Объект настоящего изобретения представляет собой машина для абразивной струйной обработки поверхностей крупноразмерных обрабатываемых деталей.
Определения
Термин «крупноразмерная обрабатываемая деталь» в настоящем описании означает обрабатываемую деталь, у которой каждый из трех геометрических размеров составляет по меньшей мере 1000 мм, и поверхности которой подвергают абразивной струйной обработке.
Термин «исполнительный механизм» или «исполнительный наконечник» следует понимать как исполнительный механизм для абразивной струйной обработки.
Термин «струя абразивного материала» означает струю зерен абразивного материала, имеющих кинетическую энергию, которую обеспечивает исполнительный наконечник.
Термин «средство для обработки» означает струю абразивного материала, которую производит исполнительный механизм, и которая непосредственно воздействует на поверхность обрабатываемой детали. Далее в настоящем документе термины «струя абразивного материала» и «средство для обработки» будут использоваться взаимозаменяемым образом.
Термин «активная область» означает область, на которую поступает средство для обработки при соударении с поверхностью обрабатываемой детали. Любые изменения кинематических параметров струи абразивного материала производят воздействие на активную область.
Термин «вектор скорости средства для обработки» означает сумму векторов скорости всех зерен в составе струи абразивного материала. Вектор скорости определяет точку контакта и направление средства для обработки.
Термин «пневматическая обработка» означает пневматическую струйную обработку с применением дробеструйной форсунки. Согласно технологии пневматической абразивной струйной обработки кинетическую энергию абразивного материала обеспечивают посредством сжатого воздуха. Абразивный материал выходит при высокой скорости из дробеструйной форсунки (дробеструйной фурмы), с которой соединен транспортировочный гибкий шланг, подающий смесь абразивного материала и воздуха.
Термин «исполнительный механизм дробеструйной форсунки» означает конец воздушного шланга, через который выходит абразивный материал, обладающий кинетической энергии. Он представляет собой исполнительный механизм, используемый для пневматической абразивной струйной обработки. Дробеструйные форсунки обычно представляют собой трубки Вентури, изготовленные из стойкого к абразивному износу материала. Исполнительный механизм этого типа используется для пневматической абразивной струйной обработки. В обычных используемых машинах присутствует пневматическая струйная камера, выполненная с возможностью пневматической обработки крупноразмерных обрабатываемых деталей.
Термин «турбинная обработка» означает механическую абразивную струйную обработку с применением активной турбины.
Термин «исполнительный механизм активной турбины» означает устройство, которое приводит в действие электрический двигатель, и которое передает кинетическую энергию абразивного материала посредством вращения активной турбины с лопастями. Исполнительный механизм этого типа используется для турбинной абразивной струйной обработки.
Термин «турбинная струйная машина» означает обычно используемую машину, выполненную с возможностью турбинной обработки. Пространство, в котором или через которое движутся обрабатываемые детали, на которые воздействуют активные турбины, называется горячей областью турбинной струйной машины.
Настоящее изобретение относится к технологии турбинной абразивной струйной обработки, используемой для обработки поверхностей крупноразмерных обрабатываемых деталей. Абразивная струйная обработка представляет собой способ механической обработки, который используется для достижения разнообразных эффектов обработки, таких как удаление примесей (представляющих собой ржавчину, отложения или старые покрытия), подготовка поверхности (придание шероховатости) перед нанесением защитных и/или декоративных металлических слоев и/или органических слоев, сглаживание неровностей, очистка, формование или армирование поверхности. Любые зернистые абразивные материалы или другие средства для обработки могут быть использованы в качестве абразивного материала. Абразивная струйная технология находит широкое применение в промышленности, включая процессы производства и обновления, причем она используется, в частности, для обработки поверхностей крупноразмерных обрабатываемых деталей.
Помимо турбинной технологии, пневматическая технология также находит широкое применение. Согласно пневматической технологии кинетическая энергия обеспечивается сжатым воздухом, в то время как в турбинной технологии используются турбины, которые производят струю абразивного материала, причем эллиптическая активная область, создаваемая на обрабатываемой поверхности, имеет более значительные размеры, чем круглая область, которую создает форсунка в пневматической технологии. Воздушная форсунка может работать в ручном режиме, в котором движение воздушной форсунки в дробеструйной камере может быть автоматизировано и осуществлено с применением роботов.
В известных из литературы предшествующего уровня техники дробеструйных камерах для пневматической обработки крупноразмерных обрабатываемых деталей присутствуют камера для обработки (рабочая камера), оборудованная фильтрационной системой удаления пыли, система рециркуляции абразивного материала, пневматическая струйная машина (одна или несколько), система управления и исполнительная система. Рабочая камера представляет собой пространство, в котором операции могут выполнять операторы в ручном режиме или манипуляторы, вследствие высокой скорости выхода абразивного материала и высокой интенсивности сопровождающего шума и образования пыли. Ударная энергия абразивного материала рассеивается в рабочей камере. Рабочая камера представляет собой пространство, устойчивое к механическим ударам абразивного материала. Примерная рабочая камера представляет собой стальную конструкцию, защищенную изнутри каучуковыми панелями. Рабочая камера содержит входные ворота, технологические дверцы и освещение. Помимо прочих компонентов, в примерной системе рециркуляции абразивного материала присутствуют напольная (горизонтальная) транспортировочная система для абразивного материала, вертикальная транспортировочная система для абразивного материала, система очистки (удаления пыли и классификации абразивного материала по размерам зерен) и контейнер для очищенного абразивного материала. В примерной напольной транспортировочной системе для абразивного материала предусмотрено движение скребков в коридорах. В качестве исполнительной системы присутствует дробеструйная форсунка (исполнительный механизм или исполнительный наконечник), а питание обеспечивает свободный воздушный шланг (дробеструйная фурма) в соединении с пневматическим очищающим устройством. Обрабатываемая деталь занимает неподвижное положение, а исполнительный механизм выполнен с возможностью движения внутри камера для обработки в целях направления средства для обработки (струи абразивного материала) на выбранные поверхности обрабатываемой детали. Другими словами, средство для обработки является подвижным и направленным. Вектор подхода средства для обработки может не иметь определенного направления, т.е. быть произвольно направленным. Изменение модуля вектора скорости средства для обработки может быть осуществлено посредством изменения скорости абразивного материала (рабочего давления) и изменения расстояния от обработанной поверхности. Исполнительный механизм в камерах движется внутри рабочего пространства.
Существуют известные решения, согласно которым крупноразмерные обрабатываемые детали подвергают обработке в дробеструйных камерах, оборудованных одной или несколькими дробеструйными форсунками для повышения эффективности обработки. Дробеструйная форсунка выполнена с возможностью движения и ручного управления оператором, который держит фурму в руках, или согласно другим решениям дробеструйная форсунка может направляться посредством регулируемых механизмов (например, роботов), выполняющих разработанную программу или работающих в соответствии с ней. Обрабатываемая деталь может вращаться независимо от движения форсунки.
Согласно турбинной технологии исполнительная система (исполнительный механизм) представляет собой активную турбину, которая с применением сочетания радиальных и тангенциальных сил передает абразивному материалу кинетическую энергию посредством вращения турбины с лопастями. Внутри тела активной турбины также присутствует разделительный ротор, коаксиальный с активной турбиной, несущий ответственность за разделение абразивного материала и обеспечение первоначального направления и ускорения зерен абразивного материала. Коаксиально расположенная регулировочная втулка также содержит выпускное окно для абразивного материала, через которое выходит абразивный материал. Положение этой втулки определяет угол выхода струи абразивного материала в направлении обрабатываемой детали.
В отличие от пневматических камер в турбинных струйных машинах предшествующего уровня техники исполнительный механизм (активная турбина) занимает неподвижное положение, а обрабатываемая деталь находится в движении таким образом, что на поверхности поступает производимое исполнительным механизмом средство для обработки (струя абразивного материала). Другими словами, средство для обработки является стационарным. Вектор подхода средства для обработки является однонаправленным. Изменение модуля вектора скорости средства для обработки может быть осуществлено посредством изменения скорости выхода (переменной скорости вращения турбины). В известных турбинных струйных машинах исполнительный механизм установлен снаружи рабочее пространство. В исключительных случаях исполнительный механизм может иметь переменный угол (вектор) взаимодействия посредством изменения угла в плоскости ротора при изменении положения регулировочной втулки или изменении положения всей турбины. В обоих случаях диапазон движения является ограниченным вследствие неподвижного положения турбины и ее размещения снаружи камеры для обработки.
В документе ЕР3132895 раскрыта пескоструйная система, содержащая активную турбину, которую приводит в действие аксиально расположенный приводной двигатель. Активная турбина установлена на камере, в которой происходит очистка. Активная турбина может осуществлять маятниковые движения в ограниченной степени. Изменение угла осуществляется перпендикулярно по отношению к плоскости ротора.
В документе US3604157A раскрыто устройство для обработки поверхности, содержащее камеру для обработки и средство для транспортировки обрабатываемой детали, имеющей поверхность, подлежащую обработке, внутри указанной камеры. Для очистки используется активная турбина, которая может осуществлять маятниковое движение в ограниченной степени. Турбина выполнена с возможностью доступа к определенным выбранным поверхностям обрабатываемой детали.
Существуют известные решения, согласно которым обработка крупноразмерных обрабатываемых деталей происходит в турбинных струйных машинах, в которой, как правило, множество активных турбин устанавливают таким образом, чтобы создавать область, на которую воздействуют средства для обработки (струи абразивного материала), и через которую проходит обрабатываемая деталь, совершая вращательное или поступательное движение. В результате этого струи абразивного материала покрывают поверхности обрабатываемой детали в процессе движения.
В литературе предшествующего уровня техники существуют известные примеры, в которых активная турбина расположена внутри рабочего корпуса на линейной оси, но это решение имеет весьма ограниченный диапазон приложений.
Преимущество пневматических струйных камер в отношении обработки крупноразмерных обрабатываемых деталей заключается в том, что камеры для обработки практически не имеют ограничений размеров, и в результате этого струи абразивного материала могут быть оптимальным образом направлены на обрабатываемые поверхности. Однако преимущество турбинных струйных машин заключается в том, что обработка осуществляется без необходимости обслуживания, и для самого процесса требуется пропорционально меньшее количество энергии для очистки такой же поверхности.
Вследствие своей массы активная турбина не может управляться в ручном режиме (за исключением применения струйной машины на горизонтальной поверхности). По этой причине, как правило, обрабатываемая деталь находится в движении перед неподвижной турбиной.
Для обработки с применением неподвижной активной турбины снижается коэффициент использования энергии, когда в определенном рабочем пространстве осуществляется обработка обрабатываемых деталей, имеющих меньшие размеры, чем допускают номинальные размеры камеры. Это объясняется тем, что неподвижные турбины выпускают абразивный материал в постоянном определенном режиме, и некоторая часть материала не попадает на поверхность обрабатываемой детали. Чтобы уменьшить это неблагоприятное явление, в случае обрабатываемых деталей меньших размеров могут быть использованы такие операции, как отключение выбранных турбин или изменение направления выпуска струи абразивного материала, причем это не всегда оказывается возможным, в частности, когда расстояние между турбиной и обрабатываемой деталью является постоянным, что происходит вследствие неподвижной природы турбины.
Ограничение пневматической обработки в ручном режиме заключается в том, что она расходует много энергии и является трудоемкой. Роботизация процесса несколько улучшает положение в отношении расхода энергии (при том условии, что оптимально осуществляется перекрывание между соседними областями), но программирование оказывается весьма трудоемким вследствие соотношения между размером активной области и размером обрабатываемой поверхности. Пневматический дробеструйный робот должен осуществлять быстрые движения по относительно длинной траектории. Однако размер обрабатываемых деталей представляет собой ограничение турбинной струйной обработки. Это обусловлено необходимостью увеличения числа турбин в случае крупноразмерных обрабатываемых деталей и сложных форм обрабатываемых деталей, и с этим связаны повышение сложностью машины и необходимость применения очень высокой мощности, превосходящей требуемые эксплуатационные характеристики машины, а также неравномерные технологические параметры в зависимости от расстояния между обрабатываемой поверхностью и турбинами, уменьшение коэффициента использования энергии и чрезмерный расход абразивного материала в случае обработки обрабатываемых деталей, имеющих размеры, которые составляют менее чем номинальные.
Является общепризнанным, что коэффициент использования энергии в случае турбинной струйной обработки в несколько десятков раз выше, чем в случае пневматической обработки. Активная турбина, имеющая относительно низкое энергопотребление, производит средство для обработки (струю абразивного материала) с более сильным и равномерным действием. Однако использование активных турбин в известных в настоящее время решениях ограничено их массой (их невозможно эксплуатировать в ручном режиме), а также современными известными способами введения абразивного материала. У пользователей машин для абразивной струйной обработки существует потребность в машине, в которой присутствует активная турбина, представляющая собой исполнительный механизм, который движется в рабочем пространстве посредством кинематического механизма и производит средство для обработки (струю абразивного материала) с переменным положением воздействия.
Основную идею настоящего изобретения представляет собой машина для абразивной струйной обработки поверхности крупноразмерных обрабатываемых деталей, в которой содержатся корпус, образующий рабочую камеру, кинематический механизм для движения исполнительного механизма, система рециркуляции абразивного материала, система, подающая рециркулированный абразивный материал в исполнительный механизм, фильтрационная система для рабочей камеры и система управления машиной, содержащая кинематический механизм.
Эта машина отличается тем, что кинематический механизм представляет собой регулируемый многокомпонентный механизм, содержащий по меньшей мере четыре оси, который завершает исполнительный механизм, и тем, что исполнительный механизм представляет собой активную турбину, которая производит средство для обработки и направляет его на обрабатываемую деталь. Благодаря этому исполнительный механизм с переменным положением и направлением взаимодействия производит средство для обработки (струю абразивного материала) и оптимальным образом направляет его на поверхность обрабатываемой детали, расположенной в рабочей камере.
Предпочтительно многокомпонентный кинематический механизм содержит общий кинематический механизм в двуосной прямоугольной системе координат в горизонтальной плоскости и местный кинематический механизм, присоединенный к общему кинематический механизму и осуществляющий местное движение активной турбины, установленной на местный кинематический механизм, причем многокомпонентный кинематический механизм предоставляет активной турбине по меньшей мере четыре степени свободы.
Предпочтительно местный кинематический механизм содержит телескопический блок для движения активной турбины в вертикальном направлении и вращающийся механизм для вращения телескопический блок вокруг вертикальной оси, причем местный кинематический механизм предоставляет активной турбине две степени свободы. В общем кинематическом механизме могут присутствовать направляющая, установленная на корпус, движущаяся балка, выполненная с возможностью движения вдоль направляющей, и движущаяся тележка, выполненная с возможностью движения вдоль движущейся балки, причем движущаяся тележка содержит местный кинематический механизм, и общий кинематический механизм предоставляет местному кинематическому механизму две степени свободы.
Активная турбина может содержать механизм изменения угла выпуска струи, содержащий регулировочную втулку, оборудованную выпускным отверстием, и приводной блок для изменения углового положения регулировочной втулки, направляющей средство для обработки, причем средство для обработки получает дополнительную степень свободы по отношению к активной турбине.
Многокомпонентный кинематический механизм может быть оборудован локальным механизмом, представляющим собой механизм для отклонения активной турбины по отношению к горизонтальной оси на консоли, и, таким образом, для изменения расстояния между активной турбиной и вертикальной осью, вокруг которой вращается телескопический блок, и в результате этого активная турбина и средство для обработки получают дополнительную степень свободы.
Многокомпонентный кинематический механизм может быть оборудован локальным механизмом, представляющим собой механизм для регулирования углового движения активной турбины вокруг оси консоли, представляющей собой продольную ось консоли, на которой установлена активная турбина, и в результате этого активная турбина и средство для обработки получают дополнительную степень свободы. Локальный механизм обеспечивает изменение направления эллиптической активной области на обрабатываемой поверхности и, таким образом, предоставляет средству для обработки дополнительную степень свободы.
Эта машина отличается тем, что система для питания активной турбины абразивным материалом содержит общий блок и местный блок, оборудованный самотечным питающим шлангом, который расположен вдоль телескопического блока, причем самотечный питающий шланг может содержать верхнюю секцию, нижнюю секцию и открытую секцию переменной длины в зависимости от выдвижения телескопического блока. Общий блок питающей системы может быть соединен с общим кинематическим механизмом, и местный блок питающей системы может быть соединен с местным кинематическим механизмом.
В верхней секции самотечного шланга верхний вертикальный канал самотечного питающего шланга может быть присоединен к верхней части телескопического блока, в то время как в нижней секции самотечного шланга нижний вертикальный канал самотечного питающего шланга может быть расположен рядом с активной турбиной, причем верхний вертикальный канал и нижний вертикальный канал являются съемными и расположены на переменном расстоянии друг от друга в зависимости от положения телескопического блока, а выпуск из верхнего вертикального канала и впуск в нижний вертикальный канал расположены коаксиально.
Верхняя секция самотечного шланга может быть оборудована регулировочным клапаном для абразивного материала. Местной блок питания турбины может содержать промежуточный резервуар, выполненный с возможностью самотечного питания питающего шланга.
Промежуточный резервуар может присоединяться к телескопическому блоку и вращаться с телескопическим блоком.
Общий блок питания турбины может содержать главный резервуар, продольный ленточный конвейер, принимающий абразивный материал из главного резервуара и расположенный вдоль направляющей, и поперечный ленточный конвейер, расположенный вдоль движущейся балки, причем движущаяся балка может быть оборудована скребком для абразивного материала, падающего с продольного ленточного конвейера на поперечный ленточный конвейер, и движущаяся тележка может быть оборудована скребком для абразивного материала, падающего с поперечного ленточного конвейера в промежуточный резервуар.
Общий блок питания турбины может быть оборудован главным резервуаром, причем промежуточный резервуар может быть выполнен с возможностью подачи абразивного материала в активную турбину с циклическими перерывами и циклической подачи непосредственно из главного резервуара.
Общий блок питания турбины может быть оборудован главным резервуаром и гибким пневматическим шлангом, присоединенным к главному резервуару, причем выпуск гибкого пневматического шланга может быть направлен в промежуточный резервуар.
В системе рециркуляции абразивного материала может присутствовать скребковая напольная система (горизонтальная) для транспортировки абразивного материала, оборудованная скребками, осуществляющими движение в коридорах.
Система рециркуляции абразивного материала может содержать вспомогательный подъемник, который соединяет первичный резервуар, подающий абразивный материал через регулировочный клапан, с продольным ленточным конвейером.
Настоящее изобретение согласно данной заявке удовлетворяет современную потребность в решениях в области эффективного, безопасного, энергосберегающего и автоматизированного процесса абразивной обработки крупноразмерных обрабатываемых деталей, для которых пневматическая обработка оказывается недостаточно эффективной или неэкономичной, а обработка в существующих турбинных струйных машинах с эксплуатацией активных турбин, расположенных снаружи рабочей камеры, оказывается неэффективной или даже невозможной. В рабочем пространстве обладающий высокой эффективностью и высокой мощностью исполнительный механизм (активная турбина) движется посредством верхнего регулируемого или автоматизированного кинематического механизма, чтобы направлять оптимальное воздействие средства для обработки (струи абразивного материала) на обрабатываемые поверхности. Машина согласно настоящему изобретению допускает применение эффективного исполнительного механизма с фиксированным положением обрабатываемой детали в течение обработки. Активная турбина может двигаться и ориентироваться в рабочей камере произвольным образом, и при этом вектор подхода средства для обработки может быть переменным в точке контакта, причем его направление и модуль могут быть изменены, чтобы оптимизировать его эффективность, повышать равномерность обработки или, наоборот, снижать ее в случае селективной обработки, что в совокупности обеспечивает разнообразные приложения или применения машины для крупноразмерных обрабатываемых деталей, имеющих сложные геометрические формы. Настоящее изобретение описано более подробно в предпочтительных вариантах осуществления, проиллюстрированных на фигурах, причем:
на фиг.1 представлена машина для абразивной струйной обработки поверхности крупноразмерных обрабатываемых деталей на перспективном изображении;
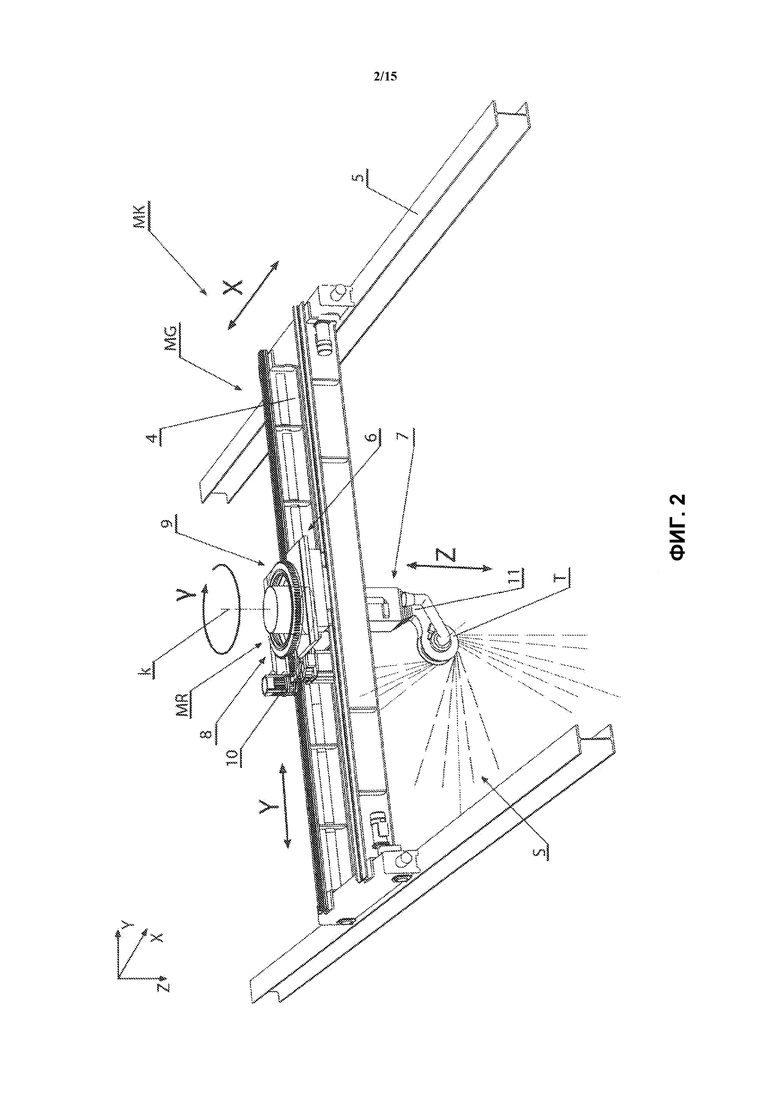
на фиг.2 представлен многокомпонентный кинематический механизм машины согласно фиг.1;
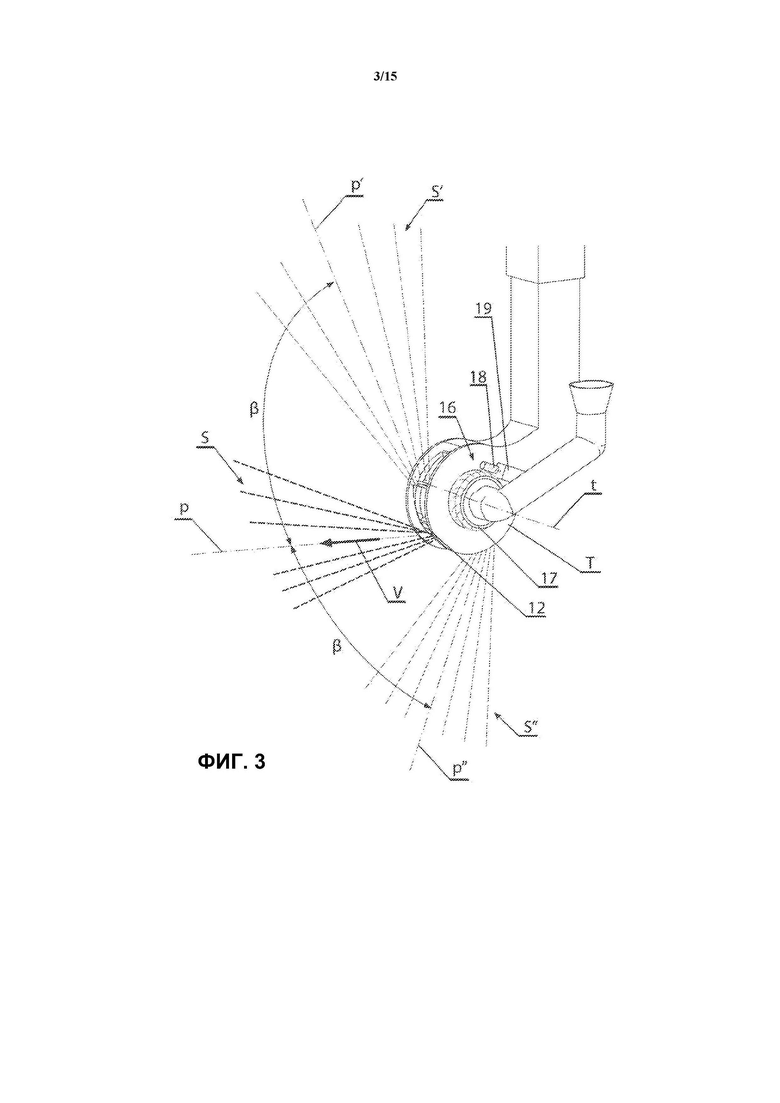
на фиг.3 представлено перспективное изображение локального механизма для изменения угла выпуска струи абразивного материала из активной турбины;
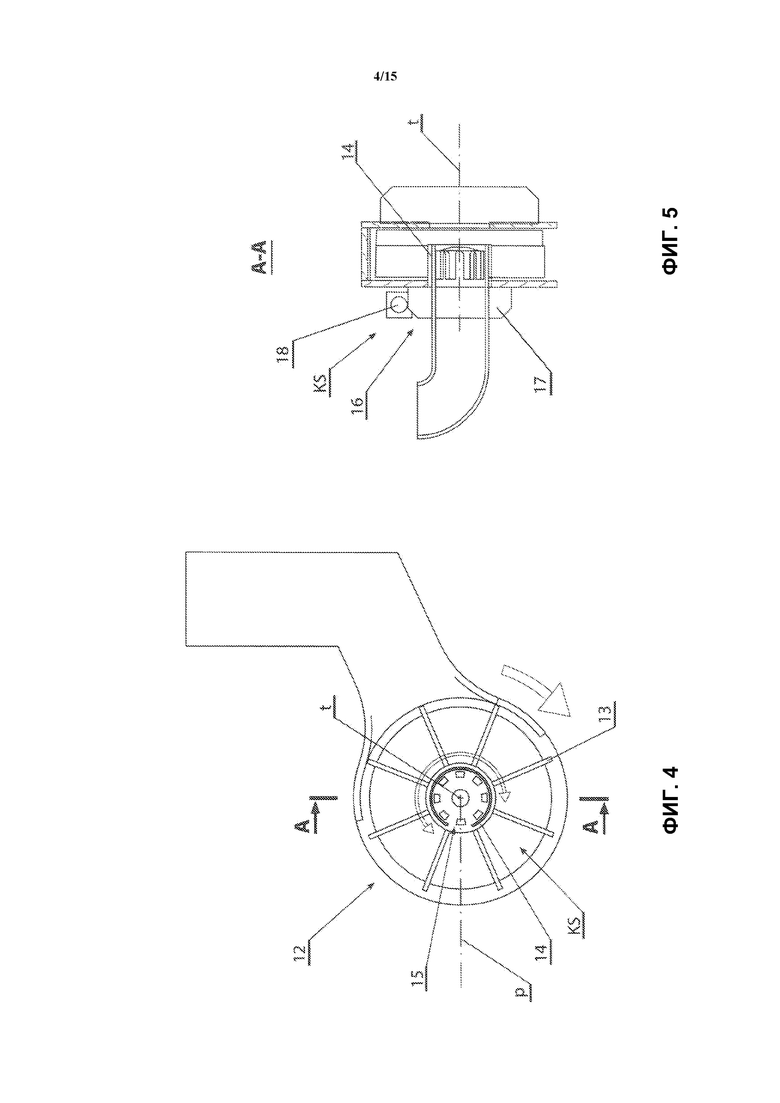
на фиг.4 и 5 представлена активная турбина в перпендикулярном к оси сечении и в аксиальном сечении;
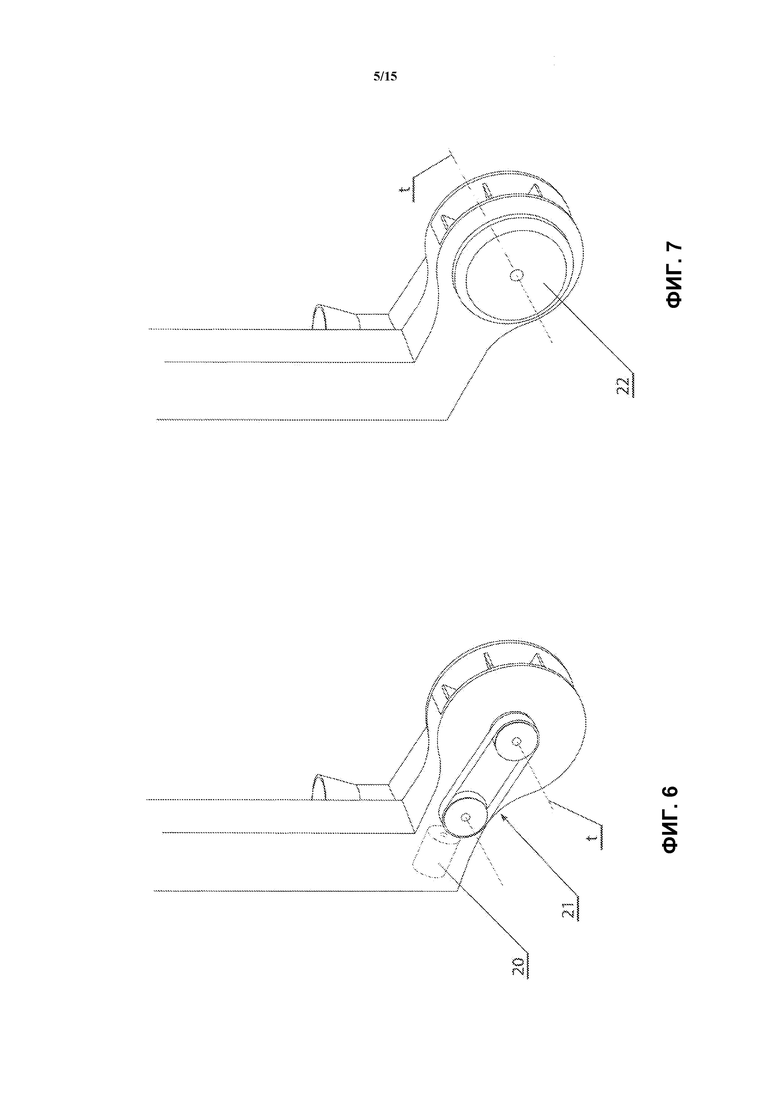
на фиг.6 и 7 представлены варианты приводных блоков активной турбины;
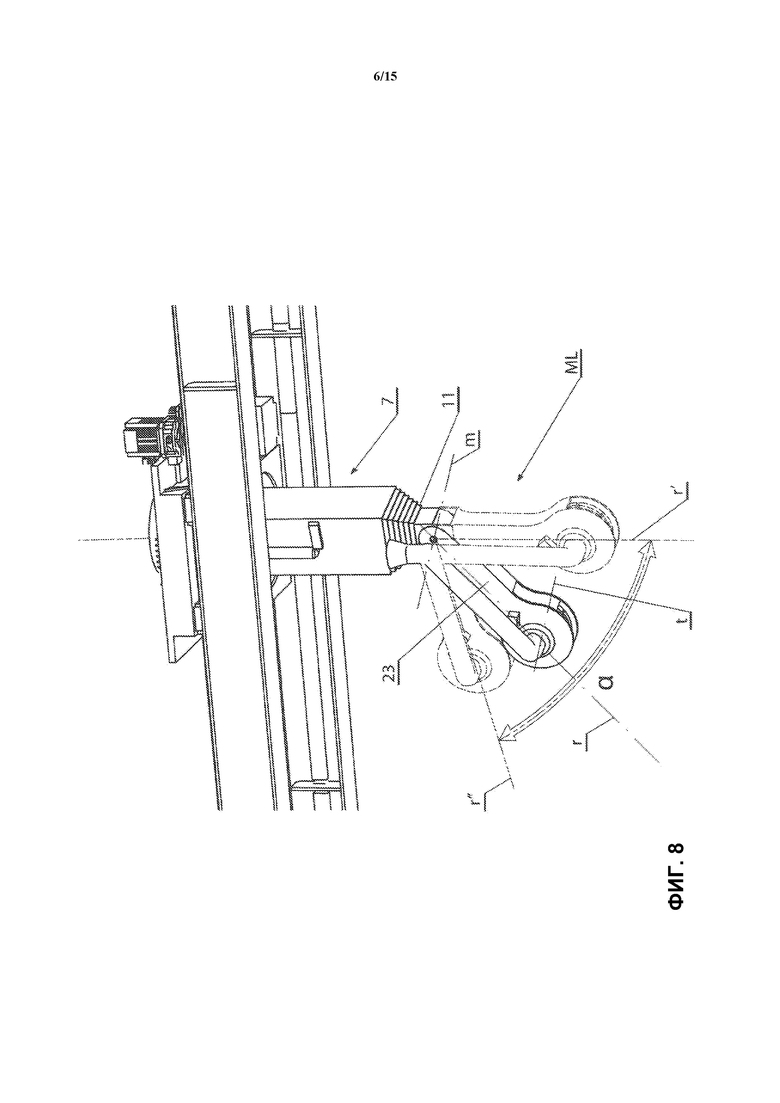
на фиг.8 представлен локальный механизм удаленного движения активной турбины по отношению к вертикальной оси телескопического устройства;
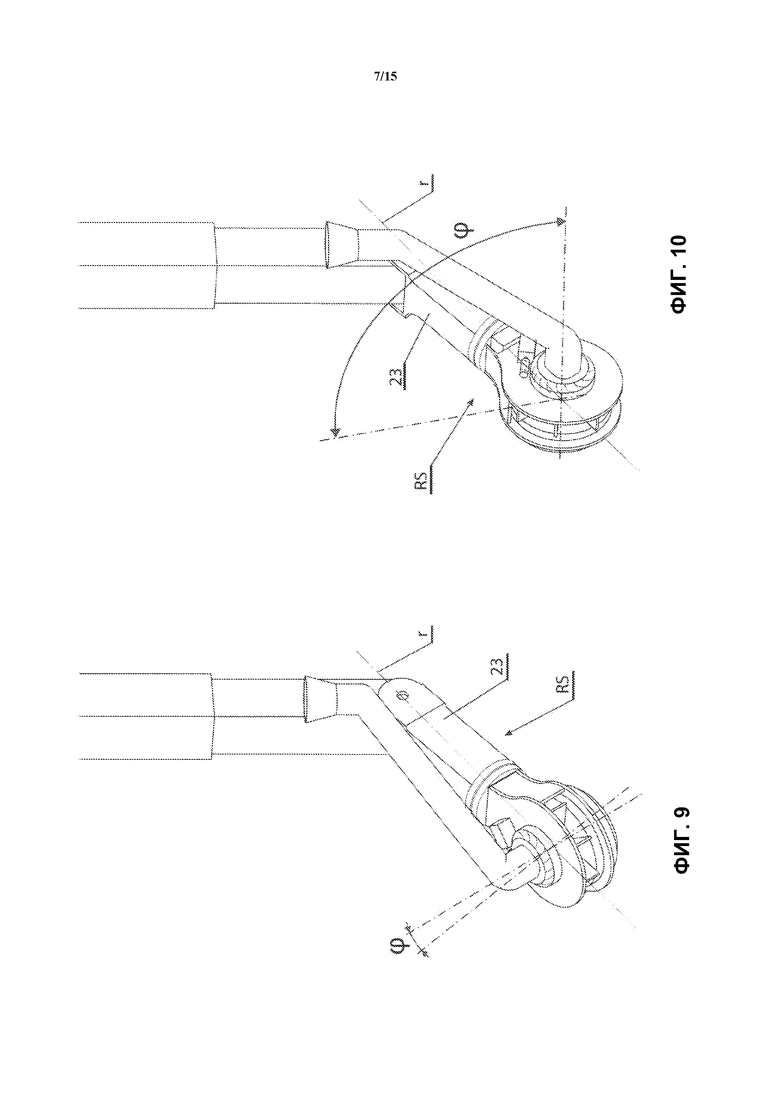
на фиг.9 и 10 представлен локальный механизм для изменения углового положения активной турбины в диапазоне от 0 до 90° вокруг оси консоли для локального крепления;
на фиг.11 представляет местный блок системы для питания активной турбины абразивным материалом;
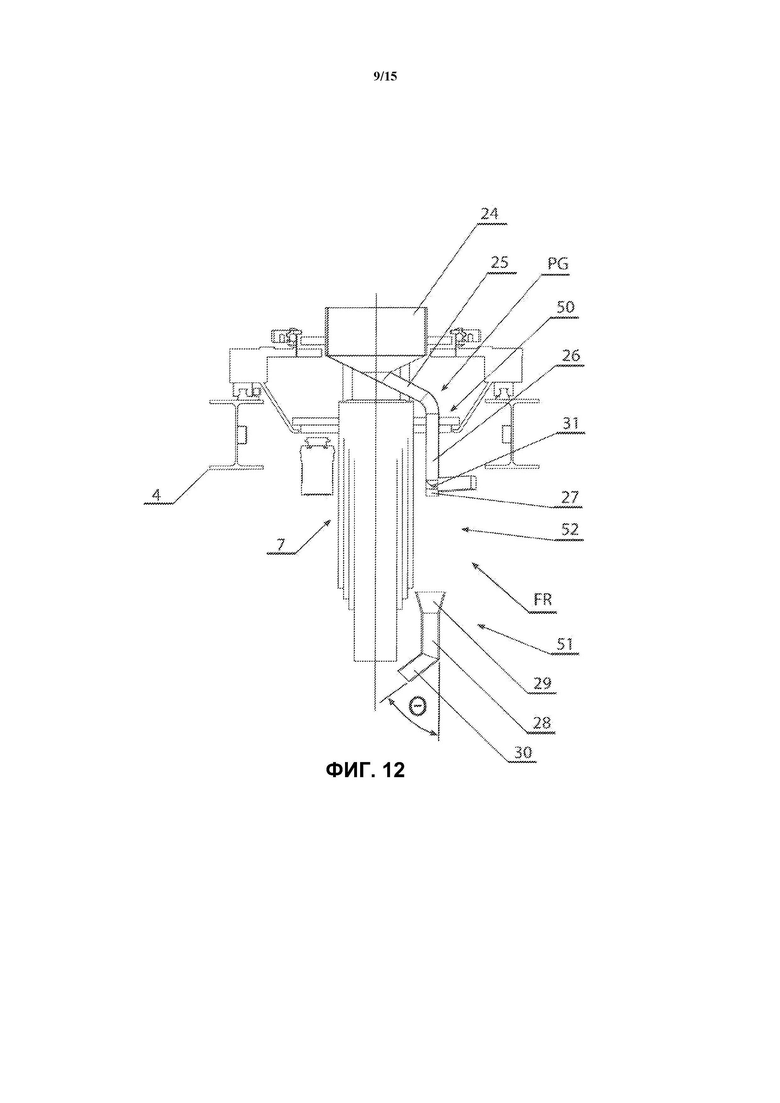
на фиг.12 представлено изображение поперечного сечения местного блока системы для питания активной турбины абразивным материалом;
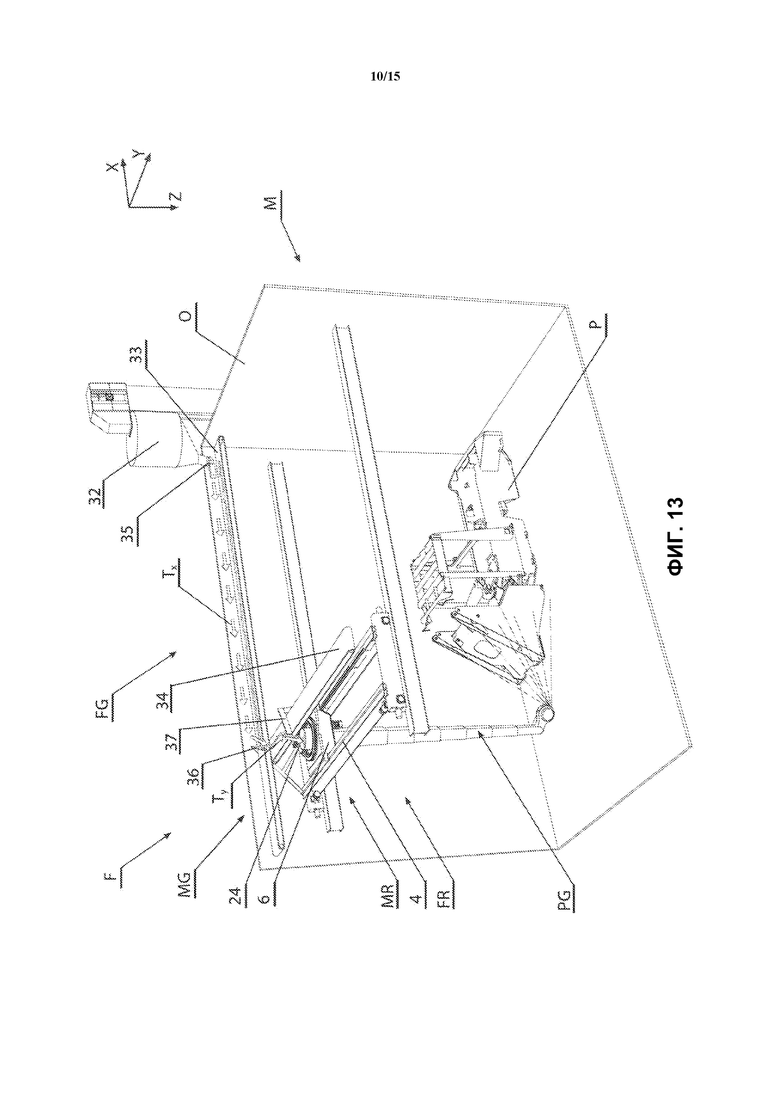
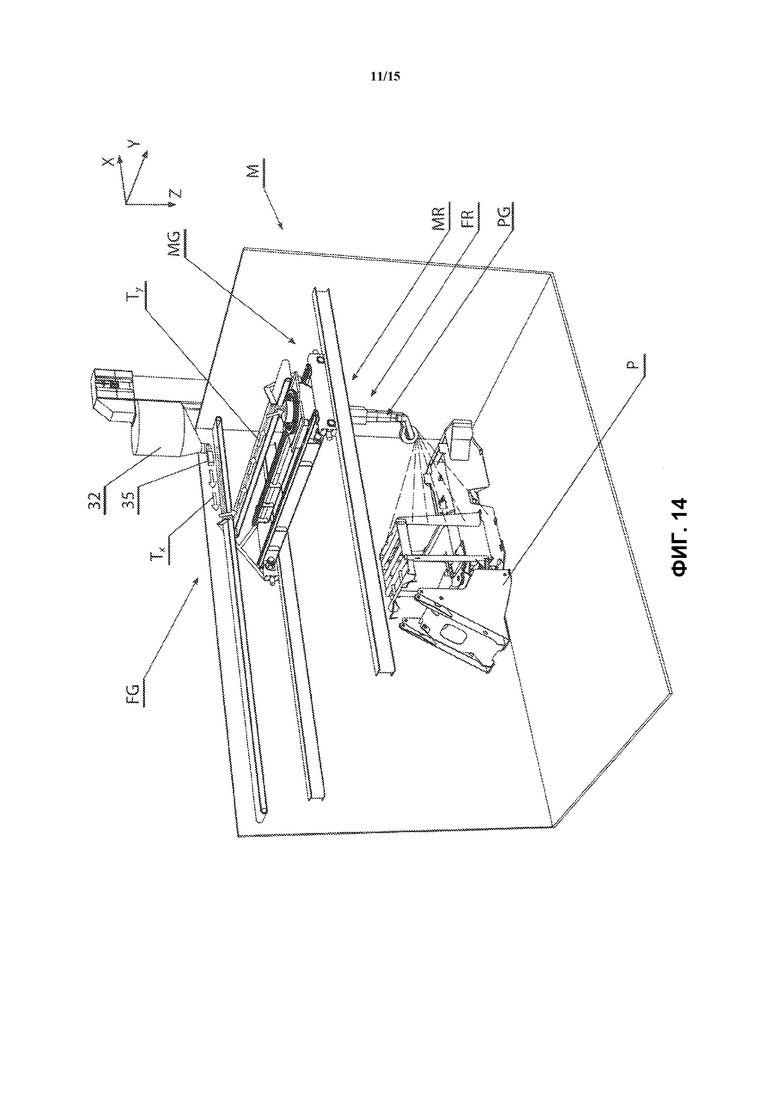
на фиг.13 и 14 представлена питающая система с общим блоком в варианте ленточного конвейера;
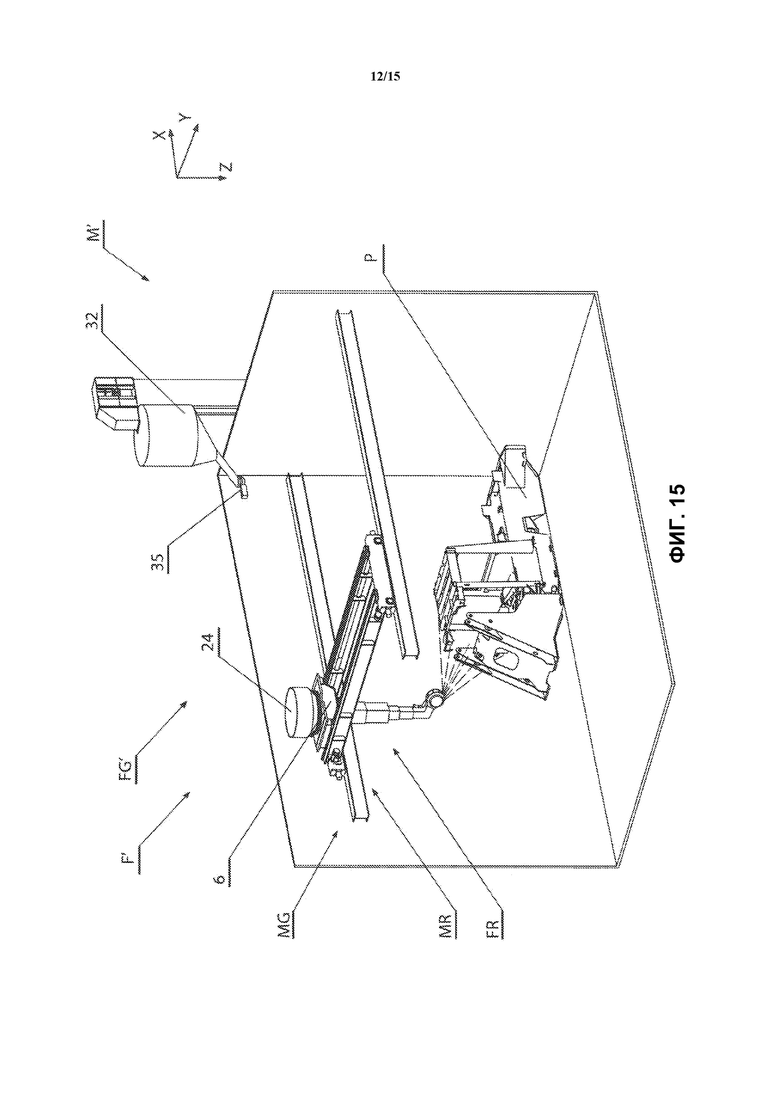
на фиг.15 и 16 представлена питающая система с общим блоком в варианте циклического питания;
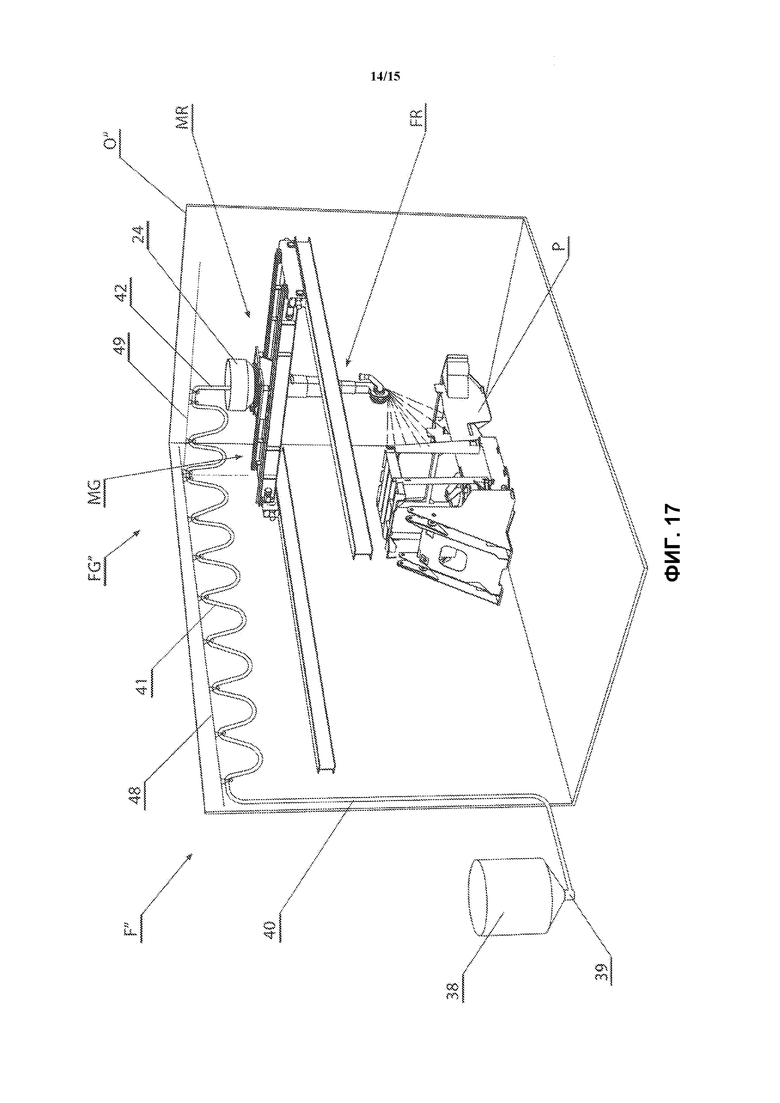
на фиг.17 представлена питающая система с общим блоком в варианте пневматического питания; и
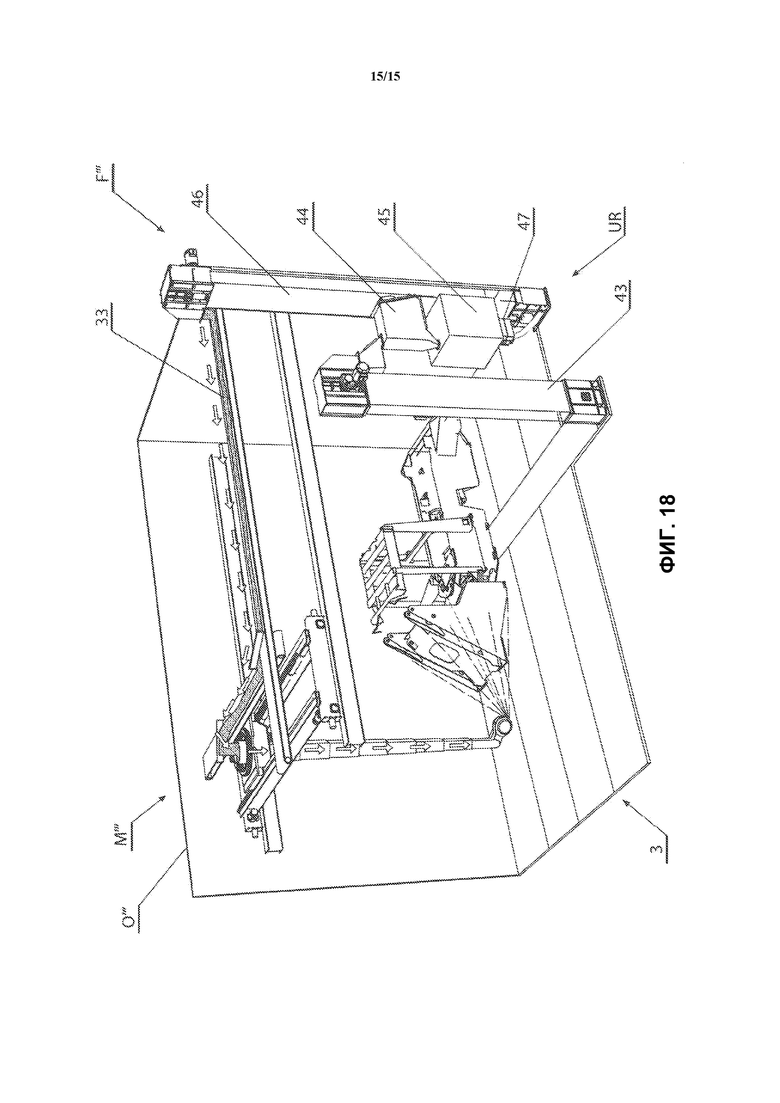
на фиг.18 представлена система для питания активной турбины абразивным материалом в варианте с общим ленточным блоком и главным резервуаром абразивного материала в нижнем положении.
На фиг.1 представлена машина Μ в своем основном варианте. Машина Μ содержит корпус О, который ограничивает пространство, представляющее собой рабочую камеру, и в котором происходит обработка поверхностей обрабатываемой детали с применением абразивного материала, и при этом для ясности машина представлена без боковой стенки. Как правило, передняя или задняя стенка содержит входные ворота 1, через который обрабатываемые детали поступают в рабочую камеру. Кроме того, машина содержит типичную фильтрационную систему вентиляции (не представленную на фигуре), которая обеспечивает удаление пыли из рабочего пространства. Машина может содержать любые известные фильтрационные и вентиляционные блоки, выполнены с возможностью удаления пыли, которая образуется в течение абразивной струйной обработки. Рабочая камера содержит источники света 2. Машина содержит систему UR рециркуляции абразивного материала. Рециркуляционная система UR содержит скребковую напольную систему 3 для транспортировки абразивного материала, которая известна, например, из патентной заявки Р402365, однако в машине может быть использована любая известная скребковая напольная система для транспортировки абразивного материала. Система рециркуляции абразивного материала также выполняет роль очистки абразивного материала посредством классификации с удалением крупных фракций (инородных тел), которые образуются в течение процесса обработки, и мелких фракций (пылевых частиц), которые образуются в течение процесса обработки, включая износ абразивного материала.
На фиг.1 представлена примерная обрабатываемая деталь Р, подлежащая обработке. Представленная обрабатываемая деталь Ρ представляет собой крупноразмерную обрабатываемую деталь, у которой каждый из трех геометрических размеров составляет более чем 1000 мм, причем машина может быть использована для обрабатываемых деталей любого размера. Обрабатываемая деталь Ρ расположена таким образом, что кинематический механизм позволяет средству для обработки достигать поверхностей, подлежащих обработке, а также кинематический механизм выполнен с возможностью осуществления обработки специфических обрабатываемых деталей.
Согласно настоящему изобретению машина содержит исполнительный механизм в форме активной турбины Т, которая производит средство для обработки в форме струи S абразивного материала. Активная турбина Τ движется посредством многокомпонентного кинематического механизма МK, в котором можно различить общий кинематический механизм MG и местный кинематический механизм MR. Общий кинематический механизм MG используется для осуществления общего движения, которое обеспечивает движение местного кинематического механизма MR, в то время как местный кинематический механизм MR определяет положение и ориентацию активной турбины Τ в пространстве. Кинематические части общего кинематического механизма MG и кинематические части местного кинематического механизма MR в совокупности образуют многокомпонентный кинематический механизм МK. Такой многокомпонентный кинематический механизм МK имеет опорную конструкцию K, которая также может представлять собой встроенную конструкцию (кожух и ворота) рабочей камеры, в которой осуществляется абразивная струйная обработка (фиг.1). Общий кинематический механизм MG содержит движущуюся балку 4, установленную с возможностью движения вдоль направляющей 5 для осуществления движения в направлении X, и движущуюся тележку 6, установленную с возможностью движения на движущейся балке 4 для осуществления движения в направлении Y. Согласно представленному варианту осуществления общий кинематический механизм MG приводит в движение местный кинематический механизм MR в декартовой плоскости, т.е. по двум осям X и Υ (эта плоскость является практически параллельной по отношению к поверхности земли). Общий кинематический механизм MG обеспечивает две степени свободы для установленного на нем местного кинематического механизма MR. Согласно представленному варианту осуществления направляющая 5, движущаяся балка 4 и движущаяся тележка 6 присутствуют в форме портального крана, но приводные блоки не представлены на фигуре. Местный кинематический механизм MR позволяет изменять высоту и ориентацию активной турбины Т. Согласно представленному варианту осуществления местный кинематический механизм MR установлен на движущейся тележке 6. Местный кинематический механизм MR содержит телескопический блок 7 (фиг.2) и вращающийся блок 8, на котором установлен телескопический блок 7. Вращающийся блок 8 служит для вращения телескопического блока 7, причем передача 9, приводимая в действие двигателем 10, используется для осуществления вращательного движения. Активная турбина Τ присоединена к части 11 телескопического блока 7. Установленный с возможностью вращения телескопический блок 7 позволяет активной турбине Τ двигаться по оси Ζ. Согласно представленному варианту осуществления активная турбина Τ может поворачиваться на угол γ в диапазоне от 180° до - 180°, т.е. на полный угол. Установленный с возможностью вращения телескопический блок 7 приводит активную турбину Τ в движение, представляющее собой движение, подводящее активную турбину Τ к поверхностям обрабатываемой детали Р, подлежащей обработке, и, таким образом, местный кинематический механизм MR предоставляет активной турбине Τ две степени свободы. Благодаря многокомпонентному кинематическому механизму МK, содержащему общий кинематический механизм MG и местный кинематический механизм MR, активная турбина Τ может двигаться в трехмерной системе координат Χ, Υ, Ζ и вращаться вокруг вертикальной оси, и, таким образом, в совокупности многокомпонентный кинематический механизм МK предоставляет активной турбине Τ четыре степени свободы, т.е. многокомпонентный кинематический механизм МK представляет собой четырехосный механизм.
Активная турбина Τ может быть оборудована регулируемым механизмом для изменения угла направления средства для обработки по отношению к фиксированному положению активной турбины Т, благодаря чему средство для обработки приобретает дополнительную степень свободы. Кроме того, исполнительный механизм может содержать регулируемый механизм для изменения интенсивности и формы средства для обработки.
Струя S абразивного материала, которую производит активная турбина Т, представлена на фиг.3 как угловой диапазон векторов зерен абразивного материала, выпускаемого активной турбиной 12 и имеющего достаточную энергию для воздействия на обрабатываемые поверхности. В следующей части описания сделано допущение, что направление описанного средства для обработки по оси p совпадает с суммарным вектором скорости зерен в струе абразивного материала, которую выпускает турбина в конкретном рабочем положении. Ось p представляет вектор скорости V для зерен абразивного материала, выходящего из активной турбины 12 активной турбины Т. Активная турбина Τ допускает изменение направления подачи струи S абразивного материала, т.е. изменение угла направления средства для обработки S без изменения положения самой турбины. В активной турбине Τ струя S абразивного материала производится в результате вращения активной турбины 12 с лопастями 13 (фиг.4), которые вращаются вокруг оси t. Изменение направления струи абразивного материала 5, которое описано осью р, осуществляется посредством механизма KS для изменения направления струи S. Механизм KS для изменения направления струи S содержит установленную с возможностью вращения регулировочную втулку 14, имеющую выпускное отверстие 15, через которое выходит абразивный материал (фиг.4 и 5). Положение регулировочной втулки 14 изменяется посредством передачи 16, содержащей червячное колесо 17, с которым взаимодействует червяк 18, приводимый в действие посредством двигателя 19 (фиг.3). Активная турбина Τ и механизм KS для изменения направления и струи S представлены в сечении А-А на фиг.5. Механизм KS для изменения направления струи S может быть оборудован любым другим приводным блоком. Струя S абразивного материала может быть направлена вверх (при вращении по часовой стрелке на фиг.3) или вниз (при вращении по часовой стрелке) посредством вращения регулировочной втулки 14 вокруг оси t с помощью передачи 16. На фиг.3 представлены толстыми линиями струя S абразивного материала для регулировочной втулке 14 в промежуточном положении и тонкими линиями два положения струя S' и S'' абразивного материала после вращения регулировочной втулки 14 в двух предельных положениях. Ось р' представляет собой максимальное увеличение угла β струи S' абразивного материала приблизительно на 50° по отношению к промежуточному положению струи S абразивного материала, описанного осью р. Ось р'' представляет собой максимальное снижение струи S'' абразивного материала на угол β, составляющий приблизительно 50° по отношению к промежуточному положению струи S абразивного материала. Механизм KS для изменения направления струи S вызывает изменение направления вектора скорости струи S абразивного материала, т.е. он предоставляет этой струе S степень свободы, представляющее собой вращение вокруг оси t. Механизм KS для изменения углового положения регулировочной втулки 14 предоставляет струе абразивного материала степень свободы без необходимости изменения положения турбины. Струя S абразивного материала имеет пять степеней свободы, которые предоставляют многокомпонентный кинематический механизм МK и механизм KS для изменения направления. Использование механизма KS для изменения направления струи S абразивного материала позволяет изменять угол вектора скорости V средства для обработки по отношению к оси вращения t, вокруг которой вращается диск, без применения местного кинематического механизма. Широкий диапазон изменения интенсивности средства для обработки получается посредством изменения скорости вращения активной турбины 12. Посредством изменения ориентации средства для обработки оказывается возможным регулирование турбины таким образом, чтобы предотвратить столкновение между турбиной и телескопическим блоком с обрабатываемой деталью.
Активная турбина Τ вращается вокруг оси t посредством передачи. Согласно представленному варианту осуществления на фиг.6 активную турбину Τ приводит в действие двигатель 20 посредством ременной передачи 21 (приведение в действие двигателем ременной передачи 21 не представлено). Согласно представленному варианту осуществления на фиг.7 активную турбину Τ приводит в действие двигатель 22, расположенный на оси t
Многокомпонентный кинематический механизм МK машины для абразивной струйной обработки, содержащий общий кинематический механизм MG и местный кинематический механизм MR, может быть дополнительно оборудован локальным кинематическим механизмом ML, установленным на местный кинематический механизм MR. Согласно представленному варианту осуществления на фиг.8 локальный кинематический механизм ML присутствует в форме механизма для отклонения активной турбины Τ и содержит вращающуюся консоль 23, установленную на практически горизонтальной оси m в нижней части 11 телескопического блока 7, причем для простоты привод вращательного механизма не представлен. Приводной механизм может быть скрыт внутри консоли 23. Активная турбина Τ установлена на конце консоли 23, причем традиционно ось консоли 23, обозначенная буквой r, проходит через ось t вращения активной турбины Τ и через ось m вращения вращающейся консоль. Посредством вращения консоль 23 может быть направлена вертикально вниз, и это положение описывает ось r'. Консоль может поворачиваться от оси r' до оси r'' на угол, составляющий приблизительно 90°. Локальный кинематический механизм ML позволяет активной турбине Τ перемещаться от оси телескопического устройства, принадлежащего местному кинематическому механизму MR. Локальный кинематический механизм вызывает изменение углового положения консоли 23 по отношению к горизонтальной плоскости. Локальный кинематический механизм ML предоставляет активной турбине Τ дополнительную степень свободы, представляющую собой вращение вокруг оси m. Таким образом, активная турбина Τ имеет пять степеней свободы, которые предоставляют многокомпонентный кинематический механизм МK и локальный кинематический механизм ML. Посредством применения механизма KS для изменения направления струи S средство для обработки имеет шесть степеней свободы.
На фиг.9 и 10 представлен локальный механизм RS для регулирования углового движения активной турбины Τ вокруг оси r, которая представляет собой продольную ось консоли 23, на которой установлена активная турбина Т. Любой известный механизм, срытый в консоли 23, может быть использован для осуществления этого движения. Торсионный механизм RS движения активной турбины Τ обеспечивает вращение активной турбины Τ на угол ϕ в диапазоне от 0° до 90° и, таким образом, вращение струи S абразивного материала вокруг оси r. Таким образом, Торсионный механизм RS движения активной турбины Τ предоставляет средству для обработки S дополнительную степень свободы.
Таким образом, активная турбина Τ может направлять струю абразивного материала на обрабатываемую деталь сбоку, а также снизу и сверху. Активная турбина Τ может осуществлять более сложные локальные движения, например, внутри обрабатываемых деталей.
Питающая система F для питания активной турбины Τ абразивным материалом содержит общий питающий блок FG, далее в настоящем документе называемый общим блоком FG, и местный питающий блок FR, далее в настоящем документе называемый местным блоком FR. Общий блок FG соединен с общим кинематическим механизмом MG и подает абразивный материал в местный блок FR, соединенный с местным кинематическим механизмом MR. Варианты осуществления питающей системы F будут обсуждаться далее в описании.
Местный блок FR, который питает активную турбину, содержит промежуточный резервуар 24, расположенный на телескопическом блоке 7 (фиг.11). Промежуточный резервуар 24 присоединен к верхней части телескопического блока 7 и вращается вместе с ним. Промежуточный резервуар 24 открыт сверху и выполнен с возможностью наполнения сверху посредством общего блока FG. Промежуточный резервуар 24 может принимать любую форму. Согласно представленному варианту осуществления промежуточный резервуар 24 является цилиндрическим. Согласно представленному варианту осуществления на фиг.12 местный блок FR содержит самотечный питающий шланг PG, который подает абразивный материал в активную турбину Т. Самотечный питающий шланг PG содержит верхнюю секцию 50 и нижнюю секцию 51. Верхняя секция 50 содержит верхний наклонный канал 25, непосредственно присоединенный к промежуточному резервуару 24, и верхний вертикальный канал 26, присоединенный к верхнему наклонному каналу 25, причем верхний вертикальный канал 26 содержит выпуск 27. Нижняя секция 51 содержит нижний вертикальный канал 28, имеющий впуск 29, и нижний наклонный канал 30, присоединенный к нижнему вертикальному каналу 28, причем нижний наклонный канал 30 расположен у активной турбины Τ и подает абразивный материал в активную турбину Т. Между выпуском 27 из верхней секции 50 и впуском 29 в нижнюю секцию 51 присутствует открытая секция 52 переменной длины. Самотечный питающий шланг PG может быть оборудован регулировочным клапаном 31 для абразивного материала, который расположен выше выпуска 27 из вертикального канала 26. Клапан для абразивного материала также может быть расположен непосредственно у резервуара 24. Резервуар 24 и самотечный питающий шланг PG вращаются вместе с телескопическим блоком 7, причем в выдвинутом положении телескопического блока 7 нижний вертикальный канал 28 вместе с наклонным нижним каналом 30 удаляются от верхнего вертикального канала 26. Нижний наклонный канал 30 может быть присоединен к нижнему элементу 11 телескопического блока 7. Верхний вертикальный канал 26 и верхний наклонный канал 25 могут быть установлены на движущейся тележке 6. Выпуск 27 верхнего вертикального канала 26 и впуск 29 нижнего вертикального канала 28 расположены коаксиально друг с другом. Выпуск 27 может быть изготовлен в форме (сужающегося) конуса, в то время как впуск 29 может быть изготовлен в форме (расширяющегося) конуса. Верхний вертикальный канал 26 и нижний вертикальный канал 28, а также, таким образом, выпуск 27 и впуск 29 изменяют расстояние друг от друга в зависимости от положения телескопического блока, т.е. от степени выдвижения подвижных элементов телескопического блока 7. На фиг.2 активная турбина Τ находится в наиболее высоком положении, а выпуск 27 и впуск 29 приближены друг к другу на минимальное расстояние. На фиг.1 и 11 выпуск 27 и впуск 29 удалены друг от друга на максимальное возможное расстояние. В течение работы машины абразивный материал выходит из верхнего вертикального канала 26 через выпуск 27 и опускается в воздухе под действием силы тяжести через открытую секцию 52 без какого-либо направляющего устройства и, наконец, попадает во впуск 29 нижнего вертикального канала 28. Абразивный материал, который поступает в нижний вертикальный канал 28, далее попадает в нижний наклонный канал 30, а затем в активную турбину Т. Наклонный нижний канал 30 наклонен на угол Q, составляющий по меньшей мере 30°, предпочтительно на угол, составляющий 35° по отношению к вертикальному каналу 28, что позволяет вводить абразивный материал непосредственно в активную турбину Т.
Общий питающий блок FG активной турбины подает абразивный материал в промежуточный резервуар 24, который представляет собой компенсационный буфер для движения общего кинематического механизма MG. Согласно варианту осуществления машины М, который представлен на фиг.13 и 14, питающая система F для питания активной турбины Τ абразивным материалом содержит общий блок FG и местный блок FR, как обсуждается выше. Общий блок FG содержит главный резервуар 32, продольный ленточный конвейер 33, расположенный вдоль стенки корпуса О, и поперечный ленточный конвейер 34, расположенный вдоль движущейся балки 4, причем конвейеры 33 и 34 выполнены с возможностью подачи абразивного материала из главного резервуара 32 в промежуточный резервуар 24, расположенный на телескопическом блоке 7 в местном блоке FR для питания активной турбины. Абразивный материал поступает из главного резервуара 32 через бункер, на конце которого находится регулировочный клапан 35, на продольный ленточный конвейер 33. Движущаяся балка 4 содержит скребок 36, посредством которого абразивный материал перенаправляется от продольного ленточного конвейера 33 на поперечный ленточный конвейер 34. Движущаяся тележка 6 содержит скребок 37, посредством которого абразивный материал перенаправляется от поперечного ленточного конвейера 34 на промежуточный резервуар 24. Подача абразивного материала на промежуточный резервуар 24 происходит таким образом, чтобы обеспечивать бесперебойную работу турбины с учетом моментальных изменений потребности в абразивном материале. Абразивный материал перемещается вдоль продольного ленточного конвейера 33 по направляющей Тх, а затем вдоль поперечного ленточного конвейера 34 по направляющей Ту. Примерное расположение местного кинематического механизма MR представлено на фиг.13. На фиг.14 представлено другое расположение местного кинематического механизма MR, причем абразивный материал перемещается вдоль менее длинной направляющей Тх и вдоль удлиненной направляющей Ту; кроме того, самотечный питающий шланг PG является укороченным. Движение абразивного материала вдоль направляющих Тх и Ту синхронизировано с интенсивностью приема местным блоком FR, а также зависит от расположения и направления движения общего кинематического механизма MG.
Согласно варианту осуществления машины М', который представлен на фиг.15 и 16, питающая система F' для питания активной турбины Τ абразивным материалом содержит общий блок FG и местный блок FR, как обсуждается выше. Общий блок FG содержит главный резервуар 32. Пополнение промежуточного резервуара 24 в местном блоке FR из главного резервуара 32 происходит в циклическом режиме. На фиг.15 представлены общий кинематический механизм MG и общий блок FG для питания активной турбины в примерном рабочем положении, т.е. в течение обработки обрабатываемой детали Р. Местный блок FR и активная турбина Τ работают автономно, причем продолжительность цикла эксплуатации активной турбины Τ зависит от требуемой скорости подачи абразивного материала в течение обработки, а также от емкости промежуточного резервуара 24. После того, как расходуется количество абразивного материала, накопленного в промежуточном резервуаре 24, обработка приостанавливается для наполнения промежуточного резервуара 24. На фиг.16 представлен общий кинематический механизм MG в положении наполнения, в котором абразивный материал поступает из главного резервуара 32 через бункер, на конце которого находится регулировочный клапан 35, в промежуточный резервуар 24.
Согласно варианту осуществления машины М'', который представлен на фиг.17, питающая система F'' для питания активной турбины Τ абразивным материалом содержит общий блок FG'' и местный блок FR, как обсуждается выше. Общий блок FG'' содержит главный резервуар 38 и гибкий пневматический шланг 41. Выпуск 39 главного резервуара 38 присоединен посредством шланга 40 к гибкому пневматическому шлангу 41, а выпуск 42 гибкого пневматического шланга 41 направлен непосредственно в промежуточный резервуар 24 в местном блоке FR. Пополнение промежуточного резервуара 24 осуществляется в непрерывном режиме. Гибкий пневматический шланг 41 выполнен с возможностью эффективной подачи абразивного материала во всем диапазоне движения, осуществляемого общим кинематическим механизмом MG. Гибкий пневматический шланг 41 подвешен на рельсах 48, 49 таким образом, что он представляет собой зигзагообразную линию, причем гибкий пневматический шланг 41 проходит вдоль стенки корпуса О'' и вдоль движущейся балки 4.
Согласно представленному варианту осуществления на фиг.18 машина М''' содержит питающую систему F''', в которой присутствует система UR рециркуляции абразивного материала, которая содержит скребковую напольную систему 3 для транспортировки абразивного материала, самотечный подъемник 43, сепаратор 44 абразивного материала и главный резервуар 45. В сепараторе 44 абразивный материал подвергается очистке и классификации для отделения примесей и фракции абразивного материала, непригодного для применения по форме или размеру. Инородные тела, которые образуются в течение обработки, могут быть отделены на решетчатых платформах или на ситовой системе, очищены в ручном или автоматическом режиме посредством вибрационного или ротационного сита. Согласно представленному варианту осуществления вспомогательный подъемник 46 используется для присоединения главного резервуара 45, который подает абразивный материал через регулировочный клапан 47, к продольному ленточному конвейеру 33, таким образом, что оказывается возможным расположение сепаратора 44 и главного резервуара 45 с клапаном на нижнем уровне и опускание машины. Используемая питающая система F'' выполнена с возможностью непрерывного питания абразивным материалом.
Машина Μ может содержать один или несколько параллельных транспортировочных коридоров для абразивного материала, как описано в патенте Р402365, а также поперечных транспортировочных коридоров для абразивного материала. Транспортировочный коридор для абразивного материала предпочтительно расположенный на полу. Горизонтальная напольная транспортировка абразивного материала предпочтительно осуществляется посредством скребковой системы, работающей в режиме возвратно-поступательного движения.
В рамках осуществления настоящего изобретения оказывается также возможным применение других систем рециркуляции абразивного материала.
Для регулирования движение активной турбины оказывается необходимым регулирование индивидуальных частей многокомпонентного кинематического механизма. Для этой цели может быть использован имеющийся в продаже программируемый контроллер, который выполняет задачи простой и обратной кинематики с применением исполнительных приводов частей механизма. Контроллер обеспечивает осуществление своих собственных кинематических цепочек с применением указанных модулей для регулирования центральных точек инструментов (TCP), представляющих собой турбины, а также для вычисления положения каждой оси системы. Специалисту в данной области техники известны имеющиеся в продаже системы управления и наблюдения для системы устройств согласно настоящему изобретению, которые выполнены с возможностью приспособления, например, такие как система SEW-EURODRIVES в форме платформы управления движением MultiMotion с дополнительным кинематическим технологическим модулем.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТАНОВКА ДЛЯ АЭРОГИДРОДИНАМИЧЕСКОЙ АБРАЗИВНОЙ ОЧИСТКИ ПОВЕРХНОСТЕЙ, ФОРСУНКА ДЛЯ НЕЕ (ВАРИАНТЫ), СПОСОБ АЭРОГИДРОДИНАМИЧЕСКОЙ АБРАЗИВНОЙ ОЧИСТКИ ПОВЕРХНОСТЕЙ И СОСТАВ ДЛЯ НЕЕ | 2010 |
|
RU2450906C2 |
| УСТАНОВКА ПЕСКОСТРУЙНАЯ УНИВЕРСАЛЬНАЯ | 2013 |
|
RU2525955C1 |
| Способ зачистки осевых каналов роторов турбин и устройство для его осуществления | 1990 |
|
SU1784448A1 |
| УСТАНОВКА ДЛЯ ХИМИЧЕСКОЙ ОБРАБОТКИ ДЕТАЛЕЙ НА ПОДВЕСКАХ | 1991 |
|
RU2013473C1 |
| УСТАНОВКА ДЛЯ СТРУЙНО-АБРАЗИВНОЙ ОБРАБОТКИ ДЕТАЛЕЙ | 2012 |
|
RU2503534C1 |
| СПОСОБ СВЕТОИНДУЦИРОВАННОЙ ОБРАБОТКИ МАТЕРИАЛОВ, ПРЕИМУЩЕСТВЕННО БИОТКАНЕЙ, И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1998 |
|
RU2175873C2 |
| Способ струйного электролитно-плазменного полирования металлических изделий сложного профиля и устройство для его реализации | 2016 |
|
RU2640213C1 |
| Увлажнитель | 1978 |
|
SU768402A1 |
| Морская система энергообеспечения средств наблюдения | 2022 |
|
RU2778597C1 |
| АЭРОАБРАЗИВНЫЙ СМЕСИТЕЛЬ УСТРОЙСТВА ДЛЯ АБРАЗИВНО-СТРУЙНОЙ ОБРАБОТКИ ПОВЕРХНОСТИ | 2002 |
|
RU2222421C1 |



Изобретение относится к машине для абразивной струйной обработки поверхностей обрабатываемой детали. Машина содержит питающую систему для подачи абразивного материала и корпус, в котором находятся рабочая камера, фильтрационная система рабочей камеры, многокомпонентный кинематический механизм для движения исполнительного механизма, система рециркуляции абразивного материала, система, подающая рециркулированный абразивный материал в исполнительный механизм, и система управления. Исполнительный механизм выполнен в виде активной турбины. Многокомпонентный кинематический механизм содержит общий кинематический механизм и местный кинематический механизм. Местный кинематический механизм содержит телескопический блок для движения активной турбины в вертикальном направлении и вращающийся механизм для вращения телескопического блока вокруг вертикальной оси. Питающая система для подачи абразивного материала содержит общий блок и местный блок, содержащий самотечный питающий шланг, расположенный вдоль телескопического блока. Самотечный питающий шланг содержит верхнюю секцию, нижнюю секцию и открытую секцию переменной длины в зависимости от выдвижения телескопического блока. В результате обеспечивается эффективный, безопасный, энергосберегающий и автоматизированный процесс абразивной обработки крупноразмерных обрабатываемых деталей. 13 з.п. ф-лы, 18 ил.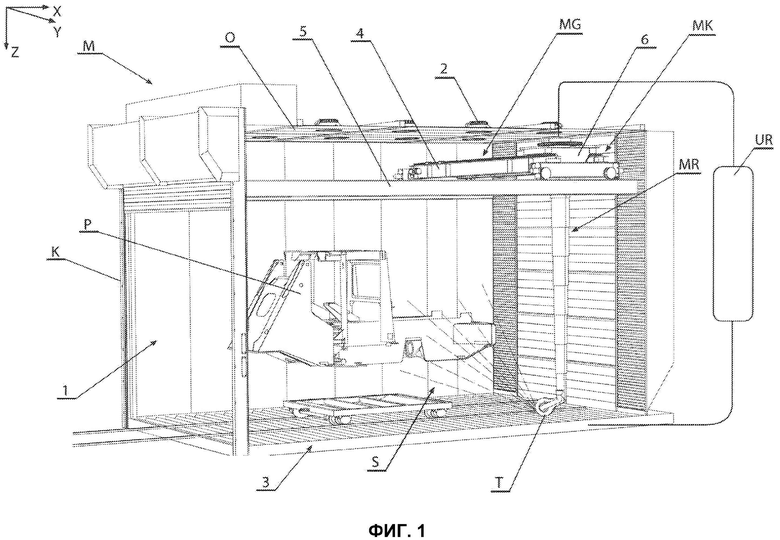
1. Машина для абразивной струйной обработки поверхностей обрабатываемой детали, каждый из трех геометрических размеров которой составляет по меньшей мере 1000 мм, содержащая питающую систему (F) для подачи абразивного материала и корпус, в котором находятся рабочая камера, фильтрационная система рабочей камеры, кинематический механизм для движения исполнительного механизма, система рециркуляции абразивного материала, система, подающая рециркулированный абразивный материал в исполнительный механизм, и система управления, при этом кинематический механизм является регулируемым, многокомпонентным и содержит по меньшей мере четыре оси, а исполнительный механизм выполнен в виде активной турбины, которая выполнена с возможностью производства средства для абразивной струйной обработки и направления его на обрабатываемую деталь, причем многокомпонентный кинематический механизм (МK) содержит общий кинематический механизм (MG) в двухосной прямоугольной системе координат в горизонтальной плоскости и присоединенный к общему кинематическому механизму (MG) местный кинематический механизм (MR), осуществляющий местное движение активной турбины (Т), установленной на местный кинематический механизм (MR), причем многокомпонентный кинематический механизм (МK) предоставляет активной турбине (Т) по меньшей мере четыре степени свободы, при этом местный кинематический механизм (MR) содержит телескопический блок (7) для движения активной турбины (Т) в вертикальном направлении и вращающийся механизм (8) для вращения телескопического блока (7) вокруг вертикальной оси (k), причем местный кинематический механизм (MR) предоставляет активной турбине две степени свободы, причем питающая система (F) для подачи абразивного материала содержит общий блок (FG, FG', FG'') и местный блок (FIR, FR), содержащий самотечный питающий шланг (PG), расположенный вдоль телескопического блока (7), при этом самотечный питающий шланг (PG) содержит верхнюю секцию (50), нижнюю секцию (51) и открытую секцию (52) переменной длины в зависимости от выдвижения телескопического блока (7).
2. Машина по п. 1, отличающаяся тем, что общий кинематический механизм (MG) содержит направляющую (5), установленную на корпус (О), движущуюся балку (4), выполненную с возможностью движения вдоль направляющей (5), и движущуюся тележку (6), выполненную с возможностью движения вдоль движущейся балки (4), причем движущаяся тележка (6) содержит местный кинематический механизм (MR), и общий кинематический механизм (MG) предоставляет местному кинематическому механизму (MR) две степени свободы.
3. Машина по любому из пп. 1 или 2, отличающаяся тем, что активная турбина (Т) содержит механизм (KS) для углового изменения абразивной струи (S), содержащий регулировочную втулку (14), содержащую выпускное отверстие (15) и приводной блок для изменения углового положения регулировочной втулки (14) для направления абразивного средства для обработки, и при этом абразивное средство для обработки получает дополнительную степень свободы по отношению к активной турбине (Т).
4. Машина по любому из пп. 1-3, отличающаяся тем, что многокомпонентный кинематический механизм (МK) содержит локальный механизм (ML) в виде механизма для отклонения активной турбины (Т), содержащий вращающуюся консоль (23), установленную на горизонтальной оси (m) для изменения расстояния от активной турбины (Т) до вертикальной оси (k), вокруг которой вращается телескопический блок (7), таким образом, что активная турбина (Т) и средство для обработки получают дополнительную степень свободы.
5. Машина по любому из пп. 1-3, отличающаяся тем, что многокомпонентный кинематический механизм (МK) содержит локальный механизм (ML), содержащий механизм (RS) для регулирования углового движения активной турбины (Т) вокруг оси (r) консоли (23), которая представляет собой продольную ось консоли (23), на которой установлена активная турбина (Т), при этом активная турбина (Т) и абразивное средство для обработки получают дополнительную степень свободы.
6. Машина по любому из пп. 1-5, отличающаяся тем, что в верхней секции (50) расположен верхний вертикальный канал (26) самотечного питающего шланга (PG), который присоединен к верхней секции телескопического блока (7), а в нижней секции (51) - нижний вертикальный канал (28) самотечного питающего шланга (PG), расположенный у активной турбины (Т), причем верхний вертикальный канал (26) и нижний вертикальный канал (28) являются съемными и расположены на переменном расстоянии друг от друга в зависимости от положения телескопического блока (7), и выпуск (27) из верхнего вертикального канала (26) и впуск (29) в нижний вертикальный канал (28) расположены коаксиально.
7. Машина по п. 6, отличающаяся тем, что верхняя секция (50) самотечного питающего шланга (PG) содержит регулировочный клапан (31) для абразивного материала.
8. Машина по любому из пп. 1-7, отличающаяся тем, что местный блок (FR) содержит промежуточный резервуар (24), выполненный с возможностью питания самотечного питающего шланга (PG).
9. Машина по п. 8, отличающаяся тем, что промежуточный резервуар (24) присоединен к телескопическому блоку (7) и вращается с телескопическим блоком (7).
10. Машина по п. 1, отличающаяся тем, что общий блок (FG) содержит главный резервуар (32), промежуточный резервуар (24), движущуюся тележку (6), продольный ленточный конвейер (33), принимающий абразивный материал из главного резервуара (32), расположенный вдоль направляющей (5), и поперечный ленточный конвейер (34), расположенный вдоль движущейся балки (4), причем движущаяся балка (4) содержит скребок (36) для абразивного материала, падающего с продольного ленточного конвейера (33) на поперечный ленточный конвейер (34), а движущаяся тележка (6) содержит скребок (37) для абразивного материала, падающего с поперечного ленточного конвейера (34) на промежуточный резервуар (24).
11. Машина по п. 1, отличающаяся тем, что общий блок (FG') содержит главный резервуар (32), промежуточный резервуар (24), выполненный с возможностью подачи абразивного материала в активную турбину (Т) с циклическими перерывами и для циклической подачи непосредственно из главного резервуара (32).
12. Машина по п. 1, отличающаяся тем, что общий блок (FG'') содержит главный резервуар (38), промежуточный резервуар (24) и гибкий пневматический шланг (41), присоединенный к главному резервуару (38), причем выпуск (42) гибкого пневматического шланга (41) относится к промежуточному резервуару (24).
13. Машина по п. 7, отличающаяся тем, что система рециркуляции абразивного материала (UR) содержит скребковую напольную систему (3) для транспортировки абразивного материала, обеспечиваемой движением скребков в транспортировочных коридорах.
14. Машина по п. 7, отличающаяся тем, что система рециркуляции абразивного материала (UR) содержит вспомогательный подъемник (46), соединяющий главный резервуар (45), подающий абразивный материал через регулировочный клапан (47), с продольным ленточным конвейером (33).
| JP 2006035347 A, 09.02.2006 | |||
| CN 107139086 A, 08.09.2017 | |||
| US 5779524 A, 14.07.1998 | |||
| УСТРОЙСТВО ДЛЯ НАРУЖНОЙ ПОВЕРХНОСТНОЙ ОБРАБОТКИ КОРПУСА СУДНА | 1992 |
|
RU2088471C1 |

