Область техники
Изобретение относится к области приборостроения - лазерным датчикам угловой скорости, применяемым в навигационных системах.
Уровень техники
В лазерном гироскопе (ЛГ) с устройством виброподставки (ВП) (см. Aronovitz F. Fundamentals of the ring laser gyro // Optical Gyros and their Application. RTO-AG-339, 1999, p. 3-1-3-45) относительные крутильные колебания КЛ вносят дополнительную составляющую в выходной сигнал гироскопа, которую целесообразно компенсировать посредством измерения параметров этих колебаний. К системам для измерения параметров относительных крутильных колебаний КЛ предъявляются жесткие требования по точности, массо-габаритным характеристикам и надежности. Также необходимо, чтобы измерительная система изготавливалась с применением отработанных и дешевых технологий, обладала конструктивной простотой и не вызывала механического или температурного дисбаланса при работе КЛ.
В работе (см. Зюзев Г.Н. О компенсации частотной подставки лазерного датчика абсолютной угловой скорости // Труды МВТУ. Теория электрических цепей и элементы систем управления и регулирования, №385, 1982, с.10-16) предлагается использовать равноплечий интерферометр Майкельсона в качестве датчика параметров относительных крутильных колебаний КЛ. Для получения информации о движении КЛ на нем устанавливают трипель-призму, удаленную на заданное расстояние от центра вращения и находящуюся в измерительном плече интерферометра. Остальные элементы интерферометра жестко связаны с основанием ЛГ. Поворот КЛ приводит к смещению трипель-призмы и изменению регистрируемой интерференционной картины. Недостатками датчика являются необходимость точного соблюдения расстояния от оси трипель-призмы до центра вращения КЛ, сложность юстировки элементов интерферометра, а также чувствительность измерительной схемы к температурным воздействиям и отклонениям оси вращения КЛ от номинального положения. Кроме того, данный интерферометр имеет сложную конструкцию, что значительно увеличивает габариты ЛГ, в целом.
Известно применение в качестве датчика параметров относительных крутильных колебаний КЛ пьезоэлектрического кристалла, закрепляемого на одном из плечей упругого торсиона виброподвеса (см. патент США №US 4406965, опубл. 27.09.1983 г., МПК G01C 19/64), или магнитоэлектрического (индуктивного) датчика (см. патент США №US 4597667, опубл. 01.07.1986 г., МПК G01C 19/64). Указанные датчики вырабатывают соответствующий перемещению КЛ аналоговый сигнал углового перемещения или угловой скорости, который после обработки вычитается из общего выходного сигнала гироскопа. Однако аналоговый сигнал датчиков подвержен влиянию помех, а его качество существенно влияет на погрешность измерений. К другим недостаткам пьезоэлектрического и индуктивного датчиков относятся влияние нестабильности параметров измерительной цепи на точность измерений, наличие температурной погрешности, присутствие гистерезиса и нелинейности преобразования.
Известен ЛГ (см. патент США №US 3627425, опубл. 14.12.1971, МПК G01C 19/66), в котором параметры относительных крутильных колебаний КЛ определяются по реперным положениям, в качестве которых выбраны точки с нулевой скоростью вращения КЛ в абсолютном пространстве (смена направления вращения). Специальная электронная схема выделяет моменты смены направления вращения КЛ из преобразованных выходных сигналов фотодетектора ЛГ и генерирует соответствующие управляющие сигналы для системы обработки информации ЛГ. В результате работы этой схемы гироскоп накапливает показания только за целое число периодов колебаний КЛ. Суммарный угол относительного поворота КЛ за один период колебаний, обусловленный виброподставкой, равен нулю, в связи с чем составляющая этих колебаний в выходном сигнале ЛГ исключается. Следует отметить, что для корректного выделения смены направления вращения КЛ необходимо, чтобы ЛГ измерял малую и постоянную входную скорость. Кроме того, из-за флуктуаций амплитуды колебаний КЛ суммарный угол относительного поворота КЛ за один период колебаний не точно соответствует нулевому значению, что приводит к появлению погрешности в измерениях. Также к недостаткам можно отнести низкую частоту получения выходного сигнала ЛГ, ограниченную частотой колебаний КЛ.
Известно устройство для измерения параметров относительных крутильных колебаний КЛ в реальном масштабе времени (см. патент США №US 4888705, опубл. 19.12.1989 г., МПК G01C 19/70 G01C 19/64), состоящее из датчика скорости (пьезоэлектрический или магнитоэлектрический датчик), непрерывно измеряющего относительную скорость КЛ, величина выходного сигнала которого соответствует величине скорости КЛ, детектора нулевого положения КЛ, выходной сигнал которого соответствует моментам прохождения КЛ реперного положения относительно основания ЛГ, и фильтра, связанного с датчиком скорости и детектором, который обрабатывает сигналы датчика скорости и детектора с учетом модели динамического процесса и вырабатывает в качестве выходного сигнала непрерывную оптимальную оценку положения КЛ. К недостаткам устройства можно отнести высокую погрешность датчика скорости и наличие высокого уровня шума в его сигнале, что не позволяет оценивать положение КЛ с высокой точностью, несмотря на применение детектора нулевого положения. Кроме того, детекторы нулевого положения, обладающие требуемой точностью, имеют высокую стоимость и сравнительно большие габариты, а обработка сигналов в рассматриваемом устройстве осуществляется по сложному алгоритму.
Наиболее близким к заявляемому изобретению является лазерный гироскоп с компенсацией составляющей, вносимой виброподставкой (патент США №US 4344706, опубл. 17.08.1982 г., МПК G01C 19/66, G01C 19/64), содержащий КЛ, устройство виброподставки, датчик параметров относительных крутильных колебаний КЛ в виде пьезоэлектрического датчика, блок обработки сигналов КЛ и блок компенсации. Как указывалось выше, недостатком гироскопа является наличие в цепи аналогового сигнала датчика параметров относительных крутильных колебаний КЛ погрешностей, обусловленных свойствами этого датчика, его конструктивным исполнением и воздействием помех. К другим недостаткам относятся влияние нестабильности параметров измерительной цепи датчика на точность измерений, наличие температурной погрешности, присутствие гистерезиса и нелинейности преобразования.
Раскрытие изобретения / сущность изобретения
Технической задачей изобретения является упрощение конструкции лазерного гироскопа при уменьшении массо-габаритных параметров, сохранении высокой точности измерений и повышении надежности.
Реализуется поставленная задача тем, что лазерный гироскоп, содержащий кольцевой лазер, устройство виброподставки, блок обработки сигналов кольцевого лазера, выход которого подключен к блоку компенсации, и датчик параметров относительных крутильных колебаний КЛ, при этом датчик параметров относительных крутильных колебаний КЛ выполнен в виде оптико-электронной системы определения смещения положения виброподставки, содержащей последовательно установленные по ходу луча (оптической оси системы) полупроводниковый лазер, дифракционную решетку, поляризационный светоделитель для выделения пучка линейной поляризации, отражающее зеркало под углом 45° к оси системы, коллиматор, четвертьволновую пластину, фокусирующий объектив, установленный с возможностью перемещения вдоль оси системы с помощью актюаторов, и оптический транспарант, установленный на кольцевом лазере, с измерительными метками, выполненными в виде прямых параллельных чередующихся первых поглощающих или частично поглощающих и вторых прозрачных полос, причем ширина всех полос одинакова и период b, равный наименьшему расстоянию между двумя первыми или двумя вторыми полосами, связан с размером d центрального светового пятна соотношением 3b/4=d, или оптический транспарант с измерительными метками, выполненными в виде прямых параллельных чередующихся выступов прямоугольного сечения и впадин таких, что наименьшее расстояние между двумя выступами b равно наименьшему расстоянию между двумя впадинами, упомянутое расстояние b и ширина выступа, равная 3b/8, связаны с размером центрального светового пятна соотношением 3b/4=d, поверхности всех выступов лежат в первой плоскости, поверхности всех впадин лежат во второй плоскости, при этом первая и вторая плоскости параллельны, а расстояние между этими плоскостями составляет величину 0,75λ/4n, где λ - длина волны оптического излучения источника, а n - показатель преломления среды, в которой распространяется это излучение, и расположенный на торце или основании кольцевого лазера, причем в обратном ходе пучка в оптической системе от поляризационного светоделителя установлены последовательно цилиндрическая линза и многоплощадный фотодетектор, при этом в лазерный гироскоп дополнительно введены блок автоматического регулирования размера световых пятен, соединенный с актюаторами, блок обработки сигналов выполнен в виде последовательно соединенных формирователя квадратурных сигналов, вход которого связан с многоплощадным фотодетектором, и блока преобразования квадратурных сигналов, соединенного с одним из входов блока компенсации, второй вход последнего подключен к выходу электронного блока обработки сигналов кольцевого лазера.
Изобретение поясняется чертежами, где
- на фиг. 1 показана функциональная схема лазерного гироскопа с компенсацией составляющей, вносимой виброподставкой,
- на фиг. 2 приведена конфигурация оптического транспаранта с измерительными метками в виде параллельных чередующихся поглощающих и прозрачных полос,
- на фиг. 3 приведена конфигурация оптического транспаранта с измерительными метками в виде чередующихся выступов и впадин,
- на фиг. 4 представлена функциональная схема оптико-электронной системы для определения смещения положения вибропоставки,
- на фиг. 5 показана схема расположения фоточувствительных площадок фотодетектора,
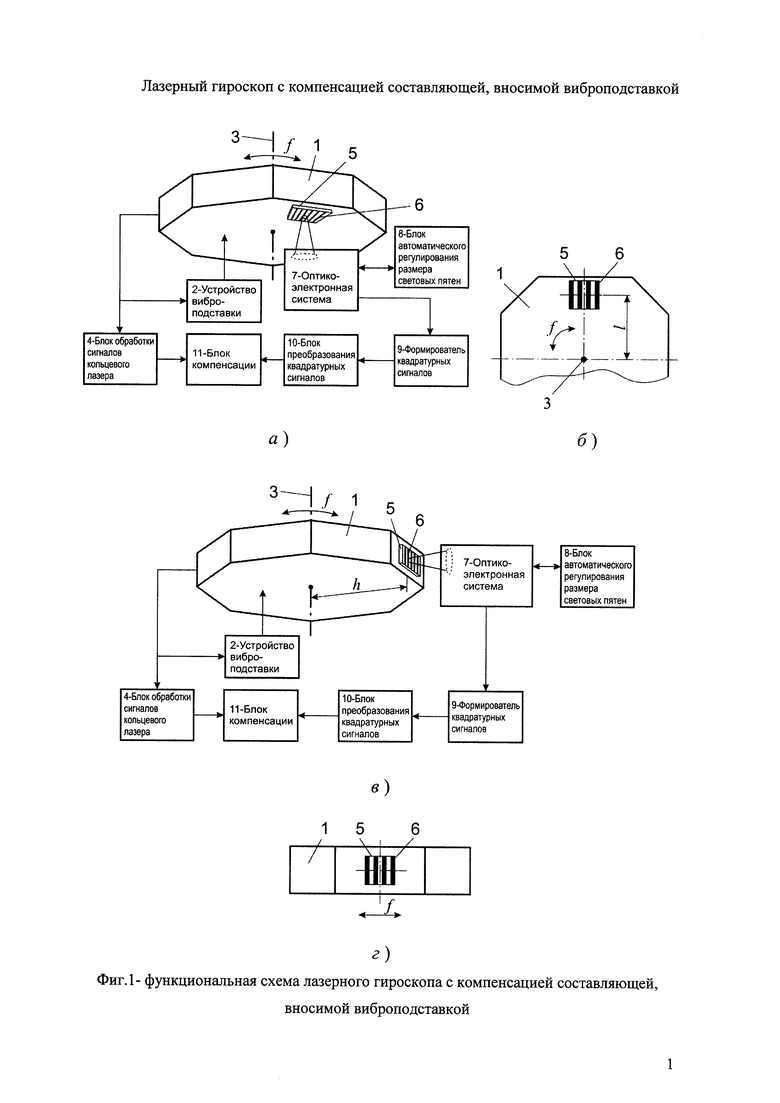
- на фиг. 6 представлена функциональная схема блока автоматического регулирования размера световых пятен оптико-электронной системы,
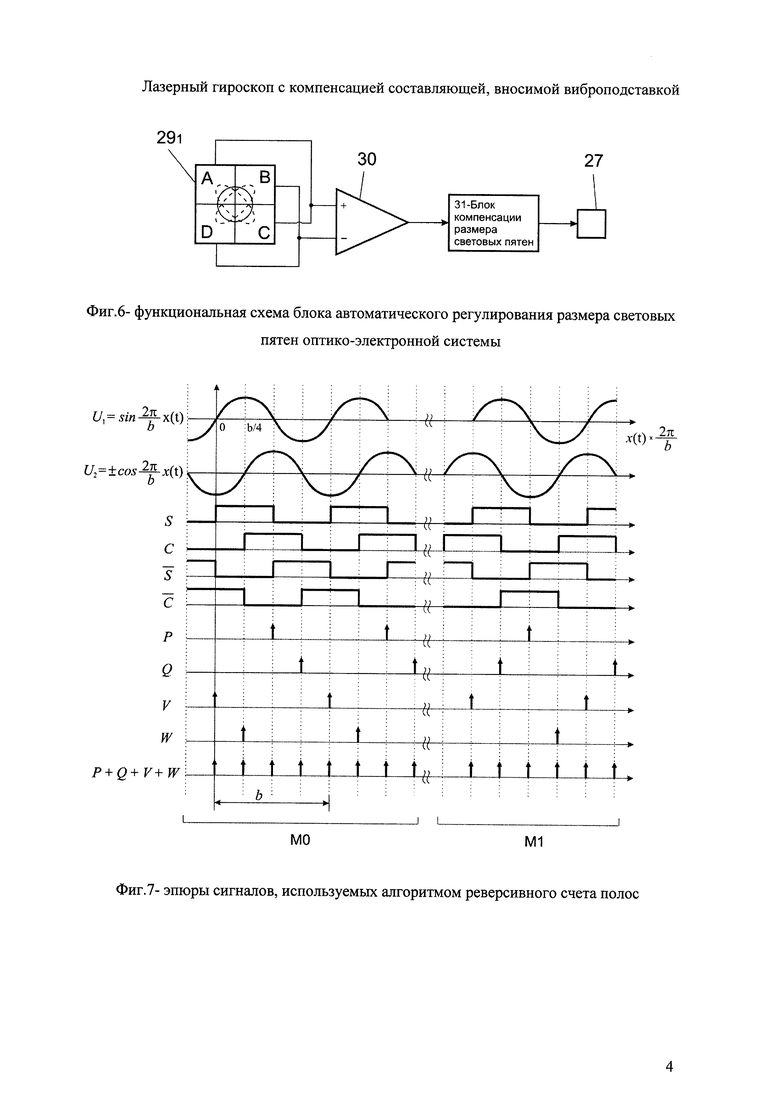
- на фиг. 7 представлены эпюры сигналов, используемых алгоритмом реверсивного счета полос,
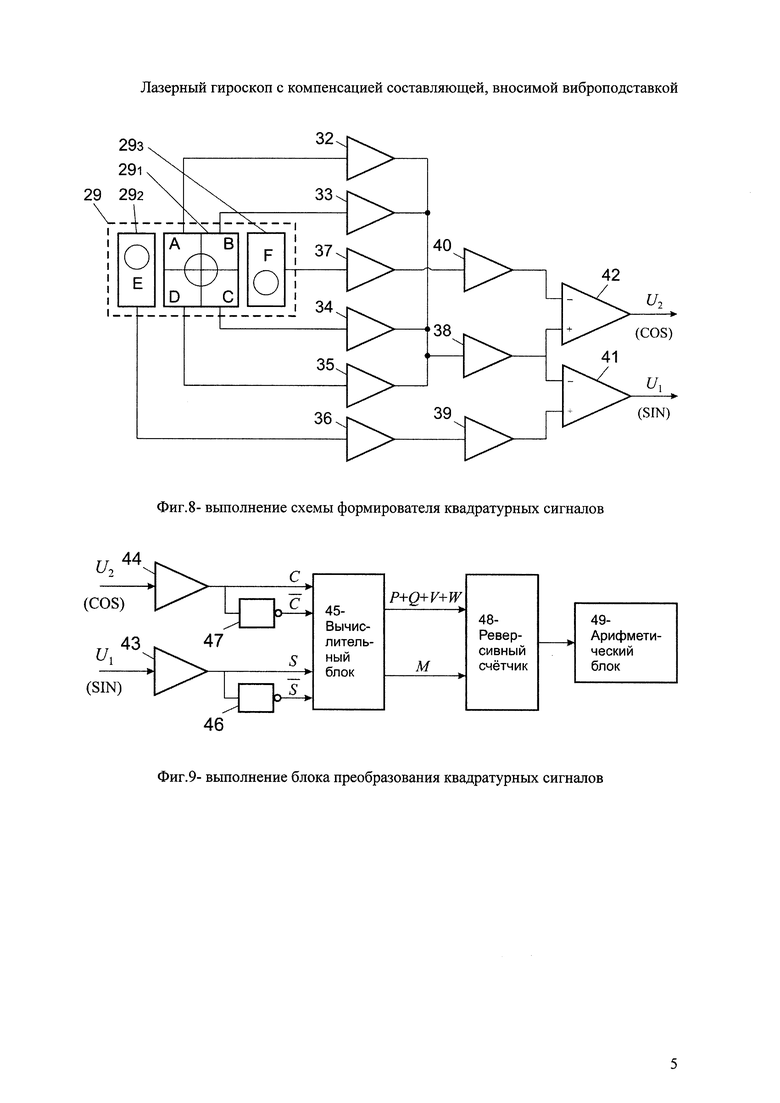
- на фиг. 8 показано выполнение схемы формирователя квадратурных сигналов,
- на фиг. 9 показано выполнение блока преобразования квадратурных сигналов.
Лазерный гироскоп содержит кольцевой лазер 1 с устройством виброподставки 2, совершающий угловые колебания с частотой  и малой амплитудой вокруг оси 3, блок 4 обработки сигналов кольцевого лазера, транспарант 5 с измерительными метками 6, оптико-электронную систему 7, блок 8 автоматического регулирования размера световых пятен, формирователь 9 квадратурных сигналов, блок 10 преобразования квадратурных сигналов, блок компенсации 11.
и малой амплитудой вокруг оси 3, блок 4 обработки сигналов кольцевого лазера, транспарант 5 с измерительными метками 6, оптико-электронную систему 7, блок 8 автоматического регулирования размера световых пятен, формирователь 9 квадратурных сигналов, блок 10 преобразования квадратурных сигналов, блок компенсации 11.
Устройство ВП 2 содержит исполнительные элементы, закрепленные на основании ЛГ и механически связанные с КЛ, а также блок управления параметрами работы ВП (на чертеже не показаны). Электронный блок 4 обработки сигналов КЛ осуществляет преобразование этих сигналов в абсолютное угловое положение КЛ в инерциальном пространстве в реальном масштабе времени. При этом величина получаемого абсолютного углового положения КЛ содержит составляющую, обусловленную его относительными колебаниями. На моноблоке КЛ 1 жестко закреплен оптический транспарант 5, имеющий набор измерительных меток 6, и входящий в состав датчика параметров относительных крутильных колебаний КЛ, выполненного в виде оптико-электронной системы 7 для измерения относительного положения кольцевого лазера, Оптико-электронная система 7 (см. фиг. 4) формирует на поверхности транспаранта 5 три расположенных определенным образом световых пятна. При движении КЛ это излучение модулируется измерительными метками 6, отражается от транспаранта 5 и считывается системой 7. Оптико-электронная система 7 преобразует принятое оптическое излучение в электрические сигналы. Блок 8 для автоматического регулирования размера световых пятен оптико-электронной системы обеспечивает поддержание их параметров в зависимости от электрических сигналов, получаемых от фотодетектора. Обработка сигналов, получаемых на выходе системы 7 осуществляется формирователем квадратурных сигналов 9 и блоком преобразования квадратурных сигналов 10, на выходе которого в реальном масштабе времени формируется величина относительного углового положения КЛ. Блок компенсации 11 осуществляет вычитание составляющей относительного углового положения КЛ, сформированной блоком 10, из величины абсолютного углового положения КЛ, определяемого электронным блоком 4.
На фиг. 2 а, б приведена конфигурация оптического транспаранта 5 по первому из двух разновидностей исполнения измерительных меток. Как видно из фиг. 2а, на транспарант нанесены измерительные метки в виде прямых параллельных полос 61 и 62. Каждая полоса 61 частично поглощает оптическое излучение, направляемое оптико-электронной системой 7 на поверхность транспаранта, а каждая полоса 62 полностью пропускает это излучение, поэтому условно можно считать полосы 61 «темными», а полосы 62 - «светлыми». Наименьшее расстояние между двумя «темными» полосами 61 или двумя «светлыми» полосами 62 составляет величину b (период), а ширина полос 61 и 62 одинакова и составляет величину b/2. Величина b выбрана в соответствии с диаметром d центрального светового пятна 121, создаваемого на поверхности транспаранта 5 оптико-электронной системой 7, с учетом соотношения 3b/4=d. Диаметры d1 пятен 122, 123 удовлетворяют условию d1=(5/6…1)⋅d. В момент совпадения центра «темной» полосы и центра светового пятна 12 наблюдается минимум отраженного от транспаранта излучения, связанного этим пятном, однако при частичном поглощении излучения полосой световой поток не блокируется полностью. Наличие минимального светового потока необходимо для корректной работы блока автоматического регулирования размера световых пятен. В момент совпадения центра «светлой» полосы и центра светового пятна наблюдается максимум отраженного от транспаранта излучения. При колебаниях КЛ светлые и темные полосы поочередно пересекают световые пятна 121, 122, 123, благодаря чему модуляция интенсивности излучения от каждого светового пятна имеет периодический характер. С учетом указанных выше соотношений ширина полос не превосходит диаметр каждого светового пятна, поэтому характер модуляции близок к синусообразному. Световые пятна 121, 122, 123 располагаются на одной прямой, находящейся под определенным углом к полосам транспаранта. Расстояние между пятнами 121 и 122, 123 в направлении, перпендикулярном полосам транспаранта, составляет величину b/4. Это обеспечивает фазовый сдвиг, равный π/2, между модуляциями интенсивности излучения от пятен 121, 122 и 121, 123. Расстояние между пятнами 121 и 122, 123 в направлении, параллельном полосам транспаранта некритично и выбирается минимальным при условии отсутствия взаимного влияния излучения от этих пятен, например, 5b/4. Упомянутый угол прямой линии, содержащей световые пятна, определяется соотношением приведенных расстояний и в данном случае равен arctg[(b/4)/(5b/4)]≈11,3 град.
На фиг. 3а, б приведена конфигурация оптического транспаранта 5 по второму альтернативному исполнению измерительных меток. Как видно из фиг. 3a и фиг. 3б, измерительные метки транспаранта выполнены в виде набора прямых протяженных параллельных чередующихся выступов 63 прямоугольного сечения и впадин 64. Наименьшее расстояние между двумя выступами 63 или двумя впадинами 64 составляет величину и. Высота выступов составляет величину 0,75λ/4n, где n - показатель преломления среды, в которой распространяется излучение оптико-электронной системы. В момент совпадения центра выступа и центра светового пятна 12, создаваемого на поверхности транспаранта оптико-электронной системой 7, часть излучения отражается от самого выступа, в то время как другая часть - от смежных впадин. При выбранной высоте выступов наблюдается интерференционное гашение излучения от выступов и впадин, в результате чего наблюдается минимум отраженного от транспаранта излучения, связанного с отдельным пятном, однако световой поток не блокируется полностью, благодаря чему обеспечивается устойчивая работа блока автоматического регулирования размера световых пятен. Для эффективного гашения излучения ширина выступа 63 выбрана меньше ширины «темной» полосы 61, описанной ранее, и составляет величину 3b/8. В момент совпадения центра впадины и центра светового пятна наблюдается максимум отраженного от транспаранта излучения. Соотношения между диаметрами пятен и периодом b, их взаимное расположение и ориентация относительно выступов, а также принцип модуляции интенсивности и ее характер аналогичны тем, что были указаны для транспаранта по первому варианту исполнения измерительных меток.
В первом случае для изготовления измерительных меток транспаранта могут применяться, например, современные технологии изготовления амплитудных дифракционных решеток. Структура слоев транспаранта при изготовлении с использованием фототехнологических или лазерных процессов может быть организована в соответствии с фиг. 2б. Прозрачный слой 13 используется в качестве подложки. На него последовательно наносят слой фоторезиста или другого фоточувствительного материала 14, отражающий слой 15 и защитный слой 16. Полосы формируют проецированием на слой фоторезиста заданной светотеневой (фототехнологические процессы) или интерференционной (лазерные процессы) картины. При воздействии излучения на слой фоторезиста его коэффициент поглощения изменяется, в результате чего создается необходимая конфигурация транспаранта. Кроме того, нанесение измерительных меток на рассматриваемый транспарант можно выполнять, например, по технологии, используемой при записи информации на оптический диск в бытовых приборах, с применением полупроводникового лазера и специального красителя в качестве фоточувствительного слоя 14 (Чемес Е.А. Оптическая запись и воспроизведение цифровой информации. Одесса: Наука и техника, 2006, с. 124-126.). Помимо указанных способов, транспарант может быть изготовлен, например, по технологии создания «чистых» оптических записываемых дисков с предварительно нанесенной спиральной дорожкой (Чемес Е.А. Оптическая запись и воспроизведение цифровой информации. Одесса: Наука и техника, 2006, с. 118-123).
Во втором случае исполнения для создания транспаранта измерительных меток могут применяться, например, современные технологии изготовления фазовых дифракционных решеток. Структура слоев транспаранта при изготовлении с использованием фототехнологических или лазерных процессов с последующим химическим травлением может быть организована в соответствии с фиг. 3б. Прозрачный слой 17 используется в качестве подложки. На него наносят слой фоторезиста или другого фоточувствительного материала, который под воздействием излучения изменяет свои физические свойства. Желаемый рельеф формируют проецированием на слой фоторезиста заданной светотеневой (фототехнологические процессы) или интерференционной (лазерные процессы) картины. Последующее химическое травление снимает облученную часть фоторезиста (или необлученную - в зависимости от типа фоторезиста) вместе с участками подложки под ним. Остатки фоторезиста смывают. Полученную таким образом подложку с фазовым рельефом покрывают отражающим 18 и защитным 19 слоями. Рассматриваемый транспарант также может быть изготовлен, например, по технологии массового производства нестираемых оптических дисков с информацией, однократно нанесенной на заводе-изготовителе (Накадзима X., Огава X. Цифровые грампластинки: / под ред. В.Г. Королькова. М.: Радио и связь, 1988, с. 72-75).
Описанные транспаранты имеют простую конфигурацию, т.к. измерительные метки представляют собой набор одинаковых элементов несложной формы. Малые габариты транспаранта, достаточные для измерений, и простота его конфигурации позволяют применять ряд широко распространенных и отработанных технологических методов, что положительно сказывается на его стоимости и технологичности.
На фиг. 4 представлена функциональная схема оптико-электронной системы 7. Система содержит последовательно установленные по ходу луча полупроводниковый лазер 20, дифракционную решетку 21, светоделитель 22, отражающее зеркало 23 под углом 45° к оси системы, коллиматор 24, четвертьволновую пластину 25, фокусирующий объектив 26, установленный с возможностью перемещения вдоль оси системы с помощью актюаторов 271 и 272, оптический транспарант 5. В обратном ходе лучей после светоделителя 22 установлены цилиндрическая линза 28 и многоплощадный фотодетектор 29,
Оптический транспарант 5 имеет рабочую область площадью не более 1 мм2 малые габариты и вес (менее 1 г), благодаря чему не создает механического или температурного дисбаланса в КЛ. Оптико-электронная система 7 с полупроводниковым лазером по объему не превышает 0,01 дм3. Как видно из фиг. 1а, в, транспарант закрепляется на КЛ одним из нижеописанных способов. Один из способов закрепления показан на фиг. 1а, б. Транспарант 5 установлен на КЛ 1 так, что он находится в плоскости колебаний, а его метки 6 располагаются параллельно прямой, соединяющей ось 3 вращения КЛ и геометрический центр транспаранта 5. Удаление геометрического центра транспаранта от оси вращения составляет величину l1. Оптико-электронная система 7 установлена на основании ЛГ так, что световые пятна полностью попадают на транспарант, а центральное световое пятно находится на расстоянии l1 от оси вращения. Другой способ закрепления транспаранта показан на фиг. 1в, г. Транспарант 5 установлен на КЛ 1 перпендикулярно плоскости колебаний, причем геометрический центр транспаранта совпадает с центром соответствующей грани моноблока КЛ. Измерительные метки 6 располагаются параллельно оси 3 вращения КЛ. Удаление h установочной плоскости транспаранта от оси вращения равно удалению соответствующей грани КЛ. Оптико-электронная система 7 установлена на основании ЛГ так, что центральное световое пятно попадает на геометрический центр транспаранта и находится на расстоянии h1 от оси вращения. Величины h и h1 отличаются друг от друга на толщину информационного слоя транспаранта. Установка и закрепление транспаранта на КЛ не вызывает затруднений, связанных с возможным несоответствием температурных коэффициентов линейного расширения материалов КЛ и этого транспаранта, благодаря его плоской форме, малым габаритам и весу.
Излучение от полупроводникового лазера 20 с длиной волны λ при помощи дифракционной решетки 21 разделяется на три расходящихся пучка, соответствующих нулевому и двум первым порядкам дифракции. Более высокие порядки дифракции не используются. Полученные таким образом три лазерных пучка проходят через поляризационный светоделитель 22, приобретают линейную поляризацию, после чего отражаются от зеркала 23 и проходят через коллиматор 24. Далее излучение попадает на четвертьволновую пластину 25, получая круговую поляризацию, и фокусируется с помощью объектива 26 на транспарант 5. Точность фокусировки достигается за счет перемещения объектива 26 вдоль оптической оси при помощи актюаторов 27. Световые пятна 121, 122, 123 трех сфокусированных на транспаранте 5 пучков располагаются так, как показано на фиг. 2а и фиг. 3a. Центральное световое пятно 121 соответствует пучку нулевого порядка дифракции. Диаметр d центрального светового пятна 121 определяется числовой апертурой объектива 26 и длиной волны излучения, а диаметры боковых пятен 122, 123 - помимо этого, параметрами дифракционной решетки 21. Необходимые расстояния между световыми пятнами формируются соответствующим выбором параметров дифракционной решетки и угла поворота всего блока оптико-электронной системы 7 относительно начального положения транспаранта. При колебаниях КЛ, связанный с ним транспарант, модулирует отраженное от него излучение и направляет обратно в объектив 26. Модулированные лазерные пучки проходят четвертьволновую пластинку 25 и приобретают линейную поляризацию, перпендикулярную поляризации пучков излучения, прошедшего от лазера 20 через поляризационный светоделитель 22. Три линейно поляризованных модулированных лазерных пучка последовательно проходят элементы 24, 23 и отражаются от поляризационного светоделителя 22, не пропускающего излучение в сторону лазера 20, что положительно сказывается на стабильности его работы. Затем модулированные пучки лазерного излучения проходят через цилиндрическую линзу 28 и попадают на многоплощадочный фотодетектор 29, генерирующий соответствующие интенсивностям этих пучков электрические сигналы. Отметим, что все элементы, входящие в оптико-электронную систему 7, являются миниатюрными, что обуславливает ее малые габариты и вес.
На фиг. 5 показано расположение изображений световых пятен 121, 122, 123 на фоточувствительных площадках фотодетектора 29. Модулированный пучок нулевого порядка дифракции (соответствует пятну 121) попадает на фоточувствительные площадки A, B, C, D сектора 291, а пучки первых порядков (соответствуют пятнам 122, 123) - на площадки E сектора 292 и F сектора 293. Все три пучка содержат информацию об угловом положении объекта измерения; пучок нулевого порядка дополнительно содержит информацию о качестве фокусировки объектива 26.
Для осуществления точной фокусировки объектива 26 на поверхность транспаранта 5 и достижения заданных размеров световых пятен 12 применяется астигматический метод. Благодаря использованию цилиндрической линзы 28 форма пучка нулевого порядка дифракции (соответствует пятну 121) меняется от круговой до эллиптической в зависимости от расстояния между объективом и транспарантом. Частное выполнение блока 8 автоматического регулирования размера световых пятен оптической системы показано на фиг. 6. При проецировании пучка некруглой формы на фоточувствительные площадки A, B, C, D электрический сигнал, получаемый от каждого из этих элементов, имеет различную величину. Сигнал ошибки фокусировки FErr вырабатывается с помощью дифференциального усилителя 30 с учетом следующего соотношения электрических сигналов FErr=(A+C)-(В+D). Сигнал FErr поступает в блок компенсации размера световых пятен 31, который с учетом этого сигнала управляет актюаторами 27. Таким образом, необходимое расстояние между объективом и транспарантом поддерживается автоматически, что повышает надежность считывания измерительных меток 6 и значительно снижает требования к юстировке измерительной системы. Устойчивость и надежность работы блока автоматического регулирования размера световых пятен достигается тем, что при попадании центрального светового пятна 121 на метку транспаранта отраженное излучение не блокируется полностью.
Закрепление транспаранта 5 на торце или основании КЛ, показанном на фиг. 1в, г, обуславливает непрерывное изменение расстояния между объективом 26 и транспарантом, а следовательно, и непрерывное перемещение объектива, благодаря работе блока автоматического регулирования размера световых пятен 8. Однако при малой амплитуде колебаний КЛ непрерывные перемещения объектива не влияют на работу измерительной системы.
Для выделения информации об угловом положении объекта используются электрические сигналы, полученные от площадок E сектора 292 и F сектора 293, а также суммарный сигнал (A+B+C+D) от всех площадок сектора 291. Эти электрические сигналы, как и характер модуляции интенсивности излучения, при колебаниях объекта являются периодическими и близки к синусообразным. Поскольку световые пятна 121, 122, 123, проецируемые на транспарант, находятся на заданном расстоянии друг от друга и модуляции интенсивности излучения, связанного с пятнами 121, 122 и 121, 123, сдвинуты друг относительно друга по фазе на π/2, то три сигнала, получаемые от элементов E, (A+B+C+D) и F, также оказываются сдвинутыми относительно друг друга по фазе на π/2. Первичную обработку этих сигналов осуществляют известными способами. Она позволяет получить два синусообразных квадратурных сигнала, несущих информацию о величине и направлении перемещения транспаранта, которые можно представить в виде:
 ,
,
 ,
,
где 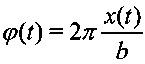 - фаза сигналов, x(t) - перемещение транспаранта вдоль дуги окружности, b - расстояние между метками транспаранта, Um - амплитуда сигналов. Обработку информации, содержащейся в фазе квадратурных сигналов, и вычисление измеряемого углового положения КЛ при условии регистрации значений U1 и U2 выполняют известными способами, в частности с помощью алгоритма реверсивного счета полос (Peck E.R., Obetz S.W. Wavelength or length measurement by reversible fringe counting // JOSA, 1953, 43, p. 505). На фиг. 7 представлен процесс такой обработки. Алгоритм включает операции преобразования сигналов U1 и U2 к дискретным сигналам S и C, а также формирования импульсов P и Q, соответствующих переходу дискретных сигналов из состояния логической "1" в состояние логического "0". Дополнительно сигналы S и C инвертируют и получают сигналы
- фаза сигналов, x(t) - перемещение транспаранта вдоль дуги окружности, b - расстояние между метками транспаранта, Um - амплитуда сигналов. Обработку информации, содержащейся в фазе квадратурных сигналов, и вычисление измеряемого углового положения КЛ при условии регистрации значений U1 и U2 выполняют известными способами, в частности с помощью алгоритма реверсивного счета полос (Peck E.R., Obetz S.W. Wavelength or length measurement by reversible fringe counting // JOSA, 1953, 43, p. 505). На фиг. 7 представлен процесс такой обработки. Алгоритм включает операции преобразования сигналов U1 и U2 к дискретным сигналам S и C, а также формирования импульсов P и Q, соответствующих переходу дискретных сигналов из состояния логической "1" в состояние логического "0". Дополнительно сигналы S и C инвертируют и получают сигналы  ,
,  , а также соответствующие им импульсы V и W. Ведется подсчет количества импульсов P, Q, V и W. При появлении каждого нового импульса согласно булевому выражению
, а также соответствующие им импульсы V и W. Ведется подсчет количества импульсов P, Q, V и W. При появлении каждого нового импульса согласно булевому выражению

формируют признак направления движения, который определяет алгебраический знак импульса при его подсчете. На фиг. 7 область МО представляет сигналы, получаемые при движении транспаранта в прямом направлении (М=0 - импульсы суммируются со знаком "+"), а область M1 - в обратном направлении (М=1 - импульсы суммируются со знаком "-"). Как видно из фиг. 7, на один период квадратурного сигнала приходятся четыре импульса P, Q, V и W. Поскольку этот период соответствует перемещению транспаранта вдоль дуги окружности на величину b, то каждый импульс соответствует перемещению транспаранта на величину b/4 в одну или в другую сторону в зависимости от знака. Величина b/4 является линейным разрешением системы вдоль описываемой транспарантом дуги окружности. Алгебраическая сумма импульсов представляет собой полное перемещение транспаранта вдоль дуги окружности относительно основания. Измеряемая величина углового положения КЛ оценивается с учетом этого перемещения и удаления l1 или h1 светового пятна 121 от оси вращения 3 (в зависимости от способа закрепления транспаранта). При использовании приведенного алгоритма выходной сигнал измерительной системы представляется в цифровой форме.
Первичная обработка электрических сигналов фотодетектора 29 осуществляется формирователем квадратурных сигналов (фиг. 8). Электрические сигналы от каждой из фоточувствительных площадок усиливаются предварительными усилителями 32-37. Сигналы от усилителей 32-35 суммируются и поступают на вход вторичного усилителя 38. Сигналы от усилителей 36 и 37 соответственно поступают на входы вторичных усилителей 39 и 40. Таким образом, усиленные сигналы на выходе элементов 38, 39, 40 соответствуют интенсивностям изображений световых пятен 121, 122, 123. Выходы усилителей 38 и 39 связаны со входами дифференциального усилителя 41, на выходе которого при колебаниях КЛ формируется синусный сигнал U1. Выходы усилителей 38 и 40 связаны со входами дифференциального усилителя 42, на выходе которого аналогично формируется косинусный сигнал U2. Дифференциальная схема усиления менее подвержена влиянию помех, воздействующих на фотодетектор и электрические линии, что позволяет повысить качество формируемых квадратурных сигналов и стабильность извлечения информации из них.
Блок преобразования квадратурных сигналов U1 и U2 (фиг. 9) вычисляет угловое положение КЛ, реализуя описанный ранее алгоритм. Сигналы U1 и U2 поступают на входы компараторов напряжений 43 и 44 соответственно, которые вырабатывают сигналы S и C. Выходы компараторов 43 и 44 связаны со входами вычислительного блока 45. Дополнительно выходы компараторов 43 и 44 связаны со входами инверторов 46 и 47 соответственно. Инверторы вырабатывают сигналы и , и их выходы также связаны со входами вычислительного блока 45. Вычислительный блок 45 формирует последовательность импульсов P, Q, V, W и определяет знак M каждого такого импульса. Выходы вычислительного блока 45 связаны со входами реверсивного счетчика 48, накапливающего число пришедших импульсов с учетом их знака. Накопленная сумма, характеризующая перемещение транспаранта вдоль дуги, поступает в арифметический блок 49, формирующий значение углового положения КЛ в цифровом виде с учетом удаления l1 или h1 светового пятна 121 от оси вращения 3 (в зависимости от способа закрепления транспаранта) и периода меток b. Формирователь квадратурных сигналов и блок обработки квадратурных сигналов преобразуют электрические сигналы, вырабатываемые фотодетектором, в измеряемое относительное угловое положение КЛ.
Для компенсации составляющей крутильных колебаний КЛ его относительное угловое положение вычитают из абсолютного углового положения, формируемого блоком 4 обработки сигналов КЛ, при помощи блока компенсации 11.
Было проведено экспериментальное исследование описанного ЛГ. Закрепление транспаранта осуществлялось способом, указанным на фиг. 1в, г. Габаритные размеры транспаранта составили 10×10×1,2 мм, а площадь рабочей области - менее 1 мм2. Объем оптико-электронной системы составил приблизительно 0,008 дм3. Параметры измерительной системы выбраны следующими: период измерительных меток транспаранта b=1,6 мкм, длина волны излучения лазера λ=0,78 мкм и удаление центрального светового пятна от оси вращения h1≈50 мм. Частота колебаний КЛ составляла величину f≈330 Гц. Угловое разрешение оптико-электронной системы для измерения относительного положения КЛ составило 1,65 угл. сек, что приблизительно соответствует угловому разрешению КЛ. Разрешение оптико-электронной системы в случае необходимости может быть увеличено за счет уменьшения периода b измерительных меток транспаранта (при существующих технологиях изготовления) и длины волны излучения лазера λ, а также за счет использования известных методов интерполяции квадратурных сигналов. Проведенное исследование подтвердило целесообразность компенсации составляющей, вносимой ВП, при помощи оптико-электронной системы для измерения относительного положения КЛ.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ компенсации движения виброподставки лазерного гироскопа и устройство для его реализации | 2020 |
|
RU2783617C1 |
| ОПТИЧЕСКИЙ ГИРОСКОП С ПАССИВНЫМ КОЛЬЦЕВЫМ РЕЗОНАТОРОМ | 1997 |
|
RU2124185C1 |
| Устройство для настройки датчика угловых скоростей лазерного | 2020 |
|
RU2737027C1 |
| Способ и устройство для Фурье-анализа жидких светопропускающих сред | 2021 |
|
RU2770415C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОЙ УГЛОВОЙ ОРИЕНТАЦИИ ПОДВИЖНОГО ОБЪЕКТА И ЛАЗЕРНЫЙ ИЗМЕРИТЕЛЬНЫЙ БЛОК | 1996 |
|
RU2112926C1 |
| МНОГОФУНКЦИОНАЛЬНАЯ ОПТИКО-ЛОКАЦИОННАЯ СИСТЕМА | 2005 |
|
RU2292566C1 |
| СПОСОБ НАВЕДЕНИЯ ЛИНИИ ВИЗИРОВАНИЯ ПРИЕМОПЕРЕДАТЧИКОВ АТМОСФЕРНОЙ ОПТИЧЕСКОЙ ЛИНИИ СВЯЗИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2774839C2 |
| АКУСТООПТИЧЕСКИЙ ДАТЧИК УГЛА | 1990 |
|
RU2029237C1 |
| СИСТЕМА УЛЬТРАЗВУКОВОГО КОНТРОЛЯ | 2010 |
|
RU2528578C2 |
| МНОГОКАНАЛЬНЫЙ КОНФОКАЛЬНЫЙ МИКРОСКОП (ВАРИАНТЫ) | 2014 |
|
RU2574863C1 |


Изобретение относится к области приборостроения и касается лазерного гироскопа с компенсацией составляющей, вносимой виброподставкой. Лазерный гироскоп (ЛГ) содержит кольцевой лазер (КЛ), устройство виброподставки, блок обработки сигналов КЛ, выход которого подключен к блоку компенсации, датчик параметров относительных крутильных колебаний КЛ в виде оптико-электронной системы определения положения КЛ. Оптико-электронная система включает в себя полупроводниковый лазер, дифракционную решетку, поляризационный светоделитель, отражающее зеркало, коллиматор, четвертьволновую пластину, фокусирующий объектив и оптический транспарант с измерительными метками, установленный на КЛ. В обратном ходе лучей от светоделителя последовательно установлены цилиндрическая линза и многоплощадный фотодетектор. Кроме того, ЛГ содержит блок автоматического регулирования размера световых пятен, формирователь квадратурных сигналов и блок преобразования квадратурных сигналов. Технический результат заключается в упрощении конструкции, повышении надежности и точности измерений. 9 ил.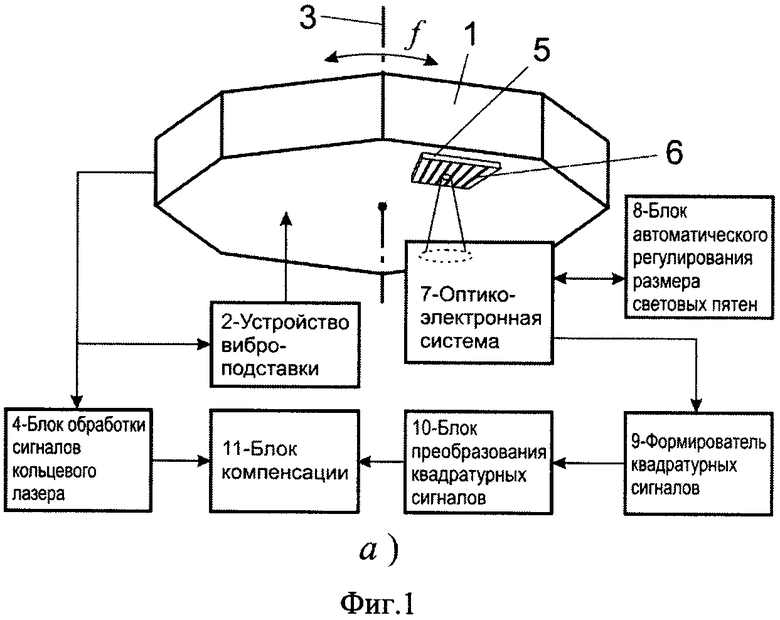
Лазерный гироскоп с компенсцией составляющей, вносимой виброподставкой, содержащий кольцевой лазер, соединенный с устройством виброподставки и блоком обработки сигналов кольцевого лазера, выход которого подключен к входу блока компенсации, датчик параметров относительных крутильных колебаний кольцевого лазера, отличающийся тем, что датчик параметров относительных крутильных колебаний кольцевого лазера выполнен в виде оптико-электронной системы определения смещения положения виброподставки, содержащей последовательно установленные по ходу луча оптической оси системы полупроводниковый лазер, дифракционную решетку, поляризационный светоделитель, отражающее зеркало под углом 45° к оси системы, коллиматор, четвертьволновую пластину, фокусирующий объектив, установленный с возможностью перемещения вдоль оси системы с помощью актюаторов и оптический транспарант, расположенный на кольцевом лазере, с измерительными метками, выполненными в виде прямых параллельных чередующихся первых поглощающих или частично поглощающих и вторых прозрачных полос, при этом ширина всех полос одинакова и период b, равный наименьшему расстоянию между двумя первыми или двумя вторыми полосами, связан с размером d центрального светового пятна соотношением 3b/4=d, или оптический транспарант с измерительными метками, выполненными в виде прямых параллельных чередующихся выступов прямоугольного сечения и впадин таких, что наименьшее расстояние между двумя выступами b равно наименьшему расстоянию между двумя впадинами, упомянутое расстояние b и ширина выступа, равная 3b/8, связаны с размером центрального светового пятна соотношением 3b/4=d, поверхности всех выступов лежат в первой плоскости, поверхности всех впадин лежат во второй плоскости, при этом первая и вторая плоскости параллельны, а расстояние между этими плоскостями составляет величину 0,75λ/4n, где λ - длина волны оптического излучения источника, а n - показатель преломления среды, в которой распространяется это излучение, и расположенный на торце или основании кольцевого лазера, причем в обратном ходе луча по оптической оси от поляризационного светоделителя установлены последовательно цилиндрическая линза и многоплощадный фотодетектор, при этом в лазерный гироскоп дополнительно введены блок автоматического регулирования размера световых пятен, формирователь квадратурных сигналов и блок преобразования квадратурных сигналов, причем один из входов блока автоматического регулирования размера световых пятен подключен к многоплощадному фотодетектору, а второй соединен с актюаторами фокусирующего объектива, оптико-электронная система через последовательно соединенные формирователь квадратурных сигналов и блок преобразования квадратурных сигналов соединена с вторым входом блока компенсации.
| US 4344706 A, 17.08.1982 | |||
| US 5331402 A1, 19.07.1994 | |||
| CN 102169127 A, 31.08.2011 | |||
| СПОСОБ ДИНАМИЧЕСКОГО ИЗМЕРЕНИЯ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 1997 |
|
RU2127867C1 |

