Изобретение относится к авиации, в частности к воздухоплаванию, а именно к способу управления, стабилизации и создания дополнительной подъемной силы дирижабля.
Дирижабль входит в класс свободных управляемых аэростатических летательных аппаратов, имеющих корпус, полужесткой или жесткой конструкции. Он снабжен силовой установкой, где в качестве движителей, создающих горизонтальную тягу, могут быть использованы различные типы источников мощности (например, поршневые двигатели (ПД), газотурбинные двигатели (ГТД), электродвигатели (ЭД). Подъемная сила дирижабля может создаваться с применением аэростатической подъемной силы легкого газа (например, гелия), находящегося в его корпусе, подъемной силы нагретого воздуха, заключенного в корпусе наряду с легким газом в специальные термополости внутри корпуса аппарата, аэродинамической подъемной силы, возникающей на несущих поверхностях, а также с помощью тяги воздушных или несущих винтов. Аппарат может иметь аэродинамические поверхности управления. Управление полетом осуществляется с помощью изменения положения рулевых поверхностей, изменения величины и направления тяги воздушных или несущих винтов силовой установки, а также изменением температуры нагретого воздуха внутри аппарата. Используя все четыре перечисленные способа получения подъемной силы в различных комбинациях можно сформировать любую траекторию полета в горизонтальной и вертикальной плоскостях.
Известны способы управления, стабилизации и создания дополнительной подъемной силы дирижабля (Ю.С. Бойко «Воздухоплавание в изобретениях». Москва. Транспорт. 1999 г. Патент ФРГ 1977 г. №26404333. Кл. В64В. Стр.232. Рис.211. Стр.234), в котором для обеспечения эффективного бокового и вертикального управления летательным аппаратом использованы вертолетные движители. Дирижабль снабжен силовыми балками, на концах которых закреплены вертолетные модули с несущими винтами. Каждый модуль может отклоняться вверх на 30° и вниз на 60°, в результате чего обеспечивается необходимая управляемость дирижабля и возможность осуществления полета в широком диапазоне массовых нагрузок.
Недостатком этого способа управления, стабилизации и создания дополнительной подъемной силы является повышенная техническая сложность, обусловленная, во-первых: необходимостью подведения мощности от двигателя к несущему винту через тяжелый, дорогой редуктор и массивный вал несущего винта; во-вторых: наличием автомата перекоса с системой тяг, поводков и шарниров втулки несущего винта; в-третьих: необходимостью поворота всей массы вертолетного модуля на углы больше рабочего диапазона управления автомата перекоса.
В качестве прототипа выбран способ управления, стабилизации и создания дополнительной подъемной силы дирижабля (Ю.С. Бойко «Воздухоплавание в изобретениях». Москва. Транспорт. 1999 г. Патент США 1986 г. №4591112. Кл. 244-26. Стр.281. Рис.261), в котором вертолетные модули, установленные парами по обе стороны от центра тяжести дирижабля, имеют хвостовые балки с винтами. У прототипа передняя пара вертолетных модулей оснащена хвостовыми винтами, которые создают дополнительные моменты по рысканию (как в обычном вертолете), а задняя пара вертолетных модулей оснащена хвостовыми балками с толкающими винтами, которые создают дополнительную маршевую тягу. Отдельных маршевых двигателей с тянущими или толкающими винтами на дирижабле не предусмотрено. Несущие винты управляются изменением циклического и общего шага, что обеспечивает создание ими не только горизонтальной и вертикальной тяг, но и поперечной. Дирижабль становится чрезвычайно маневренным - он может совершать полет вперед, вбок, назад, вниз.
Прототип имеет ряд недостатков, основными из которых являются техническая сложность создания тяги, управляющих и стабилизационных сил, обусловленная:
- необходимостью подведения мощности от двигателя к несущему винту через тяжелый редуктор и массивный вал несущего винта;
- необходимостью организации управляющих сил от автомата перекоса с системой тяг, поводков и шарниров втулки несущего винта;
- необходимостью поворота всей массы вертолетного модуля на углы больше рабочего диапазона управления автомата перекоса с неизбежным запаздыванием управляющих воздействий;
- пониженной надежностью системы, вызванной наличием сложной, разветвленной трансмиссии с большим количеством подвижных соединений и каналов управления;
- зависимостью горизонтальной тяги толкающих хвостовых винтов от режима работы несущих винтов вертолетного модуля, не позволяющей полностью решить вопросы обеспечения независимого управления и стабилизации аппарата относительно шести степеней свободы при действии внешних ветровых возмущений на режимах висения, вертикального взлета и посадки;
Задачей изобретения является получение упрощенного способа управления, стабилизации и создания дополнительной подъемной силы дирижабля, свободного от недостатков прототипа, путем исключения необходимости в подведении мощности от двигателя к несущему винту через тяжелый, сложный редуктор и мощный вал несущего винта, путем исключения алгоритмов управления через автомат перекоса с системой тяг, поводков и шарниров втулки несущего винта и путем исключения необходимости управления поворотом всей массы модуля силовой установки на большие углы, например, от +30° до -60°.
Задача изобретения решается тем, что предложен способ управления, стабилизации и создания дополнительной подъемной силы дирижабля путем применения на нем рационально скомпонованных и находящихся в воздушном потоке автожирных винтов от одного до четырех и более, с управлением вектором полной аэродинамической силы тяги, осуществляемым при помощи непосредственного наклона оси вращения каждого автожирного винта относительно продольного и поперечного направлений в присутствии маршевых силовых установок, работающих механически независимо от автожирных винтов.
Полученный технический результат по способу характеризуется следующим существенным признаком:
Устойчивость и управляемость дирижабля для требуемых характеристик взлета, полета и посадки обеспечена путем использования на нем рационально скомпонованных и работающих в воздушном потоке одного, двух, трех, четырех и более автожирных винтов, с управляемым вектором полной аэродинамической силы тяги, осуществляемым при помощи непосредственного наклона оси вращения каждого автожирного винта относительно продольного и поперечного направлений в присутствии отдельных маршевых силовых установок, выполняющих свои тяговые функции механически независимо от автожирных винтов.
На Фиг.1 показана схема технической реализации способа на примере дирижабля с четырьмя автожирными винтами и двумя маршевыми силовыми установками.
Способ управления, стабилизации и создания дополнительной подъемной силы дирижабля на Фиг.1 изображен для случая горизонтального полета со скоростью V.
Корпус дирижабля 3 имеет хвостовое оперение 5, гондолу с полезным грузом 4, подвешенную на шпангоутах 7. На каждом шпангоуте закреплены мачты 6 двух автожирных винтов 1 - по одной слева и справа. Всего на мачтах 6 установлено 4 автожирных винта 1. Дирижабль имеет перетяжеление Gп.Степень перетяжеления Gп согласована с приемлемой нагрузкой на сметаемую площадь каждого автожирного винта 1. В горизонтальном полете плоскости автожирных винтов находятся под углом атаки α. Сила R - полная аэродинамическая сила, создаваемая автожирным винтом на угле атаки α. Сила N - боковая составляющая полной аэродинамической силы автожирного винта. Ось вращения автожирного винта 1 имеет возможность поворота вместе с плоскостью автожирного винта 1 на углы ±φ в поперечном направлении. На пилонах гондолы 4 подвешены маршевые двигатели 2. Тяга маршевых двигателей 2 в горизонтальном полете равна Р. W - скорость ветра.
Способ управления, стабилизации и создания дополнительной подъемной силы дирижабля осуществляется следующим образом (Фиг.1):
В горизонтальном полете под действием силы тяги Р маршевых двигателей дирижабль перемещается в пространстве со скоростью V. Воздушный поток с той же скоростью V набегает на плоскости автожирных винтов 1 под углом α и, проходя через площадь автожирного винта снизу вверх, создает на нем полную аэродинамическую силу R. При поступлении команд управления величиной силы R, ось вращения автожирного винта 1 вместе с его плоскостью поворачивается в пределах рабочего диапазона угла α в продольном направлении. При поступлении команд управления величиной боковой силы N, ось вращения автожирного винта 1 вместе с его плоскостью поворачивается в пределах рабочего диапазона угла ±φ в поперечном направлении. Однонаправленные силы N создают боковые управляющие воздействия на дирижабль. Дифференциальное отклонение силы N между передней и задней парой автожирных винтов 1 в пределах рабочего диапазона угла ±φ создает требуемый момент рыскания дирижабля. Дифференциальное отклонение силы N между левой и правой парой автожирных винтов 1 в пределах рабочего диапазона угла ±φ создает требуемый момент крена дирижабля. Дифференциальное изменение угла атаки α передних автожирных винтов 1, в отличие от задней пары - создает продольный управляющий момент.
Основное влияние на управляемость дирижабля при помощи предложенного способа оказывает заложенная в конструкцию степень перетяжеления Gп, скорость полета V, скорость ветра W, тяга Р, угол атаки автожирных винтов α и угол наклона автожирных винтов в поперечном направлении ±φ.
Автожирный несущий винт в составе объединенной силовой установки дирижабля обладает рядом существенных преимуществ.
К ним относятся:
1. Хорошее аэродинамическое качество (К=5,5-7).
2. Полная совместимость диапазонов рабочих скоростей дирижабля и автожирного винта. При всех эксплуатационных скоростях полета, вплоть до нулевой скорости, автожирный винт воспринимает ветер с разных направлений, создавая полную аэродинамическую силу R и обеспечивая боковыми составляющими N необходимые управляющие воздействия на аппарат.
3. Хорошее значение производной прироста коэффициента подъемной силы Су по углу атаки α диска (тангенс угла Су/α) достигает 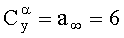
4. Отсутствие срывных режимов обтекания диска при всех практических углах притекания воздушного потока, включая рабочие углы атаки α=0°-90°.
5. Наличие эффекта устойчивого парашютирования при безмоторном вертикальном спуске и на кабрировании в момент приземления, что значительно уменьшает вертикальную и поступательную скорость аппарата перед касанием посадочной площадки.
6. Способность развивать большую подъемную силу тяги уже при скорости притекающего потока (или ветра) 7 м/с.
7. Свойство не создавать пылевого облака на земле, т.к. поток подходит к винту горизонтально и снизу вверх через винт.
8. Имеет небольшие рабочие усилия в системе управления при изменении углов наклона диска винта в двух взаимно перпендикулярных направлениях.
9. Использует простую, легкую и технологичную втулку двухлопастного несущего винта с общим выносным горизонтальным шарниром, без осевого и вертикального шарниров, без автомата перекоса, без поводков и тяг лопастей. Угол установки лопастей постоянный - обычно составляет 2,0°-2,5°.
10. В настоящее время широко используются недорогие серийные экструдированные лопасти с высокоэффективным автожирным профилем NACA8-H-12. Левое и правое вращение достигается установкой комлевой заделки лопасти слева или справа от торца заготовки.
11. Полезная мощность для создания силы тяги отбирается непосредственно от набегающего потока. На валу винта в полете нет крутящего момента, а на корпусе дирижабля отсутствуют реактивные моменты. Вся мощность сосредоточена в маршевых двигателях и от них оптимально перераспределяется через варьирование скоростью набегающего на автожирные винты потока.
12. Обладает низкой удельной массой. Один легкий несущий винт заменяет отдельный двигатель вертикальной стабилизации с редуктором и воздушным винтом.
13. Обеспечивает высокий уровень безопасности полета. При отказе всех маршевых двигателей перетяжеленный дирижабль сохраняет способность к управляемому планированию и посадке практически без пробега.
14. Рационально установленные на дирижабле автожирные винты полностью компенсируют разворачивающий момент при отказе одного или нескольких разнесенных на большое расстояние маршевых двигателей.
15. Дифференциальное управление наклоном винтов позволяет активно противостоять сносу дирижабля с линии пути в крейсерском полете путем создания требуемых боковых упреждающих сил и моментов.
16. Не требуется сложная и тяжелая трансмиссия для жесткой механичекой синхронизация вращения винтов.
К недостаткам автожирного винта следует отнести:
1. Необходимость предстартовой раскрутка винта. Чем выше обороты раскрутки, тем меньше требуется скорость передвижения платформы (обычно достаточно 30-35 км/ч), с которой осуществляется взлет перетяжеленного дирижабля. Взлет против ветра сокращает длину разбега до 15-20 метров.
2. Требование встраивания в конструкцию автожирного винта специального механизма раскрутки (механического, электрического, гидравлического или воздушного типа), который напрямую должен снабжается энергией от маршевых двигателей или от аэродромного источника питания.
3. Необходимость систематического и тщательного контроля за состоянием поверхности лопастей и особенно за чистотой «носика» его профиля. Загрязнения и налипания посторонних частиц, осаждение инея существенно ухудшают аэродинамические характеристики всего винта.
4. Отсутствие защиты лопастей от обледенения. Предложенный способ управления, стабилизации и создания дополнительной подъемной силы дирижабля, в котором для решения задачи изобретения использованы автожирные винты, позволил:
- исключить необходимость подведения мощности от двигателя к несущему винту через тяжелый редуктор и массивный вал несущего винта;
- отказаться от управления автоматом перекоса с системой тяг, поводков и шарниров втулки несущего винта;
- исключить необходимость поворота всей массы вертолетного модуля на углы больше рабочего диапазона управления автомата перекоса с неизбежным запаздыванием управляющих воздействий;
- повысить надежность системы, путем устранения сложной, разветвленной трансмиссии с большим количеством подвижных соединений и каналов управления;
- обеспечить независимость управления и стабилизации дирижабля относительно шести степеней свободы при действии внешних ветровых возмущений на режимах висения, вертикального взлета и посадки.
Изобретение относится к воздухоплаванию. Способ управления, стабилизации и создания дополнительной подъемной силы дирижабля, имеющего корпус, хвостовое оперение, гондолу с полезным грузом и бортовые системы, характеризуется тем, что устойчивость и управляемость дирижабля для требуемых характеристик взлета, полета и посадки обеспечена путем использования на нем автожирного винта с управляемым вектором полной аэродинамической силы. Предусмотрен наклон оси вращения автожирного винта (1) относительно продольного и поперечного направлений в присутствии отдельных маршевых силовых установок, выполняющих свои тяговые функции механически независимо от автожирного винта. Изобретение направлено на упрощение управления. 1 ил.
Способ управления, стабилизации и создания дополнительной подъемной силы дирижабля, имеющего корпус, хвостовое оперение, гондолу с полезным грузом и бортовые системы, отличающийся тем, что устойчивость и управляемость дирижабля для требуемых характеристик взлета, полета и посадки обеспечена путем использования на нем по меньшей мере одного автожирного винта с управляемым вектором полной аэродинамической силы, осуществляемым при помощи непосредственного наклона оси вращения автожирного винта относительно продольного и поперечного направлений в присутствии отдельных маршевых силовых установок, выполняющих свои тяговые функции механически независимо от автожирного винта.
| US 4591112 A1, 27.05.1986; | |||
| US 4269375 A1, 26.05.1981; | |||
| Кантующая букса к прокатным станам | 1940 |
|
SU63770A1 |

