ОБЛАСТЬ ТЕХНИКИ
Настоящее техническое решение относится к области вычислительной техники, в частности, к способам подбора последовательности управляющих сигналов для управления исполнительным устройством, не предусматривающим обратной связи, в частности, одним из применений указанного способа является управление дисплеями, функционирующими на основе принципа электрофореза.
УРОВЕНЬ ТЕХНИКИ
Из уровня техники известно решение, выбранное в качестве наиболее близкого аналога, US 2022138986 (A1), опубл. 05.05.2022. Данное решение предназначено для конфигурирования устройства измерения цвета. В конкретной реализации предусмотрен способ сопоставления измерений цвета, путем реализации одноэтапного процесса калибровки и преобразования цвета с использованием искусственной нейронной сети (ИНС). В качестве примера необработанные отсчеты от устройства измерения цвета преобразуются в конкретное цветовое пространство, такое как L*a*b, непосредственно через ИНС. Такая искусственная нейронная сеть обучается для обеспечения того, чтобы выходные данные измерения цвета с устройства измерения цвета совпадали с выходными данными измерения цвета с целевого устройства измерения цвета. При этом указанное изобретение решает качественно иную задачу: с помощью ИНС достигается единообразие колориметрических измерений на разных устройствах, в то время как предлагаемое решение решает задачу поиска оптимальных параметров для формирования изображения на экране работающем на явлении электрофореза (далее - дисплей на основе электронных чернил).
Предлагаемое техническое решение направлено на устранение недостатков современного уровня техники и отличается от известных ранее тем, что предложенное решение осуществляет более качественный и эффективный подбор последовательности управляющих сигналов для исполнительных устройств, не предоставляющих непосредственной обратной связи. Ввиду отсутствия обратной связи управляющее устройство не располагает данными о том, как прошел управляющий сигнал и также не имеет возможности адаптироваться к изменяющимся внешним условиям.
Предлагаемое решение направлено на создание способа управления устройствами, не предоставляющими обратной связи, основанного на введении в состав технической системы наблюдающего устройства (датчика) и нейросети, при помощи которых управляющее устройство обучается выдавать такие управляющие сигналы, которые наиболее точно будут приводить к требуемым результатам, например, в качестве такого сигнала могут использоваться вейвформы для отображения изображения на дисплее, работающем на явлении электрофореза (дисплей на основе электронных чернил).
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Технической проблемой, на решение которой направлено заявленное решение, является создание способа подбора последовательности сигналов для приведения исполнительного устройства в требуемое состояние, например, для отображения изображения на дисплее работающем на явлении электрофореза. Одновременно такой способ может применяться в любой технической системе без непосредственной обратной связи, либо в таких системах, где непосредственная обратная связь дополняется другими источниками информации о состоянии систем – например, в беспилотных летательных аппаратах, робототехнических системах, аудио-системах и проч.
Технический результат заключается в улучшении качества, скорости, стабильности управления техническими системами.
Заявленный технический результат достигается за счет осуществления способа подбора последовательности сигналов для изменения управляемого устройства, содержащего этапы, на которых:
a) вычислительное устройство (4), посредством контроллера (1) генерирует управляющий сигнал для перехода исполнительного устройства (2) от текущего состояния к ожидаемому состоянию;
b) вычислительное устройство (4), посредством контроллера (1) отправляет сгенерированный управляющий сигнал на исполнительное устройство (2) для перехода исполнительного устройства (2) от текущего состояния к ожидаемому состоянию;
c) датчик (3) регистрирует полученное в результате обработки управляющего сигнала состояние исполнительного устройства (2);
d) полученные от датчика (3) данные о состоянии исполнительного устройства (2) передаются в вычислительное устройство (4);
e) в случае, если полученное состояние исполнительного устройства (2) отличается от целевого, вычислительное устройство (4), осуществляет вычисление нового сигнала, а именно:
i) нейронная сеть, связанная с вычислительным устройством (4), получает на вход текущее и целевое состояние исполнительного устройства (2) и вычисляет параметры нового сигнала;
ii) вычисленный сигнал отправляется на исполнительное устройство (2);
iii) датчиком (3) считывается полученное состояние исполнительного устройства (2) и передается на ввод вычислительного устройства (4);
iv) далее, если имеется разница между ожидаемым состоянием и полученным состоянием исполнительного устройства (4), веса нейронов нейронной сети обновляются посредством алгоритма обновления весов нейронной сети;
v) нейронная сеть после обновления весов вычисляет новые параметры сигнала и запускается новый цикл управления с отправкой сигнала на исполнительное устройство (2).
В частном варианте реализации описываемого решения, способ по п.1, в котором в качестве датчика устройства или нескольких устройств применяется датчик или группа датчиков, считывающих состояние нескольких областей исполнительного устройства одновременно.
В частном варианте реализации описываемого решения, способ по п.1, отличающийся тем, что выполняют одновременное считывание по меньше мере одного или нескольких участков исполнительного устройства (2).
В частном варианте реализации описываемого решения, устройство для реализации способа по п.1, в котором исполнительное устройство (2) представлено экраном (дисплеем).
В частном варианте реализации описываемого решения, способ по п.1, в котором контроллер (1) и датчик (3), а также нейронная сеть реализованы в составе вычислительного устройства (4) и имеют программно-аппаратное исполнение.
В частном варианте реализации описываемого решения, способ по п.1, применяемый для поиска и записи параметров вейвформ для управления дисплеями (экранами), работающими на явлении электрофореза.
В частном варианте реализации описываемого решения, устройство для реализации способа по п.1, в котором исполнительное устройство (2) представлено экраном (дисплеем), а датчик (3) представлен прибором для регистрации изображения.
В частном варианте реализации описываемого решения, устройство для реализации способа по п.1, в котором исполнительное устройство (2) представлено экраном (дисплеем), а датчики представлены комбинацией датчиков различного типа, в том числе одним или несколькими приборами машинного зрения, одним или несколькими приборами, регистрирующим температуру поверхности экрана (дисплея).
В частном варианте реализации описываемого решения, устройство по п.4, дополнительно содержащее по меньшей мере один источник света для освещения поверхности экрана (дисплея).
В частном варианте реализации описываемого решения, устройство по п.4, дополнительно содержащее по меньшей мере одну рассеивающую камеру (лайт-бокс) для стабилизации условий освещения.
В частном варианте реализации описываемого решения, устройство по п.4, дополнительно содержащее по меньшей мере один датчик освещения для калибровки уровней освещенности и контроля стабильности результатов работы устройства.
В частном варианте реализации описываемого решения, устройство по п.4, имеющее корпусное, или бескорпусное, или настольное, или мобильное, или стационарное исполнение в зависимости от требований конечного пользователя и(или) условий использования.
В частном варианте реализации описываемого решения, устройство по п.4, оснащенное интегрированным вычислительным блоком для автономной работы без подключения к другим вычислительным системам.
В частном варианте реализации описываемого решения, устройство по п.4, не имеющее интегрированного вычислительного блока и управляемое внешним вычислительным устройством по проводному или беспроводному каналу связи.
В частном варианте реализации описываемого решения, устройство по п.4, имеющее по меньше мере одно место для размещения и подсоединения одного или нескольких экранов (дисплеев), работающих на явлении электрофореза, причем дисплеи подсоединяются к устройству через различные стандартные физические коннекторы типа FPC, SlimPort, MHL, FFC и прочие, при этом конкретный способ присоединения дисплеев зависит от стандарта, используемого на самом дисплее, при этом устройство может поддерживать сразу несколько стандартов для подсоединения широкой номенклатуры дисплеев разных стандартов.
В частном варианте реализации описываемого решения, устройство, реализующее способ по п.1, предназначенное для поиска вейвформ для дисплеев (экранов), работающих на явлении электрофореза (экран/дисплей на электронных чернилах, EPD, e-ink экран/дисплей), определения комбинаций вейвформ с новыми свойствами, улучшающими характеристики изображений, выводимых с помощью таких усовершенствованных вейвформ.
В частном варианте реализации описываемого решения, осуществляется применение указанного в п.1 способа для калибровки и повышения качества изображения информации на любых дисплеях и средства отображения, способных отображать визуальную информацию согласно заданным параметрам, в том числе таких как жидкокристаллические дисплеи, дисплеи на органических диодах, механические, электромеханические, фотонно-кристаллические, а также иные прочие, где с помощью описанной последовательности действий достигается максимальное соответствие между выводимым изображением и фактическим изображением, полученным на устройстве отображения.
В частном варианте реализации описываемого решения, осуществляется применение указанного в п.1 способа для калибровки и повышения качества воспроизведения в аудио-системах любых типов, причем вычислительное устройство может быть представлено цифро-аналоговым преобразователем, датчик может быть представлен одним или несколькими микрофонами, исполнительное устройство может быть представлено звуковым усилителем с источниками звука, которые адаптируются к акустическим свойствам помещений и окружающих предметов, минимизируя негативные акустические свойства таких помещений и предметов, учитывая фактические переотражения звука и способность к звукопоглощению при цифроаналоговом преобразовании звука для достижения максимальной достоверности звучания.
В частном варианте реализации описываемого решения, осуществляется применение указанного в п.1 способа в системах управления роботизированными устройствами, дистанционно управляемыми и(или) беспилотными техническими средствами, заключающееся в том, что в качестве вычислительного устройства используют контроллер или блок управления техническим средством, в качестве исполнительного устройства используют силовую установку (например, двигательные установки) и исполнительные органы управления (например, поворотные механизмы, отклоняемые аэродинамические поверхности), а в качестве датчиков – гироскоп, акселерометр, лидар, приемник сигнала спутниковой навигации, радиовысотомер, при помощи которых определяют положение, ориентацию и скорость технического средства, а результатом применения способа является обучение вычислительного устройства генерации более качественных управляющих сигналов для стабильного выполнения задания и более точного маневрирования.
В частном варианте реализации описываемого решения, осуществляется применение указанного в п.1 способа в интеллектуальных системах отопления, вентиляции, кондиционирования (HVAC), при этом вычислительное устройство может генерировать управляющие сигналы для систем кондиционирования, отопления или вентиляции, а в качестве исполнительных устройств применяют вентиляторы, заслонки или клапаны, которые регулируют поток воздуха и температуру, а в качестве датчиков применяют, например, датчики температуры и датчики влажности, которые используются для мониторинга условий окружающей среды, а результатом применения способа является обучение вычислительного устройства генерации более качественных управляющих сигналов для повышения энергоэффективности и поддержания оптимальных условий отопления, вентиляции или кондиционирования.
В частном варианте реализации описываемого решения, осуществляется применение указанного в п.1 способа в интеллектуальных моторизованных протезах конечностей, при этом вычислительное устройство может генерировать управляющие сигналы для движения элементов протезов, в качестве исполнительных устройств применяются, например, двигатели или другие механизмы, управляющие движением протеза, в качестве датчиков могут применяться мышечные датчики, датчики силы или энкодеры, используемые для сбора данных о командах пользователя и о состояниях двигаемых элементов протеза и конечности в целом, а результатом применения способа является обучение вычислительного устройства генерации более качественных управляющих сигналов для более естественного и интуитивно понятного управления протезами.
В частном варианте реализации описываемого решения, осуществляется применение указанного в п.1 способа в робототехнических системах, при этом вычислительное устройство может генерировать управляющие сигналы для приведения в действие роботизированных рук, захватов или ног, а в качестве исполнительных устройств могут применяться двигатели или сервоприводы, которые приводят в движение компоненты робота, в качестве датчиков могут использоваться. энкодеры, камеры или датчики силы, при помощи которых измеряют производительность и положения компонентов робототехнической системы, а результатом применения способа является обучение вычислительного устройства генерации более качественных управляющих сигналов управления двигателем для повышения точности, скорости или энергоэффективности.
В частном варианте реализации описываемого решения, осуществляется применение указанного в п.1 способа в автономных транспортных средствах, при этом вычислительное устройство может генерировать управляющие сигналы для рулевого управления, ускорения и торможения, в качестве исполнительных устройств могут использоваться электродвигатели, гидравлические системы или другие механизмы, управляющие движением транспортного средства, в качестве датчиков могут использоваться камеры, гироскопы, акселерометры, LIDAR и GPS, которые используются для сбора данных о положении транспортного средства и его окружении, а результатом применения способа является обучение вычислительного устройства генерации более качественных управляющих сигналов для безопасного и эффективного вождения в различных условиях.
ОПИСАНИЕ ЧЕРТЕЖЕЙ
Реализация изобретения будет описана в дальнейшем в соответствии с прилагаемыми чертежами, которые представлены для пояснения сути изобретения и никоим образом не ограничивают область изобретения. К заявке прилагаются следующие чертежи:
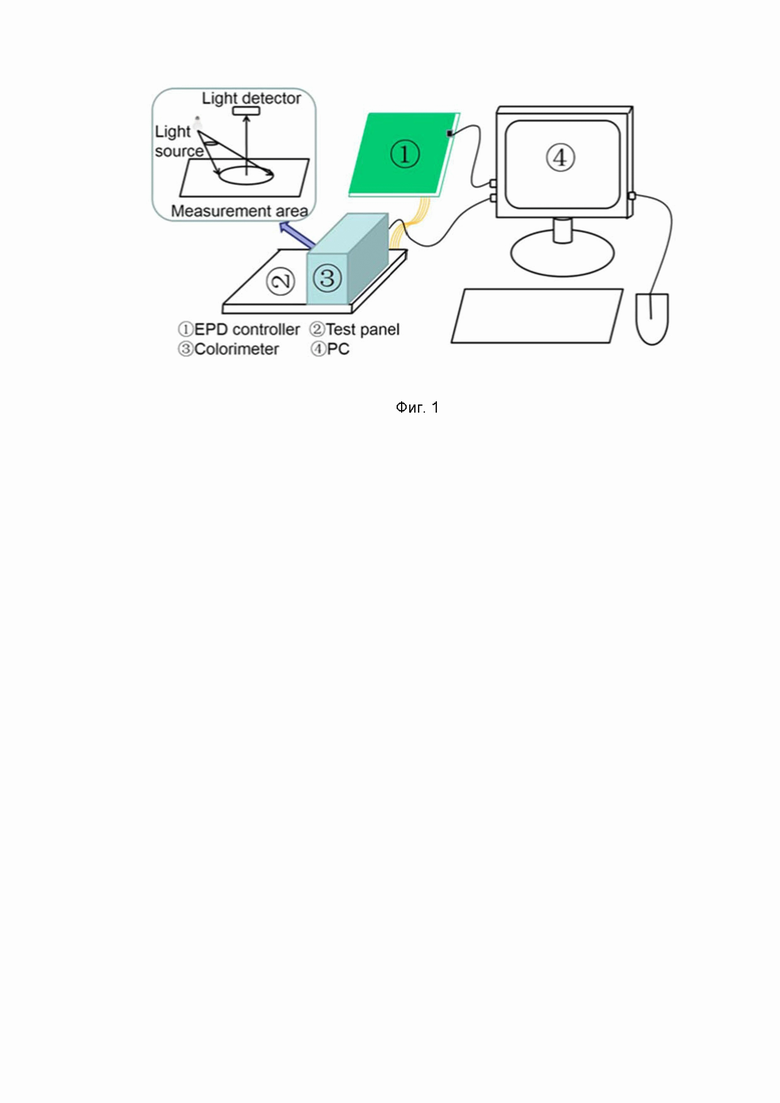
Фиг. 1, иллюстрирует пример реализации способа подбора последовательности сигналов для отображения изображения на дисплее на основе электронных чернил.
ДЕТАЛЬНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
В приведенном ниже подробном описании реализации изобретения приведены многочисленные детали реализации, призванные обеспечить отчетливое понимание настоящего изобретения. Однако, квалифицированному в предметной области специалисту, будет очевидно каким образом можно использовать настоящее изобретение, как с данными деталями реализации, так и без них. В других случаях хорошо известные методы, процедуры и компоненты не были описаны подробно, чтобы не затруднять излишне понимание особенностей настоящего изобретения.
Кроме того, из приведенного изложения будет ясно, что изобретение не ограничивается приведенной реализацией. Многочисленные возможные модификации, изменения, вариации и замены, сохраняющие суть и форму настоящего изобретения, будут очевидными для квалифицированных в предметной области специалистов.
Настоящее техническое решение за счет своей реализации обеспечивает качественный и эффективный подбор последовательности сигналов (вейвформ) для отображения изображения на дисплее на основе электронных чернил ).
Дисплей на основе электронных чернил состоит из тонкого слоя “колбочек”, в которых расположены черные и белые частицы. Черные и белые частицы имеют электрический заряд (например, черные - положительно-заряженные, а белые - отрицательно заряженные).
Под слоем “колбочек” расположена подложка, которая способна передавать положительный или отрицательный заряд.
Таким образом, если, например, подложку зарядить положительным зарядом, то белые частицы к ней притянутся, а черные - оттолкнутся. И, следовательно, для зрителя цвет дисплея станет черным.
Таким образом, посылая на каждый пиксель (капсулу) определенный заряд, можно получать стабильные во времени изменения в цвете такого пикселя, т.к. статически заряженные частицы стабильно сохраняют своё положение на протяжении длительного периода времени, что является главной особенностью всех EPD дисплеев -- энергонезависимость отображенной на дисплее графики.
Для получения оттенков серого, необходимо передать заряд таким образом, чтобы черные и белые частицы смешались в определенной пропорции. Это достигается путем передачи сложной последовательности электрических импульсов на электрод капсулы. Такая последовательность импульсов называется вейвформой.
Для 16-цветного дисплея (дисплея с 16 оттенками серого), для перехода из каждого цвета в каждый подобрана определенная вейвформа.
Например, для перехода из цвета 4 в цвет 9 - одна вейвформа;
Для перехода из цвета 11 в цвет 2 - другая вейвформа. Таким образом все цветовые переходы можно рассматривать как сочетания нетранзитивных пар переходов от цвета к цвету внутри набора из 16 цветов.
Всего таких вейвформ получается (16! / (2! * (16-2)!)) x 2 = 240.
Более того, инертность белых и черных частичек зависит от температуры дисплея, которая зависит от многих факторов, главным образом от температуры окружающей среды. Температура также существенно влияет на вязкостные свойства жидкости, в которой плавают частицы.
Таким образом, для корректной работы дисплея, необходимо, чтобы для каждого небольшого изменения температуры дисплея, был собственный набор из 256 вейвформ, который будет максимально достоверно учитывать, как минимум, эти факторы. Как правило поддерживаются температуры от 10 до 30 градусов, с шагом 2 градуса. Следовательно, для корректной работы дисплея, на основе электронных чернил, необходимо подобрать порядка (30-10)/2*240 = 2400 вейвформ.
Дополнительным фактором, усложняющим управление дисплеем, является взаимное влияние статического заряда частиц в капсуле на частицы в соседних капсулах, когда заряд сообщенный частицам в одной капсуле вызывает движение частиц в соседней капсуле.
Также необходимо отметить, что вследствие погрешностей физических процессов при производстве дисплеев, физические характеристики всегда немного отличаются от партии к партии.
Таким образом, для каждой новой партии необходима специфическая “донастройка” вейвформ для конкретно взятой партии.
Подбор таких вейвформ - сложная задача, требующая больших ресурсов.
Для упрощения задачи, по подбору вейвформ, предлагается реализация настоящего технического решения.
Фиг. 1 иллюстрирует способ подбора последовательности сигналов для отображения изображения на дисплее на основе электронных чернил, где:
1 - Контроллер экрана, на основе электронных чернил;
2 - Дисплей, на основе электронных чернил;
3 - Сенсор(устройство для точного определения отображенного на экране цвета, как частный случай колориметр или камеры различных конструкций);
4 - Вычислительное устройство (как частный случай: компьютеры с центральными процессорами различных архитектур, таких как x86, RISC, RISC-V и другие).
Пример реализации настоящего технического решения.
Вычислительное устройство (4), посредством контроллера (1) отправляет на дисплей на основе электронных чернил(2) сгенерированную вейвформу для перехода от текущего цвета к целевому.
Далее посредством сенсора (3), считывает полученный результат.
После этого, если полученный результат отличается от целевого, вычислительное устройство применяет методы машинного обучения для подбора новой вейвформы.
В качестве сенсора могут быть использованы:
Колориметр, как прибор для измерения интенсивности света;
Камера, которая может наблюдать за одним или многими участками экрана одновременно;
Любое устройство, которое измеряет интенсивность света.
Измерение интенсивности света может быть сопряжено с алгоритмами распознавания гостинга. В этом случае точность определения цвета может быть улучшена благодаря знанию о разнице в цвете между соседними областями. Пример такого алгоритма был описан в статье:
[https://www.researchgate.net/publication/346358764_A_Convolutional_Neural_Network_for_Ghost_Image_Recognition_and_Waveform_Design_of_Electrophoretic_Displays]
В отличие от prior-art подходов, методы машинного обучения способны подбирать не только саму вейвформу, но также и другие параметры, такие как количество, частота, амплитуда, подаваемое напряжение, а также полярность импульсов, составляющих вейвформу в их взаимосвязи с друг другом, а также искать новые ранее неизвестные скрытые взаимосвязи между изменениями одних параметров и их взаимного влияния на другие. Это дает преимущество в потенциальном качестве и скорости отображения изображения.
Для ускорения работы алгоритма возможно применять разные вейвформы к маленьким участкам экрана. Таким образом, во время работы алгоритмов, шаги 1-3 могут работать одновременно, независимо друг от друга, распараллеливания алгоритм. Также для разных участков экрана параллельно может быть применены разные алгоритмы, работающие по общему описанию 1-3.
Методы машинного обучения могут включать, но не ограничиваются нижеперечисленными:
1. Классическая полносвязная нейронная сеть
Архитектура
Вход нейронной сети (Input Layer) - 3 нейрона:
Текущий цвет (получаемый с колориметра);
Целевой цвет - тот, который должен получиться, после применения сгенерированной вейвформы;
Температура панели (получаемый с термодатчика);
Скрытые слои (Hidden layers) - n слоев шириной от k до l
Выход нейронной сети (output layer) - j нейронов, где j - длина целевой вейвформы.
Каждый выходной нейрон представляет из себя амплитуду. Таким образом последовательность из j нейронов представляет из себя вейвформу.
В качестве функции активации нейронов сети может быть использованы (но не ограничены) следующие функции:
Сигмойдная;
Гиперболического тангенса ;
ReLU.
Обучение нейронной сети проводится следующим образом:
Нейронная сеть получает на вход текущие данные и целевой цвет, используя которых генерирует вейвформу;
Сгенерированная вейвформа применяется к дисплею на основе электронных чернил.
Сенсором считывается полученный цвет. Далее, если имеется разница между целевым цветом и полученным, то веса нейронов нейронной сети обновляются посредством алгоритма обновления весов нейронной сети.
Также при обучении может быть использован один из методов регуляризации нейронной сети.
● Алгоритм обновления нейронной сети может быть одним из следующих (но ими не ограничивается):
● Backpropagation (http://www.cs.utoronto.ca/~hinton/absps/naturebp.pdf)
● The HSIC Bottleneck (Hilbert-Schmidt Independence Criterion)
● Evolutionary Algorithm (e. g. genetic algorithm)
● Online Alternating Minimization with Auxiliary Variables
● Decoupled Neural Interfaces Using Synthetic Gradients
Алгоритмы регуляризации нейронной сети
В качестве алгоритма регуляризации нейронной сети может быть выбрано:
● L1 Regularization;
● L2 Regularization;
● Dropout.
2. Рекуррентная нейронная сеть
рекуррентная нейронная сеть генерирует последовательность элементов вейвформы, на каждой итерации получая на вход предыдущий элемент и генерируя следующий.
Вход нейронной сети (Input Layer) - 4 нейрона:
● Текущий цвет (получаемый с колориметра);
● Целевой цвет - тот, который должен получиться, после применения сгенерированной вейвформы;
● Температура панели (получаемый с термодатчика);
● Предыдущее значение элемента последовательности.
Скрытые слои (Hidden layers) - последовательность из:
n слоев шириной от k до l;
рекуррентный модуль (или несколько рекуррентных модулей, находящихся на одном слое);
Выход нейронной сети (output layer) - 1 нейрон, представляющий из себя сгенерированный элемент вейвформы. Этот элемент подается на вход рекуррентной нейронной сети, для генерации следующего элемента.
Рекуррентный модуль может представлять из себя один из следующих модулей:
● Классический рекуррентный модуль;
● LSTM (long short-term memory) модуль;
● GRU (Gated Recurrent Unit) модуль.
Обучение нейронной сети проводится следующим образом:
Определяется длина вейвформы (целевое количество элементов, которое необходимо сгенерировать).
В цикле, количество итераций которого равно целевой длине вейвформы, нейронная сеть получает на вход текущие данные и целевой цвет, а также значение элемента вейвформы с предыдущей итерации цикла (на нулевой итерации получает заранее заданную константу, например 0). Таким образом на каждой итерации цикла генерируется следующий элемент вейвформы. К моменту, когда цикл заканчивает работать, мы получаем сгенерированную вейвформу.
Сгенерированная вейвформа применяется к дисплею на основе электронных чернил.
Сенсором считывается полученный цвет. Далее, если имеется разница между целевым цветом и полученным, тогда веса нейронов нейронной сети обновляются посредством алгоритма обновления весов нейронной сети.
Также при обучении может быть использован один из методов регуляризации нейронной сети.
Алгоритм обновления нейронной сети может быть одним из следующих (но ими не ограничивается):
Backpropagation;
The HSIC Bottleneck (Hilbert-Schmidt Independence Criterion);
Evolutionary Algorithm (e. g. genetic algorithm);
Online Alternating Minimization with Auxiliary Variables;
Decoupled Neural Interfaces Using Synthetic Gradients.
Алгоритмы регуляризации нейронной сети
В качестве алгоритма регуляризации нейронной сети может быть выбрано:
L1 Regularization;
L2 Regularization;
Dropout.
Генетический алгоритм. С помощью генетического алгоритма, выводятся множество генотипов, которые посредством механизма скрещивания, мутации и естественного отбора, конкурируют между собой. Генотип и представляет из себя вектор, являющейся вейвформой. Таким образом, после отработки множества поколений, “выводится” поколение генотипов с максимальной эффективностью.
Алгоритм работы:
1. Генерируется популяция из N генотипов длины M, заполненные случайными числами. Генотип и представляет из себя вектор вейвформы.
2. Вейвформы применяются к экрану (для распараллеливания, каждая вейвформа может быть применена к небольшой области экрана).
3. Колориметр считывает значения с полученных областей.
4. Рассчитывается функция приспособленности, которая представляет из себя разницу между целевым и полученным цветом.
5. Из популяции производится селекция n генотипов с наибольшей функцией приспособленности.
6. Среди них производятся скрещивания с коэффициентом скрещивания k и мутации со скоростью мутаций m. Таким образом генерируется новая популяция из N генотипов.
Шаги 1-6 повторяются P раз.
После чего наиболее приспособленный генотип и представляют из себя наиболее оптимальную вейвформу.
В частности, описываемое решение может быть использовано в иных прикладных областях техники:
1. Для создания умных систем калибровки аудиосистем для потребительского и коммерческого применения, которые будут адаптироваться к разным условиям окружающего пространства для улучшения качества звучания и поддержания его стабильности в различных ситуациях.
2. Для интеграции с роботизированными, кибернетическим, биомеханическими манипуляторами и протезами конечностей, в которых за счет корректировки работы сервоприводов, энкодеров будет достигаться прирост полезных характеристик, таких как КПД, энергоэффективность, сила, количество рабочих циклов до износа т.п.
В настоящих материалах заявки было представлено предпочтительное раскрытие осуществление заявленного технического решения, которое не должно использоваться как ограничивающее иные, частные воплощения его реализации, которые не выходят за рамки испрашиваемого объема правовой охраны и являются очевидными для специалистов в соответствующей области техники.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ДЛЯ КОММУНИКАЦИИ ПОЛЬЗОВАТЕЛЕЙ БЕЗ ИСПОЛЬЗОВАНИЯ МЫШЕЧНЫХ ДВИЖЕНИЙ И РЕЧИ | 2018 |
|
RU2725782C2 |
| УСТРОЙСТВО БЕЗОПАСНОСТИ, СПОСОБ И СИСТЕМА ДЛЯ НЕПРЕРЫВНОЙ АУТЕНТИФИКАЦИИ | 2021 |
|
RU2786363C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИСТЕМЫ УПРАВЛЕНИЯ МОЗГ-КОМПЬЮТЕР | 2019 |
|
RU2704497C1 |
| СПОСОБ РАСПОЗНАВАНИЯ ТЕКСТА НА ИЗОБРАЖЕНИЯХ ДОКУМЕНТОВ | 2021 |
|
RU2768544C1 |
| СПОСОБ ИЗМЕНЕНИЯ ИНФОРМАЦИИ НА СТРАНИЦЕ РЕЗУЛЬТАТОВ ПОИСКА И СПОСОБ ВЫПОЛНЕНИЯ ОПЕРАЦИЙ НАД ФРАГМЕНТАМИ ТЕКСТА | 2019 |
|
RU2708213C1 |
| СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ ВНЕШНИМИ УСТРОЙСТВАМИ, ПОСРЕДСТВОМ ЧЕЛОВЕКО-МАШИННОГО ИНТЕРФЕЙСА | 2024 |
|
RU2840380C1 |
| УСТРОЙСТВО АНАЛИЗА БРОНХОФОНОГРАММ | 2013 |
|
RU2574713C2 |
| ИНТЕРАКТИВНОЕ ЭЛЕКТРОННОЕ УСТРОЙСТВО И СПОСОБ ВЗАИМОДЕЙСТВИЯ С НИМ | 2022 |
|
RU2815183C2 |
| СПОСОБ ОЦЕНКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ЖАРОВЫХ ТРУБ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2020 |
|
RU2757532C1 |
| ДЕТЕКТИРОВАНИЕ И ИДЕНТИФИКАЦИЯ ОБЪЕКТОВ НА ИЗОБРАЖЕНИЯХ | 2020 |
|
RU2726185C1 |
Изобретение относится к области вычислительной техники. Технический результат заключается в повышении скорости управления исполнительным устройством. Технический результат достигается за счет этапов, на которых: в случае, если полученное состояние исполнительного устройства отличается от целевого, вычислительное устройство осуществляет вычисление нового сигнала, а именно: нейронная сеть, связанная с вычислительным устройством, получает на вход текущее и целевое состояние исполнительного устройства и вычисляет параметры нового сигнала; вычисленный сигнал отправляется на исполнительное устройство; датчиком считывается полученное состояние исполнительного устройства и передается на ввод вычислительного устройства; далее, если имеется разница между ожидаемым состоянием и полученным состоянием исполнительного устройства, веса нейронов нейронной сети обновляются посредством алгоритма обновления весов нейронной сети; нейронная сеть после обновления весов вычисляет новые параметры сигнала, и запускается новый цикл управления с отправкой сигнала на исполнительное устройство. 12 н. и 11 з.п. ф-лы, 1 ил.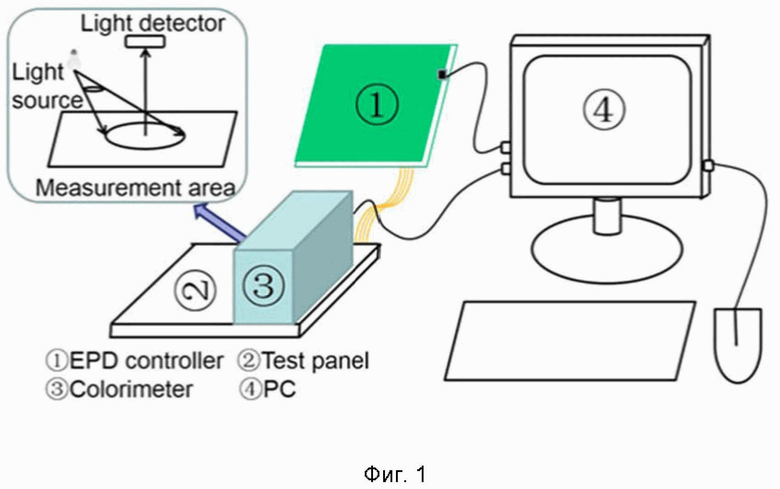
1. Способ подбора последовательности сигналов для управления исполнительным устройством, содержащий этапы, на которых:
a) вычислительное устройство (4) посредством контроллера (1) генерирует управляющий сигнал для перехода исполнительного устройства (2) от текущего состояния к ожидаемому состоянию;
b) вычислительное устройство (4) посредством контроллера (1) отправляет сгенерированный управляющий сигнал на исполнительное устройство (2) для перехода исполнительного устройства (2) от текущего состояния к ожидаемому состоянию;
c) датчик (3) регистрирует полученное в результате обработки управляющего сигнала состояние исполнительного устройства (2);
d) полученные от датчика (3) данные о состоянии исполнительного устройства (2) передаются в вычислительное устройство (4);
e) в случае, если полученное состояние исполнительного устройства (2) отличается от целевого, вычислительное устройство (4) осуществляет вычисление нового сигнала, а именно:
i) нейронная сеть, связанная с вычислительным устройством (4), получает на вход текущее и целевое состояние исполнительного устройства (2) и вычисляет параметры нового сигнала;
ii) вычисленный сигнал отправляется на исполнительное устройство (2);
iii) датчиком (3) считывается полученное состояние исполнительного устройства (2) и передается на ввод вычислительного устройства (4);
iv) далее, если имеется разница между ожидаемым состоянием и полученным состоянием исполнительного устройства (4), веса нейронов нейронной сети обновляются посредством алгоритма обновления весов нейронной сети;
v) нейронная сеть после обновления весов вычисляет новые параметры сигнала, и запускается новый цикл управления с отправкой сигнала на исполнительное устройство (2).
2. Способ по п. 1, в котором в качестве датчика устройства или нескольких устройств применяется датчик или группа датчиков, считывающих состояние нескольких областей исполнительного устройства одновременно.
3. Способ по п. 1, отличающийся тем, что выполняют одновременное считывание по меньше мере одного или нескольких участков исполнительного устройства (2).
4. Устройство для реализации способа по п. 1, в котором исполнительное устройство (2) представлено экраном (дисплеем).
5. Способ по п. 1, в котором контроллер (1) и датчик (3), а также нейронная сеть реализованы в составе вычислительного устройства (4) и имеют программно-аппаратное исполнение.
6. Способ по п. 1, применяемый для поиска и записи параметров вейвформ для управления дисплеями (экранами), работающими на явлении электрофореза.
7. Устройство для реализации способа по п. 1, в котором исполнительное устройство (2) представлено экраном (дисплеем), а датчик (3) представлен прибором для регистрации изображения.
8. Устройство для реализации способа по п. 1, в котором исполнительное устройство (2) представлено экраном (дисплеем), а датчики представлены комбинацией датчиков различного типа, в том числе одним или несколькими приборами машинного зрения, одним или несколькими приборами, регистрирующим температуру поверхности экрана (дисплея).
9. Устройство по п. 4, дополнительно содержащее по меньшей мере один источник света для освещения поверхности экрана (дисплея).
10. Устройство по п. 4, дополнительно содержащее по меньшей мере одну рассеивающую камеру (лайт-бокс) для стабилизации условий освещения.
11. Устройство по п. 4, дополнительно содержащее по меньшей мере один датчик освещения для калибровки уровней освещенности и контроля стабильности результатов работы устройства.
12. Устройство по п. 4, имеющее корпусное, или бескорпусное, или настольное, или мобильное, или стационарное исполнение в зависимости от требований конечного пользователя и (или) условий использования.
13. Устройство по п. 4, оснащенное интегрированным вычислительным блоком для автономной работы без подключения к другим вычислительным системам.
14. Устройство по п. 4, не имеющее интегрированного вычислительного блока и управляемое внешним вычислительным устройством по проводному или беспроводному каналу связи.
15. Устройство по п. 4, имеющее по меньше мере одно место для размещения и подсоединения одного или нескольких экранов (дисплеев), работающих на явлении электрофореза, причем дисплеи подсоединяются к устройству через различные стандартные физические коннекторы типа FPC, SlimPort, MHL, FFC и прочие, при этом конкретный способ присоединения дисплеев зависит от стандарта, используемого на самом дисплее, при этом устройство может поддерживать сразу несколько стандартов для подсоединения широкой номенклатуры дисплеев разных стандартов.
16. Устройство, реализующее способ по п. 1, предназначенное для поиска вейвформ для дисплеев (экранов), работающих на явлении электрофореза (экран/дисплей на электронных чернилах, EPD, e-ink экран/дисплей), определения комбинаций вейвформ с новыми свойствами, улучшающими характеристики изображений, выводимых с помощью таких усовершенствованных вейвформ.
17. Применение указанного в п. 1 способа для калибровки и повышения качества изображения информации на любых дисплеях и средствах отображения, способных отображать визуальную информацию согласно заданным параметрам, в том числе таких как жидкокристаллические дисплеи, дисплеи на органических диодах, механические, электромеханические, фотонно-кристаллические, а также иные прочие, где с помощью описанной последовательности действий достигается максимальное соответствие между выводимым изображением и фактическим изображением, полученным на устройстве отображения.
18. Применение указанного в п. 1 способа для калибровки и повышения качества воспроизведения в аудио-системах любых типов, причем вычислительное устройство может быть представлено цифро-аналоговым преобразователем, датчик может быть представлен одним или несколькими микрофонами, исполнительное устройство может быть представлено звуковым усилителем с источниками звука, которые адаптируются к акустическим свойствам помещений и окружающих предметов, минимизируя негативные акустические свойства таких помещений и предметов, учитывая фактические переотражения звука и способность к звукопоглощению при цифроаналоговом преобразовании звука для достижения максимальной достоверности звучания.
19. Применение указанного в п. 1 способа в системах управления роботизированными устройствами, дистанционно управляемыми и (или) беспилотными техническими средствами, заключающееся в том, что в качестве вычислительного устройства используют контроллер или блок управления техническим средством, в качестве исполнительного устройства используют силовую установку (например, двигательные установки) и исполнительные органы управления (например, поворотные механизмы, отклоняемые аэродинамические поверхности), а в качестве датчиков - гироскоп, акселерометр, лидар, приемник сигнала спутниковой навигации, радиовысотомер, при помощи которых определяют положение, ориентацию и скорость технического средства, а результатом применения способа является обучение вычислительного устройства генерации более качественных управляющих сигналов для стабильного выполнения задания и более точного маневрирования.
20. Применение указанного в п. 1 способа в интеллектуальных системах отопления, вентиляции, кондиционирования (HVAC), при этом вычислительное устройство может генерировать управляющие сигналы для систем кондиционирования, отопления или вентиляции, а в качестве исполнительных устройств применяют вентиляторы, заслонки или клапаны, которые регулируют поток воздуха и температуру, а в качестве датчиков применяют, например, датчики температуры и датчики влажности, которые используются для мониторинга условий окружающей среды, а результатом применения способа является обучение вычислительного устройства генерации более качественных управляющих сигналов для повышения энергоэффективности и поддержания оптимальных условий отопления, вентиляции или кондиционирования.
21. Применение указанного в п. 1 способа в интеллектуальных моторизованных протезах конечностей, при этом вычислительное устройство может генерировать управляющие сигналы для движения элементов протезов, в качестве исполнительных устройств применяются, например, двигатели или другие механизмы, управляющие движением протеза, в качестве датчиков могут применяться мышечные датчики, датчики силы или энкодеры, используемые для сбора данных о командах пользователя и о состояниях двигаемых элементов протеза и конечности в целом, а результатом применения способа является обучение вычислительного устройства генерации более качественных управляющих сигналов для более естественного и интуитивно понятного управления протезами.
22. Применение указанного в п. 1 способа в робототехнических системах, при этом вычислительное устройство может генерировать управляющие сигналы для приведения в действие роботизированных рук, захватов или ног, а в качестве исполнительных устройств могут применяться двигатели или сервоприводы, которые приводят в движение компоненты робота, в качестве датчиков могут использоваться энкодеры, камеры или датчики силы, при помощи которых измеряют производительность и положения компонентов робототехнической системы, а результатом применения способа является обучение вычислительного устройства генерации более качественных управляющих сигналов управления двигателем для повышения точности, скорости или энергоэффективности.
23. Применение указанного в п. 1 способа в автономных транспортных средствах, при этом вычислительное устройство может генерировать управляющие сигналы для рулевого управления, ускорения и торможения, в качестве исполнительных устройств могут использоваться электродвигатели, гидравлические системы или другие механизмы, управляющие движением транспортного средства, в качестве датчиков могут использоваться камеры, гироскопы, акселерометры, LIDAR и GPS, которые используются для сбора данных о положении транспортного средства и его окружении, а результатом применения способа является обучение вычислительного устройства генерации более качественных управляющих сигналов для безопасного и эффективного вождения в различных условиях.
| СПОСОБ ОЧИСТКИ УЛЬТРАДИСПЕРСНЫХ АЛМАЗОВ | 1991 |
|
RU2077476C1 |
| Способ получения продуктов конденсации фенолов с формальдегидом | 1924 |
|
SU2022A1 |
| Способ регенерирования сульфо-кислот, употребленных при гидролизе жиров | 1924 |
|
SU2021A1 |
| Способ получения продуктов конденсации фенолов с формальдегидом | 1924 |
|
SU2022A1 |
| ЦИФРОВОЕ УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ПОСЛЕДОВАТЕЛЬНОСТЕЙ УПРАВЛЯЮЩИХ СИГНАЛОВ | 2008 |
|
RU2397610C2 |

