Изобретение относится к области авиации, в частности к способу управления дирижаблем.
Существующий уровень техники
Существуют дирижабли классической сигарообразной формы с поперечным сечением в виде круга или овала. Дирижабли имеют различные конструкции, такие как: нежесткий дирижабль, состоящий из оболочки, форма которой поддерживается за счет содержащегося в ней подъемного газа; полужесткий дирижабль, состоящий из силовой килевой балки и скрепленной с ней оболочки, форма которой поддерживается за счет содержащегося в ней подъемного газа; жесткий дирижабль, состоящий из каркаса, покрытого оболочкой, поддерживающего внешнюю форму и несущего все тяжелые элементы и полезную нагрузку, например, гондолу и винтомоторную установку, подъемный газ содержится в одном или более газовых мешках.
Современные летающие дирижабли, построенные до 2013 года, имеют классическую форму, небольшой объем (до 10 тыс. м3) и способны нести незначительную полезную нагрузку (до 2 тонн). В основном они предназначены для инспекции, туризма, рекламы. Сколько-нибудь серьезные транспортные задачи для них непосильны.
Классические дирижабли осуществляют швартовку к причальной мачте, имеют хвостовое оперение как неотъемлемый элемент управления, которое служит для управления положением дирижабля в потоке при его движении или для ориентации по потоку, когда дирижабль находится у причальной мачты. При боковом порыве ветра поток воздуха воздействует на хвостовое оперение. На нём появляется подьёмная сила, направленная перпендикулярно потоку, и сила сопротивления, которая дополнительно нагружает мачту. Результат такого ветрового воздействия – это разворот дирижабля и смещение его кабины от первоначального положения. Если при этом шла погрузка, то погрузчикам нужно переехать в другое место. По этой причине швартовочная площадка должна быть как минимум в два раза больше самого дирижабля.
Проблема маневренности дирижабля усугубляется с ростом грузоподьёмности, а значит и размеров дирижабля. Момент инерции относительно центра тяжести дирижабля растёт в кубической зависимости от его линейных размеров, и если для линейного перемещения, вдоль своей основной оси, дирижаблю требуется винтомоторная установка с тягой в 4-5 раз меньше, чем для самолёта такой же грузоподъемности, то для активных манёвров по развороту дирижабля по курсу и тангажу тяги этих установок недостаточно. Эта проблема усугубляется при размещении установки классическим способом вблизи продольной оси дирижабля. И это не раз служило причиной аварий дирижаблей. Поэтому классический дирижабль не может быстрым манёвром уйти от столкновения с препятствием, и, с другой стороны, не может быстро повернуться носом к боковому порыву ветра, что также может привести к сильному сносу и аварии.
Намного сложнее и значительнее силовое воздействие потока воздуха, создающееся в результате полета дирижабля при неблагоприятной погоде и высокой атмосферной турбулентности. Кроме горизонтальных сдвигов ветра присутствуют также восходящие и нисходящие потоки, которые по-разному могут воздействовать на носовую и кормовую часть дирижабля. Поэтому для выработки управляющих воздействий нужно знать не только общее направление ветра, но и непосредственное силовое воздействие потока воздуха на оболочку что и реализуется данным изобретением.
Известно изобретение US 7264202, в котором предлагается оснастить дирижабль циклическими движителями, расположенными по трём основным осям дирижабля. Циклические движители выдают высокую статическую тягу с одной стороны, и с другой стороны вектор тяги может быть быстро направлен в любую сторону.
Однако в изобретении не указывается, по каким критериям должна осуществляться ориентация дирижабля на стоянке или в полёте. Кроме того, оно имеет три циклических движителя, расположенных перпендикулярно основной оси дирижабля, и по одному на носу и корме с осью параллельной оси дирижабля, такое расположение вполне эффективно для движения на скоростях до 10 м/с и при невысоких скоростях маневрирования. Но с увеличением скорости движения энергоэффективность циклических движителей стоящих поперёк потока сильно снижается, по сравнению с пропеллерами, что ухудшает экономические показатели дирижабля. Расположенные далеко от центра тяжести носовой и кормовой циклический движитель так же ухудшают свою эффективность из-за высокой поступательной скорости при повороте дирижабля вокруг вертикальной оси.
Известен патент FR 3036475, в котором решали проблему выработки критериев управления дирижаблем, разместив на нём датчик, определяющий направление ветра, связав его с системой, вырабатывающей управляющие воздействия на рули стабилизаторов и винтомоторные установки. Однако, в изобретении не учитывается, что в силу больших размеров дирижабля, он может оказаться в условиях обтекания, где на разной высоте ветер имеет разную силу и даже разное направление, поэтому выработка адекватного управляющего воздействия с такой системой диагностики затруднительна.
Кроме этого в условиях крупномасштабной приземной турбулентности само наличие хвостового оперенья может принести дополнительные проблемы. Хвостовое оперение, по сути дела - крыло, имеет узкий диапазон атаки, эффективно работает, как стабилизатор при отклонении в 20 градусов в любую сторону.
В ситуации возникновения внезапного бокового порыва ветра, оперение окажется под большим углом атаки, с него произойдёт срыв потока, что сильно увеличит общее сопротивление дирижабля и снизит эффективность оперения, как элемента управления. В ситуации, когда оперение работает в пределах своих досрывных углов атаки, при управляющем воздействии оно может создавать силу сопротивления сопоставимую с сопротивлением основного тела дирижабля при его продольном обтекании. Это также снижает энергоэффективность дирижабля, как транспортной системы.
Технический результат, на достижение которого направлено изобретение, заключается в обеспечении стабилизации дирижабля без хвостового оперения, повышении безопасности полета и снижении энергетических затрат при перемещении в заданном направлении.
Поставленная техническая задача решается тем, что в способе стабилизации дирижабля без хвостового оперения при котором: ставят дирижабль продольной осью строго против средней скорости потока; определяют силовое воздействие и динамику изменения этого воздействия на оболочку дирижабля со стороны воздушного потока с помощью по меньшей мере 22 датчиков давления, расположенных по меньшей мере по пять штук вдоль по меньшей мере четырех мериодиональных линий через 90 градусов относительно оси дирижабля; подают данные о распределении давления на обшивке дирижабля в компьютер; вырабатывают при помощи программного обеспечения необходимые алгоритмы управляющих импульсов, и коррекции продольной оси дирижабля в потоке через четыре поста создания тяги, состоящих из циклических и пропеллерных движителей с осью вращения параллельной оси дирижабля, расположенных параллельно и симметрично его вертикальной плоскости снаружи от обшивки, в промежутке от 30 до 70% по хорде дирижабля.
Поставленная задача достигается также тем, что для увеличения эффективности предлагаемого способа винтовой пропеллер переменного шага и циклический движитель поста создания тяги могут вращаться как совместно, так и отдельно друг от друга.
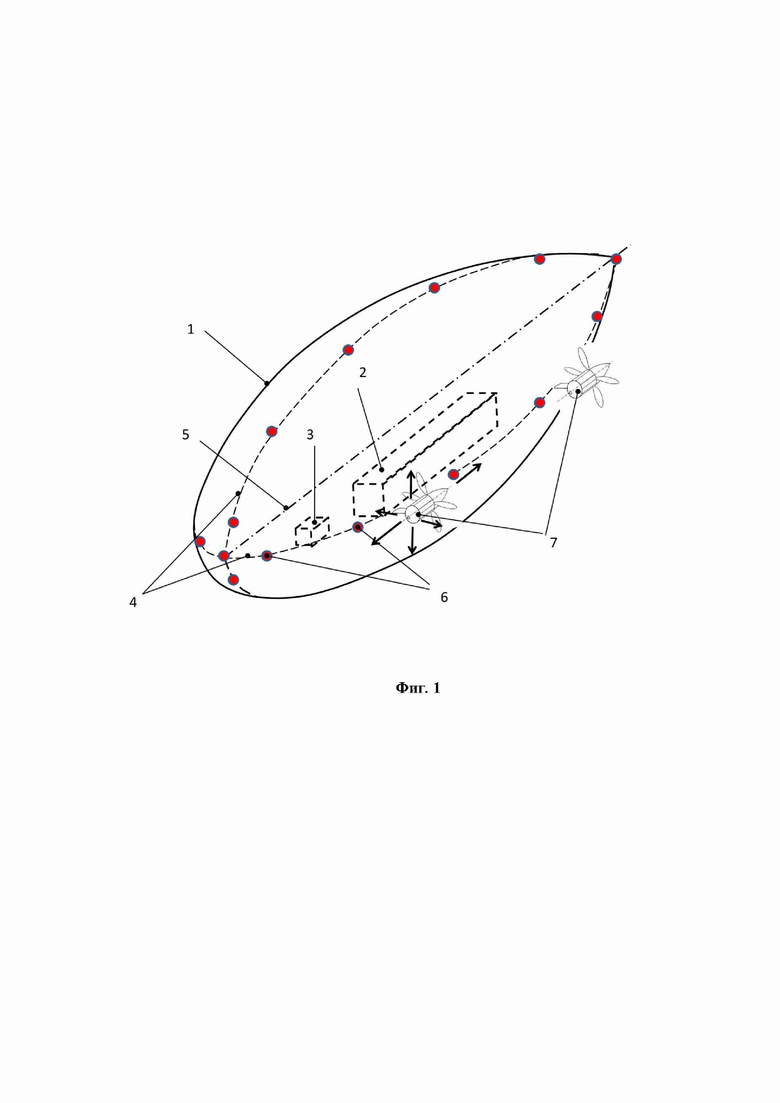
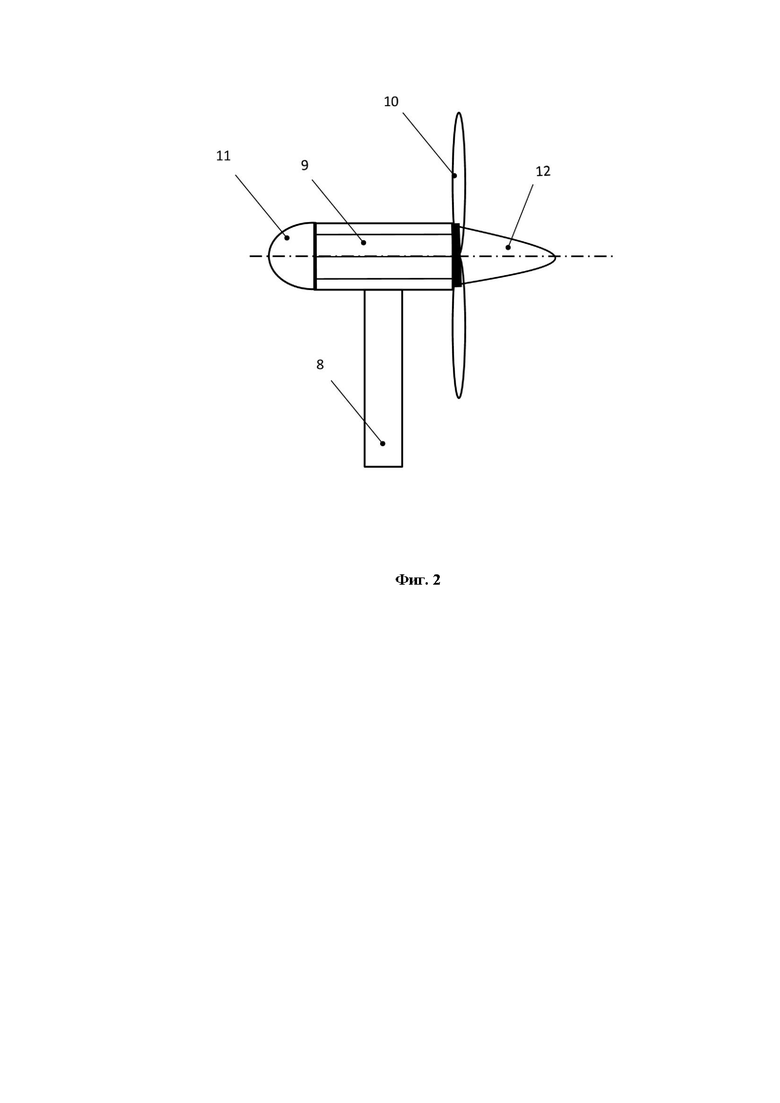
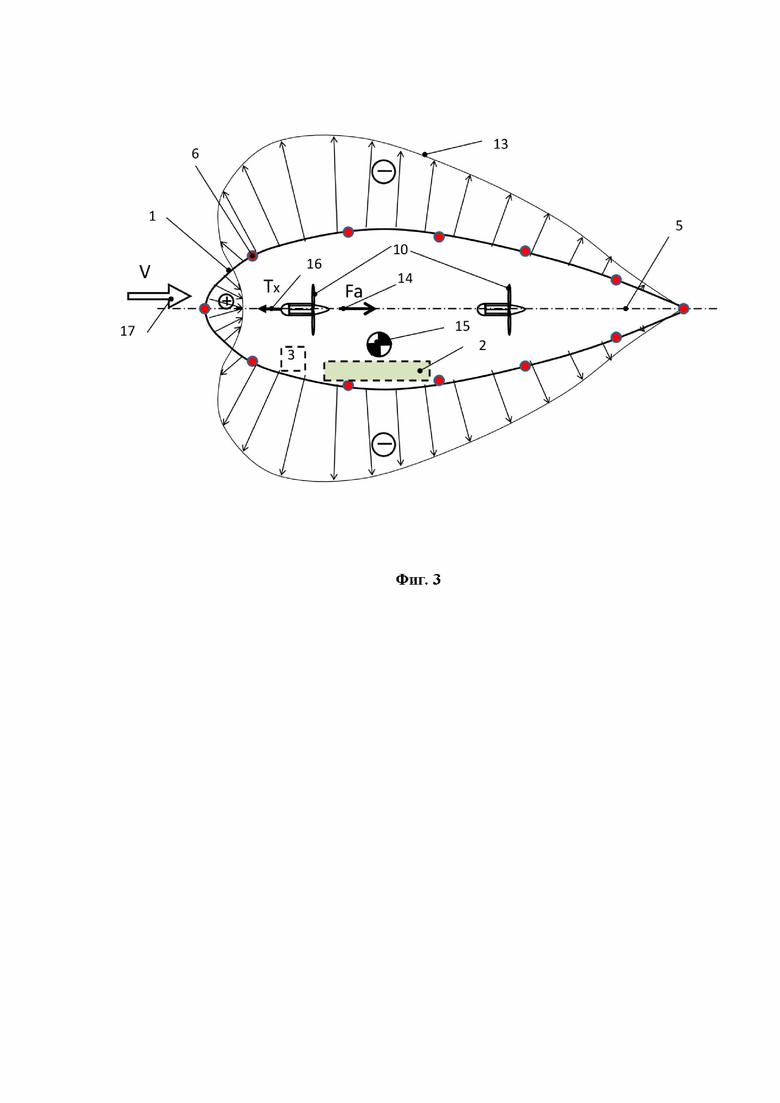
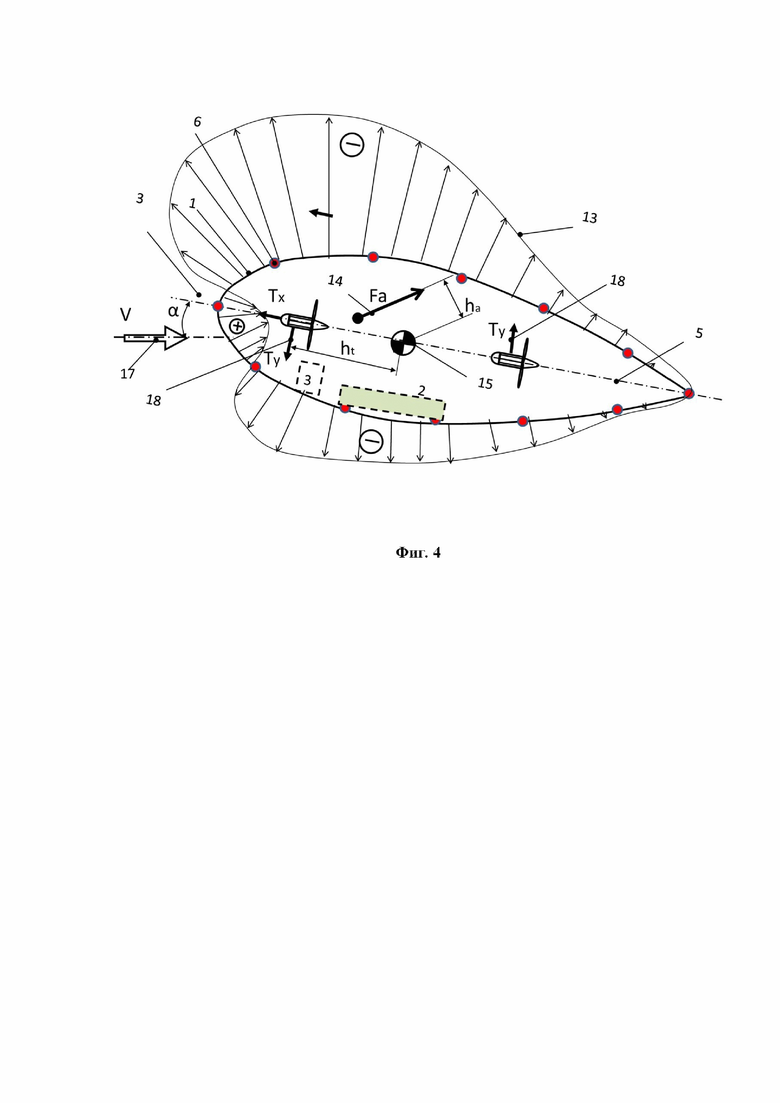
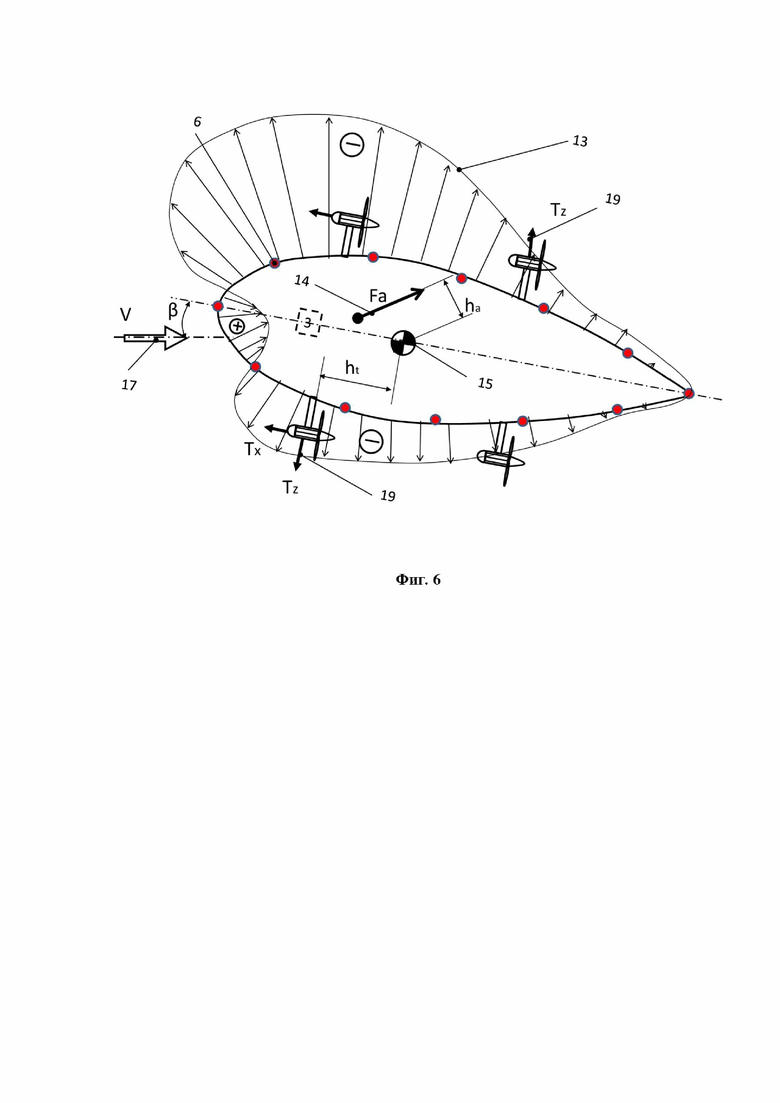
Пример конкретной реализации постов создания тяги и способа стабилизации дирижабля в воздушном потоке представлен на чертежах, где изображены: на Фиг. 1 - общий вид дирижабля с оболочкой сигарообразной формы, с расположенными на нем датчиками и постами создания тяги, на Фиг. 2 – состав поста создания тяги дирижаблем, на Фиг. 3 – дирижабль (вид сбоку) при сбалансированном горизонтальном полёте, на Фиг. 4 – дирижабль (вид сбоку) при отклонении от горизонтального полёта по тангажу, на Фиг. 5 – дирижабль (вид сверху) при сбалансированном горизонтальном полёте, на Фиг. 6 – дирижабль (вид сверху) при отклонении от горизонтального полёта по курсу.
Осуществление способа
Реализация способа управления заключается в следующем. Воздухоплавательный аппарат легче воздуха состоит из сигарообразной жесткой или полужесткой оболочки (1) круглого или овального сечения как у классического дирижабля, с отсеком полезной нагрузки (2), управляющего компьютера (3), внутри оболочки дирижабля (1), меридиональных линий (4), расположенных вдоль оси дирижабля (5), датчиков давления (6), показывающих величину статического давления на обшивке, расположенных на носу, хвосте и равномерно распределенных по обшивке дирижабля через 90 градусов, постов создания тяги (7).Пост создания тяги фиг.2 стойка крепления поста создания тяги к дирижаблю (8), циклического движителя (9) используемого для создания тяги в поперечном направлении на 360°, винтового пропеллера переменного шага (10), создающего тягу в продольном направлении, сохраняющего высокую эффективность на крейсерских скоростях полёта дирижабля от 30 до 40 м/с, переднего обтекателя (11), заднего обтекателя (12). Ось вращения движителей поста создания тяги (7), параллельна оси дирижабля (5) и расположена параллельно его горизонтальной плоскости. Прикреплены посты создания тяги либо непосредственно к обшивке дирижабля, если она жесткая, либо с помощью балок или ферм, связанных с отсеком полезной нагрузки (2) дирижабля, на расстоянии 30-70% по хорде дирижабля.
Изобретение иллюстрируется фиг. 1-6, на которых указаны следующие позиции:
1 Оболочка дирижабля;
2 Отсек полезной нагрузки;
3 Управляющий компьютер;
4 Меридиональные линии
5 Ось дирижабля;
6 Датчик давления;
7 Посты создания тяги;
8 Стойка крепления поста создания тяги к дирижаблю;
9 Циклический движитель;
10 Винтовой пропеллер переменного шага;
11 Передний обтекатель;
12 Задний обтекатель;
13 Эпюра распределения сил давления;
14 Обобщённая аэродинамическая сила Fa;
15 Центр тяжести дирижабля;
16 Горизонтальная тяга Tx;
17 Вектор скорости набегающего потока;
18 Поперечная вертикальная тяга Ty;
19 Поперечная горизонтальная тяга Tz.
Маневренность, безмачтовый взлет и посадка, компенсации боковых порывов ветра по-прежнему остаются важнейшими целями, поэтому задача изобретения - решить эти проблемы.
Предлагается способ стабилизации дирижабля в воздушном потоке жесткой или полужесткой конструкции, без хвостового оперения, при котором осуществляют контроль за положением дирижабля в потоке по объективным критериям, измеряя силовое воздействие на дирижабль со стороны воздушного потока, с целью достижения максимальной энергоэффективности и безопасности.
В этом примере используемый летательный аппарат легче воздуха представляет собой дирижабль, имеющий длину 72 м и объем гелия, равный 8100 м3, с жесткой оболочкой (1) сигарообразной формы круглого сечения, без хвостового оперения. В других вариантах осуществления оболочки могут быть мягкие и полужесткие. Но тогда стойки постов создания тяги связываются с отсеком полезной нагрузки с помощью дополнительных силовых ферм.
В данном примере отсек полезной нагрузки (2) находится внутри дирижабля. На оболочке (1) располагаются 22 датчика давления (6), показывающие величину статического давления на обшивке. Исследования распределения давления на поверхности дирижабля показывают, что оно мало зависит от положения и работы винтов, однако для адекватного построения кривой распределения давления вдоль меридиональной линии нужно знать величину статического давления минимум в 5 точках по меридиональной линии. А также в носу и в хвосте дирижабля, а чтобы определять силовое воздействие на оболочку при углах атаки необходимо проводить измерения минимум по 4 меридиональным линиям, расположенными под углом 90 градусов относительно оси дирижабля, таким образом, число датчиков давления нельзя делать меньше 22. Один датчик располагаются в носу дирижабля второй в хвосте. Остальные датчики распределены равномерно по всей обшивке дирижабля по 5 штук в 4 меридиональных линиях (4), вдоль оси дирижабля, лежащих на обшивке через 90 градусов.
Управление дирижаблем по углу тангажа рассмотрим на следующих примерах фиг. 3 и фиг. 4. Данные с датчиков давления (6) фиг. 3 поступают в бортовой компьютер (3), который по этим данным восстанавливает эпюру распределение сил давления (13) по оболочке дирижабля и определяет общее внешнее воздействие потока на дирижабль, выраженную обобщённой аэродинамической силой Fa (14), определяя её точку приложения направление и модуль относительно центра тяжести (15). В случае установившегося горизонтального полёта эпюра распределения давления (13) имеет симметричный вид (фиг. 3) и этот случай соответствует минимуму сопротивления дирижабля в потоке, обобщённая аэродинамическая сила Fa (14) минимальна и расположена по оси дирижабля. Управляющий компьютер выдаёт команды на создание горизонтальной тяги Tx (16), которая создаётся винтовым пропеллером переменного шага(10). Если ветровое воздействие на дирижабль меняется и возникает угол атаки α между вектором скорости набегающего потока (17) и осью дирижабля (5) (фиг. 4) эпюра распределения давления (13) меняется, что приводит к изменению направления и вектора обобщённой аэродинамической силы Fa. Она увеличивается и начинает создавать дестабилизирующий момент Md, Md= Fa*ha. Компьютер в этом случае выдаёт управляющее воздействие на посты создания тяги (7) и включает циклические движители (9), которые создают поперечную вертикальную тягу Ty (18), тем самым создаётся компенсирующий момент Mc, Mc= Ty*ht. Этот момент поворачивает дирижабль вокруг поперечной горизонтальной оси до тех пор, пока эпюра распределения давления вновь не станет симметричной и обобщённая аэродинамическая сила Fa станет минимальной.
Управление дирижаблем по углу рысканья рассмотрим на следующих примерах. Фиг. 5 - дирижабль (вид сверху) при сбалансированном горизонтальном полёте. Фиг. 6 - дирижабль (вид сверху) при отклонении от горизонтального полёта по курсу. Данные с датчиков давления (6) фиг. 5 поступают в бортовой компьютер (3), который по этим данным восстанавливает эпюру распределения сил давления (13) по оболочке дирижабля и определяет общее внешнее воздействие потока на дирижабль, выраженное обобщённой аэродинамической силой Fa (14), определяя её точку приложения направление и модуль относительно центра тяжести (15). В случае установившегося горизонтального полёта эпюра распределения давления (13) имеет симметричный вид (фиг. 5) и этот случай соответствует минимуму сопротивления дирижабля в потоке, обобщённая аэродинамическая сила Fa (14) минимальна и расположена по оси дирижабля. Управляющий компьютер выдаёт команды на создание горизонтальной тяги Tx(16), которая создаётся винтовым пропеллером (10). Если ветровое воздействие на дирижабль меняется и возникает угол скольжения β между вектором скорости набегающего потока (17) и осью дирижабля (5) (фиг. 6), эпюра распределения давления (13) меняется, что приводит к изменению направления и вектора обобщённой аэродинамической силы Fa. Она увеличивается и начинает создавать дестабилизирующий момент Md, Md= Fa*ha. Компьютер в этом случае выдаёт управляющее воздействие на посты создания тяги (7) и включает циклические движители (9), которые создают поперечную горизонтальную тягу Tz (19). Создаётся компенсирующий момент Mc, Mc= Tz*ht. Этот момент поворачивает дирижабль вокруг поперечной вертикальной оси до тех пор, пока эпюра распределения давления вновь не станет симметричной и обобщённая аэродинамическая сила Fa станет минимальной.
Минимальное количество постов управления составляет четыре штуки. Это необходимо для безопасности в случае выхода одной установки из строя, так как минимальное количество постов, необходимое для такого способа управления, - три штуки. Исходя из общих законов механики известно, что для того, чтобы стабилизировать любое тело или двигать его в любом направлении, необходимо и достаточно 3 точки создания тяги, расположенные в одной плоскости. Поэтому для управления и стабилизации дирижабля без хвостового оперенья необходимо и достаточно 3 поста создания тяги, где вектор и величина тяги может меняться в произвольном направлении. Однако при отказе одного поста дирижабль управление частично теряет. Если устанавливается 4 поста в одной плоскости, то отказ любого из 4 постов не приводит к потере управляемости. Число управляющих постов больше 4 может быть, но влечёт за собой дополнительный вес и энергетические затраты, а надёжность системы является уже избыточной.
| название | год | авторы | номер документа |
|---|---|---|---|
| Беспилотный винтокрыл | 2023 |
|
RU2831846C1 |
| СПОСОБ УПРАВЛЕНИЯ, СТАБИЛИЗАЦИИ И СОЗДАНИЯ ДОПОЛНИТЕЛЬНОЙ ПОДЪЕМНОЙ СИЛЫ ДИРИЖАБЛЯ | 2013 |
|
RU2532448C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С ФЮЗЕЛЯЖЕМ, ВЫПОЛНЕННЫМ ПО СУЩЕСТВУ В ВИДЕ АЭРОСТАТИЧЕСКОГО ПОДЪЕМНОГО ТЕЛА, ДВИГАТЕЛЬНАЯ УСТАНОВКА И СПОСОБ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 1998 |
|
RU2196703C2 |
| ДИРИЖАБЛЬ ЖЕСТКОЙ КОНСТРУКЦИИ | 2013 |
|
RU2518381C1 |
| ТРАНСПОРТНЫЙ ГИБРИДНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2008 |
|
RU2385257C1 |
| ТРАНСПОРТНО-ЭНЕРГЕТИЧЕСКАЯ СИСТЕМА | 2019 |
|
RU2751126C2 |
| САМОЛЕТ КОРОТКОГО ВЗЛЕТА И ПОСАДКИ | 2020 |
|
RU2752104C1 |
| Устройство вертостата с несущим горизонтальным оперением | 2016 |
|
RU2643895C2 |
| Устройство вертостата с автожирным винтом | 2016 |
|
RU2639377C2 |
| СИЛОВАЯ УСТАНОВКА АЭРОСТАТИЧЕСКОГО МОДУЛЯ ТРАНСПОРТНОЙ СИСТЕМЫ | 2021 |
|
RU2796433C2 |

Изобретение относится к области авиации, в частности к способу управления дирижаблем. Способ стабилизации дирижабля без хвостового оперения, при котором ставят дирижабль продольной осью строго против средней скорости потока. Определяют силовое воздействие и динамику изменения этого воздействия на оболочку дирижабля со стороны воздушного потока с помощью по меньшей мере 22 датчиков давления, расположенных по меньшей мере по пять штук вдоль по меньшей мере четырех меридиональных линий через 90 градусов относительно оси дирижабля. Подают данные о распределении давления на обшивке дирижабля в компьютер. Вырабатывают при помощи программного обеспечения необходимые алгоритмы управляющих импульсов и коррекции продольной оси дирижабля в потоке через четыре поста создания тяги, состоящих из циклических и пропеллерных движителей с осью вращения параллельной оси дирижабля, расположенных параллельно и симметрично его вертикальной плоскости снаружи от обшивки, в промежутке от 30 до 70% по хорде дирижабля. Технический результат, на достижение которого направлено изобретение, заключается в обеспечении стабилизации дирижабля без хвостового оперения, повышении безопасности полета и снижении энергетических затрат при перемещении в заданном направлении. 1 з.п. ф-лы, 6 ил.
1. Способ стабилизации дирижабля без хвостового оперения, при котором: ставят дирижабль продольной осью строго против средней скорости потока; определяют силовое воздействие и динамику изменения этого воздействия на оболочку дирижабля со стороны воздушного потока с помощью по меньшей мере 22 датчиков давления, расположенных по меньшей мере по пять штук вдоль по меньшей мере четырех меридиональных линий через 90 градусов относительно оси дирижабля; подают данные о распределении давления на обшивке дирижабля в компьютер; вырабатывают при помощи программного обеспечения необходимые алгоритмы управляющих импульсов и коррекции продольной оси дирижабля в потоке через четыре поста создания тяги, состоящих из циклических и пропеллерных движителей с осью вращения параллельной оси дирижабля, расположенных параллельно и симметрично его вертикальной плоскости снаружи от обшивки, в промежутке от 30 до 70% по хорде дирижабля.
2. Способ стабилизации дирижабля по п. 1, отличающийся тем, что винтовой пропеллер переменного шага и циклический движитель поста создания тяги могут вращаться как совместно, так и отдельно друг от друга.
| КООРДИНАТНЫЙ СТОЛ С ПРОГРАММНЫМ УПРАВЛЕНИЕМ | 1966 |
|
SU215285A1 |
| US 1750141 A, 11.03.1930 | |||
| СПОСОБ УПРАВЛЕНИЯ, СТАБИЛИЗАЦИИ И СОЗДАНИЯ ДОПОЛНИТЕЛЬНОЙ ПОДЪЕМНОЙ СИЛЫ ДИРИЖАБЛЯ | 2013 |
|
RU2532448C1 |
| CN 106483967 A, 08.03.2017. | |||

