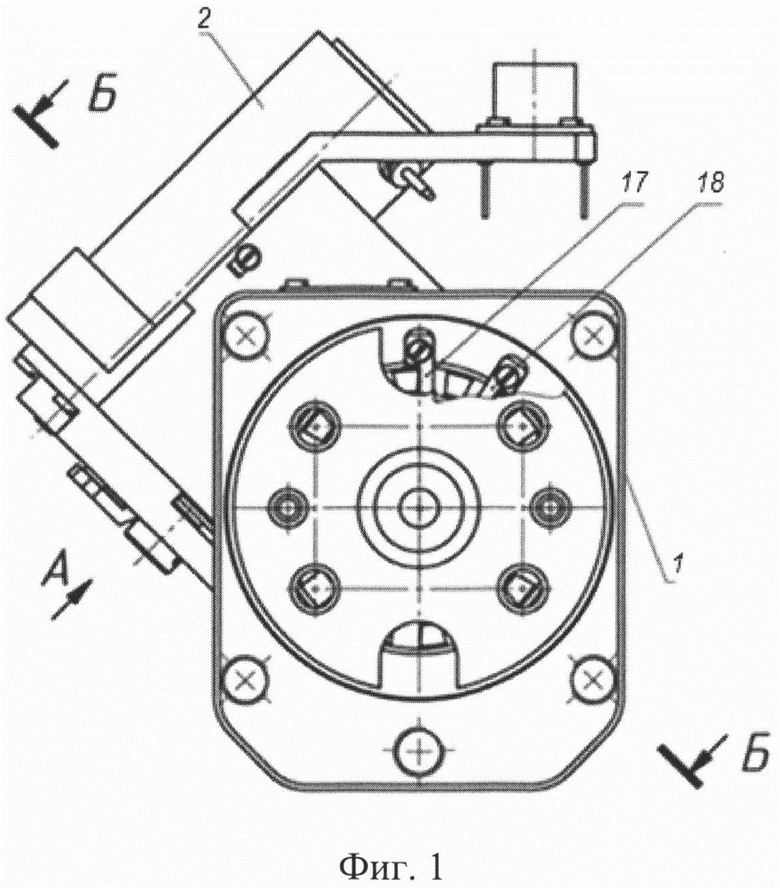
Электромеханический привод, состоящий из: электродвигателя, двух цилиндрических зубчатых передач, выходного вала привода и датчика обратной связи, объединенных в едином корпусе, отличающийся тем, что электромеханический привод дополнен самотормозящей однозаходной червячной передачей, состоящей из находящихся в зацеплении червяка и червячного колеса, жестко закрепленного на выходном валу привода, причем червяк установлен на двух опорах качения, каждая из опор качения состоит из пары шарикоподшипников, одна из опор качения фиксируется в корпусе с использованием фиксирующей гайки и упорного кольца, а вторая опора качения выполнена с использованием регулирующей гайки и механического фиксатора, выходной вал привода смонтирован на двух шарикоподшипниках, закреплен в корпусе с использованием двух корончатых гаек: внешней и внутренней, и механических фиксаторов, выходной вал привода установлен в корпусе с использованием стандартной манжеты и резинового кольца особой формы, установленного в канавке между внешней гайкой и корпусом, две цилиндрические зубчатые передачи состоят из трибки, установленной на валу электродвигателя, промежуточного двухвенцового зубчатого колеса и зубчатого колеса, жестко закрепленного на червяке, причем промежуточное двухвенцовое зубчатое колесо находится в зацеплении с зубчатым колесом, закрепленным на червяке, и трибкой, датчик обратной связи соединен с выходным валом привода за счет плоской пружины.
| БЛОК РУЛЕВЫХ ПРИВОДОВ | 1996 |
|
RU2102282C1 |
| РУЛЕВОЙ МЕХАНИЗМ | 2014 |
|
RU2617294C1 |
| ОПОРНО-ПОВОРОТНОЕ УСТРОЙСТВО КРАНОМАНИПУЛЯТОРНОЙ УСТАНОВКИ | 2001 |
|
RU2230699C2 |
| НАСОС СВЕРЛЯЩЕГО ПЕРФОРАТОРА | 1992 |
|
RU2043540C1 |

