Изобретение относится к средствам контроля параметров вторичных систем управления движением воздушных судов.
В наземных системах наблюдения за воздушным движением широко применяются системы вторичной радиолокации (ВРЛ). Подобная система вторичной радиолокации состоит из двух основных частей: наземной станции и станции на борту летательного аппарата (ЛА). Наземная станция включает запросчик/приемник с радиостанцией (радиолокатор) и вращающейся антенной. Скорость вращения определяет частоту обновления информации. Станция, находящаяся на борту ЛА включает бортовой приемоответчик, который отвечает на запросы наземной станции. По принятым ответам наземная станция определяет координаты ЛА (наклонная дальность и азимут). Приемоответчики режима А/С передают код опознавания (режим А) и код барометрической высоты (режим С). Приемоответчик режима S передает отформатированные сообщения о местоположении ЛА (широте, долготе, высоте), курсе ЛА, и характеристиках движения. Приемники, работающие в режиме автоматического зависимого наблюдения (АЗН), принимают сквиттеры, излучаемые ЛА (пример ВРЛ - патенты RU 2122218, US 3883870 A).
Для настройки, регулировки и контроля функционирования ВРЛ применяются контрольные ответчики (КО). КО в общем виде представляет собой устройство, в состав которого входят: антенна, приемное устройство, дешифратор, шифратор, передающее устройство. КО принимает запросы, генерируемые ВРЛ, обрабатывает их и генерирует ответы с заданными заранее параметрами (бортовой номер, высота и т.д.). Так как координаты размещения антенны КО известны заранее, ВРЛ, приняв и расшифровав ответный сигнал от КО, формирует контрольную метку. Сравнивая измеренные координаты данной метки (азимут и дальность) с известными заранее эталонными можно судить о работоспособности ВРЛ и погрешностях измерения параметров ЛА.
Известен, например, контрольный радиолокационный ответчик (полезная модель RU 87541 U1).
Для контроля функционирования ВРЛ бывает необходимо оперативно изменять параметры ответных сигналов КО. Осуществляется это либо вручную, либо в автоматическом режиме дистанционно по проводной линии связи или по радиоканалу.
Ручное изменение параметров часто бывает сопряжено с неудобствами, так как КО может быть расположен в труднодоступном месте. По этой же причине затруднена передача сигналов по проводной линии связи, так как для ее прокладки требуется привлечение значительных ресурсов.
Задачей заявляемого изобретения является передача сигналов управления КО при помощи излучения ВРЛ по радиоканалу без повышения нагрузки на передатчик ВРЛ и без внесения дополнительных помех в эфир.
Указанная задача решается за счет того, что излучение сигналов управления КО ведется в диаграмме подавления и на нерабочей дальности ВРЛ.
Способ дистанционного управления параметрами контрольного ответчика с использованием излучения вторичного радиолокатора, в котором, согласно заявляемому изобретению, информация о параметрах в контрольный ответчик передается через канал подавления в направлении, противоположном направлению максимума диаграммы запроса на контрольный ответчик.
Способ дистанционного управления параметрами контрольного ответчика с использованием излучения вторичного радиолокатора, в котором, согласно заявляемому изобретению, передача информации о параметрах в контрольный ответчик осуществляется на нерабочей дальности.
Достигаемый технический результат: передача сигналов управления КО при помощи излучения ВРЛ по радиоканалу без повышения нагрузки на передатчик ВРЛ и без внесения дополнительных помех в эфир.
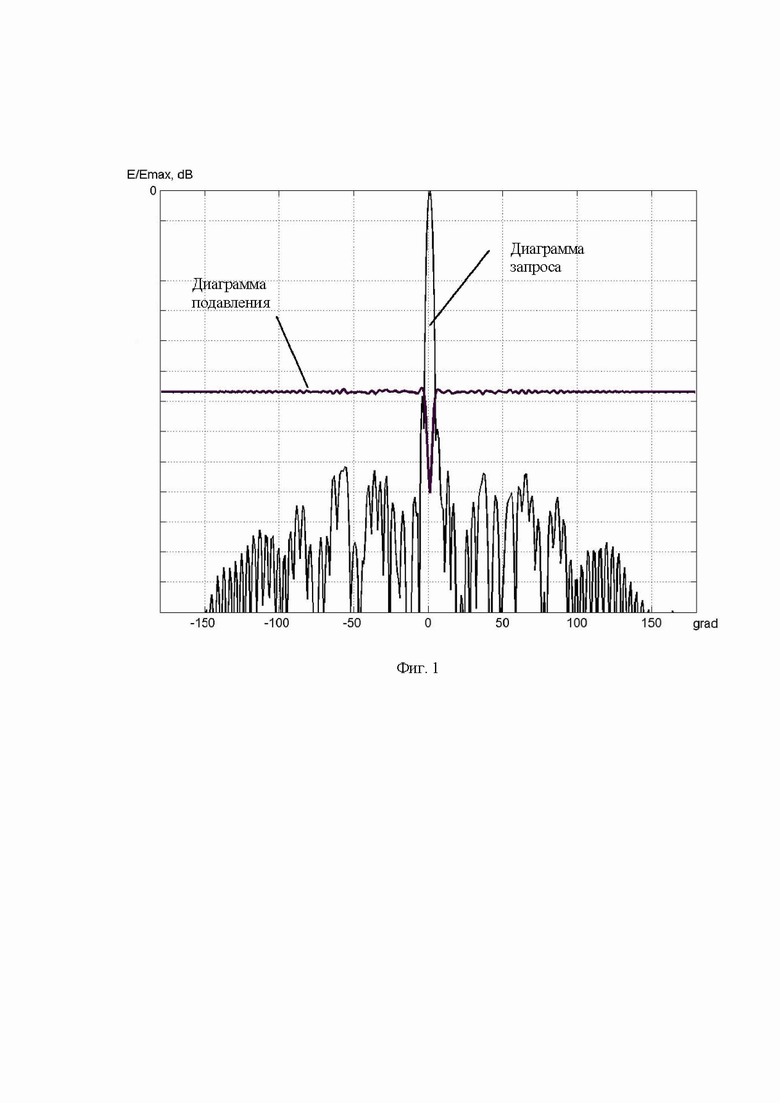
Данный способ передачи данных поясняется на фиг. 1.
ВРЛ формирует в пространстве две диаграммы направленности: диаграмму запроса и диаграмму подавления. Диаграмма запроса имеет вид узкого луча, который вращается по окружности с заданной постоянной скоростью. Таким образом, обеспечивается обзор воздушного пространства по всем азимутам.
Для подавления боковых лепестков диаграммы запроса используется диаграмма подавления. Она имеет круговую форму с резким провалом на месте луча диаграммы запроса. Именно диаграмму подавления, согласно заявляемому изобретению, предлагается использовать для передачи сигналов управления в КО.
Диаграмма подавления имеет максимальный уровень мощности в направлении, противоположном максимальному уровню мощности диаграммы запроса. Таким образом, сигналы управления находятся в области боковых лепестков диаграммы запроса и не оказывают влияния на взаимодействие с приемоответчиками летательных аппаратов.
Кроме того, передачу данных предлагается осуществлять на нерабочей дальности ВРЛ. Нерабочей дальностью называют отрезок дальности действия локатора, достижимый благодаря уровню излучаемой мощности, но превышающий заданную максимальную дальность. Передача сигналов на нерабочей дальности осуществляется следующим образом: сигнал излучается в конце периода запроса, после истечения времени, соответствующего максимальной дальности радиолокатора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Моноимпульсная вторичная радиолокационная система с режимом S | 2013 |
|
RU2606386C2 |
| КВАЗИМОНОИМПУЛЬСНЫЙ ВТОРИЧНЫЙ РАДИОЛОКАТОР | 2016 |
|
RU2622399C1 |
| АНТЕННО-ФИДЕРНОЕ УСТРОЙСТВО | 2008 |
|
RU2365002C1 |
| ВЫСОКОСКОРОСТНАЯ РАДИОЛИНИЯ ПЕРЕДАЧИ ИНФОРМАЦИИ С КОСМИЧЕСКИХ АППАРАТОВ ДИСТАНЦИОННОГО ЗОНДИРОВАНИЯ ЗЕМЛИ С АДАПТИВНОЙ БОРТОВОЙ АППАРАТУРОЙ | 2014 |
|
RU2551900C1 |
| Радиолокационная система метрового и низкочастотной части дециметрового диапазонов волн с системой опознавания | 2016 |
|
RU2650198C1 |
| Антенная система вторичного радиолокатора | 2015 |
|
RU2626221C2 |
| Антенная система радиолокационного комплекса | 2022 |
|
RU2794970C1 |
| Способ проверки работоспособности бортовой системы предупреждения столкновений | 2021 |
|
RU2779034C1 |
| Антенная система вторичного радиолокатора | 2020 |
|
RU2724368C1 |
| МНОГОПОЗИЦИОННАЯ СИСТЕМА ПОСАДКИ ВОЗДУШНЫХ СУДОВ | 2014 |
|
RU2558412C1 |
Изобретение относится к области создания средств контроля параметров вторичных систем управления движением воздушных судов.
Техническим результатом является передача сигналов управления контрольным ответчиком при помощи излучения вторичного радиолокатора (ВРЛ) по радиоканалу без повышения нагрузки на передатчик ВРЛ и без внесения дополнительных помех в эфир.
Заявлены способы дистанционного управления параметрами контрольного ответчика с использованием излучения вторичного радиолокатора. В первом варианте способа информация о параметрах в контрольный ответчик передается через канал подавления в направлении, противоположном направлению максимума диаграммы запроса на контрольный ответчик. Во втором варианте передача информации о параметрах в контрольный ответчик осуществляется на нерабочей дальности. 2 н.п. ф-лы, 1 ил.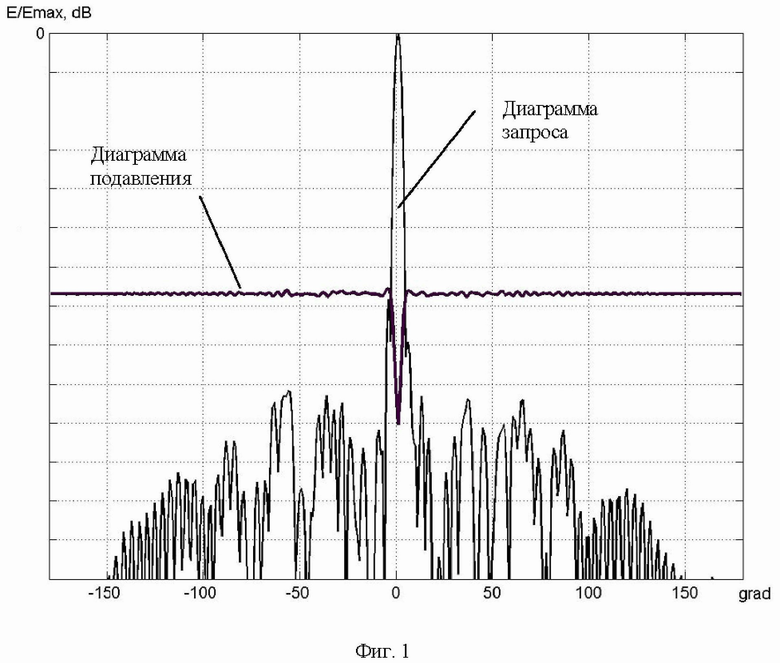
1. Способ дистанционного управления параметрами контрольного ответчика с использованием излучения вторичного радиолокатора, отличающийся тем, что информация о параметрах в контрольный ответчик передается через канал подавления в направлении, противоположном направлению максимума диаграммы запроса на контрольный ответчик.
2. Способ дистанционного управления параметрами контрольного ответчика с использованием излучения вторичного радиолокатора, отличающийся тем, что передача информации о параметрах в контрольный ответчик осуществляется на нерабочей дальности.
| СПОСОБ РАДИОЛОКАЦИОННОГО ЗАПРОСА - ОТВЕТА И ЗАПРОСЧИК ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1989 |
|
RU2029971C1 |
| Станок для полирования изделий с криволинейными поверхностями | 1950 |
|
SU87541A1 |
| 0 |
|
SU163188A1 | |
| СПОСОБ РАДИОЛОКАЦИОННОГО АКТИВНОГО ЗАПРОСА-ОТВЕТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1978 |
|
RU2022296C1 |
| Способ обработки хлопчатобумажного корда | 1957 |
|
SU116650A1 |
| Моноимпульсная вторичная радиолокационная система с режимом S | 2013 |
|
RU2606386C2 |
| US 3883870 A, 13.05.1975 | |||
| JPS 61108984 A, 27.05.1986 | |||
| Прямоточно-центробежный сепаратор | 1976 |
|
SU598624A1 |

