[1] Настоящее изобретение относится к технологиям подводной робототехники, а более конкретно - к способам адаптивного управления манипулятором подводного аппарата.
УРОВЕНЬ ТЕХНИКИ
[2] Подводная, она же морская робототехника - это направление науки и практика проектирования, создания и применения роботов в подводной среде. Она объединяет в себе все темы обучения STEM-науки, технологические достижения, разработку новых технологий и математику, используемые для анализа данных, собранных по каждой миссии.
[3] Международная ассоциация морских подрядчиков (IMCA - от англ. International Marine Contractors Association) предлагает разделение необитаемых подводных аппаратов (НПА) на 5 классов. C учетом реального опыта разработки и применения НПА, эти классы можно охарактеризовать следующим образом:
[4] Класс I - осмотровые телеуправляемые НПА (ТНПА).
[5] Это недорогие электрические аппараты, укомплектованные, как правило, одной видеокамерой, сонаром и фонарями, с питанием от постоянного тока. Эти аппараты используются для сбора телеметрии. Глубина работы аппаратов этого класса в море обычно не превышает 300 м из-за ограничений, связанных с питанием и некомпенсированными корпусами.
[6] Класс II - осмотровые ТНПА с дополнительной полезной нагрузкой.
[7] Аппараты этого класса оснащаются как минимум двумя одновременно работающими видеокамерами и сонаром, и могут нести дополнительные датчики и инструменты. Лёгкие аппараты этого класса, так же, как и аппараты I класса, не требуют специального оборудования для их запуска, в то время как самые тяжёлые образцы требуют использовать спускоподъемное устройство, а также устройство глубоководного погружения (УГП). Однако габариты таких аппаратов и необходимой оснастки всё ещё позволяют использовать в качестве носителей гораздо более широкий круг надводных суден по сравнению с аппаратами III класса.
[8] Класс III - ТНПА рабочего класса.
[9] Это обычно тяжелые электромеханические аппараты, питаемые от высоковольтных (более 3000 В) цепей переменного тока с поверхности. Мощность, подаваемая на аппарат, обычно сразу преобразуется на аппарате в механическую (гидравлическую) для передвижения, а также для работы манипуляторов и других инструментов (гидравлических пил, моментных инструментов, резаков и т.д.).
[10] Класс IV - буксируемые и передвигающиеся по дну аппараты.
[11] Буксируемые аппараты приводятся в движение тянущим судном на поверхности или лебедкой. Некоторые из них имеют собственные движители, обеспечивающие ограниченные возможности маневрирования.
[12] Класс V - экспериментальные подводные аппараты.
[13] Сюда входят находящиеся в разработке и рассматриваемые как прототипы аппараты. Также к классу V относят аппараты специального назначения, которые не вписываются ни в один другой класс. Этот класс включает автономные необитаемые подводные аппараты.
[14] Следует обратить внимание на то, что в настоящее время выполнение сложных работ ведётся только рабочими аппаратами, при этом осмотровые аппараты значительно дешевле в использовании и более распространены. Таким образом, увеличение функционала осмотровых ТНПА, за счет использования многостепенных манипуляторов, может привести к переходу части работ от рабочих ТНПА к осмотровым ТНПА, что в свою очередь, приведет к значительному сокращению затрат на проведение подводных работ с использованием осмотровых ТНПА.
[15] Для изучения водной среды у государственных, академических и промышленных исследовательских организаций существует потребность в получении телеметрии и забора образцов под водой.
[16] ТНПА обычно используются для забора образцов на месте и доставки различных датчиков для сбора данных из изучаемой среды.
[17] Так как научные экспедиции не связаны с выполнением аппаратом какой-либо тяжелой работы (кроме забора геологических образцов), достаточно небольших электроприводов, манипуляторов и схватов. Типичными аппаратами для таких экспедиций являются ТНПА I класса или II класса с высокой пропускной способностью передачи данных и небольшими электрическими манипуляторами/схватами.
[18] Основные сценарии применения многостепенных манипуляторов на осмотровых ТНПА связаны с работами на грунте, когда ТНПА прижимает себя к поверхности тягой двигателей, что позволяет проводить работы, имея неподвижную опору.
[19] К таким сценариям относятся: очистка поверхностей, позиционирование датчиков, установка оборудования и т.д.
[20] Среди задач, выполняемых осмотровыми ТНПА в толще воды (без опоры на грунт), можно выделить: стропальные работы, сбор образцов, позиционирование датчиков и т.д.
[21] При работе без твердой опоры задача позиционирования рабочего органа (например схвата) существенно осложнена необходимостью синхронно управлять движениями ТНПА и манипулятора.
[22] Ключевым преимуществом при работе в толще воды может стать система управления, синхронизирующая движения манипулятора и ТНПА.
[23] Достоинством таких сценариев является увеличение числа задач, выполняемых осмотровыми ТНПА с многостепенными манипуляторами, а также повышение эффективности проведения существующих задач.
[24] Таким образом, для выполнения подводно-технических работ (ПТР) с помощью манипуляторов на ТНПА осмотрового класса, манипуляторы должны: (а) минимально изменять центр масс носителя при работе (т.е. иметь минимальный вес под водой) и (б) иметь систему управления (СУ), которая обладает необходимыми функциями. К таким функциям можно отнести, например: коррекцию положения манипулятора при колебаниях носителя, ограничение рабочих зон манипулятора в зависимости от присутствующих вокруг объектов, возможность задавать объект работы с помощью данных с системы технического зрения (СТЗ).
[25] При этом, такая система управления может быть использована и на манипуляторах ТНПА рабочего класса (для повышения точности их работы и упрощения работы операторов).
[26] Из уровня техники известно множество различных систем управления манипуляторами подводных аппаратов.
[27] Из патента RU 2781926 C1, опубл. 21.10.2022, известна система технического зрения, которая осуществляет моделирование положения манипулятора по облаку точек.
[28] Из заявки CN 113066273 A, опубл. 02.07.2021, известна система мониторинга сбора данных подводного робота с дистанционным управлением, содержащая модуль управления работой, модуль вывода сигнала операции, модуль сигнализации, модуль беспроводного приема, модуль обработки информации, модуль хранения информации, причем модуль сигнализации посылает сигнал тревоги.
[29] В заявке US 2010168919 A1, опубл. 01.07.2010, раскрыт способ управления шарнирным манипулятором, где положение манипулятора вычисляется с помощью энкодера, а также осуществляется корректировка положения манипулятора для достижения целевого положения.
[30] Из заявки US 2021162589 A1, 03.06.2021, известна система управления манипулятором подводного робота с обратной связью, а также обучающая система управления по заданным параметрам.
[31] Однако, раскрытые в вышеупомянутых решениях системы не соответствуют описанным в п. 24 критериям, в связи с чем их применение на осмотровых ТНПА не позволяет избавиться от описанных ранее проблем при проведении ПТР.
[32] Таким образом, заявляемая технология направлена на устранение недостатков, присущих предшествующему уровню техники.
[33] Заявляемое техническое решение осуществляет комплексирование данных с системы технического зрения носителя, с датчиков носителя и с датчиков манипулятора.
[34] Помимо указанного выше, заявляемое решение имеет такие особенности, как: (1) компенсация внешних воздействий на аппарат-носитель и возможность удержания конечного звена манипулятора в определённой точке; (2) «режим безопасности», подразумевающий введение ограничений рабочих зон манипулятора для того, чтобы избежать столкновения с подводными объектами; (3) помощь оператору, выражающаяся в предоставлении возможности выбора нужного объекта и возможности последующего автоматического выхода манипулятора в нужную точку для работы с выбранным объектом.
[35] Предлагаемый способ адаптивного управления манипулятором подводного аппарата главным образом направлен на повышение точности управления позиционированием манипулятора подводного аппарата за счет учета как данных с датчиков положения манипулятора, так и данных с датчиков положения аппарата-носителя и его системы технического зрения.
[36] Таким образом, основная цель заявляемого изобретения - реализовать способ адаптивного управления манипулятором подводного аппарата, обеспечивающий получение требуемого целевого положения конечного звена манипулятора. Заявляемый способ обеспечивает повышение точности и эффективности управления позиционированием манипулятора подводного аппарата. Предложенная технология также обеспечивает возможность применения манипуляторов как на аппаратах осмотрового класса, так и на аппаратах любых других классов (расширение области применения).
[37] К дополнительным положительным эффектам от изобретения можно отнести повышение удобства использования системы управления манипулятором, что приводит к более комфортной и быстрой работе с манипулятором.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
[38] Заявляемое техническое решение направлено на устранение недостатков, присущих предшествующему уровню техники, а также на развитие уже известных решений.
[39] Техническим результатом заявленного изобретения является повышение точности управления позиционированием манипулятора подводного аппарата.
[40] Данный технический результат достигается способом адаптивного управления манипулятором подводного аппарата, обеспечивающим получение целевого положения конечного звена манипулятора, выполненным с возможностью использования в манипуляционном комплексе подводного аппарата, содержащим этапы, на которых:
[41] получают первые данные, представляющие собой совокупность значений целевого угла поворота и целевого положения конечного звена манипулятора в системе координат, связанной со дном водоёма;
[42] получают вторые данные, представляющие собой текущее значение угла поворота аппарата-носителя и его текущее положение в системе координат, связанной со дном водоёма, от датчиков положения аппарата-носителя;
[43] получают третьи данные о координатах окружающих объектов и их типе от системы технического зрения аппарата-носителя;
[44] определяют с помощью первых и вторых данных первое значение целевого угла поворота и первое значение целевого положения конечного звена манипулятора в системе координат, связанной с аппаратом-носителем, и сравнивают его с третьими данными;
[45] определяют вторые значения целевых углов каждой степени манипулятора путём решения прямой задачи кинематики, на основании определенных первых значений и имеющихся данных о кинематической схеме манипулятора;
[46] получают четвёртые данные, представляющие собой совокупность значений текущего угла поворота и текущей скорости движения для каждой степени манипулятора от каждого из датчиков угла, расположенных на осях закрепления каждой степени манипулятора;
[47] определяют значение ошибки для каждой степени манипулятора на основании сравнения полученных четвёртых данных о значениях текущих углов поворота каждой степени манипулятора с определёнными вторыми значениями целевых углов поворота каждой степени;
[48] формируют управляющий сигнал на приводы манипулятора для достижения целевого положения и угла поворота конечного звена манипулятора.
[49] В одном частном варианте заявленного решения упомянутый манипуляционный комплекс подводного аппарата содержит, по меньшей мере, (а) средства для определения собственных координат и углов поворота и (б) средства для определения координат и типа окружающих объектов.
[50] В другом частном варианте заявленного решения окружающие объекты могут быть, по меньшей мере, таких типов, как: краны, вентили, гидравлические разъёмы, оборудование для подводных работ.
[51] Еще в одном частном варианте реализации заявленного решения способ дополнительно сконфигурирован для осуществления коррекции управляющего сигнала на приводы манипулятора на основании вторых и четвертых данных.
[52] В другом частном варианте заявленного решения коррекция управляющего сигнала выполняется для компенсации имеющихся внешних воздействий на аппарат-носитель.
[53] Еще в одном частном варианте заявленного решения коррекция управляющего сигнала осуществляется для предотвращения столкновения манипулятора с расположенными вокруг аппарата-носителя препятствиями и/или нецелевыми окружающими объектами.
[54] В другом частном варианте заявленного решения осуществляется возможность получать первые данные с пульта управления оператора манипулятора.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
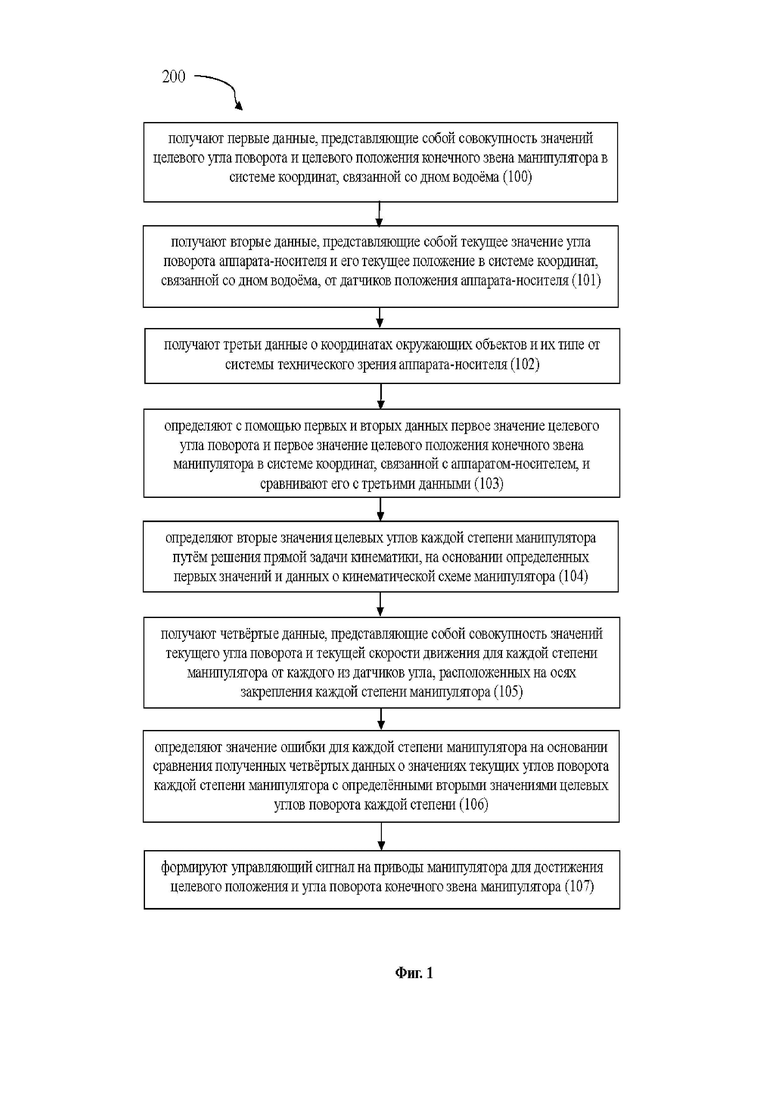
[55] Фиг. 1 - блок-схема способа адаптивного управления манипулятором подводного аппарата в некоторых вариантах реализации.
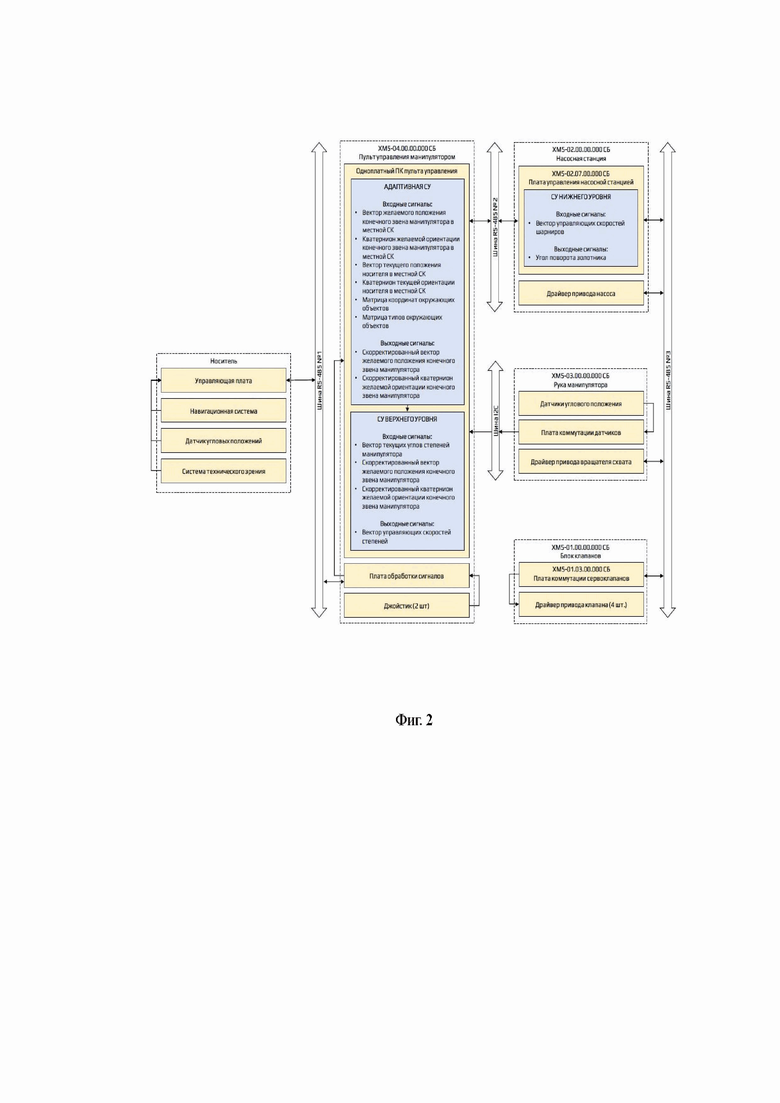
[56] Фиг. 2 - блок-схема манипуляционного комплекса в некоторых вариантах реализации.
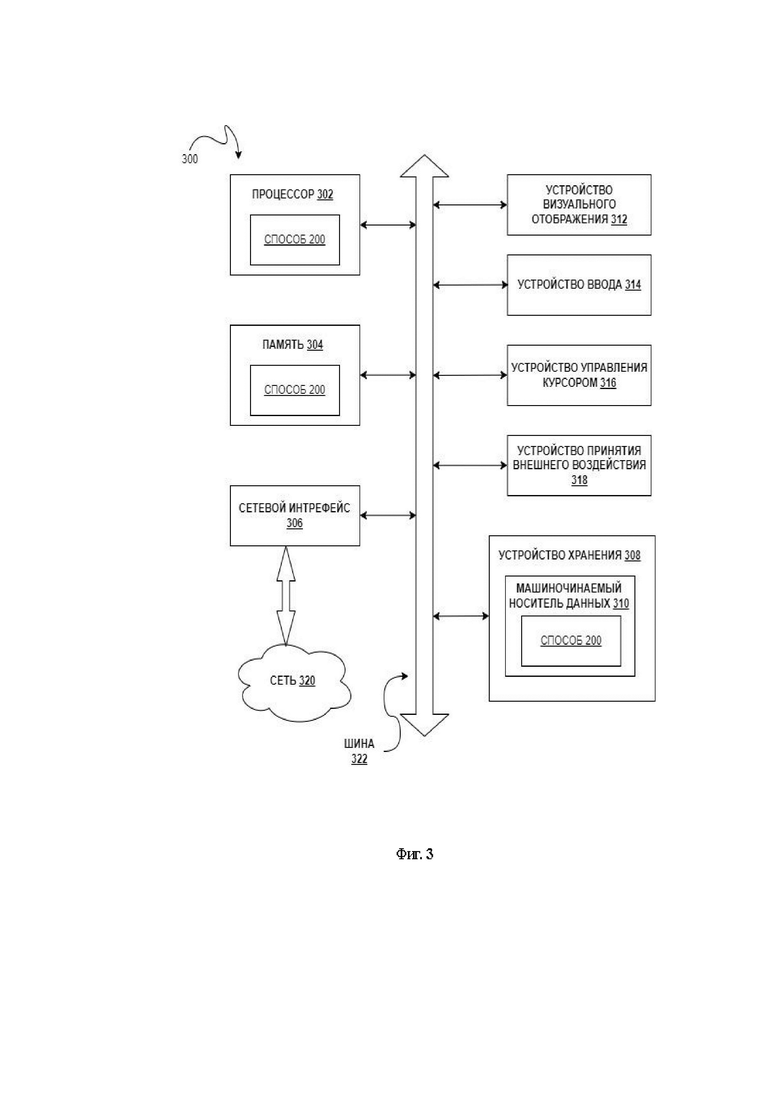
[57] Фиг. 3 - представлен один из возможных вариантов реализации компьютерной системы в соответствии с некоторыми вариантами реализации настоящего изобретения.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[58] Ниже будет приведено описание примерных вариантов осуществления заявленного изобретения. Однако заявленное изобретение не ограничивается только этими вариантами осуществления.
ПОСТАНОВКА ЗАДАЧИ
[59] Заявляемое техническое решение в различных своих вариантах осуществления может быть выполнено в виде систем и способов, реализуемых различными компьютерными средствами.
[60] Заявляемое техническое решение подходит для любых аппаратов-носителей, имеющих датчики обратной связи по углам носителя (например, инерциальные навигационные системы), а также датчики положения носителя (например, гидроакустические навигационные системы).
[61] К таким носителям из ТНПА осмотрового класса относятся, но не ограничиваясь, например: ТНПА «Марлин-350», ТНПА Saab SeaEye Falcon.
[62] На аппарат-носитель должна быть установлена система технического зрения, которая выдаёт информацию о координатах окружающих объектов и их типе. Примерами таких систем технического зрения являются: Vaarst SubSLAM X2 или Savante Vergence SLAM HD. Выходными данными упомянутых систем может служить матрица координат точек, определяющих геометрию окружающих объектов. Кроме того, системы технического зрения проводят анализ типа объектов, основываясь на их геометрии. К типам объектов могут относиться, включая, но не ограничиваясь: краны, вентили, разъёмы типа «хотстаб», датчики, буи и т.д.
[63] Также, для реализации заявляемого решения необходим манипулятор с датчиками угла на каждой его степени. Примерами таких манипуляторов могут быть: Гидробот XM-5 (электрогидравлический манипулятор) или Reach Bravo 5.
[64] Заявляемое техническое решение может быть реализовано вычислительной системой, соответствующей необходимым условиям.
[65] Манипулятор может быть как электрическим, так и гидравлическим. Количество степеней манипулятора не влияет на реализацию заявляемого технического решения. Аппарат-носитель может быть осмотрового класса, рабочего класса, или любого другого класса, не ограничиваясь.
[66] В состав СУ манипулятором подводного аппарата входят: СУ нижнего уровня, СУ верхнего уровня, блок адаптивной СУ.
[67] СУ верхнего уровня имеет обратную связь по положению (координатам) и обеспечивает:
сбор данных с датчиков положения манипулятора о текущем положении каждой из степеней манипулятора;
преобразование данных о текущем положении каждой из степеней в данные о текущем положении и угле поворота конечного звена (посредством решения прямой задачи кинематики);
получение данных от пульта управлении о требуемом положении и угле поворота конечного звена;
преобразование данных о требуемом положении и угле поворота конечного звена в данные о требуемом положении каждой из степеней (посредством решения обратной задачи кинематики);
вычисление требуемой скорости каждой из степеней для достижения требуемого положения конечного звена;
выдачу требуемой скорости каждой из степеней на СУ нижнего уровня;
приём данных от блока адаптивной СУ.
[68] СУ нижнего уровня в свою очередь имеет обратную связь по скорости и обеспечивает:
сбор (и преобразование) данных с датчиков положения о текущей скорости движения каждой из степеней;
получение данных от СУ верхнего уровня о требуемой скорости движения каждой из степеней;
вычисление необходимого (для коррекции скорости каждой степени) сигнала на приводящее устройство соответствующей степени;
выдача необходимого сигнала на приводящее устройство каждой из степеней.
[69] Блок адаптивной СУ обеспечивает:
сбор данных с навигационной системы аппарата-носителя о текущем положении носителя в системе координат, связанной со дном водоема (местной системе координат);
сбор данных с датчиков носителя о его текущих угловых положениях (координатах);
сбор данных с системы технического зрения об объектах вокруг, расстоянии до них и их типе;
сбор данных о целевом положении конечного звена манипулятора в местной системе координат;
выдачу скорректированного сигнала о целевом положении и угле конечного звена на СУ верхнего уровня. Важно, что СУ верхнего уровня и блок адаптивной СУ работают в разных системах координат. А именно, СУ верхнего уровня работает в системе координат, связанной с аппаратом-носителем, а блок адаптивной СУ - в местной системе координат, связанной со дном водоема. При наличии внешних воздействий на аппарат-носитель (например, качки или тряски), блок адаптивной СУ скорректирует целевое положение и угол конечного звена манипулятора в СУ верхнего уровня таким образом, чтобы отработать эти внешние воздействия;
выдача ограничивающего сигнала на СУ верхнего уровня. Система технического зрения имеет возможность построить матрицу векторов до ближайших препятствий (нецелевых окружающих объектов) в режиме реального времени. При этом, блок адаптивной СУ, зная требуемое оператором положение конечного звена манипулятора, и имея матрицу координат/векторов до препятствий, имеет возможность скорректировать желаемое положение и угол конечного звена, поступающие в СУ верхнего уровня. Такой тип коррекции позволит избежать столкновения манипулятора с объектом на дне;
коррекция режима работы манипулятора. Блок адаптивной СУ получает данные с системы технического зрения о типе объекта. В свою очередь, зная тип объекта, с которым производится взаимодействие, блок адаптивной СУ осуществляет перевод СУ верхнего уровня в режим работы, наиболее подходящий для этого объекта, а также передаёт на СУ верхнего уровня целевое положение и угол конечного звена, наиболее подходящие для работы с объектом.
[70] Традиционные СУ работают только с данными, полученными от датчиков положения самого манипулятора. Для увеличения удобства и точности работ по управлению манипулятором ПА, в заявляемом решении используются как данные с датчиков носителя, так и данные, полученные от системы технического зрения.
[71] При этом, под адаптивностью, в контексте данного изобретения, подразумевается:
адаптивность СУ к внешним воздействиям: способность компенсировать колебания и движения самого носителя (тряска, качка, какие-то другие микродвижения);
адаптивность СУ к окружению: способность анализировать имеющиеся вокруг объекты и предотвращать столкновения с ними в случае, если оператор выдал неправильный управляющий сигнал;
адаптивность СУ при позиционировании: способность в зависимости от объекта, с которым нужно произвести взаимодействие, корректировать режим работы для обеспечения большей скорости/большей точности/большей силы, а также осуществлять подстройку управляющего сигнала от оператора для обеспечения наилучшей точности позиционирования.
[72] На фиг. 1 представлена блок-схема способа адаптивного управления манипулятором подводного аппарата (ПА). Предложенный вариант реализации способа 200 содержит, по меньшей мере, этапы 100-107.
[73] Способ адаптивного управления манипулятором ПА обеспечивает получение целевого положения конечного звена манипулятора. Упомянутый способ выполнен с возможностью использования в манипуляционном комплексе ПА. Манипуляционный комплекс, как показано в примере на фиг. 2, может включать в себя, по меньшей мере, но не ограничиваясь: насосную станцию; блок клапанов/клапанную коробку; манипулятор (непосредственно объект управления); пульт управления.
[74] Первый этап 100 способа 200 осуществляется следующим образом. Блок адаптивной СУ получает первые данные, представляющие собой совокупность значений целевого угла поворота и целевого положения конечного звена манипулятора в местной системе координат (СК), то есть в системе координат, связанной со дном водоёма.
[75] Далее, на этапе 101 - блок адаптивной СУ получает вторые данные, представляющие собой текущее значение угла поворота аппарата-носителя и его текущие координаты (то есть его текущее положение) в системе координат, связанной со дном водоёма, от датчиков положения аппарата-носителя.
[76] Этап 102 - получают третьи данные о координатах окружающих объектов и их типе от системы технического зрения аппарата-носителя. Третьи данные представлены в виде матриц, как более подробно было указано выше при описании блока адаптивной СУ.
[77] На этапе 103 определяют с помощью первых и вторых данных первое значение целевого угла поворота и первое значение целевого положения конечного звена манипулятора в системе координат, связанной с аппаратом-носителем, и сравнивают его с третьими данными.
[78] Целевые координаты и угол конечного звена манипулятора в системе координат, связанной с носителем, определяются как разность координат (или угла) конечного звена манипулятора в местной системе координат, связанной с дном водоёма, и координат (или угла) носителя в местной системе координат. Данная операция может быть выполнена включая, но не ограничиваясь, методом вычитания векторов соответствующих координат, либо умножением кватернионов соответствующих углов.
[79] В случае, если целевые координаты конечного звена заданы таким образом, что выход в него повлечёт столкновение манипулятора с окружающим объектом (т.е. длина вектора целевого положения конечного звена манипулятора превышает длину сонаправленного ему вектора точки окружающего объекта), в качестве целевых принимаются координаты точки окружающего объекта, лежащей на векторе целевого положения конечного звена манипулятора, с которой возможно столкновение.
[80] Этап 104 - путём решения прямой задачи кинематики, на основании определенных ранее первых значений и имеющихся данных о кинематической схеме манипулятора определяют вторые значения целевых углов каждой степени манипулятора.
[81] Прямая задача кинематики - это вычисление положения (X, Y, Z) рабочего органа манипулятора по его кинематической схеме и заданной ориентации (A1, A2… An) его звеньев (n - число степеней свободы манипулятора, A - углы поворота).
[82] Таким образом, решение прямой задачи говорит - где будет находиться рабочий орган манипулятора, при заданных углах его суставов, а обратная задача, наоборот, говорит: как нужно «вывернуться» манипулятору, чтобы его рабочий орган оказался в заданном положении.
[83] Далее этап 105, на котором получают четвёртые данные, представляющие собой совокупность значений текущего угла поворота и текущей скорости движения для каждой степени манипулятора от каждого из датчиков угла, расположенных на осях закрепления каждой степени манипулятора.
[84] Этап 106 - определяют значение ошибки для каждой степени манипулятора на основании сравнения полученных четвёртых данных о значениях текущих углов поворота каждой степени манипулятора с определёнными вторыми значениями целевых углов поворота каждой степени.
[85] На данном этапе осуществляют вычисление вектора ошибок каждой степени манипулятора посредством вычитания данных, полученных на этапе 103 из значений четвертых данных.
[86] Этап 107 - формируют управляющий сигнал на приводы манипулятора для достижения целевого положения и угла конечного звена манипулятора.
[87] На данном этапе получают данные вектора целевых скоростей каждой степени манипулятора. Также на данном этапе может быть произведена необходимая коррекция с помощью СУ.
[88] Необходимо отметить, что этапы 100-103 способа 200 адаптивного управления манипулятором осуществляются посредством блока адаптивной СУ, входящего в состав СУ. Этапы 104-107 в свою очередь реализуются посредством блока СУ верхнего уровня, входящего в состав СУ.
[89] На фиг. 2 представлена в качестве примера блок-схема манипуляционного комплекса в некоторых вариантах реализации.
[902] В представленном примере реализации манипуляционный комплекс состоит из, по меньшей мере, следующих частей:
- аппарат-носитель;
- пульт управления манипулятором, содержащим одноплатный ПК пульта управления, содержащим блок адаптивной СУ, СУ верхнего уровня;
- плата обработки сигналов;
- по меньшей мере, два джойстика;
- насосная станции;
- драйвер привода насоса;
- рука манипулятора;
- блок клапанов;
- по меньшей мере, три шины RS-485;
- шина I2C.
[91] Аппарат-носитель содержит, по меньшей мере: управляющую плату, навигационную систему, датчик угловых перемещений, систему технического зрения.
[92] Блок адаптивной СУ обменивается данными, по меньшей мере, с аппаратом-носителем, с платой обработки сигналов по шине RS-485 (1). Джойстики передают команды на плату обработки сигналов. Блок обработки сигналов, в свою очередь, передает команды в блок адаптивной СУ.
[93] Блок адаптивной СУ получает входные данные, обрабатывает их и выдает выходные сигналы. При этом, в качестве входных данных выступают, по меньшей мере:
вектор желаемого положения конечного звена манипулятора в местной системе координат (СК);
- кватернион желаемой ориентации конечного звена манипулятора в местной СК;
- вектор текущего положения носителя в местной СК;
- кватернион текущей ориентации носителя в местной СК;
- матрица координат окружающих объектов;
- матрица типов окружающих объектов.
[94] В качестве выходных сигналов могут быть, по меньшей мере:
- скорректированный вектор желаемого положения конечного звена манипулятора;
- скорректированный кватернион желаемой ориентации конечного звена манипулятора.
[95] СУ верхнего уровня также содержит входные и выходные сигналы.
[96] В качестве входных сигналов, могут быть, по меньше мере:
- вектор текущих углов степеней манипулятора;
- скорректированный вектор желаемого положения конечного звена манипулятора;
- скорректированный кватернион желаемой ориентации конечного звена манипулятора.
[97] В качестве выходных сигналов, может быть, по меньшей мере: вектор управляющих скоростей степеней.
[98] Одноплатный ПК пульта управления обменивается данными с платой управления насосной станции посредством шины RS-485 (2).
[99] Одноплатный ПК пульта управления также обменивается данными с рукой манипулятора посредством шины I2C.
[100] Насосная станция содержит, по меньшей мере, плату управления насосной станцией, содержащей, в свою очередь: СУ нижнего уровня. Плата управления насосной станцией содержит также драйвер привода насоса.
[101] СУ нижнего уровня получает входные сигналы - вектор управляющих скоростей шарниров, а передает выходные сигналы - угол поворота золотника.
[102] Рука манипулятора содержит датчики углового положения, плату коммутации датчиков, драйвер привода вращателя схвата.
[103] Блок клапанов состоит из платы коммутации сервоклапанов, четырех драйверов привода клапана.
[104] Насосная станция, рука манипулятора, блок клапанов обмениваются данными посредством шины RS-485 (3).
[105] СУ ПА посредством наличия СУ верхнего уровня, нижнего уровня, а также блока адаптивного управления обменивается данными с датчиков угла манипулятора, для дальнейшего их анализа. Блок адаптивного управления ПА обменивается данными с аппаратом-носителем и получает их от датчиков положения аппарата-носителя и системы технического зрения в системе координат, связанной со дном водоёма. В качестве водоема может быть море, океан, озеро, река, не ограничиваясь.
[106] После получения данных от манипулятора и от аппарата-носителя, блок адаптивного управления ПА передает управляющий сигнал на приводы манипулятора для достижения целевого положения конечного звена манипулятора.
[107] Таким образом, блок адаптивного управления управляет конечным звеном манипулятора по конечной точке (совместная реализация СУ верхнего и нижнего уровня), учитывая: (1) данные с датчиков угла степеней манипулятора, (2) данные с аппарата-носителя в системе координат аппарата-носителя и (3) данные от системы технического зрения в системе координат, связанной со дном водоема.
[108] При этом, целевое положение конечного звена манипулятора в некоторых вариантах реализации может быть задано оператором с пульта управления.
[109] В одном из примерных вариантов реализации, система адаптивного управления ПА может быть представлена в виде компьютерной системы 300, которая описана и представлена на фиг. 3.
[110] Компьютерная система 300, в одном из примеров реализации, может выполнять способ адаптивного управления манипулятором 200, представленный на фиг.1, во всех возможных его реализациях.
[111] Компьютерная система 300 может быть подключена (например, по сети) к другим компьютерным системам в локальной сети, интрасети, экстрасети или сети Интернет. Компьютерная система может работать в качестве сервера в сетевой среде клиент-сервер. Компьютерная система может быть персональным компьютером (PC), планшетным компьютером, ТВ-приставкой (STB), персональным цифровым помощником (PDA), мобильным телефоном или любым устройством, способным выполнять набор инструкций (последовательных или иных), определяющих действия, которые должны выполняться этим устройством. Кроме того, несмотря на то что проиллюстрирована только одна компьютерная система, термин «компьютер» также следует понимать как любую совокупность компьютеров, которые индивидуально или совместно выполняют набор (или несколько наборов) инструкций для выполнения любого одного или нескольких вариантов реализаций способов, описанных в настоящем описании.
[112] Примерная компьютерная система 300 состоит из устройства 302 обработки данных, оперативного запоминающего устройства 304 (например, постоянного запоминающего устройства (ROM), флеш-памяти, динамической памяти с произвольным доступом (DRAM), например, такой как синхронная динамическая память с произвольным доступом (SDRAM)), и устройства 308 хранения данных, которые взаимодействуют друг с другом через шину 322.
[113] Устройство 302 обработки данных представляет собой одно или несколько устройств обработки общего назначения, таких как микропроцессор, центральный процессор и т.п. Устройство 302 обработки данных может быть микропроцессором с полным наборов команд (CISC), микропроцессором для вычисления сокращенных наборов команд (RISC), микропроцессором с очень длинным командным словом (VLIW), процессором, реализующим другие наборы команд, или процессором, реализующим сочетание наборов команд.
[114] Устройство 302 обработки данных также может представлять собой одно или несколько устройств обработки специального назначения, таких как специализированная интегральная схема (ASIC), программируемая на месте матрица логических элементов (FPGA), цифровой сигнальный процессор (DSP), сетевой процессор и т.п. Устройство 302 обработки данных сконфигурировано для выполнения инструкций с целью выполнения этапов способа 200 адаптивного управления манипулятором подводного аппарата, а также для выполнения любых описанных выше операций способа.
[115] Компьютерная система 300 может дополнительно включать сетевой интерфейс 306, устройство 312 визуального отображения (например, жидкокристаллический дисплей), буквенно-цифровое устройство 314 ввода (например, клавиатуру, джойстик, пуль управления, потенциометр или иное устройство), устройство 316 управления курсором и устройство принятия внешнего воздействия 318. В одном варианте реализации устройство 312 визуального отображения, устройство 314 буквенно-цифрового ввода и устройство 316 управления курсором могут быть объединены в единый компонент или устройство (например, сенсорный жидкокристаллический дисплей).
[116] Устройство принятия внешнего воздействия 318 представляет собой одно или несколько устройств или датчиков для принятия внешнего воздействия. В качестве устройства принятия внешнего воздействия может выступать видеокамера, микрофон, сенсорный датчик, датчик движения, датчик температуры, датчик влажности, датчик освещенности и т.п.
[117] Устройство 308 хранения данных может включать машиночитаемый носитель 310 данных, на котором хранятся инструкции, воплощающие любую одну или несколько методик или функций, описанных в настоящем документе (способ 200). Инструкции также могут полностью или, по крайней мере, частично находиться в оперативной памяти 304 и/или на устройстве 302 обработки данных во время их выполнения компьютерной системой 300. Оперативная память 304 и устройство 302 обработки данных также могут представлять собой машиночитаемые носители данных. В некоторых реализациях инструкции способа могут дополнительно передаваться или приниматься по сети 320 через сетевое интерфейсное устройство 306.
[118] Несмотря на то, что в иллюстративных примерах машиночитаемый носитель 310 данных представлен в единственном числе, термин «машиночитаемый носитель» следует понимать как включающий в себя один или несколько носителей (например, централизованную или распределенную базу данных и (или) связанные с ней кэши и серверы), в которых хранится один или несколько наборов инструкций. Термин «машиночитаемый носитель» также следует понимать как включающий в себя какой-либо носитель, способный хранить, кодировать или переносить набор инструкций для выполнения машиной и вынуждающий машину выполнять любой один или несколько способов настоящего изобретения. Следовательно, термин «машиночитаемый носитель» должен включать, помимо прочего, твердотельные запоминающие устройства, оптические и магнитные носители данных.
[119] Следует еще раз отметить, что указанные выше варианты способов могут быть реализованы посредством использования охарактеризованных ранее соответствующих компьютерных систем. Следовательно, предложенный способ может быть расширен и уточнен всеми теми же частными вариантами исполнения, которые уже были описаны выше для реализации системы адаптивного управления манипулятором подводного аппарата.
[120] Кроме того, варианты осуществления изобретения могут быть реализованы с использованием программного обеспечения, аппаратных средств, программной логики или их комбинации. В данном примере осуществления программная логика, программное обеспечение или набор инструкций хранятся на одном или более из различных традиционных считываемых компьютером носителе данных.
[121] В контексте данного описания «считываемым компьютером носителем данных» может быть любая среда или средства, которые могут содержать, хранить, передавать, распространять или транспортировать инструкции (команды) для их использования (исполнения) вычислительной системой, например, такой как компьютер. При этом носитель данных может являться энергонезависимым машиночитаемым носителем данных.
[122] Любой аспект или решение, описанные в настоящем документе как «пример» или «приведенный в качестве примера», необязательно должны рассматриваться как предпочтительный или преимущественный по сравнению с другими аспектами или решениями. Скорее, использование слова «пример» предназначено для представления концепций с практической точки зрения. Кроме того, использование термина «вариант реализации», «один вариант реализации», «пример осуществления/реализации» или «один пример реализации» во всем тексте не означает один и тот же вариант или пример осуществления, если только они не описаны как таковые.
[123] Кроме того, термины «первый», «второй», «третий», «четвертый» и т.д., используемые в настоящем документе, предназначены для обозначения различных элементов или величин и необязательно имеют порядковое значение в соответствии с их числовым обозначением.
[124] При необходимости, по меньшей мере, часть различных операций, рассмотренных в описании данного решения, может быть выполнена в отличном от представленного порядке и/или одновременно друг с другом.
[125] Хотя данное техническое решение было описано подробно в целях иллюстрации наиболее необходимых в настоящее время и предпочтительных вариантов осуществления, следует понимать, что данное изобретение не ограничивается раскрытыми вариантами осуществления и более того, предназначено для модификации и различных других комбинаций признаков из описанных вариантов осуществления. Например, следует понимать, что настоящее изобретение предполагает, что в возможной степени, один или более признаков любого варианта осуществления могут быть объединены с другим одним или более признаками любого другого варианта осуществления.
[126] В то время как многие изменения и модификации изобретения станут очевидными после прочтения приведенного выше описания следует понимать, что любой конкретный вариант осуществления, показанный и описанный в качестве примера, никоим образом не должен рассматриваться как ограничивающий. Поэтому ссылки на детали различных вариантов осуществления не предназначены для ограничения объема формулы изобретения, которая сама по себе содержит только признаки, рассматриваемые как раскрытие изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАЛОГАБАРИТНЫЙ ТЕЛЕУПРАВЛЯЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 2008 |
|
RU2387570C1 |
| Комплекс для осуществления подводных работ | 2022 |
|
RU2785237C1 |
| Малогабаритный телеуправляемый подводный аппарат | 2021 |
|
RU2775894C1 |
| Подводный робототехнический комплекс | 2015 |
|
RU2609618C1 |
| ПОДВОДНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2010 |
|
RU2446983C2 |
| Способ управления многостепенным подводным манипулятором с помощью откалиброванной монокулярной видеокамеры и лазерного дальномера | 2024 |
|
RU2841062C1 |
| ПОДВОДНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2014 |
|
RU2563074C1 |
| Способ позиционно-силового управления автономным необитаемым подводным аппаратом с многостепенным манипулятором | 2023 |
|
RU2799176C1 |
| ПОГРУЖАЕМАЯ ПЛАТФОРМА-ТРАНСФОРМЕР И РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ ОСУЩЕСТВЛЕНИЯ ПОДВОДНЫХ РАБОТ | 2010 |
|
RU2438914C1 |
| Способ навигационного оборудования морского района и самоходный подводный аппарат для его осуществления и арктическая подводная навигационная система для вождения и навигационного обеспечения надводных и подводных объектов навигации в стесненных условиях плавания | 2021 |
|
RU2773538C1 |
Изобретение относится к технологиям подводной робототехники, а именно – к способам адаптивного управления манипулятором подводного аппарата. Предложен способ управления, обеспечивающий получение целевого положения конечного звена манипулятора, выполненный с возможностью использования в манипуляционном комплексе подводного аппарата. Получают первые данные, представляющие собой совокупность значений целевого угла поворота и целевого положения конечного звена манипулятора в системе координат, связанной с дном водоёма. Получают вторые данные, представляющие собой текущее значение угла поворота аппарата-носителя и его текущее положение в системе координат, связанной с дном водоёма, от датчиков положения. Получают третьи данные о координатах окружающих объектов и их типе от системы технического зрения. Определяют с помощью первых и вторых данных значение целевого угла поворота и значение целевого положения конечного звена манипулятора в системе координат, связанной с аппаратом-носителем, и сравнивают его с третьими данными. В итоге формируется управляющий сигнал на приводы манипулятора для достижения целевого положения и угла поворота конечного звена манипулятора. Повышается точность управления позиционированием манипулятора. 6 з.п. ф-лы, 3 ил.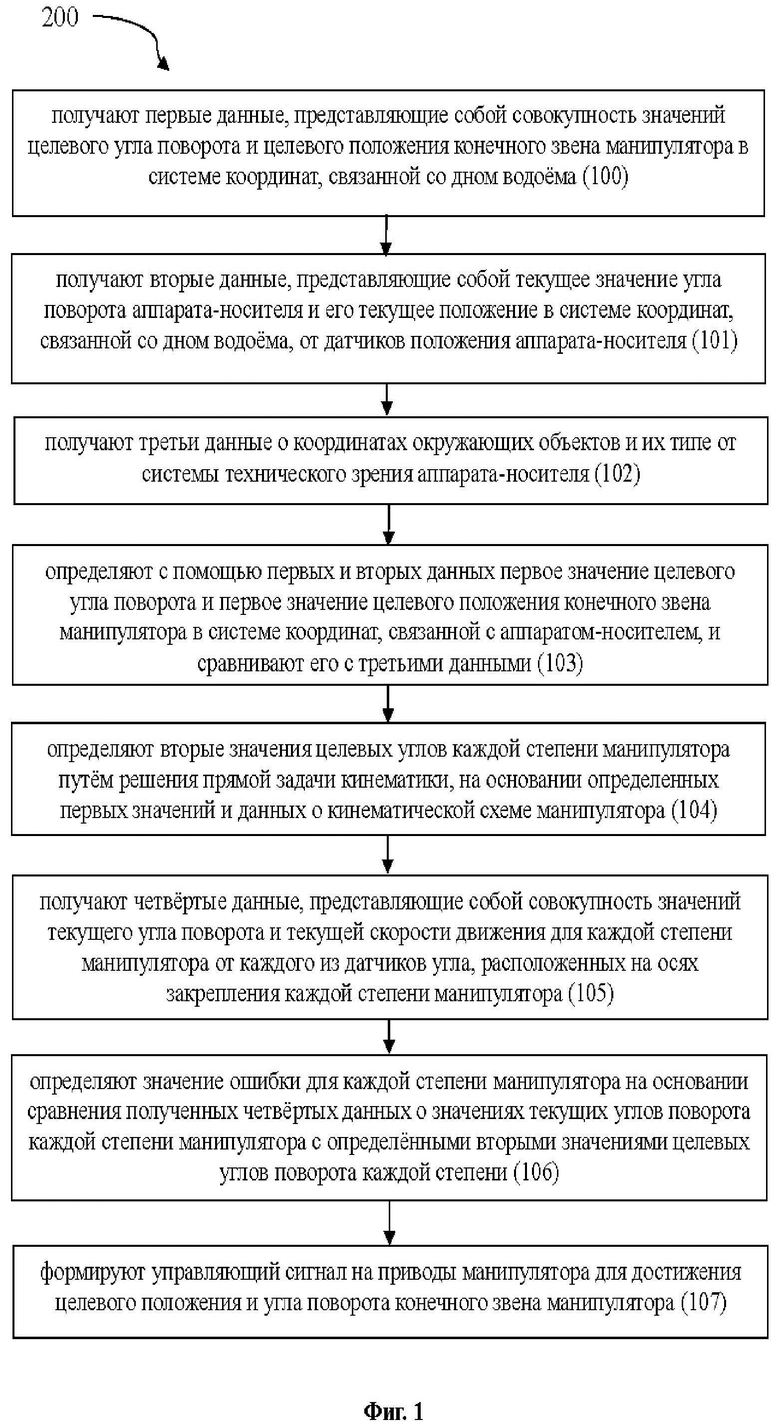
1. Способ адаптивного управления манипулятором подводного аппарата, обеспечивающий получение целевого положения конечного звена манипулятора, выполненный с возможностью использования в манипуляционном комплексе подводного аппарата, содержащий этапы, на которых:
получают первые данные, представляющие собой совокупность значений целевого угла поворота и целевого положения конечного звена манипулятора в системе координат, связанной с дном водоёма;
получают вторые данные, представляющие собой текущее значение угла поворота аппарата-носителя и его текущее положение в системе координат, связанной с дном водоёма, от датчиков положения аппарата-носителя;
получают третьи данные о координатах окружающих объектов и их типе от системы технического зрения аппарата-носителя;
определяют с помощью первых и вторых данных первое значение целевого угла поворота и первое значение целевого положения конечного звена манипулятора в системе координат, связанной с аппаратом-носителем, и сравнивают его с третьими данными;
определяют вторые значения целевых углов каждой степени манипулятора путём решения прямой задачи кинематики, на основании определенных первых значений и имеющихся данных о кинематической схеме манипулятора;
получают четвёртые данные, представляющие собой совокупность значений текущего угла поворота и текущей скорости движения для каждой степени манипулятора от каждого из датчиков угла, расположенных на осях закрепления каждой степени манипулятора;
определяют значение ошибки для каждой степени манипулятора на основании сравнения полученных четвёртых данных о значениях текущих углов поворота каждой степени манипулятора с определёнными вторыми значениями целевых углов поворота каждой степени;
формируют управляющий сигнал на приводы манипулятора для достижения целевого положения и угла поворота конечного звена манипулятора.
2. Способ по п. 1, отличающийся тем, что упомянутый манипуляционный комплекс подводного аппарата содержит, по меньшей мере, (а) средства для определения собственных координат и углов поворота и (б) средства для определения координат и типа окружающих объектов.
3. Способ по любому из пп. 1, 2, в котором окружающие объекты могут быть, по меньшей мере, таких типов, как: краны, вентили, гидравлические разъёмы, оборудование для подводных работ.
4. Способ по п. 1, дополнительно сконфигурированный для осуществления коррекции управляющего сигнала на приводы манипулятора на основании вторых и четвертых данных.
5. Способ по п. 4, отличающийся тем, что коррекция управляющего сигнала выполняется для компенсации имеющихся внешних воздействий на аппарат-носитель.
6. Способ по любому из пп. 4, 5, отличающийся тем, что коррекция управляющего сигнала выполняется для предотвращения столкновения манипулятора с расположенными вокруг аппарата-носителя препятствиями и/или нецелевыми окружающими объектами.
7. Способ по п. 1, выполненный с возможностью получать первые данные с пульта управления оператора манипулятора.
| Способ управления многозвенным манипулятором необитаемого подводного аппарата для выполнения манипуляционных операций с подводными объектами | 2022 |
|
RU2781926C1 |
| Способ позиционно-силового управления подводным аппаратом с многозвенным манипулятором для выполнения контактных манипуляционных операций с подводными объектами | 2022 |
|
RU2789510C1 |
| CN 113066273, 02.07.2021 | |||
| US 20100168919 A1, 01.07.2010 | |||
| US 20210162589 A1, 03.06.2021. | |||

