Изобретение относится к авиации, конкретно к многопозиционным системам посадки воздушных судов (ВС) в условиях сложного рельефа местности и плохой видимости. Известна система посадки ВС стандарта ILS (Журнал «Проблемы безопасности полетов», 1998, №4, 5, 12; MLS products are back in business 1997, №9), используемая на стационарных аэродромах международного класса. Недостатком известной системы ILS является сложность и высокая стоимость наземного оборудования, жесткая программа захода на посадку, включая движение по глиссаде, а также влияние на погрешности определений отклонений экранного эффекта от подвижных и стационарных объектов в районе ВГШ.
Известна система посадки воздушных судов (US №6469654, МПК: G01S 13/76; G01S 13/91; G01S 3/46, 2002), так называемая транспондерная система TLS. Система посадки TLS в первую очередь предназначена для установки там, где трудно обеспечить требуемые точности приземления ВС по условиям рельефа местности в районе аэродрома. При этом система TLS использует стандартное бортовое оборудование ВС, что является достоинством данной системы посадки. В различных странах мира на аэродромах со сложным рельефом местности уже несколько лет эксплуатируются системы TLS.
Работа известной системы TLS основана на использовании аппаратуры вторичной радиолокации (ВРЛ). При этом в районе взлетно-посадочной полосы (ВПП) устанавливают маломощный запросчик системы вторичной радиолокации (ВРЛ), который запрашивает воздушные суда (ВС), находящиеся в зоне посадки. По задержке прихода ответного сигнала определяют дальность, а для определения угла места и азимута применяется аппаратура, использующая фазометрический метод измерения углов. Для идентификации ВС, заходящих на посадку, диспетчер вводит в TLS бортовой номер ВС. Для обеспечения требуемой точности определения координат местоположения ВС используется сложная обработка информации с использованием Калмановской нелинейной фильтрации. По координатам местоположения ВС рассчитывают его отклонение от расчетной глиссады. Рассчитанные отклонения ВС от глиссады передаются на борт по линии передачи сигналов управления (ЛПСУ) в формате сигналов системы посадки ILS, которые принимаются бортовыми приемниками курса и глиссады системы ILS и дальше передаются в систему автоматического управления (САУ) ВС или выводятся на индикацию пилоту. Таким образом, система TLS обеспечивает посадку ВС, используя при этом стандартное бортовое оборудование.
Недостатком системы посадки TLS является фазометрический способ измерения углов, который требует применения достаточно сложных антенн и аппаратуры, поэтому стоимость TLS превосходит стоимость ILS.
Аналогом изобретения является многопозиционная система посадки воздушных судов (США №5017930, B64D 45/04; B64F 1/18; G01S 1/16; G01S 1/18; G01S 13/74; G01S 13/88; G01S 13/91; G01S 19/48; G01S 3/02; G01S 5/00; G01S 5/14; G08G 5/02; 1991), содержащая наземный запросчик и не менее четырех наземных приемников ответных сигналов, соединенных по выходам через сигнальную линию связи с наземной ЭВМ управления, управляющий выход которой через радиолинию управления посадкой воздушного судна соединен с бортовой аппаратурой воздушного судна, включающей бортовую аппаратуру управления воздушным судном и бортовой ответчик, соединенный через радиолинию «запрос-ответ» с наземным запросчиком, причем ЭВМ управления снабжена модулем расчета координат воздушного судна (ВС) и отклонения его от траектории посадки. При этом два приемника ответных сигналов ВС расположены перпендикулярно оси ВПП, в районе ее центра, а другие приемники расположены на продолжении оси ВПП по одному с каждой стороны захода на посадку ВС и на некотором удалении от торца ВГШ. Таким образом, приемники ВРЛ на поверхности аэродрома образуют букву "Т". Местоположение всех приемников точно определено в аэродромной декартовой системе координат. Современные геодезические приборы позволяют делать привязку с точностью единицы сантиметров. Поэтому точно известно время передачи сигналов от приемников в центральный вычислитель, которое в дальнейшем учитывается при расчете местоположения ВС. Принцип действия прототипа заключается в следующем. Запросчик запрашивает ВС, находящиеся в зоне посадки. Все приемники и запросчик синхронизированы системой единого времени. По задержке прихода ответного сигнала определяются дальности до ВС. Так же, как и в системе TLS, по бортовому номеру осуществляется идентификация ВС, заходящих на посадку. Для определения координат местоположения ВС используется метод Калмановской нелинейной фильтрации (Балакришнан А.В. Теория фильтрации Калмана. Издательство: Мир, 1988, 86 с.). По координатам местоположения ВС рассчитывают его отклонение от заданной траектории посадки по курсу и глиссаде. Рассчитанные отклонения ВС передаются на борт по линии передачи сигналов управления (ЛПСУ) в формате сигналов системы посадки ILS, которые принимаются бортовыми приемниками курса и глиссады системы ILS и дальше передаются в бортовую систему автоматического управления (САУ) ВС или выводятся на индикацию его пилоту.
Данная система посадки имеет недостаточную надежность безопасного вывода ВС на ВПП, связанную с высокими погрешностями в определении местоположения ВС.
Это связано с тем, что особенностью системы вторичной радиолокации (ВРЛ), используемой в системах посадки ВС, является то, что при формировании ответного сигнала, например, в режиме «RBS» или режиме «S» в бортовых ответчиках возникают существенные задержки, которые являются детерминированными (постоянными) для конкретного ответчика ВС. Величина задержки в пересчете на дальность может достигать 150 м. Такие задержки не приемлемы для систем посадки, где местоположение ВС должно определяться с точностью несколько метров. Как показано выше, для расчетов местоположения ВС в прототипе изобретения используется Калмановская фильтрация. При этом в вектор состояния включают три координаты местоположения ВС, три скорости изменения координат местоположения ВС по соответствующим осям аэродромной системы координат (СК), а также задержку ответного сигнала ВРЛ. В теории Калмановской фильтрации существует понятие "наблюдаемость", которое определяет возможность получения оценок вектора состояния по имеющимся измерениям. Для определения наблюдаемости Калмановских фильтров был разработан (Красовский А.А., Белоглазов И.Н., Чигин Г.П. Теория корреляционно-экстремальных навигационных систем. - М.: Наука, 1979) необходимый и достаточный критерий. В соответствии с этим критерием ранг матрицы, составленной из матрицы вектора наблюдения и матриц производных вектора наблюдения, должен быть равен размерности вектора состояния синтезируемого фильтра. В данном случае вектор состояния, включающий указанную выше задержку ответного сигнала, будет не наблюдаем, т.е. Калмановским методом величину задержки ответного сигнала ВРЛ определить невозможно. Таким образом, рассматриваемая система посадки будет иметь большие погрешности в определении местоположения ВС.
Наиболее близким по техническому решению является многопозиционная система посадки воздушных судов (патент RU №2489325). Система содержит наземный запросчик, соединенный через радиолинию с бортовой аппаратурой управления воздушным судном, и не менее трех наземных приемников ответных сигналов, соединенных с наземной ЭВМ управления. Бортовая аппаратура управления воздушным судном соединена через радиолинию управления посадкой с ЭВМ, а также содержит бортовой ответчик, соединенный с бортовым измерителем высоты воздушного судна и с радиолинией и «запрос» и «ответ». Бортовой измеритель высоты воздушного судна содержит барометрический, радио и/или лазерный высотомер. Рабочее место пилота включает индикаторное устройство, органы ручного и автоматизированного управления полетом воздушным судном и средства радиосвязи, соединенные с радиолинией управления посадкой. Радиолиния выполнена в виде двунаправленной радиолинии обмена данными «борт-земля». ЭВМ управления снабжена модулем расчета координат воздушного судна и отклонения его от траектории посадки на основе измерений высоты полета воздушного судна и разности дальностей до воздушного судна относительно местоположений запросчика и приемников ответных сигналов. Повышается точность вывода воздушного судна на взлетно-посадочную полосу за счет снижения погрешностей в определении местоположения воздушного судна. Прототип имеет те же недостатки, что и рассмотренные выше системы типа TLS, а именно высокую погрешность в определении местоположения ВС, связанную с использованием системы «запрос-ответ». Заявленная погрешность измерений, равная 1 м, недостижима при указанном способе измерений, так как требует измерения задержки по времени с точностью 3 нс. Использование для вычисления координат ВС высотомера не устраняет этот недостаток по следующим причинам: барометрический высотомер не может быть использован для точного захода на посадку, так как измеряет барометрическую высоту, а именно разность давлений на данной высоте и давления аэродрома, которое может быть выставлено со значительной ошибкой; радиовысотомер и лазерный высотомер измеряют высоту а точнее расстояние до подстилающей поверхности, что в реальных условиях, особенно в горных районах и при наличии оврагов, неизбежно вызывает ошибки в определении высоты до уровня ВПП. Кроме того, следует учитывать, что высота передается от бортового ответчика дискретно.
Цель данного технического предложения состоит в устранении указанных недостатков и, таким образом, в повышении точности и надежности измерения координат, необходимых для успешной посадки на аэродромы, расположенные в местности со сложным рельефом и в сложных метеоусловиях при отсутствии прямой видимости ВПП.
Повышение точности измерения координат достигается за счет жесткой привязки к шкале единого времени и учета дифференциальных поправок.
Указанная цель достигается тем, что наземная часть многопозиционной системы посадки воздушных судов включает в себя не менее четырех наземных приемопередающих радиостанций, оборудованных высокоточными синхронизированными часами, как и ВС, заходящие на посадку. Наземные приемопередающие радиостанции, наземная ЭВМ и радиостанции, находящиеся на борту ВС, образуют сеть из линий передачи данных, причем координаты наземных радиостанций заранее известны с высокой точностью. Наземные приемопередающие радиостанции разнесены на достаточное расстояние друг от друга и являются вершинами многоугольника, в центре которого расположена ВПП.
Воздушные суда в составе бортового оборудования имеют высокоточные высотомеры малых высот, а также задатчик траектории захода на посадку и бортовую ЭВМ, соединенную с автопилотом приводами рулей и внутрикабинными индикаторами.
Посылки радиостанций строго синхронизированы, привязаны к моментам единого времени и содержат данные об идентификационных номерах источников информации и поправку на задержку в радиотракте.
На наземной ЭВМ по величине задержки принятого кодированного сообщения каждой наземной станцией вычисляют соответствующую псевдодальность до ВС и поправку на величину систематической задержки, решают уравнения псевдодальностей и вычисляют координаты ВС, которые передают на борт соответствующих ВС.
На борту ВС по величине задержек принятых кодированных сообщений от каждой наземной станции вычисляются соответствующие псевдодальности до наземных приемопередающих радиостанций и поправки на величину систематической задержки, решают уравнения псевдодальностей и вычисляют координаты ВС.
Бортовая ЭВМ по измеренным координатам вычисляет отклонения от заданной траектории в горизонтальной и вертикальной плоскостях, формирует управляющие воздействия для корректировки указанных отклонений и передают их на автопилот для отработки приводами соответствующих рулевых поверхностей, а также для индикации на штатном бортовом командном авиагоризонте или на иных индикаторах.
На заключительном этапе захода на посадку, когда ВС находится в пределах ВПП или ее продолжения для вычисления отклонений от заданной траектории в вертикальной плоскости, используются показания высокоточного радиовысотомера малых высот или лазерного высотомера, измеряющего высоту от уровня поверхности ВПП.
Заявленный способ поясняется чертежами, на которых показаны:
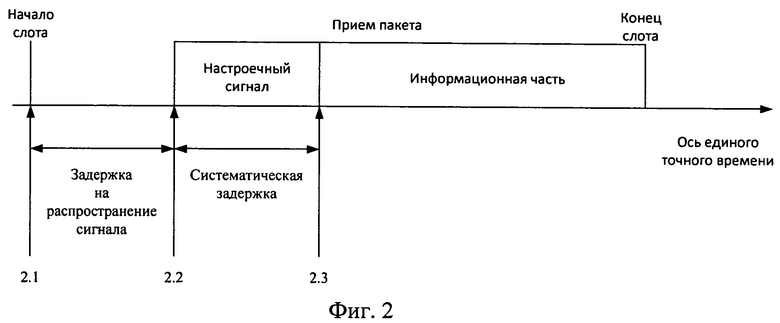
фиг. 1 поясняет обмен информации между ВС и наземными радиостанциями.
фиг. 2 поясняет составляющие временной задержки.
Результаты поиска известных решений в данной и смежных областях техники с целью выявления признаков, совпадающих с отличительными от прототипа признаками, показали, что они не следуют явным образом из уровня техники. Из уровня техники также не выявлена известность влияния предусматриваемых существенными признаками изобретения преобразований на достижение указанного технического результата. Следовательно, изобретение соответствует условию патентоспособности "изобретательский уровень".
В условиях непрерывно возрастающей интенсивности полетов, увеличения скорости полетов и пассажировместимости ВС, а также применения новой практики полетов по свободным траекториям возрастают требования к регулярности и безопасности полетов, в том числе при заходе на посадку.
Известные пути решения этой проблемы состоят во включении в состав бортового оборудования приемопередающих радиостанций, работающих в диапазоне УКВ или СВЧ и транслирующих по цифровой линии передачи данных (ЛПД) с временным разделением информацию о своем местоположении и параметров движения, а также прослушивающих эфир и принимающих сообщения от других радиостанций, в том числе от наземных.
Такие системы относятся к системам автоматического зависимого наблюдения (АЗН), примером которых является ADS с линией VDL режима 4, описанная в книге «Автоматизированные системы управления воздушным движением: Новые информационные технологии в авиации»: Учебное пособие / P.M. Ахмедов, А.А. Бибутов, А.В. Васильев и др.; Под ред. С.Г. Пятко и А.И. Красова. - СПб.: Политехника, 2004, с. 191-203. Эти системы свободны от недостатков, присущих системам вторичной радиолокации, использующих принцип «запрос-ответ» за счет строгой привязки к сверх точной шкале единого времени.
Многопозиционная система посадки работает следующим образом.
На борту ВС, находящемся в зоне аэродрома, с помощью задатчика выставляют траекторию захода на посадку, которая может представлять собой уравнение, связывающее координаты время и такой параметр как дальность до некоторой точки на ВПП, в качестве которой может использоваться контрольная точка аэродрома (КТА) или координаты торца ВПП.
При автоматическом зависимом наблюдении в вещательном диапазоне (АЗН-В), как известно, шкалу единого времени разделяют на временные отрезки или слоты, определенное количество которых составляют кадры (фреймы) и суперкадры (суперфреймы).
В заранее зарезервированных слотах (Фиг. 2) радиопередатчик ВС транслирует свой идентификационный номер и другие данные, причем момент начала посылки (Фиг. 2. 2.1) известен и строго фиксирован по шкале единого времени. Каждая наземная радиостанция прослушивает эфир и фиксирует момент прихода посылки от ВС (Фиг. 2. 2.2). Так как моменты времени фиксированы, то определяется время запаздывания и псевдодальности от ВС до каждой из наземных приемопередающих радиостанций.
Для вычисления неизвестных координат ВС xa, ya, za решают систему уравнений для m псевдодальностей вида:

где С - скорость света в вакууме;
τа - величина ухода бортовых часов;
Δi - дифференциальная поправка для i-й наземной радиостанции, которая вычисляется как разность между псевдодальностью между i-й и другими радиостанциями и геометрическим расстоянием между ними.
Pia - псевдодальность, вычисляемая как Pia=Cτia, где τia - задержка сигнала на приемном конце относительно начала соответствующего слота с учетом систематической составляющей τс (Фиг. 2. 2.1-2.3).
Дифференциальные поправки Δi вычисляются для каждой из радиостанций по парным измерениям псевдодальностей от указанной радиостанции до каждой из остальных.
Так как число неизвестных координат с добавлением неизвестной величины ухода бортовых часов равно четырем, то для их отыскания количество уравнений m должно быть не менее четырех. Соответственно количество наземных радиостанций должно быть не менее четырех.
Способы решения уравнений для псевдодальностей известны. Они используются для решения аналогичных по форме уравнений, например, в приемниках спутниковых систем GPS и ГЛОНАСС.
Воздушные суда в составе бортового оборудования имеют высокоточные высотомеры малых высот, а также задатчик траектории захода на посадку, и бортовую ЭВМ, соединенную с автопилотом приводами рулей и внутрикабинными индикаторами.
Перед заходом на посадку с помощью задатчика устанавливают одну из возможных траекторий захода на посадку, которая удовлетворяет требованиям безопасного пролета препятствий в районе аэродрома. Бортовая ЭВМ по измеренным координатам вычисляет отклонения от заданной траектории в горизонтальной и вертикальной плоскостях, формирует управляющие воздействия для корректировки указанных отклонений и передает их на автопилот для отработки приводами соответствующих рулевых поверхностей, а также для индикации на штатном бортовом командном авиагоризонте или на иных индикаторах.
Таким образом, в соответствии с предлагаемым техническим решением на борту ВС получают точную и достоверную информацию об отклонениях от заданной траектории захода на посадку.
Интенсивность обмена данными по радиоканалу может составлять несколько раз в секунду. В случае высокой интенсивности воздушного движения возможно использование многоканальных радиостанций.
Тем самым при использовании заявленного технического решения обеспечивается заход на посадку и посадка в автоматическом и полуавтоматическом режимах, за счет чего возрастает уровень безопасности движения, и, следовательно, оказывается возможным и полезным реализация заявленного технического результата.
| название | год | авторы | номер документа |
|---|---|---|---|
| Многопозиционная система посадки воздушных судов | 2015 |
|
RU2608183C1 |
| МНОГОПОЗИЦИОННАЯ СИСТЕМА ПОСАДКИ ВОЗДУШНЫХ СУДОВ | 2011 |
|
RU2489325C2 |
| СИСТЕМА ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2023 |
|
RU2809110C1 |
| Многопозиционная система посадки летательных аппаратов | 2019 |
|
RU2717284C2 |
| СПОСОБ АВИАЦИОННОЙ БЛИЖНЕЙ РАДИОНАВИГАЦИИ | 2021 |
|
RU2778179C1 |
| МНОГОПОЗИЦИОННАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ВОЗДУШНЫХ СУДОВ | 2014 |
|
RU2584689C1 |
| СПОСОБ ИНДИКАЦИИ ПОЛОЖЕНИЯ ОБЪЕКТОВ НАБЛЮДЕНИЯ | 2006 |
|
RU2333538C2 |
| Способ автоматической посадки воздушного судна | 2023 |
|
RU2839178C2 |
| Способ определения геометрической высоты полета при заходе летательного аппарата на посадку | 2016 |
|
RU2620590C1 |
| ЛЕТНО-МОДЕЛИРУЮЩИЙ ПИЛОТАЖНЫЙ КОМПЛЕКС | 2006 |
|
RU2310909C1 |
Многопозиционная система посадки воздушных судов содержит не менее четырех наземных приемопередающих радиостанций с высокоточными синхронизированными часами, расположенных в точках, известных с высокой точностью и являющихся вершинами многоугольника, в центре которого расположена взлетно-посадочная полоса. Воздушные суда (ВС), заходящие на посадку, содержат приемопередающую радиостанцию, высокоточный высотомер малых весов, задатчик траектории захода на посадку, бортовую ЭВМ, соединенную с автопилотом приводами рулей и внутрикабинными индикаторами. Обеспечивается высокий уровень безопасности при посадки ВС. 6 з.п. ф-лы, 2 ил.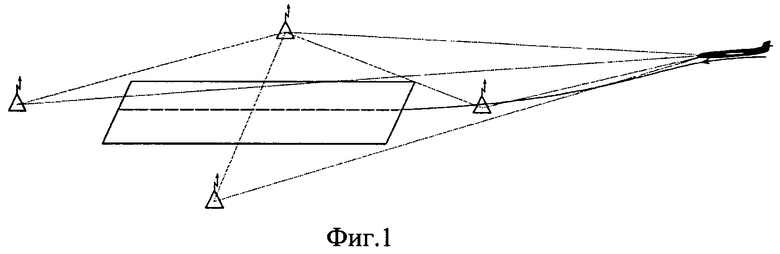
1. Многопозиционная система посадки воздушных судов, содержащая не менее четырех наземных приемопередающих радиостанций, оборудованных высокоточными синхронизированными часами, а также приемопередающие радиостанции, расположенные на каждом из бортов ВС, заходящих на посадку, которые образуют сеть из линий передачи данных, включая наземную ЭВМ, отличающаяся тем, что указанные наземные приемопередающие радиостанции расположены в точках, координаты которых заранее известны с высокой точностью, причем указанные точки, разнесены на достаточном расстоянии друг от друга и являются вершинами многоугольника, в центре которого расположена ВПП.
2. Многопозиционная система по п. 1, отличающаяся тем, что воздушные суда в составе бортового оборудования имеют высокоточные высотомеры малых высот, а также задатчик траектории захода на посадку, и бортовую ЭВМ, соединенную с автопилотом приводами рулей и внутрикабинными индикаторами.
3. Многопозиционная система по п. 1, отличающаяся тем, что посылки радиостанций строго синхронизированы, привязаны к моментам единого времени и содержат данные об идентификационных номерах источников информации, а также поправку на задержку в радиотракте.
4. Многопозиционная система по п. 1, отличающаяся тем, что на наземной ЭВМ по величине задержки принятого кодированного сообщения каждой наземной станцией вычисляют соответствующую псевдодальность до ВС с учетом величины систематических задержек и дифференциальных поправок, которые вычисляют по задержке в приемопередаче сигналов от одной наземной радиостанции к другой, а также по геометрическому расстоянию между ними, решают уравнения псевдодальностей и вычисляют координаты ВС, которые передают на борт соответствующих ВС.
5. Многопозиционная система по п. 1, отличающаяся тем, что на борту ВС по величине задержек принятых кодированных сообщений от каждой наземной станции вычисляются соответствующие псевдодальности до наземных приемопередающих радиостанций с учетом величины систематических задержек, решают уравнения псевдодальностей и вычисляют координаты ВС.
6. Многопозиционная система по п. 1, отличающаяся тем, что бортовая ЭВМ по измеренным координатам вычисляет отклонения от заданной траектории в горизонтальной и вертикальной плоскостях, формирует управляющие воздействия для корректировки указанных отклонений и передает их на автопилот для отработки приводами соответствующих рулевых поверхностей, а также для индикации на штатном бортовом командном авиагоризонте или на иных индикаторах.
7. Многопозиционная система по п. 1, отличающаяся тем, что на заключительном этапе захода на посадку, когда ВС находится в пределах ВПП или ее продолжения, для вычисления отклонений от заданной траектории в вертикальной плоскости используются показания высокоточного высотомера малых высот, измеряющего высоту от уровня поверхности ВПП.
| МНОГОПОЗИЦИОННАЯ СИСТЕМА ПОСАДКИ ВОЗДУШНЫХ СУДОВ | 2011 |
|
RU2489325C2 |
| ПРЕЦИЗИОННАЯ СИСТЕМА ПОСАДКИ ДЛЯ НАВЕДЕНИЯ САМОЛЕТА ВДОЛЬ ЗАДАННОЙ ПОСАДОЧНОЙ ТРАЕКТОРИИ В ПРЕДЕЛАХ РАДИУСА ДЕЙСТВИЯ НАЗЕМНОГО ЗАПРОСЧИКА (ВАРИАНТЫ) | 1992 |
|
RU2100820C1 |
| КОМПЛЕКСНЫЙ СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2012 |
|
RU2510518C1 |
| RU 2011152274 А, 20.07.2013 | |||

