Изобретение относится к области систем вооружения, а более конкретно к функционально самостоятельным модулям, обеспечивающим обнаружение, сопровождение, обработку координат различных наземных, наводных и воздушных целей, а также наведение на эти цели объекта вооружения. Изобретение может найти применение в зенитных ракетных и зенитных пушечно- ракетных комплексах (ЗРК и ЗПРК), противотанковых ракетных комплексах (ПТРК), а также в составе комплексов вооружения боевых кораблей.
Известно техническое решение, обеспечивающее обнаружение цели и наведение на нее объекта вооружения, примененное в полковом самоходном ЗРК “Стрела - 1”. Это решение основано на визуальном обнаружении цели оператором и наведении на нее объекта вооружения по азимуту и углу места с помощью оптического визира посредством управления оператором силовыми приводами азимута и угла места (Р.Д.Ангельский, И.В.Шестов “Отечественные зенитные ракетные комплексы”, М., ООО “Издательство Астрель”, 2002 г., стр. 171). Обладая несомненными достоинствами, указанное техническое решение не обеспечивает автоматическое обнаружение целей в круговом (панорамном) секторе обзора, выдачу оператору данных о расстояниях до целей и их скоростях, а также автоматическое наведение объекта вооружения на цель, выбранную оператором. Перечисленные недостатки ограничивают эффективность ЗРК “Стрела - 1” в условиях современного боя.
Известно техническое решение, примененное на ЗПРК “Тунгуска”, включающее азимутальный и угломестный следящие приводы наведения объектов вооружения, РЛС обнаружения цели кругового обзора с азимутальным приводом, РЛС сопровождения цели, аппаратуру обработки информации целеуказания, аппаратуру управления приводами, бортовой компьютер (Р.Д.Ангельский, И.В.Шестов “Отечественные зенитные ракетные комплексы”, М., ООО “Издательство Астрель”, 2002 г., стр. 206). Необходимым условием эффективной боевой работы данной системы наведения объекта вооружения на цель является облучение цели радиолокационными импульсами, что влечет за собой возможность обнаружения комплекса устройствами радиолокационной разведки противника. Кроме того, метод радиолокации, применяемый в данной системе, не достаточно эффективен при обнаружении целей, в которых используется технология “Стеллс”.
Наиболее близким к изобретению по совокупности существенных признаков является техническое решение, примененное в зенитном пушечно-ракетном комплексе по RU 2131577 (прототип), который содержит тепловизор; приводы наводимого объекта вооружения, несущие на своем рабочем органе наводимый объект вооружения; бортовой компьютер; инфракрасную оптико-электронную систему с азимутальным приводом, антенну с передатчиком команд ЗУР, блок выработки команд управления ЗУР, линии связи бортового компьютера с инфракрасной оптико-электронной системой и тепловизором и другие структурные элементы комплекса. В этом комплексе используются ЗУР, управляемые по радиолучу, который является демаскирующим фактором и делает возможным обнаружение комплекса средствами радиоэлектронной разведки противника. Кроме того, при работе станции в автономном режиме угол одновременного обзора по азимуту инфракрасной оптической системы целеуказания ограничен, что определяется конструкцией комплекса, предусматривающей в случае необходимости контроля за панорамой воздушного пространства разворот всей азимутальной платформы оператором и сканирование воздушного пространства по секторам. Это приводит к значительному увеличению времени поиска и, как следствие, к снижению боевой эффективности ЗРК.
Целью изобретения является повышение эксплуатационных свойств ЗРК и ЗПРК в условиях современного боя.
При использовании изобретения достигаются следующие технические результаты:
1. Обеспечивается обнаружение цели в условиях “молчания”, т.е. когда комплекс не может быть обнаружен по излучению его РЛС или лазерных приборов.
2. Обеспечивается нечувствительность системы к средствам радиочастотного подавления противника и к другим факторам, снижающим эффективность работы РЛС.
3. Обеспечивается возможность обнаружения множества целей в секторе кругового обзора, оценка оператором их досягаемости и выбор наиболее предпочтительной.
4. Обеспечивается возможность панорамного контроля над окружающим пространством как до, так и после выбора оператором цели или группы целей для боевой работы.
5. Обеспечивается работа системы в комбинированном (полуавтоматическом) режиме с сохранением возможности приоритетного воздействия оператора на любом этапе наведения, вплоть до момента включения объекта вооружения на боевую работу. Так, возможно оперативное изменение выбора цели, в случае появления новых, более опасных целей (например, неожиданное появление, в соответствии с известной противотанковой тактикой, “подскочившего” вертолета противника).
6. Уменьшается время измерения дальности цели.
7. Увеличивается точность наведения объекта вооружения на цель в режиме сопровождения (слежения).
Указанные технические результаты достигаются тем, что система наведения объекта вооружения на цель включает в себя основание, укрепленный на основании главный азимутальный цифровой или цифроаналоговый следящий привод, механически связанную с рабочим органом этого привода азимутальную платформу, имеющую возможность поворота в азимутальной плоскости, включает также укрепленный на азимутальной платформе угломестный цифровой или цифроаналоговый следящий привод, укрепленные на рабочем органе этого привода тепловизор и дальномер, включает в себя укрепленный на азимутальной платформе угломестный цифровой или цифроаналоговый следящий привод наводимого объекта вооружения, несущий на своем рабочем органе наводимый объект вооружения, включает в себя бортовой компьютер, инфракрасную оптико-электронную систему кругового обзора с собственным азимутальным приводом, а также включает в себя мониторы и пульты управления, которые образуют рабочее место экипажа; при этом бортовой компьютер отдельными электрическими или оптоэлектронными каналами связан с инфракрасной оптико-электронной системой кругового обзора, с тепловизором, с дальномером, с мониторами, с пультами управления, с цифровыми блоками каждого цифрового или цифроаналогового следящего привода и с наводимым объектом вооружения.
Обозначенная сущность изобретения связана с заявленными техническими результатами следующим образом.
Технические результаты 1-4 достигаются тем, что в системе наведения объекта вооружения на цель применена инфракрасная оптико-электронная система кругового обзора, функционирующая в совокупности с другими элементами системы в соответствии со своим назначением и техническими возможностями.
Технический результат 5, в совокупности с другими техническими результатами, достигается тем, что приоритетность цели определяется оператором, азимутальное и угломестное наведение дальномера и тепловизора осуществляются автоматически, целесообразность боевой работы по цели определяется оператором, захват цели в прицел осуществляется оператором или автоматически, а наведение объекта вооружения на цель осуществляется с помощью цифровых или цифроаналоговых следящих приводов.
Технический результат 6 в совокупности со всеми другими техническими результатами достигается тем, что в системе применен отдельный угломестный цифровой или цифроаналоговый следящий привод тепловизора и дальномера. Этот привод обладает высоким быстродействием, т.к. совокупные инерционные свойства дальномера и тепловизора (как механических объектов) невелики, поэтому процесс определения дальности цели занимает меньше времени по сравнению с техническим решением, в котором дальномер наводится на цель угломестным приводом объекта вооружения.
Технический результат 7 достигается благодаря выполнению структуры системы по двухканальной схеме. Канал предварительного наведения азимутальной платформы, дальномера и тепловизора осуществляется с использованием координат одной (выбранной) цели, которые вырабатываются инфракрасной оптико-электронной системой кругового обзора (ОЭСКО). Эта информация обновляется с низкой частотой (0.5 Гц для системы “Феникс”) и поэтому для осуществления непрерывного сопровождения цели потребовался бы экстраполирующий вычислительный алгоритм, который вносит дополнительную погрешность. Увеличение точности, связанное с исключением указанной погрешности, достигается тем, что тепловизор наводится каналом предварительного наведения в сектор пространства, содержащий выбранную цель, после чего координаты цели определяются по сигналу от тепловизора, причем этот сигнал квантуется с высокой частотой и по сравнению с быстродействием приводов может считаться непрерывным.
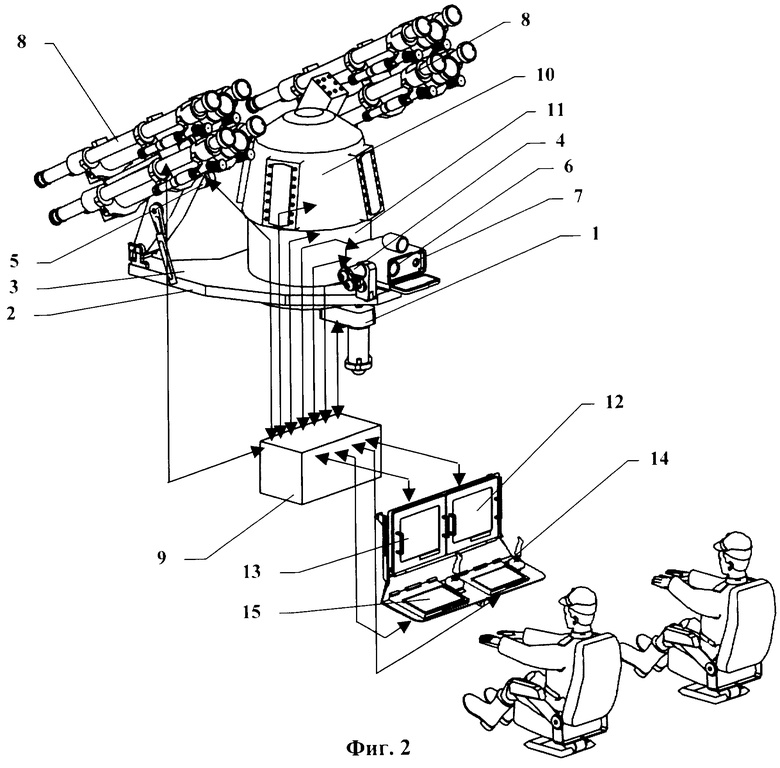
На фиг.1 изображена функциональная схема системы наведения объекта вооружения на цель.
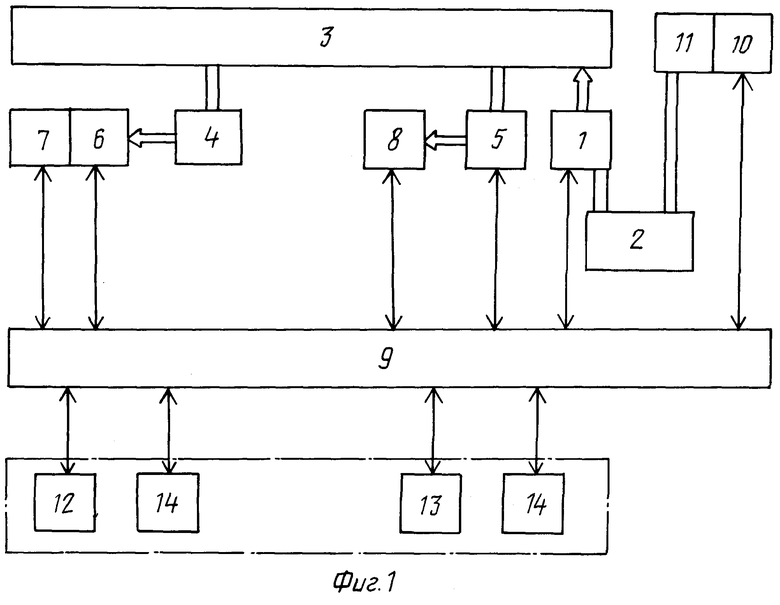
На фиг.2 изображена компоновочная схема системы наведения объекта вооружения на цель, дающая представление о внешнем виде системы.
Система наведения объекта вооружения на цель (фиг.1 и 2) содержит главный азимутальный цифровой (Герман-Галкин С.Г. и др. “Цифровые электроприводы с тиристорными преобразователями”, Ленинград, Энергоатомиздат, Ленинградское отделение, 1986, стр. 8, рис. 1-3) или цифроаналоговый (Справочник по автоматизированному электроприводу под ред. В.А.Елисеева и В.А.Шинянского, М.: Энергоатомиздат, 1983, стр. 356) следящий привод 1. Этот привод укреплен на основании 2, в качестве которого может выступать рама мобильного средства, несущего на себе систему. С рабочим органом главного азимутального следящего привода 1 механически связана азимутальная платформа 3, на которой расположены и укреплены угломестный цифровой или цифроаналоговый следящий привод 4 тепловизора и дальномера и угломестный цифровой или цифроаналоговый следящий привод 5 наводимого объекта вооружения. Азимутальная платформа 3 имеет возможность поворачиваться в азимутальной плоскости. Тепловизор 6 (http://dic.academic.ru/misc/enclp.nsf/ByID/NT0000B836, а также журнал Степанов P.M., Станская Т.Е., Меркин С.Ю. “Портативная тепловизионная камера длинноволнового ИК диапазона для широкого круга применений”, ж. “Прикладная физика” №3, 1999) и дальномер 7 (например, лазерный дальномер разработки НИИ “Полюс” г. Москва, http://www.polyus.msk.ru/RU/lrfru.html) укреплены на рабочем органе угломестного следящего привода 4 тепловизора и дальномера. Наводимый объект вооружения 8 укреплен на рабочем органе угломестного следящего привода 5 наводимого объекта вооружения. Система также включает в себя бортовой компьютер 9, укомплектованный интерфейсами внешних устройств, инфракрасную оптико-электронную систему кругового обзора (ОЭСКО) 10 с собственным азимутальным приводом 11 (это может быть система “Феникс” разработки ЗАО “Оптико-электронные технологии оборонительных систем” г.Москва, http://www.redstar.ru/2001/05/19_05/4 _03.html). Монитор 12, монитор 13, пульт управления 14 и пульт управления 15 образуют в совокупности рабочее место экипажа. Бортовой компьютер 9 с помощью отдельных электрических или оптоэлектронных каналов через входящие в его состав интерфейсы связан с инфракрасной оптико-электронной системой кругового обзора 10, с тепловизором 6, с дальномером 7, с цифровыми блоками каждого из следящих приводов 1, 4, 5, с наводимым объектом вооружения 8, с мониторами 12 и 13 и с пультами управления 14 и 15.
Система наведения объекта вооружения на цель работает следующим образом: инфракрасная оптико-электронная система кругового обзора 10 вращается относительно азимутальной оси с заданной частотой, что обеспечивается ее собственным азимутальным приводом 11. При этом обеспечивается круговой обзор окружающего пространства в телесном угле, определяемом диаграммой направленности ОЭСКО. Собственное тепловое излучение объектов, попадающих в сектор обзора ОЭСКО, фиксируется ее чувствительными элементами и преобразуется в информационный сигнал, который по электрическому или оптоэлектронному каналу поступает в бортовой компьютер 9. В бортовом компьютере производится обработка информационного сигнала, в результате чего определяются координаты азимута и угла места объекта. За один оборот ОЭСКО 10 определяются координаты множества объектов, расположенных в секторе обзора ОЭСКО (система “Феникс” определяет до 100 целей). Программно-аппаратные средства бортового компьютера 9 обеспечивают графическое изображение всех указанных объектов на экране монитора 12 в виде отметок на координатной сетке экрана. Командир экипажа выбирает из числа обнаруженных объектов цель и наводит с помощью пульта управления 14 на графическое изображение цели изображение курсора, после чего кнопкой пульта 14 дает сигнал-команду “Цель выбрана!”. По этой команде на цифровой блок главного азимутального следящего привода 1 от бортового компьютера 9 поступает сигнал, пропорциональный координате азимута выбранной цели, а на цифровой блок угломестного следящего привода 4 тепловизора и дальномера поступает сигнал, пропорциональный координате угла места выбранной цели. Следящие приводы 1 и 4 отрабатывают заданные координаты, в результате чего поворачивается азимутальная платформа 3 и поднимается рабочий орган угломестного следящего привода 4 тепловизора и дальномера, а тепловизор 6 и дальномер 7 оказываются наведенными в сектор пространства, содержащий выбранную цель. Сигнал с тепловизора 6 поступает в бортовой компьютер 9, где производится выделение изображения, определение координат и их производных попавшей в зону обзора цели, а графическое изображение этой цели появляется на экране монитора 13, что обеспечивается программно-аппаратными средствами бортового компьютера 9. После этого бортовой компьютер 9 выдает сигнал-команду на дальномер 7, который производит определение дальности цели и передает полученную информацию в бортовой компьютер 9. С этого момента на входы цифровых блоков следящих приводов 1 и 4 с бортового компьютера 9 поступают сигналы, пропорциональные текущим координатам цели, и указанные следящие приводы обеспечивают сопровождение цели, т.е. удержание оптической оси тепловизора 6 в направлении на цель. По данным о координатах, о производных этих координат и о дальности цели бортовым компьютером 9 производится полный расчет курсовых параметров цели и определение ее досягаемости объектом вооружения. На мониторах 12 и 13 при этом появляется информация, достаточная для принятия решения о целесообразности боевой работы по данной цели. Например, это может быть такая информация: цель встречная азимут 30, угол 15 дальность 5000, вход в зону через 10 секунд. Или такая информация: цель догон азимут 30, угол 15 дальность 2000, выход из зоны через 10 секунд. На основании этой информации командир принимает решение о целесообразности боевой работы по цели. При этом он или переключается на другую цель, или отдает устную команду оператору на уничтожение цели. Получив такую команду, оператор с помощью пульта управления 15 совмещает графическое изображение курсора-прицела с графическим изображением цели на экране монитора 13 и кнопкой пульта 15 подает сигнал-команду для наведения объекта вооружения на цель. Этот сигнал поступает на вход цифрового блока угломестного следящего привода 5 объекта вооружения, который наводит объект вооружения 8 на цель по углу места. После прохождения сигнала-команды наведения сигналы, поступающие на цифровые блоки следящих приводов 1 и 5 от бортового компьютера 9, содержат баллистические поправки, учитывающие скорость, дальность, высоту цели, угол встречи, тип наводимого объекта вооружения и др. Эти поправки вносятся баллистическим вычислителем, который программно реализован на бортовом компьютере 9. Предусматривается режим, по которому после совмещения изображения курсора-прицела с изображением цели на экране монитора 13, происходит “захват” цели, т.е. привязка управляющих сигналов, поступающих на вход цифровых блоков следящих приводов 1 и 5 к текущим координатам цели с учетом баллистических поправок. Окончание наведения объекта вооружения 8 на цель определяется по критерию минимального рассогласования задающих воздействий, поступающих с бортового компьютера 9, с сигналами обратных связей следящих приводов 1 и 5. Сигнал об окончании наведения преобразуется бортовым компьютером в информационное сообщение “Готов!” на экране монитора 13. Если в качестве объекта вооружения используется артиллерийская ствольная система, то после этого оператор кнопкой пульта управления 15 приводит в действие объект вооружения, т.е. начинает обстрел цели. В это время командир следит за информацией на мониторе 12 и в случае появления новых, более опасных, целей в круговом секторе обзора (например, при появлении в соответствии с известной противотанковой тактикой “подскочившего” вертолета противника) или при получении по линии связи приоритетного целеуказания от дивизионной станции обнаружения может принять решение об изменении выбора цели на любом этапе работы. Это обеспечивается приоритетом пульта управления 14, реализованным с помощью программно-аппаратных средств бортового компьютера 9. В том случае если в качестве объекта вооружения используется зенитная ракета, оснащенная инфракрасной головкой самонаведения и встроенной системой телеметрического контроля готовности (например, ЗРК “Стингер”, Н.Л. Волковский “Энциклопедия современного оружия и боевой техники”. Том 2, изд. “Полигон”, СПБ, 1997, стр. 199), то с пульта управления 15 одновременно с сигналом-командой наведения поступает сигнал-команда на приведение зенитной ракеты в состояние боевой готовности. Захват цели инфракрасной головкой самонаведения определяется по сигналу с этой головки, который через программно-аппаратные средства бортового компьютера 9 преобразуется в информационное сообщение “Вижу цель” на экране монитора 13. Получение такого сообщения является для оператора свидетельством боевой готовности системы. Кнопкой пульта управления 15 подается сигнал-команда на запуск зенитной ракеты.
Программно-аппаратные средства бортового компьютера 9 предусматривают возможность перенастройки конфигурации рабочего места экипажа таким образом, чтобы управление системой было возможно с одного (любого) из пультов управления и с одним (любым) монитором. Необходимость такой перенастройки может возникнуть по оперативным или организационным причинам. Структура системы построена с учетом наиболее гибкого и эффективного сочетания современных средств инфракрасной оптики, автоматики и вычислительной техники с возможностями и боевым опытом экипажа.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ КОМПЛЕКСНЫМИ МЕТОДАМИ БОРЬБЫ С МАЛОГАБАРИТНЫМИ БЕСПИЛОТНЫМИ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ | 2014 |
|
RU2578524C2 |
| ПОДЪЕМНО-ПОВОРОТНОЕ УСТРОЙСТВО С СИСТЕМОЙ УПРАВЛЕНИЯ | 2002 |
|
RU2215971C1 |
| ОПТИКО-ПЕЛЕНГАЦИОННАЯ СИСТЕМА КРУГОВОГО ОБЗОРА | 2007 |
|
RU2356063C1 |
| МУЛЬТИСПЕКТРАЛЬНАЯ СИСТЕМА И СПОСОБ ОПТИКО-ЭЛЕКТРОННОГО НАБЛЮДЕНИЯ ОХРАНЯЕМОЙ ТЕРРИТОРИИ | 2014 |
|
RU2563557C2 |
| СИСТЕМА ЗАЩИТЫ ОБЪЕКТА ОТ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2023 |
|
RU2823195C1 |
| Мобильный тепловизионный комплекс | 2022 |
|
RU2809472C1 |
| ЗЕНИТНАЯ САМОХОДНАЯ УСТАНОВКА | 2007 |
|
RU2348890C2 |
| БРОНИРОВАННАЯ БАШНЯ "ТАЙФУН" БОЕВОЙ МАШИНЫ | 2003 |
|
RU2254546C1 |
| ОПТИКО-ЭЛЕКТРОННЫЙ МОДУЛЬ БОЛЬШОЙ ДАЛЬНОСТИ "ФОКУС-Д" | 2009 |
|
RU2427006C2 |
| АВТОМАТИЗИРОВАННОЕ УСТРОЙСТВО ПОДАЧИ ПОЖАРНО-СПАСАТЕЛЬНОЙ ЛЕСТНИЦЫ ДЛЯ АВТОМОБИЛЕЙ СЛУЖБЫ СПАСЕНИЯ И АВТОЛЕСТНИЦ (ВАРИАНТЫ) | 2011 |
|
RU2496541C2 |
Изобретение относится к области систем вооружения, а более конкретно к функционально самостоятельным модулям, обеспечивающим обнаружение, сопровождение, обработку координат различных наземных, наводных и воздушных целей, а также наведение на эти цели объекта вооружения. Технический результат - повышение эксплуатационных свойств ЗРК. Обеспечивается обнаружение цели в условиях “молчания”, т.е. когда система не может быть обнаружена по излучению его РЛС или лазерных приборов. Обеспечивается нечувствительность системы к средствам радиочастотного подавления противника и к другим факторам, снижающим эффективность работы РЛС. Обеспечивается возможность обнаружения множества целей в секторе кругового обзора, оценка оператором их досягаемости и выбор наиболее предпочтительной для боевой работы. Обеспечивается возможность панорамного контроля над окружающим пространством как до, так и после выбора оператором цели или группы целей для боевой работы. Обеспечивается работа системы в комбинированном (полуавтоматическом) режиме с сохранением возможности приоритетного воздействия оператора на любом этапе наведения, вплоть до момента включения объекта вооружения на боевую работу. Уменьшается время измерения дальности цели. Увеличивается точность наведения объекта вооружения на цель в режиме сопровождения (слежения). В системе применены цифровые или цифроаналоговые азимутальный и угломестные следящие приводы, инфракрасная оптико-электронная система кругового обзора, тепловизор, дальномер, бортовой компьютер, мониторы и пульты управления экипажа. Структура системы построена с учетом наиболее гибкого и эффективного сочетания современных средств инфракрасной оптики, автоматики и вычислительной техники с возможностями и боевым опытом экипажа. 3 з.п. ф-лы, 2 ил.
| ЗЕНИТНЫЙ РАКЕТНО-ПУШЕЧНЫЙ КОМПЛЕКС | 1998 |
|
RU2131577C1 |
| АНГЕЛЬСКИЙ Р.Д., ШЕСТОВ И.В | |||
| Отечественные зенитные ракетные комплексы | |||
| - М.: ООО Издательство “Астрель”, 2002, с.206 | |||
| УСТРОЙСТВО ДЛЯ ОБЕСПЕЧЕНИЯ ЖИДКОГО ВОССТАНОВИТЕЛЯ ДЛЯ УСТРОЙСТВА ОЧИСТКИ ОТРАБОТАВШИХ ГАЗОВ | 2011 |
|
RU2547045C2 |
| СПОСОБ ОСВОЕНИЯ СКВАЖИНЫ | 1998 |
|
RU2127805C1 |
| GB 1064774, 12.04.1967. | |||

