Изобретение относится к области систем управления артиллерийскими установками или бортовым вооружением, в частности к средствам прицеливания или наведения со средствами компенсации скорости, направления, температуры, давления или влажности атмосферы [F41G 5/00, F41G 3/08, F41G 3/22].
Из уровня техники известна АВТОМАТИЗИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ ВООРУЖЕНИЕМ [RU 2235270 C1, опубл. 27.08.2004]. Автоматизированная система управления вооружением, содержащая последовательно соединённые пульт управления, прицел, блок суммирования и привод наведения орудия-пусковой установки, баллистический вычислитель, выход которого подключён ко второму входу блока суммирования, блок ручных поправок, выходы которого по количеству поправок подключены к соответствующим первым входам баллистического вычислителя, датчик баллистики, лазерный дальномер и датчик ветра, выход каждого из которых подключён соответственно ко второму, третьему и четвёртому входам баллистического вычислителя, а также систему наведения управляемых ракет, включающую блок компенсации веса управляемой ракеты и последовательно соединённые координатор, вход которого соединён со вторым выходом прицела, устройство формирования сигнала управления, дополнительный блок суммирования, второй вход которого соединён с выходом блока компенсации веса управляемой ракеты, устройство формирования команды управления и линию передачи команд, сопряжённую с управляемой ракетой, отличающаяся тем, что дополнительно установлены первый ключ, первый и второй входы которого соединены со вторыми выходами соответственно пульта управления и датчика ветра, первый переключатель, вход которого подключён к выходу датчика баллистики, блок констант, выход которого подключён к первому входу первого переключателя, последовательно соединённые датчик скорости вертикального воздушного потока, вход которого соединён с выходом первого ключа, первый квадратор, второй переключатель, второй вход которого соединён с выходом датчика баллистики, масштабирующий блок, блок умножения, со вторым входом которого соединён выход первого переключателя, и согласующее устройство, второй вход которого подключён к выходу лазерного дальномера, а выход подключён к третьему входу блока суммирования, установлены также блок деления, первый и второй входы которого соединены со вторыми выходами соответственно лазерного дальномера и датчика баллистики, второй квадратор, вход которого соединён с выходом блока деления, а выход - с третьим входом первого переключателя, два дополнительных масштабирующих блока, реле времени, инвертор, второй ключ и блок программ с блоком их установки, при этом второй выход второго переключателя через первый дополнительный масштабирующий блок соединён с третьим входом блока умножения, третий - через последовательно соединённые второй дополнительный масштабирующий блок, инвертор и второй ключ соединён с третьим входом дополнительного блока суммирования, выход реле времени, первый и второй входы которого соединены соответственно с третьим выходом пульта управления и выходом датчика баллистики, соединён со входом блока программ, второй вход которого соединён с выходом блока установки программ, а выход соединён со вторым входом второго ключа.
Недостатком аналога является высокая вероятность обнаружения корабля носителя, кроме того, недостатком аналога является низкая точность определения цели.
Из уровня техники известна АВТОМАТИЗИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ ВООРУЖЕНИЕМ [RU 2210715 C1, опубл. 20.08.2003]. Автоматизированная система управления вооружением, содержащая последовательно соединённые пульт управления, прицел, блок суммирования и привод наведения орудия или пусковой установки, баллистический вычислитель, выход которого подключён ко второму входу блока суммирования, блок ручных поправок, выходы которого по количеству поправок подключены к соответствующим первым входам баллистического вычислителя, ко второму, третьему и четвёртому входам которого подключены соответственно датчик баллистики боеприпаса, лазерный дальномер и датчик ветра, а также систему наведения управляемых ракет, включающую блок компенсации веса управляемой ракеты и последовательно соединённые координатор, вход которого соединён со вторым выходом прицела, устройство формирования сигнала управления, дополнительный блок суммирования, второй вход которого соединён с выходом блока компенсации веса управляемой ракеты, устройство формирования команды управления и линию передачи команд, сопряжённую с управляемой ракетой, отличающаяся тем, что установлены первый переключатель, вход которого подключён к выходу датчика баллистики боеприпаса, блок констант, выход которого подключён к первому входу первого переключателя, последовательно соединённые датчик скорости вертикального воздушного потока, первый квадратор, второй переключатель, второй вход которого соединён с выходом датчика баллистики боеприпаса, масштабирующий блок, блок умножения, со вторым входом которого соединён выход первого переключателя, и согласующее устройство, выход которого подключён к третьему входу блока суммирования, а также установлены блок деления, первый и второй входы которого соединены с выходами соответственно лазерного дальномера и датчика баллистики боеприпаса, второй квадратор, вход которого соединён с выходом блока деления, а выход - с третьим входом первого переключателя, два дополнительных масштабирующих блока и инвертор, при этом второй выход второго переключателя через первый дополнительный масштабирующий блок соединён с третьим входом блока умножения, третий - через последовательно соединённые второй дополнительный масштабирующий блок и инвертор соединён с третьим входом дополнительного блока суммирования, а датчик скорости вертикального воздушного потока электрически соединён через ключ со вторыми выходами датчика ветра и пульта управления.
Недостатком аналога является высокая вероятность обнаружения корабля носителя, кроме того, недостатком аналога является низкая точность определения цели.
Наиболее близким по технической сущности является ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА УПРАВЛЕНИЯ [RU 2172010 C1, опубл. 10.08.2001]. Оптико-электронная система управления, содержащая кинематически связанные между собой блок наведения и стабилизации и пеленгатор, отличающаяся тем, что в нее дополнительно введены корректирующее устройство и устройство компенсации погрешности оператора, выполненные с возможностью запоминания начальных условий, преобразователь координат из стабилизированной сферической в исполнительную систему координат блока наведения и стабилизации, видеоконтрольное устройство, а также последовательно соединённые датчик команд, коммутатор и преобразователь координат из измерительной системы координат пеленгатора в стабилизированную сферическую систему координат, при этом первый выход пеленгатора соединён с входом видеоконтрольного устройства, второй выход пеленгатора соединён с вторым входом коммутатора, выход преобразователя координат из измерительной системы координат пеленгатора в стабилизированную сферическую систему координат соединён с третьим входом коммутатора, вход устройства компенсации погрешности оператора соединён с вторым выходом коммутатора, вход корректирующего устройства соединён с третьим выходом коммутатора, преобразователь координат из стабилизированной сферической в исполнительную систему координат блока наведения и стабилизации входом соединён с четвёртым выходом и четвёртым входом коммутатора, а выходом - с входом блока наведения и стабилизации, выходы же устройства компенсации погрешности оператора и корректирующего устройства соединены соответственно с пятым и шестым входами коммутатора.
Основной технической проблемой прототипа является высокая вероятность обнаружения корабля носителя, кроме того, недостатком аналога является низкая точность определения цели.
Задачей изобретения является устранение недостатков прототипа.
Технический результат изобретения заключается в снижении вероятности обнаружения корабля - носителя оптико-электронной системы управления. Кроме того, технический результат изобретения заключается в повышении точности определения нахождения цели.
Технический результат изобретения достигается за счёт того, что оптико-электронная система управления корабельной артиллерийской установкой состоит из оптико-электронного блока и стойки управления, при этом оптико-электронный блок содержит блок камер и лазерный дальномер, размещённые на гиростабилизированной платформе, плату управления горизонтальным приводом, плату управления вертикальным приводом, вертикальный гироскопический датчик, горизонтальный гироскопический датчик, а стойка управления содержит пульт управления, пульт управления артиллерийской установкой, видеоконтрольное устройство, устройство документирования, баллистический вычислитель, плату цифровой обработки изображения, устройство сопряжения, модуль геопозиционирования, в которой первый выход блока камер соединён с первым входом видеоконтрольного устройства, второй выход блока камер соединён с первым входом платы цифровой обработки изображения, выход лазерного дальномера соединён со вторым входом платы цифровой обработки изображения, выход гиростабилизированной платформы соединён с третьим входом платы цифровой обработки изображения, выход вертикального гироскопического датчика соединён с первым входом платы управления вертикальным приводом, выход горизонтального гироскопического датчика соединён с первым входом платы управления горизонтальным приводом, выход платы управления вертикальным приводом соединён с первым входом гиростабилизированной платформы, выход платы управления горизонтальным приводом соединён со вторым входом гиростабилизированной платформы, первый выход пульта управления соединён с входом блока камер, выход модуля геопозиционирования соединён с четвёртым входом платы цифровой обработки изображения, первый выход платы цифровой обработки изображения соединён с входом устройства документирования, второй выход платы цифровой обработки изображения соединён с первым входом модуля связи с артиллерийской установкой, третий выход платы цифровой обработки изображения соединён с первым входом пульта управления артиллерийской установки, четвёртый выход платы цифровой обработки изображения соединён со вторым входом видеоконтрольного устройства, выход баллистического вычислителя соединён со вторым входом пульта управления артиллерийской установкой, первый выход пульта управления артиллерийской установкой соединён со вторым входом модуля связи с артиллерийской установкой, при этом баллистический вычислитель выполнен с возможностью получения сигнала требований таблиц стрельб, а гиростабилизированная платформа выполнена с возможностью получения сигнала от корабельной системы гиростабилизации.
В частности, блок камер, смонтированный на гиростабилизированную платформу, содержит широкопольный телевизионный канал, узкопольный телевизионный канал, тепловизионные каналы, лазерный дальномер, при этом блок камер оснащён защитными стёклами, расположенными под углом 105 градусов к линии визирования.
В частности, тепловизионные каналы выполнены в виде совокупности коротковолнового тепловизионного канала, работающего по технологии SWIR с длинной волны от 1,4 мкм до 3 мкм, и длинноволнового тепловизионного канала, работающего по технологии LWIR с длинной волны от 8 мкм до 14 мкм.
В частности, телевизионные каналы интегрированы в систему с переменным фокусным расстоянием, выполненные с возможностью формирования поле зрения от узкопольного до широкопольного за счёт механизма трансфокатора.
В частности, оптико-электронная система управления содержит блок питания, выполненный с возможностью преобразования переменного тока в постоянный ток 27 В мощностью 1 кВт.
В частности, модуль геопозиционирования выполнен в виде модуля определения координат ГЛОНАСС - GPS, выполненного с возможностью вычисления географических координат цели за счёт данных о собственных координатах, значениях азимута, угла места и дальности, а также, выполненного с возможностью передачи вычисленных координат.
В частности, оптико-электронная система управления содержит автомат сопровождения.
В частности, плата управления вертикальным приводом и плата управления горизонтальным приводом выполнены с возможностью получения сигнала ручного управления приводами гиростабилизированной платформы.
Краткое описание чертежей.
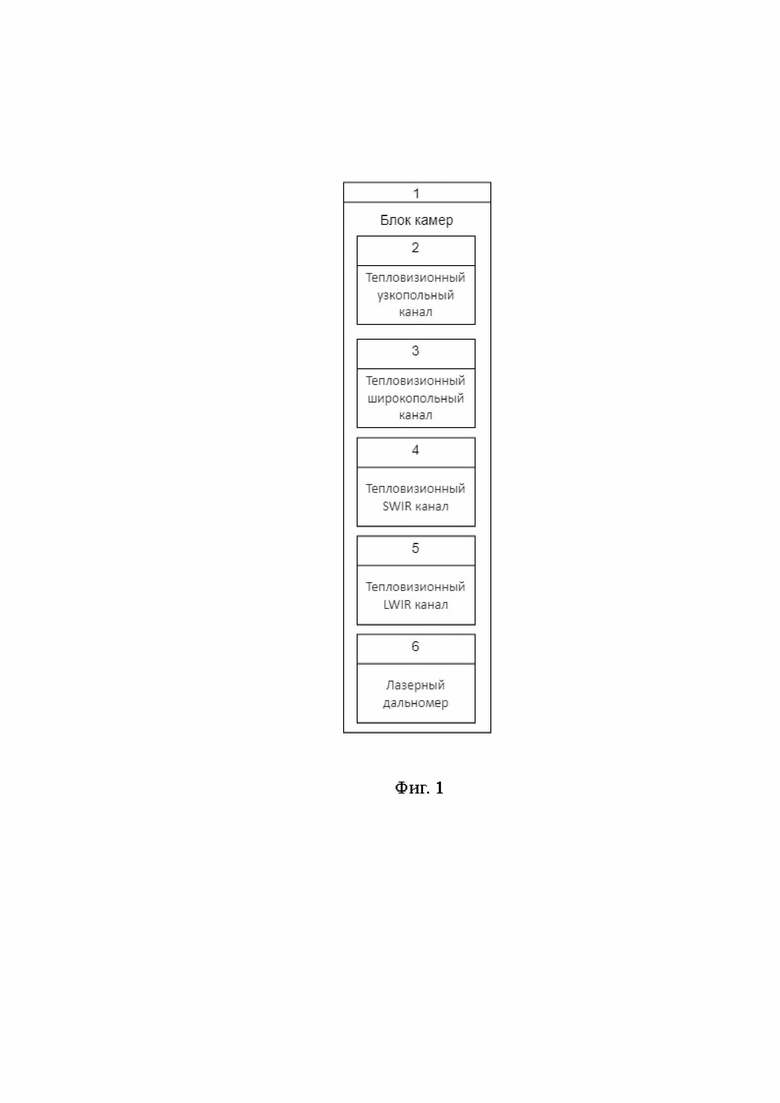
На фиг. 1 представлено схематическое содержание компонентов блока камер.
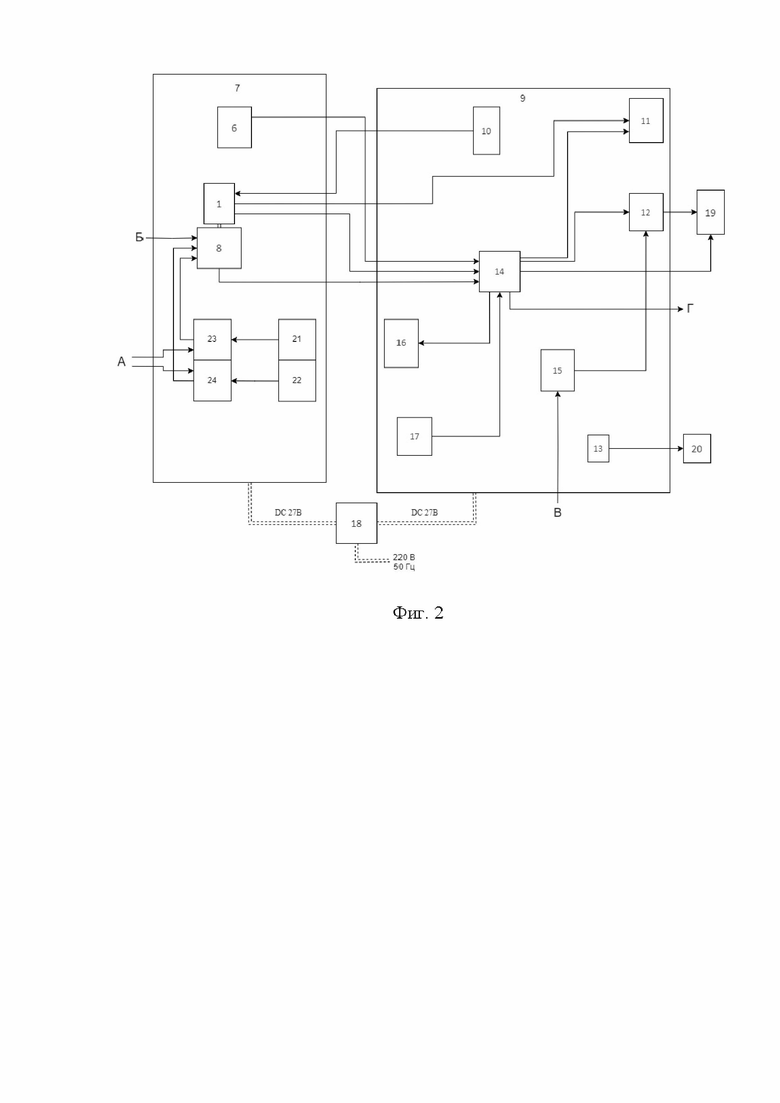
На фиг. 2 представлена структурная схема оптико-электронной системы управления с формируемыми сигналами и связями.
На фигурах обозначено: 1 - блок камер, 2 - телевизионный узкопольный канал, 3 - телевизионный широкопольнный канал, 4 - тепловизионный SWIR канал, 5 - тепловизионный LWIR канал, 6 - лазерный дальномер, 7 - оптико-электронный блок, 8 - гиростабилизированная платформа, 9 - стойка управления, 10 - пульт управления, 11 - видеоконтрольное устройство, 12 - пульт управления артиллерийской установкой, 13 - устройство сопряжения, 14 - плата цифровой обработки изображения, 15 - баллистический вычислитель, 16 - устройство документирования, 17 - модуль геопозицирования, 18 - блок питания, 19 - модуль связи с артиллерийской установкой, 20 - модуль связи с интегрированной мостиковой системой, 21 - вертикальный гироскопический датчик, 22 - горизонтальный гироскопический датчик, 23 - плата управления вертикальным приводом, 24 - плата управления горизонтальным приводом.
Также на фигурах буквами обозначено: А - сигнал ручного управления приводами гиростабилизированной платформы, Б - сигнал на привода гиростабилизированной платформы от корабельной системы гиростабилизации, В - сигнал требований таблиц стрельб, Г - географические координаты цели.
Настоящее изобретение реализуется посредством следующих технических средств.
Оптико-электронная система управления содержит блок камер 1, оптико-электронный блок 7 и стойку управления 9.
Блок камер 1 содержит: узкопольный телевизионный канал 2, широкопольнный телевизионный канал 3, тепловизионный SWIR канал 4, тепловизионный LWIR канал 5, лазерный дальномер 6.
Оптико-электронный блок 7 содержит: климат контроль, гиростабилизированную платформу 8, привод горизонтального наведения, привод вертикального наведения. Также оптико-электронный блок 7 содержит блок камер 1, смонтированный на гиростабилизированную платформу 8, а также содержит систему защитных стёкол, расположенных под углом к линии визирования, отличным от ортогонального.
Оптико-электронный блок 7 обладает следующими степенями свободы: 0-360° по горизонту и от минус 15° до плюс 85° по углу места. Оптико-электронный блок 7 выполнен с возможностью интеграции в корабельную систему гиростабилизации таким образом, что корабельная система гиростабилизации и собственные датчики оптико-электронного блока 7 выполнены с возможностью совместной работы.
Стойка управления 9 содержит: пульт управления 10, видеоконтрольное устройство 11, пульт управления артиллерийской установкой 12, устройство сопряжения 13, плату цифровой обработки изображения 14, баллистический вычислитель 15, устройство документирования 16 и модуль геопозицирования 17.
Блок питания 18 соединён со стойкой управления 9 и с оптико-электронным блоком 7, причём питание через оптико-электронный блок 7 подаётся также на блок камер 1.
Система сбора информации выполнена с возможностью сбора данных, например, таких как навигационный данные, метеорологические данные, данные о положении ствола, данные от внешних центров управления и другие данные. Система сбора информации соединена со стойкой управления 9 и с оптико-электронным блоком 7, а также выполнена с возможностью передачи данных на стойку управления 9 и оптико-электронный блок 7.
Стойка управления 9 выполнена с возможностью передачи управляющих сигналов при помощи модуля связи с интегрированной мостиковой системой 20 и модуля связи с артиллерийской установкой 19.
Оптико-электронная система управления предназначена для оснащения кораблей и судов средствами оптико-электронного обнаружения, классификации, определения координат целей и управления средствами поражения, в том числе, расположенными за пределами объекта установки этих средств.
Оптико-электронный блок 7, получив данные об углах наведения, а также данные с системы сбора информации, анализирует полученные данные на предмет определения азимута, угла места и определяет расстояния до цели. После анализа данных через оптико-электронный блок 7 передают в стойку управления 9 видеокадр, полученный от блока камер 1, а также азимут, угол места и дальность до цели.
После обработки информации стойкой управления 9 передают на модуль связи с артиллерийской установкой 19 полный угол вертикального наведения и полный угол горизонтального наведения, а также передают данные о выборе режима стрельбы артиллерийской установки.
После обработки информации стойкой управления 9 передают на модуль связи с интегрированной мостиковой системой 20 азимут, угол места и дальность до цели, при этом передают информацию и о воздушной и надводной обстановке.
Тепловизионный канал 4 выполнен по технологии SWIR (short wave infrared или коротковолновый инфракрасный диапазон), работающий в диапазоне от 1,4 микрометра до 3 микрометров.
Питание на систему подаётся при помощи блока питания 18, выполненного таким образом, что преобразует переменный ток с напряжением 230 В ± 10 % и частотой 50 ± 0,2 Гц в постоянный ток 27 В мощностью 1 кВт.
Блок камер 7 содержит набор защитных стёкол, расположенных под углом относительно узкопольного телевизионного канала 2, широкопольнного телевизионного канала 3, а также тепловизионного SWIR канала 4, тепловизионного LWIR канала 5 и лазерного дальномера 6.
Узкопольный телевизионный канал 2 и широкопольный телевизионный канал 3 интегрированы в систему с переменным фокусным расстоянием, выполненные с возможностью формирования поле зрения от узкопольного до широкопольного за счёт механизма трансфокатора.
При этом устройство не содержит устройства радиолокации, что в совокупности с расположением защитных стёкол снижает вероятность обнаружения оптико-электронной системы управления для радиолокационных и оптико-электронных средств практически до нуля, что в свою очередь снижает вероятность обнаружения корабля - носителя оптико-электронной системы управления.
Благодаря совокупности использования лазерного дальномера 6 и тепловизионного SWIR канала 4 и с учётом формирования управления на привода гиростабилизированной платформы с использованием ШИМ достигается точность определения координат целей ± 5 метров при дальности до цели 20 километров.
За счёт использования в составе оптико-электронной системы управления модуля ГЛОНАСС-GPS и специального вычислителя реализуется возможность определения координат цели не только в системе координат корабля-носителя, но и в рамках решения прямой геодезической задачи - в географических координатах, что позволяет с использованием всех доступных систем и средств связи передавать географические координаты цели устройствам поражения и подавления, расположенным на любом удалении от корабля-носителя оптико-электронной системы управления.
Структурная схема оптико-электронной системы управления формирует следующие сигналы и связи компонентов:
Для поддержания оптимальной температуры под кожухом оптико-электронного блока смонтирован датчик температуры, отправляющий сигналы на климат контроль, что позволяет поддерживать оптимальные рабочие температуры оптико-электронного блока.
Гиростабилизированная платформа 8 получает сигналы как от вертикального гироскопического датчика 21, так и от горизонтального гироскопического датчика 22, причём сообщение гиростабилизированной платформы 8 с гироскопическими датчиками происходит через платы управления (плата управления вертикальным приводом 23 получает сигнал от вертикального гироскопического датчика 21, а плата управления горизонтальным приводом 24 получает сигнал от горизонтального гироскопического датчика 22). Также возможен ручной вариант управления приводами гиростабилизированный платформы 8 при помощи системы ручного управления приводами. При этом гиростабилизированная платформа 8 сообщена с корабельной системой гиростабилизации.
Для выбора необходимого информативного канала используют пульт управления 10, отправляющий соответствующий сигнал управления на блок камер 1. При этом с блока камер 1 поступает сигнал на видеоконтрольное устройство 11, смонтированное в стойку управления 7. Также с блока камер 1 поступает сигнал на плату цифровой обработки изображения 14 и, после обработки, сигнал направляют на видеоконтрольное устройство 11.
Также на плату цифровой обработки изображения 14 приходит сигнал от гиростабилизированной платформы 8, лазерного дальномера 6 и с модуля геопозиционирования 17, при этом сигналы, приходящие в плату цифровой обработки изображения 14 направляют в устройство документирования 16, что позволяет фиксировать большое количество показателей, также плата цифровой обработки изображения 14 передаёт информацию на устройство передачи.
Пульт управления артиллерийской установкой 12 получает сигналы от баллистического вычислителя 15 (баллистический вычислитель 15 генерирует сигнал для пульта управления артиллерийской установкой 12 на основе данных, введённых на устройстве передачи требований таблицы стрельбы), а также сигналы от платы цифровой обработки изображения 14, после чего обработанный сигнал передают на модуль связи с артиллерийской установкой 19, при этом дублируя сигнал с платы цифровой обработки изображения 14.
Модуль связи с интегрированной мостиковой системой 20 соединён со стойкой управления 9 при помощи устройства сопряжения 13.
Описание работы настоящего изобретения:
Оптико-электронная система управления управляется оператором с использованием стойки управления в различных режимах ручного и автоматического наведения на цель с использованием телевизионных и тепловизионных каналов, наводя перекрестье видеомонитора на цель. Высокоточные датчики, расположенные на приводах наведения обеспечивают считывание углов (азимут и угол места) и передачу их совместно с дальностью, измеренной с использованием лазерной дальнометрии в стойку управления, для цифровой обработки, и автомат сопровождения, сформированный на основе платы цифровой обработки изображения. Управление лазерной дальнометрией осуществляется в режиме ручного включения с частотой 1-10 Гц. После устойчивого захвата цели по трём координатам (азимут, угол места и дальность) автомат передаёт сигналы рассогласования на привода оптико-электронного блока, что позволяет оптико-электронной системе управления сопровождать цель, вычислять полный угол вертикального наведения и полный угол горизонтального наведения и передавать эти углы на привода ствола артиллерийской установки.
Пример осуществления изобретения.
Настоящее изобретение было смонтировано на корабль проекта 22800 типа «Каракурт».
Блок камер в варианте реализации состоял из телевизионного канала, формирующего, как узкое, так и широкое поле зрение за счёт трансфокатора, позволяющего плавно выбирать, как поле зрения, так и фокусное расстояние панкратической оптики, тепловизионных каналов SWIR и LWIR диапазонов, лазерного дальномера, при этом:
1. Режим «узкопольного телевизионного канала» с узким углом обзора 1,45° × 1,08° служит для работы в режимах «захват» и «автосопровождение» и высокочувствительную матрицу изображения для получения чёткого и детализированного фото/видео. Режим ориентирования канала на цель реализован в рамках общего строения блока камер.
2. Режим «широкопольного телевизионного канала» с широким углом обзора 5,33° × 4° служит для работы в режимах «наведение», «поиск». Переход из режима «узкопольный» в «широкопольный» осуществляется оператором за счёт управления переменным фокусным расстоянием объектива с использованием трансфокатора. Телевизионный канал содержит высокочувствительную матрицу изображения для получения чёткого и детализированного фото/видео, механизм поворота и наклона камеры для точной настройки направления обзора.
3. Тепловизионные обзорные широкопольные каналы (углы поля зрения 6,2° × 4,7°) выполнены в виде устройств, позволяющих выделять объекты на различных фонах (море, небо, земля) с минимальным температурным контрастом. Тепловизионный канал блока камер выполнен в виде совокупности устройств работающих по технологии SWIR и LWIR, при этом длина волны устройства, работающего по технологии SWIR, составляет от 1,4 мкм до 3 мкм, а длина волны устройства, работающего по технологии LWIR, составляет от 8 мкм до 14 мкм, обеспечивая чувствительность (тепловой контраст) на уровне 40мК.
4. Лазерный дальномер выполнен в виде устройства выпускающего и принимающего лазерный луч с длиной волны 1,54 мкм. Взаимодействие SWIR канала и лазерного дальномера позволяют за счёт согласованности оптических диапазонов излучений и наблюдения пятна лазера на экране производить подъюстировку оптических осей телевизионных, тепловизионных и лазерного каналов в условиях эксплуатации, что крайне важно для аналогичных оптико-электронных систем.
Блок камер является частью оптико-электронного блока в котором:
Климат контроль выполнен в виде датчиков температуры и системы обогрева, содержащей нагревательные элементы с вентиляторами. Климат контроль позволят поддерживать работоспособность оптико-электронной системы в условиях высокоширотной эксплуатации (при температурах до минус 50°С).
Блок камер содержит защитные стёкла, расположенные под углом к линии визирования, а именно под углом 105°00´.
Оптико-электронный блок соединён также со стойкой управления, в которой: пульт управления и пульт управления артиллерийской установкой выполнены в виде системы, содержащей органы управления и мониторинга, при этом органы управления выполнены в виде кнопок, рычагов и переключателей. Видеоконтрольное устройство представляет собой компонент оптико-электронной системы управления, который предназначен для контроля и отображения видеоинформации. Оно обеспечивает возможность просмотра и анализа видеоизображения, полученного от камер, входящих в состав системы. Видеоконтрольное устройство может иметь различные функции, включая масштабирование, изменение контрастности и яркости, выбор и переключение источников видеосигналов, а также запись и документирование видеоданных. Это позволяет операторам системы наблюдения и управления получать визуальную информацию и принимать соответствующие решения на основе полученных данных.
Баллистический вычислитель представляет собой устройство с программным обеспечением, предназначенное для ввода параметров стрельбы в качестве поправок при выработке полных углов наведения - горизонтального и вертикального и передачу пропорциональных им сигналов управления на привода артиллерийской установки.
Ввиду отсутствия радиолокационных компонентов в конструкции оптико-электронной системы управления и наличия защитных стёкол, расположенных под углом к линии визирования, отличным от ортогонального снижается вероятность обнаружения корабля-носителя оптико-электронной системы управления.
Так, например в аналогах заявлены лазерные дальномеры, при этом в устройствах аналогах не содержится защитных стёкол, расположенных под углом к линии визирования.
Наличие защитных стёкол на прямую влияет на вероятность обнаружения корабля-носителя, а именно при отсутствии защитных стёкол корабль-носитель системы-аналога был обнаружен сторонним кораблём 48 раз из 50, обнаружение зафиксировано при попытке определения данных о нахождении цели (стороннего корабля). При смонтированных защитных стёклах, расположенных под углом 105°00´ к линии визирования наблюдается снижение вероятности обнаружения корабля-носителя оптико-электронной системы управления, а именно корабль-носитель оптико-электронной системы управления был обнаружен сторонним кораблём 2 раза из 50, обнаружение зафиксировано при попытке определения данных о нахождении цели (стороннего корабля), что в 24 раза меньше.
В решении-прототипе указано устройство - пеленгатор, работающий по принципу использования радиоволн для определения направления на источник радиоволн, в виду чего решение-прототип было обнаружено сторонним кораблём 50 раз из 50, так как подразумевает использование радиолокационных компонентов (пеленгатора).
Также совокупностью компонентов и устройств, предусмотренная в прототипах и аналогах, не предполагает определение географических координат цели, что исключает возможность передачи координат цели на средства поражения (подавления), расположенные вне корабля-носителя оптико-электронной системы.
Система защитных стёкол снижает вероятность обнаружения следующим образом:
При определении источников излучения, визуально или с помощью оптики, используется эффект отражения света от оптических поверхностей (линзы биноклей, стёкла оптических систем и иное, расположенное в пределах объектов наблюдения), которое становится наиболее заметным, если наблюдатель находится на оси наблюдения, расположенной строго на оси отражения света от наблюдаемой оптики или источника излучения. Наклонные стёкла оптико-электронного блока уводят оптическую ось отражённого сигнала от оси наблюдения на 15° и, тем самым, обеспечивают скрытность, как самой оптико-электронной системы управления, так и корабля-носителя (при этом не наблюдается значимого снижения мощности излучения лазера или снижение чувствительности инфракрасных каналов, снижающих заявленные характеристики системы по дальности обнаружения и точности наведения). С помощью излучения, например лазерного, в сторону цели для определения расстояния от корабля-носителя до цели происходит преломление лазерного луча под углом, определённым типом линзы стекла (например, плосковогнутая)и углом расположения данного стекла относительно линии визирования.
Повышение точности определения координат цели оптико-электронной системы управления достигается за счёт того, что тепловизионный канал SWIR диапазона с длинной волны от 1,4 мкм до 3 мкм построен из компонентов (матрица и объектив), работающих в одном диапазоне и позволяет различать морские цели на дистанции до 20000 м с угловыми размерами до 0,67 т.д.
Именно данная длина волны позволяет определить местонахождение цели максимально точно.
В аналогичных решениях применяется только один канал с длинной волны от 0,4 микрометра до 0,9 микрометра.
В настоящем изобретении за счёт использования тепловизионного канала, работающего по технологии SWIR с длинной волны от 1,4 мкм до 3 мкм обеспечивается более высокий уровень природных контрастов и, соответственно, выделения цели на фоне шумов, а также - в условиях минимальной освещённости. Кроме того этот диапазон в режиме наблюдения береговых объектов позволяет определить камуфлирующие покрытия, эффективные при длине волны в диапазоне от 0,4 микрометра до 0,9 микрометра, что позволяет идентифицировать также людей, использующих камуфлирующую форму на фоне зелени (листвы, высокой травы и прочее).
Для проведения эксперимента по определению точности, в сравнении с прототипом, была использована метрика "процент попаданий в цель". Эта метрика будет показывать, какая система более точно определяет нахождение цели.
Также была подготовлена тестовая среда, представляющая собой множество целей, причём количество целей для настоящего изобретения и количество целей для прототипа аналогичное и равно ста единицам.
Все цели были размещены на разном удалении от оптико-электронной системы управления, при чём расположение целей как для предлагаемого решения, так и для прототипа аналогичное.
После того, как при помощи оптико-электронной системы управления находят цель - производят выстрел.
Для сравнения результатов была составлена таблица (табл. 1):
Таблица 1 - Сравнение показателей точности прототипа и настоящего изобретения.
Исходя из показателей, представленных в таблице 1 видно, что процент попаданий прототипа 63%, что можно назвать удовлетворительным результатом. При этом процент попадания в цель настоящего изобретения составляет 97%, что говорит о повышении точности на 34% в сравнении с прототипом.
Эксперименты с опытным образцом показали, что благодаря отсутствию радиолокационных компонентов системы снижается вероятность обнаружения корабля-носителя оптико-электронной системы управления минимум в 24 раза, а также, процент попаданий составил 97%, что на 34% больше чем у прототипа. Данное соотношение показателей попаданий говорит о том, что настоящее изобретение обладает более высокими показателями точности, в отличие от прототипа.
Необходимость настоящего изобретения заключается в снижении вероятности обнаружения корабля - носителя устройства, что, в свою очередь, снижает вероятность поражения корабля - носителя, а также в повышении точности определения координат цели. При этом, настоящее изобретение обеспечивает решение задач в жёстких условиях внешних воздействующих факторов (рабочая температура от минус 40°С до плюс 40°С; любая освещённость, определённая временем суток и временем года, волнение моря до 5 баллов, скорость корабля - носителя до 40 узлов).
Таким образом, за счёт того, что оптико-электронная система управления корабельной артиллерийской установкой состоит из оптико-электронного блока и стойки управления, при этом оптико-электронный блок содержит блок камер и лазерный дальномер, размещённые на гиростабилизированной платформе, плату управления горизонтальным приводом, плату управления вертикальным приводом, вертикальный гироскопический датчик, горизонтальный гироскопический датчик, а стойка управления содержит пульт управления, пульт управления артиллерийской установкой, видеоконтрольное устройство, устройство документирования, баллистический вычислитель, плату цифровой обработки изображения, устройство сопряжения, модуль геопозиционирования, в которой первый выход блока камер соединён с первым входом видеоконтрольного устройства, второй выход блока камер соединён с первым входом платы цифровой обработки изображения, выход лазерного дальномера соединён со вторым входом платы цифровой обработки изображения, выход гиростабилизированной платформы соединён с третьим входом платы цифровой обработки изображения, выход вертикального гироскопического датчика соединён с первым входом платы управления вертикальным приводом, выход горизонтального гироскопического датчика соединён с первым входом платы управления горизонтальным приводом, выход платы управления вертикальным приводом соединён с первым входом гиростабилизированной платформы, выход платы управления горизонтальным приводом соединён со вторым входом гиростабилизированной платформы, первый выход пульта управления соединён с входом блока камер, выход модуля геопозиционирования соединён с четвёртым входом платы цифровой обработки изображения, первый выход платы цифровой обработки изображения соединён с входом устройства документирования, второй выход платы цифровой обработки изображения соединён с первым входом модуля связи с артиллерийской установкой, третий выход платы цифровой обработки изображения соединён с первым входом пульта управления артиллерийской установки, четвёртый выход платы цифровой обработки изображения соединён со вторым входом видеоконтрольного устройства, выход баллистического вычислителя соединён со вторым входом пульта управления артиллерийской установкой, первый выход пульта управления артиллерийской установкой соединён со вторым входом модуля связи с артиллерийской установкой, при этом баллистический вычислитель выполнен с возможностью получения сигнала требований таблиц стрельб, а гиростабилизированная платформа выполнена с возможностью получения сигнала от корабельной системы гиростабилизации, достигается такой технический результат, как снижение вероятности обнаружения корабля - носителя оптико-электронной системы управления. Кроме того, достигается такой технический результат, как повышение точности определения нахождения цели.
| название | год | авторы | номер документа |
|---|---|---|---|
| Оптико-электронный комплекс для оптического обнаружения, сопровождения и распознавания наземных и воздушных объектов | 2020 |
|
RU2760298C1 |
| ПАНОРАМНЫЙ ПРИБОР НАБЛЮДЕНИЯ КОМАНДИРА | 2018 |
|
RU2682141C1 |
| СПОСОБ СТРЕЛЬБЫ УПРАВЛЯЕМЫМ СНАРЯДОМ С ЛАЗЕРНОЙ ПОЛУАКТИВНОЙ ГОЛОВКОЙ САМОНАВЕДЕНИЯ И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ | 2019 |
|
RU2737634C2 |
| КОМПЛЕКС ВООРУЖЕНИЯ БОЕВОЙ МАШИНЫ | 2007 |
|
RU2351876C1 |
| СИСТЕМА УПРАВЛЕНИЯ ОГНЕМ НЕСКОЛЬКИХ СНАЙПЕРОВ | 2011 |
|
RU2498191C1 |
| СИСТЕМА ПРИЦЕЛИВАНИЯ ОРУЖИЯ | 2021 |
|
RU2784528C1 |
| Оптико-пеленгационная система кругового обзора | 2020 |
|
RU2748872C1 |
| СИСТЕМА РАЗВЕДКИ НАЗЕМНЫХ ОБЪЕКТОВ И ЦЕЛЕУКАЗАНИЯ | 2016 |
|
RU2625691C1 |
| КОМПЛЕКС ВООРУЖЕНИЯ БОЕВОЙ МАШИНЫ И СТАБИЛИЗАТОР ВООРУЖЕНИЯ | 2007 |
|
RU2360208C2 |
| СИСТЕМА НАВЕДЕНИЯ ОБЪЕКТА ВООРУЖЕНИЯ НА ЦЕЛЬ | 2003 |
|
RU2229670C1 |
Изобретение относится к области систем управления артиллерийскими установками или бортовым вооружением и касается оптико-электронной системы управления корабельной артиллерийской установкой. Оптико-электронная система состоит из оптико-электронного блока и стойки управления. Оптико-электронный блок содержит блок камер и лазерный дальномер, размещённые на гиростабилизированной платформе, плату управления горизонтальным приводом, плату управления вертикальным приводом, вертикальный гироскопический датчик, горизонтальный гироскопический датчик. Стойка управления содержит пульт управления, пульт управления артиллерийской установкой, видеоконтрольное устройство, устройство документирования, баллистический вычислитель, плату цифровой обработки изображения, устройство сопряжения и модуль геопозиционирования. Технический результат заключается в снижении вероятности обнаружения корабля и повышении точности определения нахождения цели. 7 з.п. ф-лы, 2 ил., 1 табл.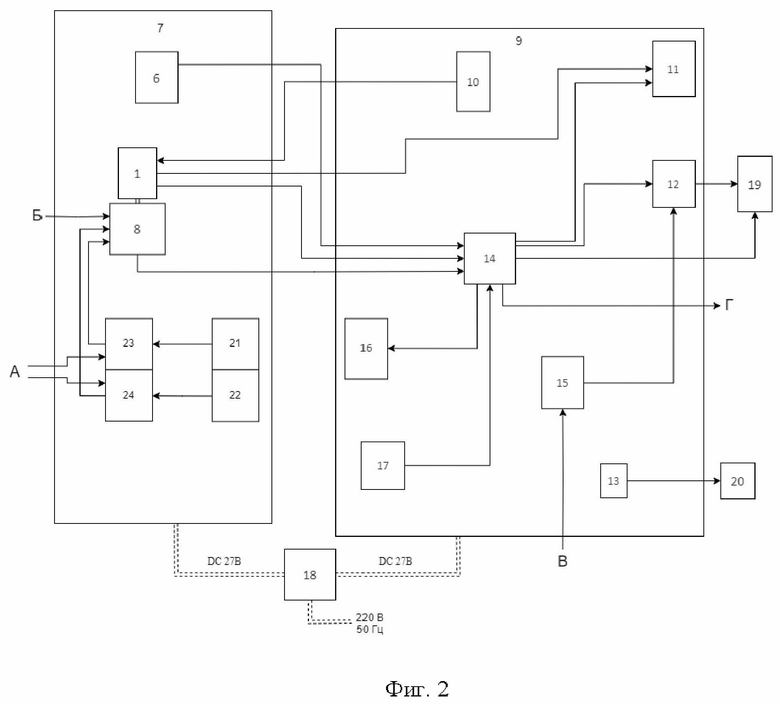
1. Оптико-электронная система управления корабельной артиллерийской установкой состоит из оптико-электронного блока и стойки управления, при этом оптико-электронный блок содержит блок камер и лазерный дальномер, размещённые на гиростабилизированной платформе, плату управления горизонтальным приводом, плату управления вертикальным приводом, вертикальный гироскопический датчик, горизонтальный гироскопический датчик, а стойка управления содержит пульт управления, пульт управления артиллерийской установкой, видеоконтрольное устройство, устройство документирования, баллистический вычислитель, плату цифровой обработки изображения, устройство сопряжения, модуль геопозиционирования, в которой первый выход блока камер соединён с первым входом видеоконтрольного устройства, второй выход блока камер соединён с первым входом платы цифровой обработки изображения, выход лазерного дальномера соединён со вторым входом платы цифровой обработки изображения, выход гиростабилизированной платформы соединён с третьим входом платы цифровой обработки изображения, выход вертикального гироскопического датчика соединён с первым входом платы управления вертикальным приводом, выход горизонтального гироскопического датчика соединён с первым входом платы управления горизонтальным приводом, выход платы управления вертикальным приводом соединён с первым входом гиростабилизированной платформы, выход платы управления горизонтальным приводом соединён со вторым входом гиростабилизированной платформы, первый выход пульта управления соединён с входом блока камер, выход модуля геопозиционирования соединён с четвёртым входом платы цифровой обработки изображения, первый выход платы цифровой обработки изображения соединён с входом устройства документирования, второй выход платы цифровой обработки изображения соединён с первым входом модуля связи с артиллерийской установкой, третий выход платы цифровой обработки изображения соединён с первым входом пульта управления артиллерийской установкой, четвёртый выход платы цифровой обработки изображения соединён со вторым входом видеоконтрольного устройства, выход баллистического вычислителя соединён со вторым входом пульта управления артиллерийской установкой, первый выход пульта управления артиллерийской установкой соединён со вторым входом модуля связи с артиллерийской установкой, при этом баллистический вычислитель выполнен с возможностью получения сигнала требований таблиц стрельб, а гиростабилизированная платформа выполнена с возможностью получения сигнала от корабельной системы гиростабилизации.
2. Оптико-электронная система управления по п.1, отличающаяся тем, что блок камер, смонтированный на гиростабилизированную платформу, содержит широкопольный телевизионный канал, узкопольный телевизионный канал, тепловизионные каналы, лазерный дальномер, при этом блок камер оснащён защитными стёклами, расположенными под углом 105 градусов к линии визирования.
3. Оптико-электронная система управления по п.2, отличающаяся тем, что тепловизионные каналы выполнены в виде совокупности коротковолнового тепловизионного канала, работающего по технологии SWIR с длиной волны от 1,4 до 3 мкм, и длинноволнового тепловизионного канала, работающего по технологии LWIR с длиной волны от 8 до 14 мкм.
4. Оптико-электронная система управления по п.2, отличающаяся тем, что телевизионные каналы интегрированы в систему с переменным фокусным расстоянием, выполненные с возможностью формирования поля зрения от узкопольного до широкопольного за счёт механизма трансфокатора.
5. Оптико-электронная система управления по п.1, отличающаяся тем, что содержит блок питания, выполненный с возможностью преобразования переменного тока в постоянный ток 27 В мощностью 1 кВт.
6. Оптико-электронная система управления по п.1, отличающаяся тем, что модуль геопозиционирования выполнен в виде модуля определения координат ГЛОНАСС - GPS, выполненного с возможностью вычисления географических координат цели за счёт данных о собственных координатах, значениях азимута, угла места и дальности, а также выполненного с возможностью передачи вычисленных координат.
7. Оптико-электронная система управления по п.1, отличающаяся тем, что содержит автомат сопровождения.
8. Оптико-электронная система управления по п.1, отличающаяся тем, что плата управления вертикальным приводом и плата управления горизонтальным приводом выполнены с возможностью получения сигнала ручного управления приводами гиростабилизированной платформы.
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА УПРАВЛЕНИЯ | 2000 |
|
RU2172010C1 |
| КОРАБЕЛЬНЫЙ АРТИЛЛЕРИЙСКИЙ КОМПЛЕКС С РЕЖИМОМ КОМПЕНСАЦИИ ВЛИЯНИЯ ДЕФОРМАЦИЙ КОРПУСА КОРАБЛЯ | 2013 |
|
RU2542821C1 |
| US 12007203 B1, 11.06.2024 | |||
| US 2023160662 A1, 25.05.2023. | |||

