Сущность: Конструкция предлагаемого беспилотного винтокрыла состоит из фюзеляжа, оперения, шасси, поперечно расположенных несущих винтов, крыла и отдельного пропульсивного маршевого движителя. Движение с поступательной горизонтальной скоростью обеспечивается только за счет пропульсивной силы, создаваемой маршевым движителем, несущие винты имеют низкую, около 150 м/с, окружную скорость концов лопастей, основная часть подъемной силы в горизонтальном полете, около 80%, создается крылом, а винты дополняют оставшуюся подъемную силу, около 20%, и выполняют функцию элеронов для управления по крену, а на малых скоростях при взлёте и приземлении используются еще и для управления по тангажу и курсу. Привод несущих винтов осуществляется силовой установкой, расположенной в фюзеляже посредством трансмиссионных валов, проходящих внутри крыла и угловых редукторов, расположенных в гондолах на окончаниях крыла. Маршевый движитель имеет электрический привод, для питания которого в составе силовой установки летательного аппарата имеются генератор, приводимый силовой установкой, и буферная аккумуляторная батарея. Использование электрического привода маршевого движителя позволяет без значительного усложнения бортового оборудования по величинам силы тока и напряжения в цепи его питания оценивать затраты мощности на создание пропульсивной силы, а зная общую мощность на борту, её распределение между винтами с вертикальной осью вращения и маршевым.
Изобретение относится к области авиации, в частности к конструкциям винтокрылов.
Известна полезная модель RU 168554 U1. Скоростной комбинированный вертолёт - винтокрыл, имеющий комбинированную несущую систему, состоящую из соосного несущего винта и планера с горизонтальным и вертикальным оперением с управляемыми поверхностями, силовую установку, состоящую из трансмиссии (редукторов и валов) и двигателя, убираемое в полёте шасси, снабжен крылом, расположенным позади оси вала соосного несущего винта, оборудованным управляемыми закрылками, элевонами и отклоняемыми консолями и не менее чем одним двигателем, выполненным комбинированным и обеспечивающим как создание пропульсивной реактивной тяги посредством хвостового сопла на всех эксплуатационных режимах полета, так и привод с возможностью изменения частоты вращения соосного несущего винта, при этом горизонтальное управляемое оперение расположено впереди оси вала соосного несущего винта, а вертикальное оперение установлено на крыле.
Недостатком такой конструкции является значительная площадь крыла, оперения и фюзеляжа, в которую упирается отбрасываемый винтами поток, снижая эффективность несущей системы при взлёте и посадке.
Известен патент RU 2568517 C1. Многовинтовой конвертируемый скоростной вертолёт (МКСВ) содержит двигатели с задним выводом вала для отбора взлетной их мощности, установленные в гондолах перед задним крылом на верхней части фюзеляжа, трехопорное шасси. МКСВ выполнен по двухбалочной схеме и концепции разнесенного расположения на консолях тандемных крыльев и на конце фюзеляжа пятивинтовой системы с распределенной тягой разновеликих винтов (РТРВ), выполненной по схеме РТРВ-X3+2, имеющей три больших винта на концах переднего крыла и тонкой хвостовой балке, соответственно, два передних винта и один задний, так и с изменяемым вектором тяги два меньших винта на поворотных частях заднего крыла. МКСВ снабжен возможностью преобразования полётной конфигурации с вертолёта пятивинтовой несущей схемы в полетную конфигурацию крылатого автожира или винтокрыла с двухвинтовой движительной системой, создающей меньшими винтами заднего крыла маршевую тягу для скоростного крейсерского полёта, вертикального, так и короткого взлёта в перегрузочном его варианте при вращающихся несущих винтах в режиме авторотации от набегающего потока или на режиме, близком к самовращению от двигателя. Обеспечивается увеличение весовой отдачи, улучшение поперечной и продольной управляемости.
Недостатком такой конструкции является высокая сложность трансмиссии, конструкции планера, механической системы управления, программного обеспечения для управления аппаратом и наличие нескольких винтов различных геометрических размеров, что делает стоимость такого аппарата очень высокой.
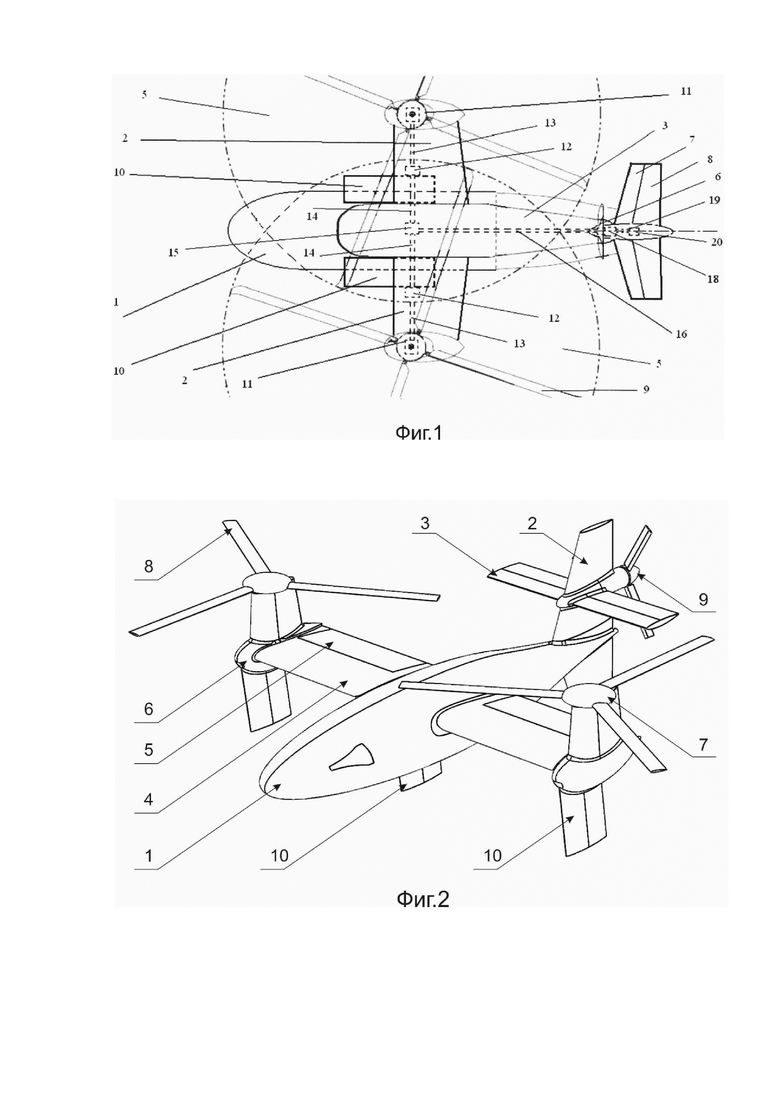
Известна иллюстрация к патенту винтокрыла поперечной схемы с значительным перекрытием несущих винтов, крылом малого удлинения и тянущим винтом (фиг.1).
Недостатками такого варианта, для реализации конструкции в предлагаемой концепции, является то, что всё крыло и значительная часть фюзеляжа препятствуют свободному прохождению отбрасываемого несущими винтами потока, снижая эффективность несущей системы при взлёте и посадке, а крыло малого размаха не позволит создать достаточную подъемную силу в горизонтальном полете.
Винтокрыл, изображенный на схеме (фиг.1) благодаря общей схожести является наиболее близким прототипом к предлагаемому варианту конструкции.
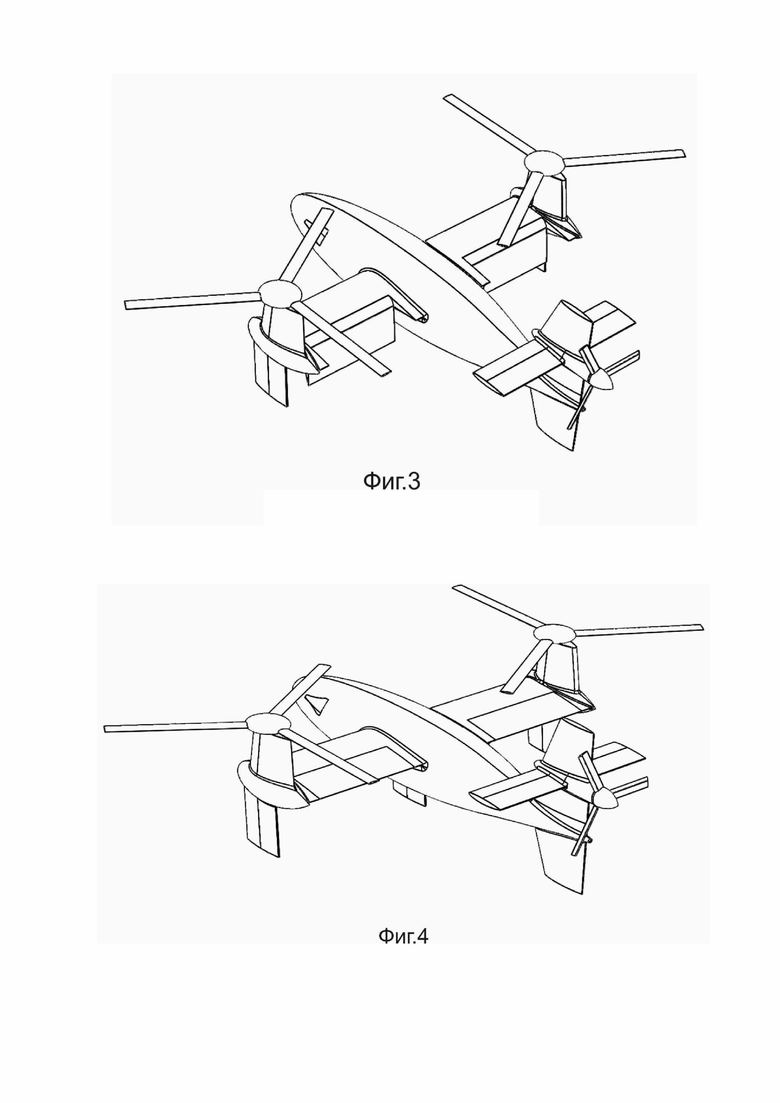
Задачами данного изобретения являются создание аппарата (фиг.2) для исследования пределов высоких горизонтальных скоростей винтокрылом такой схемы, подтверждение оптимальности выбранного соотношения взносов крыла и несущих винтов в создание подъемной силы, необходимой для поддержания устойчивого горизонтального полёта, изучение изменения распределения потребных мощностей для привода несущих и маршевого винтов в зависимости от скорости полёта, исследование законов управления на всех доступных скоростях полёта.
Таким образом, по сравнению с ближайшим аналогом, данное изобретение обладает новизной, причем совокупность отличительных признаков не следует явным для специалиста образом из источников, соответствующих уровню современной техники. Что касается промышленной применимости, то она доказывается приведенным описанием и перспективой использования предлагаемого изобретения в реализуемом проекте. Следовательно, данное изобретение соответствует условиям патентоспособности.
В конструкции предполагается использовать несущие винты с лопастями (фиг.2, поз.8) без крутки и полужестким их креплением, что снизит их аэродинамическое сопротивление в горизонтальном полете. Аппарат будет взлетать и приземляться вертикально с отклоненными вниз на большие углы закрылками (фиг.3) для уменьшения площади обдувки крыла отбрасываемым несущими винтами потоком. Поступательное перемещение вдоль продольной оси аппарата будет происходить благодаря тяге маршевого пропульсивного движителя (фиг.2, поз.9). По мере набора горизонтальной скорости закрылки займут рабочее положение (фиг.4), эффективность крыла аппарата будет увеличиваться, что позволит снижать подъемную силу, генерируемую несущими винтами путем уменьшения их общего шага. Это позволит снизить подаваемую к несущим винтам мощность и уменьшит их аэродинамическое сопротивление. Высвобождаемая мощность будет направляться к пропульсивному движителю для создания наибольшей возможной тяги, разгоняя аппарат до максимальной скорости. Ожидается, что законы управления таким воздушным судном будут существенно проще применяемых на комбинированных вертолётах, и тем более конвертопланах различных схем с поворотными несущими винтами. Исследование на всех режимах полёта перечисленных зависимостей на беспилотном аппарате позволит сравнить их с аналогичными у комбинированных вертолётов других схем и конвертопланов.
На иллюстрациях показано:
фиг.1 - изображение схемы в плане винтокрыла прототипа.
фиг.2 - внешний вид предлагаемого винтокрыла.
фиг.3 - взлётное и посадочной положение закрылков.
фиг.4 - положение закрылков в горизонтальном полёте.
Позиции на рисунках означают:
1. Фюзеляж.
2. Вертикальное оперение.
3. Горизонтальное оперение.
4. Крыло.
5. Закрылки.
6. Гондола угловых редукторов.
7. Обтекатель втулки несущего винта.
8. Лопасть несущего винта.
9. Пропульсивный движитель.
10. Стойки шасси.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЕСПИЛОТНЫЙ ВИНТОКРЫЛ С ПЕРЕКРЕЩИВАЮЩИМИСЯ ВИНТАМИ | 2016 |
|
RU2627963C1 |
| МНОГОВИНТОВОЙ КОНВЕРТИРУЕМЫЙ СКОРОСТНОЙ ВЕРТОЛЕТ | 2014 |
|
RU2568517C1 |
| МНОГОВИНТОВОЙ БЕСПИЛОТНЫЙ СКОРОСТНОЙ ВЕРТОЛЕТ | 2015 |
|
RU2598105C1 |
| МНОГОВИНТОВОЙ БЕСПИЛОТНЫЙ ВИНТОКРЫЛ | 2016 |
|
RU2611480C1 |
| СКОРОСТНОЙ ПРЕОБРАЗУЕМЫЙ ВИНТОКРЫЛ | 2015 |
|
RU2609856C1 |
| БЕСПИЛОТНЫЙ ВЫСОКОСКОРОСТНОЙ ВЕРТОЛЕТ-САМОЛЕТ | 2017 |
|
RU2653953C1 |
| МНОГОВИНТОВОЙ ПРЕОБРАЗУЕМЫЙ СКОРОСТНОЙ ВЕРТОЛЕТ | 2014 |
|
RU2548304C1 |
| БЕСПИЛОТНЫЙ КОМБИНИРОВАННЫЙ ВИНТОКРЫЛ | 2016 |
|
RU2629482C1 |
| СКОРОСТНОЙ ГИБРИДНЫЙ ВИНТОКРЫЛ | 2017 |
|
RU2652868C1 |
| СКОРОСТНОЙ ВЕРТОЛЕТ-САМОЛЕТ-АМФИБИЯ | 2017 |
|
RU2655249C1 |
Изобретение относится к области авиации, в частности к конструкциям комбинированных вертолётов - винтокрылов. Беспилотный винтокрыл с поперечным расположением несущих винтов имеет отдельный маршевый движитель, несущие винты. Движение с поступательной горизонтальной скоростью обеспечивается только за счет пропульсивной силы, создаваемой маршевым движителем. Несущие винты имеют низкую окружную скорость концов лопастей, около 150 м/с. Основная часть подъемной силы в горизонтальном полете, около 80%, создается крылом, а винты дополняют оставшуюся подъемную силу, около 20%, и выполняют функцию элеронов для управления по крену. Обеспечивается создание аппарата для исследования пределов высоких горизонтальных скоростей винтокрылом такой схемы, подтверждение оптимальности выбранного соотношения взносов крыла и несущих винтов в создание подъемной силы, необходимой для поддержания устойчивого горизонтального полёта. 4 ил. 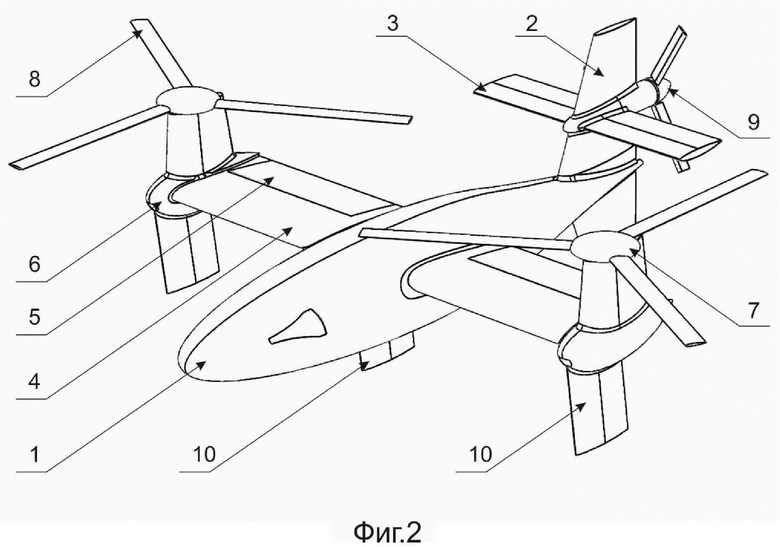
Беспилотный винтокрыл с поперечным расположением несущих винтов и отдельным маршевым движителем, отличающийся тем, что движение с поступательной горизонтальной скоростью обеспечивается только за счет пропульсивной силы, создаваемой маршевым движителем, несущие винты имеют низкую окружную скорость концов лопастей, около 150 м/с, основная часть подъемной силы в горизонтальном полете, около 80%, создается крылом, а винты дополняют оставшуюся подъемную силу, около 20%, выполняют функцию элеронов для управления по крену.
| СПОСОБ ПЕЧАТАНИЯ ЦЕЛЛЮЛОЗНЫХ ВОЛОКНИСТЫХ МАТЕРИАЛОВ | 1966 |
|
SU215197A1 |
| US 20210291970 A1, 23.09.2021 | |||
| СКОРОСТНОЙ ВИНТОКРЫЛ | 2012 |
|
RU2507121C1 |
| WO 2018078388 A1, 03.05.2018 | |||
| ПНЕВМАТИЧЕСКОЕ НОРМАЛЬНО ЗАМКНУТОЕ РЕЛЕ СИГНАЛИЗАЦИИ | 0 |
|
SU168554A1 |
| СКОРОСТНОЙ ТУРБОВЕНТИЛЯТОРНЫЙ ВИНТОКРЫЛ | 2016 |
|
RU2629475C1 |

