Изобретение относится к оптико-пеленгационным системам секторного и кругового обзора, обеспечивающим обнаружение, сопровождение, обработку координат различных наземных, наводных и воздушных объектов.
Изобретение может найти применение в составе комплексов оптико-электронного и навигационного оборудования морских и авиационных носителей, наземных наблюдательных и стрельбовых комплексах.
Известен оптико-электронный информационный комплекс [патент РФ №2406056 от 10.12.2010 г.], состоящий из дневной телевизионной камеры на основе кремниевой ПЗС матрицы, тепловизора с матрицей на основе сурьмянистого индия и дальномера на неодимовом лазере. Эти оптико-электронные блоки, находящиеся в герметическом отсеке с оптическими окнами, установлены на гиростабилизированном двухосном карданном подвесе с горизонтальным и вертикальными приводами.
К достоинствам выбранного в качестве аналога устройства является возможность стабилизации визирных осей теле-тепловизионных каналов, что позволяет надежно автосопровождать малоразмерные объекты в условиях качки, транспортной тряски и т.п. К недостаткам можно отнести невозможность обзора пространства при одновременном автосопровождении объекта, возможности автосопровождения двух и более объектов по трем координатам при переходе от обнаружения к автосопровождению.
Наиболее близким к заявляемому устройству является оптико-пеленгационная система кругового обзора, имеющая N оптико-электронных каналов, объективы широкого поля зрения которых равномерно расположены в азимутальной плоскости на окружности с радиальным расположением их оптических осей, причем поля обзора этих объективов перекрывают сканируемое пространство в азимутальной плоскости без пропусков; оптико-электронный канал механического сканирования пространства с поворотным зеркалом с возможностью поворота как по азимуту, так и по углу места и светодальномерный канал. Кроме того, объективы оптико-электронных каналов выполнены как объективы широкого поля зрения, а объектив оптико-электронного канала механического сканирования выполнен как объектив узкого поля зрения. Рабочим диапазоном оптико-электронных каналов электронного сканирования может являться диапазон 8-12 мкм, а рабочим диапазоном оптико-электронного канала механического сканирования может являться диапазон 3-5 мкм [Патент РФ №2356063 от 20.05.2009 г].
Достоинством устройства является возможность кругового обзора пространства и повышение точности определения азимутальных и угломестных координат объекта с использованием узкопольного канала механического сканирования по ее изображению на экране монитора. К недостаткам можно отнести сравнительно небольшую дальность обнаружения малоразмерных объектов из-за использования широкоугольных объективов оптико-электронных каналов электронного сканирования, отсутствие стабилизации осей визирования каналов электронного и механического сканирования, что существенно снижает точность определения координат обнаруживаемых объектов при установке устройства на подвижные объекты (корабли, автомобили и т.д.).
Достигаемым техническим результатом изобретения является увеличение дальности действия, повышение точности определения координат объекта в условиях тряски и качки, обеспечения непрерывного обзора пространства и одновременного сопровождения 2 и более объектов по 3 координатам (азимут, угол места и дальность) в пределах определенного сектора или не менее 2N объектов при круговом обзоре, уменьшении времени обзора пространства, возможности выделения объектов на фоне помех.
Технический результат достигается тем, что многоканальная оптико-электронная система для обзора и сопровождения включает N механически связанных модулей обзора и автосопровождения с перекрытием сканируемого пространства в азимутальной плоскости; модуль обзора выполнен в виде гиростабилизированного многоспектрального оптико-электронного блока, включающего телевизионный канал видимого диапазона, телевизионный канал ближнего ИК диапазона (0,9…1,7 мкм) и тепловизионный канал среднего ИК диапазона (3…5 мкм) или дальнего ИК диапазона (8…12 мкм) с одинаковыми углами полей зрения; модуль автосопровождения выполнен в виде двух независимых гиростабилизированных оптико-электронных блоков с установленными теле-тепловизионным и дальномерным каналами с возможностью одновременного сопровождения не менее 2 объектов по трем координатам (по углу места, азимуту и дальности) и менее 2N объектов при круговом обзоре пространства.
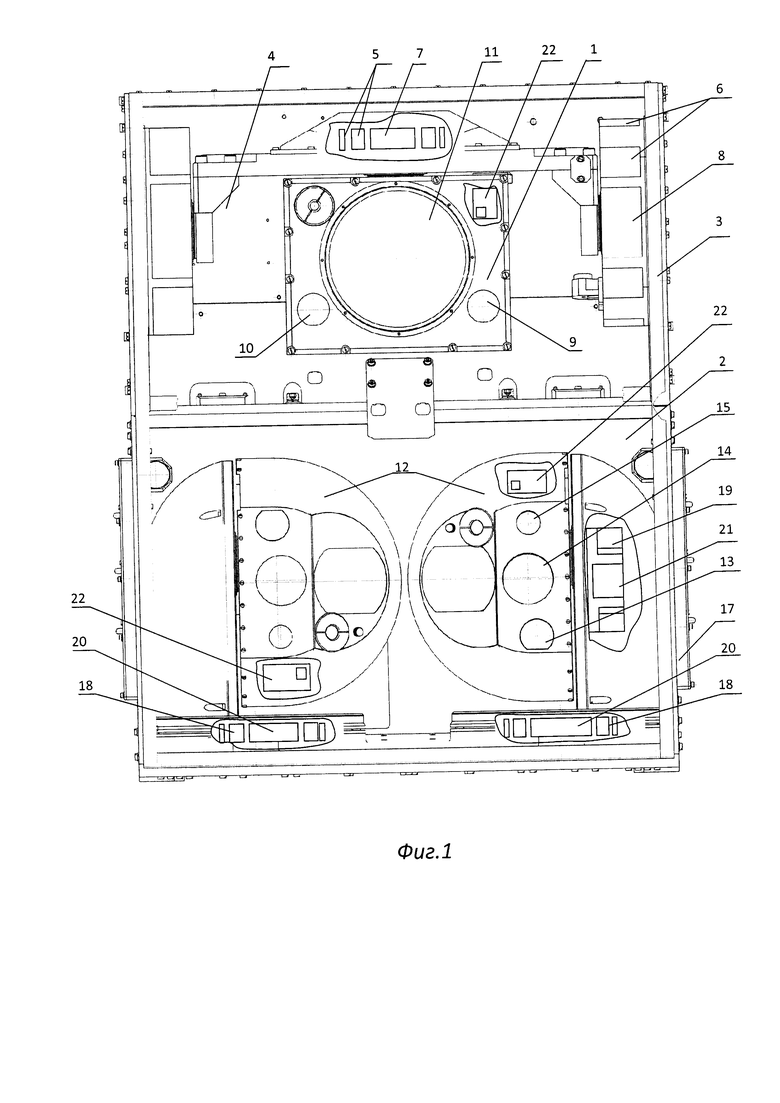
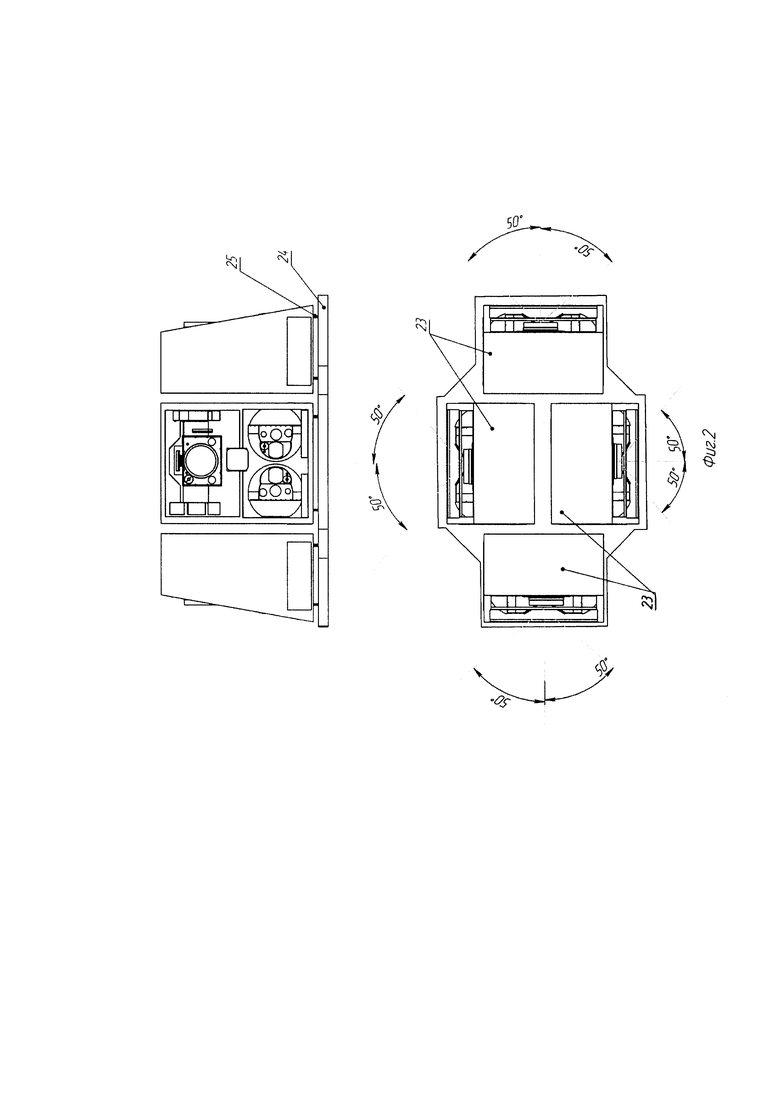
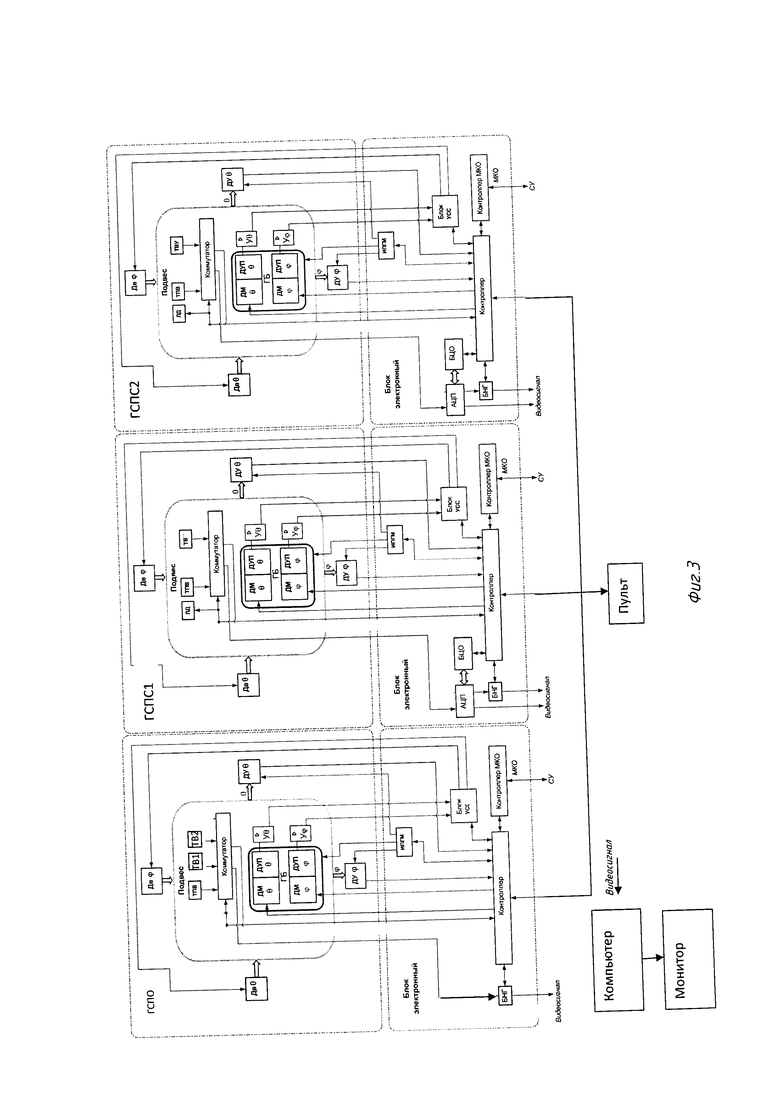
Изобретение иллюстрируется чертежами, на которых изображена конструктивная схема отдельного модуля секторного обзора и автосопровождения (Фиг. 1) и расположение 4 модулей (N=4) для реализации кругового обнаружения и автосопровождения (Фиг. 2). Блок-схема модуля секторного обнаружения показана на Фиг. 3.
Оптико-пеленгационная система (ОПС) секторного обзора и автосопровождения включает модуль обнаружения 1, модуль автосопровождения 2, металлический каркас 3 для размещения модуля обнаружения 1 и модуля автосопровождения 2 (Фиг. 1). Модуль обнаружения 1 размещен на двухосном подвесе 4, вращающимся по курсовому углу с помощью двигателя 5, а по углу места - с помощью двигателя 6. Координаты по курсовому углу и углу места определяются датчиками угла 7 и 8 соответственно. В состав подвеса 4 входят телевизионный канал видимого диапазона 9, телевизионный канал ближнего ИК диапазона 0,9-1,7 мкм 10, тепловизионный канал спектрального диапазона 3…5 мкм 11 или тепловизионный канал спектрального диапазона 8…12 мкм.
Модуль автосопровождения 2 состоит из двух одинаковых гиростабилизированных приборов сопровождения (ГСПО) 12, включающих телевизионные каналы видимого диапазона 13, приемные каналы 14 и передающие каналы 15 лазерных дальномеров, тепловизионный канал 16 спектрального диапазона 3…5 мкм или тепловизионный канал спектрального диапазона 8…12 мкм. Независимые модули автосопровождения 2 каждый размещены на двухосном подвесе 17, вращающемся по курсовому углу (КУ) с помощью двигателя 18, а по углу места (УМ) - с помощью двигателя 19. Координаты по азимуту и углу места определяются датчиками угла 20 и 21 соответственно. Подвес 17 имеет две степени свободы относительно основания каркаса 3 и стабилизируется по 2-м каналам: по ϕ (КУ) и θ (УМ) системой гиростабилизации, чувствительным элементом которой являются гироблоки (ГБ) 22.
Оптико-пеленгационная система кругового обзора и сопровождения в примере конкретного исполнения (Фиг. 2) состоит из 4х механически связанных модулей секторного обзора и сопровождения 23, расположенных на платформе 24 таким образом, что оптические оси их теле-тепловизионных каналов взаимоперпендикулярные в азимутальной плоскости в исходном положении и перекрываются в пределах ±5° при предельных углах сканирования. Горизонтирование модулей секторного обзора и сопровождения 23 на платформе 24 производится с помощью установочно-регулировочных винтов 25.
Оптико-пеленгационная система ОПС кругового обзора и автосопровождения работает следующим образом.
В режиме «Обнаружение» подвесы 4х модулей обнаружения ГСПО1…ГСПО8, расположенные с перекрытием визирных осей ±5° в азимутальной плоскости (Фиг. 2) сканируют пространство по азимуту в пределах 360° и от минус 20° до 80° по углу места с 10% перекрытием. Видеоинформация из соответствующих секторов просматриваемого пространства с выхода тепловизионных каналов ТПВ, телевизионных каналов ТВ1 видимого диапазона и телевизионных каналов ТВ2 ближнего ИК диапазона (0,9…1.7 мкм) через коммутатор и блок наложенной графики БНГ (Фиг. 3) подается на компьютер для накопления и «сшивания» границ локальных кадров для получения полного кадра обзора с последующей передачей на монитор. На мониторе оператор имеет возможность наблюдать фоновую обстановку в реальном режиме времени, формируемую теле-тепловизионными каналами с одинаковыми углами полей зрения как в видимом, так и в ближнем (0,9…1,7 мкм), и дальнем 3…5 мкм или 8…12 мкм диапазонах, что позволяет ему частично селектировать наблюдаемые объекты по тепловому контрасту, их подвижности, в том числе в условиях тумана, задымленности и т.д.
Для определения степени важности объекта наблюдения на него по ранее известным координатам по КУ и УМ, поступающим в контроллер от датчиков угла ДУϕ и ДУθ соответственно, наводится один из блоков автосопровождения ГСПО, объект берется на автосопровождение, проводится его дальнометрирование, определяется скорость и направления движения и принимается решение об его дальнейшем автосопровождении.
В режиме «Автосопровождение» блок цифровой обработки БЦО осуществляет обработку видеосигнала по специальным алгоритмам в режиме автосопровождения. Информация о способе и стробе автосопровождения поступает в БЦО из контроллера ОПС. БЦО на каждом кадре определяет координатное рассогласование между осью визирования и положением объекта сопровождения. Информация о рассогласовании поступает в контроллер ОПС, который формирует для усилителя стабилизации и слежения (УСС) информацию о требуемой скорости движения подвеса относительно осей ϕ и θ. Двигатели Двϕ и Двθ, управляемые УСС, обеспечивают разворот подвеса до совмещения координат объекта сопровождения и оси визирования. Для повышения контраста объекта сопровождения относительно фона в БЦО предусмотрена гамма-коррекция видеосигнала.
Информация о текущих координатах объектов сопровождения по КУ, УМ и дальности передается на баллистический вычислитель. При наличии второго объекта в секторе автосопровождения первого объекта к его автосопровождению подключается второй ГСПО.
При вынужденном вращении платформы 24 и вместе с ним корпуса гироблоков 22 в инерциальном пространстве, например, вследствие качки, появляется рассогласование между сохраняющим свое положение в инерциальном пространстве ротором гироскопа и корпусом гироблока 22. Угол этого рассогласования измеряется датчиками углов прецессии гироблока ДУПϕ и ДУПθ (Фиг. 3). Сигналы от датчиков углов прецессии, пропорциональные углу рассогласования между корпусом и ротором гироскопа ГБ, усиливаются предварительными усилителями Уϕ и Уθ, расположенными в непосредственной близости от ГБ, и поступают в блок УСС. Блок УСС формирует такие сигналы управления двигателями Двϕ и Двθ, чтобы двигатели разворачивали подвес по осям ϕ и θ в направлении, устраняющем угловое рассогласование между корпусом и ротором ГБ, и со скоростью пропорциональной углу этого рассогласования. То есть, если скорость подвеса будет меньше скорости вынужденного вращения платформы ОПС, угол рассогласования и, соответственно, скорость двигателей Двϕ и Двθ будут увеличиваться, а если скорость разворота подвеса будет превышать скорость вынужденного вращения, угол рассогласования и скорость разворота подвеса будут уменьшаться. Следовательно, скорость разворота подвеса поддерживается практически равной по величине и противоположной по знаку скорости вынужденного вращения ГБ в инерциальном пространстве, т.е. подвес совершает разворот, рассогласования и скорость разворота подвеса будут уменьшаться. Следовательно, скорость разворота подвеса поддерживается практически равной по величине и противоположной по знаку скорости вынужденного вращения ГБ в инерциальном пространстве, т.е. подвес совершает разворот, компенсирующий вынужденное движение ГБ, чем обеспечивается стабилизация корпуса ГБ и визирных осей ОПС в инерциальном пространстве.
Таким образом, из вышеизложенного, подтверждается:
- возможность увеличения точности определения координат объекта сопровождения, используя гиростабилизацию визирных осей;
- возможность увеличения дальности действия за счет применения узких полей зрения по сравнению с аналогом;
- обеспечение непрерывного обзора пространства и одновременного сопровождения не менее 2 объектов по 3 координатам (азимут, угол места и дальность) в пределах определенного сектора или не менее 2N объектов при круговом обзоре;
- уменьшение времени обзора и возможность обнаружения целей на фоне помех за счет применения теле-тепловизионных каналов, работающих в 3х спектральных диапазонах с одинаковыми полями зрения.
Пример практичного применения
Промышленная применимость изобретения определяется тем, что предлагаемая оптико-пеленгационная система кругового обзора и автосопровождения может быть изготовлена в соответствии с предлагаемым описанием и чертежами на основе известных комплектующих изделий при использовании современного контрольно-юстировочного оборудования и материалов. Основными компонентами блока стабилизации и слежения могут быть моментные двигатели типа ДБ-001М разработки OA «НПО том числе с применением процессорных микросхем серии TMS. Фотоприемное устройство телевизионного канала видимого диапазона может быть реализовано на базе современной мегапиксельной чувствительной КМОП матрицы, например, НПК «Фотоника». Телевизионный канал ближнего ИК диапазона (0,9…1,7 мкм) может быть реализован на многоканальном фотоприемном устройстве форматом 640×512 элементов, изготавливаемом на НПО «Орион». Тепловизионный канал среднего ИК диапазона (3…5 мкм) может быть реализован на базе охлаждаемого модуля, выпускаемого НПО «Орион». Тепловизионный канал дальнего ИК диапазона (8…12 мкм) может быть реализован на базе охлаждаемой тепловизионной камеры типа «Ястреб ДВ» (ЦНИИ «Циклон) или унифицированного охлаждаемого фотоприемного устройства МФПУ-Д на основе матрицы форматом 640×512 элементов и двухпольного объектива (ИФП СО РАН), или полноформатного матричного фотоприемника фирмы «Силар», г. Санкт-Петербург. Фотоприемное устройство дальномерного канала может быть реализовано на базе ФУО-157 ФГУП НПО «Орион», лазерные излучатели могут быть использованы в классе твердотельных импульсно-периодических лазеров, разработки OA «НПО «Карат». Оптическая система теле-тепловизионных каналов может быть реализована на зеркальных (металлооптических) элементах в сочетании с линзовыми.
| название | год | авторы | номер документа |
|---|---|---|---|
| Оптико-электронный комплекс для оптического обнаружения, сопровождения и распознавания наземных и воздушных объектов | 2020 |
|
RU2760298C1 |
| ОПТИКО-ПЕЛЕНГАЦИОННАЯ СИСТЕМА КРУГОВОГО ОБЗОРА | 2007 |
|
RU2356063C1 |
| Оптико-электронный комплекс для оптического обнаружения, сопровождения и распознавания наземных и воздушных объектов | 2019 |
|
RU2701177C1 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА УПРАВЛЕНИЯ КОРАБЕЛЬНОЙ АРТИЛЛЕРИЙСКОЙ УСТАНОВКОЙ | 2024 |
|
RU2828168C1 |
| ЗЕНИТНАЯ САМОХОДНАЯ УСТАНОВКА | 2007 |
|
RU2348890C2 |
| Комбинированная многоканальная головка самонаведения | 2017 |
|
RU2693028C2 |
| СПОСОБ И УСТРОЙСТВО ОПТИЧЕСКОЙ ЛОКАЦИИ | 2014 |
|
RU2562391C1 |
| ПРИБОР ПАНОРАМНЫЙ | 2018 |
|
RU2708535C1 |
| УСТРОЙСТВО СКАНИРОВАНИЯ И СТАБИЛИЗАЦИИ ОПТИЧЕСКОГО ИЗОБРАЖЕНИЯ | 2011 |
|
RU2471211C1 |
| СПОСОБ И СИСТЕМА ДАЛЬНЕГО ОПТИЧЕСКОГО ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЛЕТЯЩЕГО В СТРАТОСФЕРЕ ИЛИ НА БОЛЬШОЙ ВЫСОТЕ СО СВЕРХЗВУКОВОЙ СКОРОСТЬЮ ОБЪЕКТА ПО КРИТЕРИЯМ КОНДЕНСАЦИОННОГО СЛЕДА ЕГО СИЛОВОЙ УСТАНОВКИ В АТМОСФЕРЕ | 2012 |
|
RU2536769C2 |
Изобретение относится к оптико-пеленгационным системам секторного и кругового обзора, обеспечивающим обнаружение, сопровождение, обработку координат различных наземных, наводных и воздушных объектов. Техническим результатом является увеличение дальности действия, повышение точности определения координат объектов в условиях тряски и качки, обеспечение непрерывного обзора пространства и одновременного сопровождения не менее 2 объектов по 3 координатам (азимут, угол места и дальность) в пределах определенного сектора или не менее 2N объектов при круговом обзоре, уменьшении времени обзора пространства, возможности выделения объектов на фоне помех. Результат достигается тем, что многоканальная оптико-электронная система для обзора и сопровождения включает N механически связанных модулей обзора и автосопровождения с перекрытием сканируемого пространства в азимутальной плоскости, модуль обзора выполнен в виде гиростабилизированного многоспектрального оптико-электронного блока, включающего телевизионный канал видимого диапазона, телевизионный канал ближнего ИК-диапазона (0,9…1,7 мкм) и тепловизионный канал среднего ИК-диапазона (3…5 мкм) или дальнего ИК-диапазона (8…12 мкм) с одинаковыми углами полей зрения; модуль автосопровождения выполнен в виде двух независимых гиростабилизированных оптико-электронных блоков с установленными телетепловизионным и дальномерным каналами с возможностью одновременного сопровождения не менее 2 объектов по трем координатам (по углу места, азимуту и дальности) при секторном обзоре и менее 2N объектов при круговом обзоре пространства. 3 ил.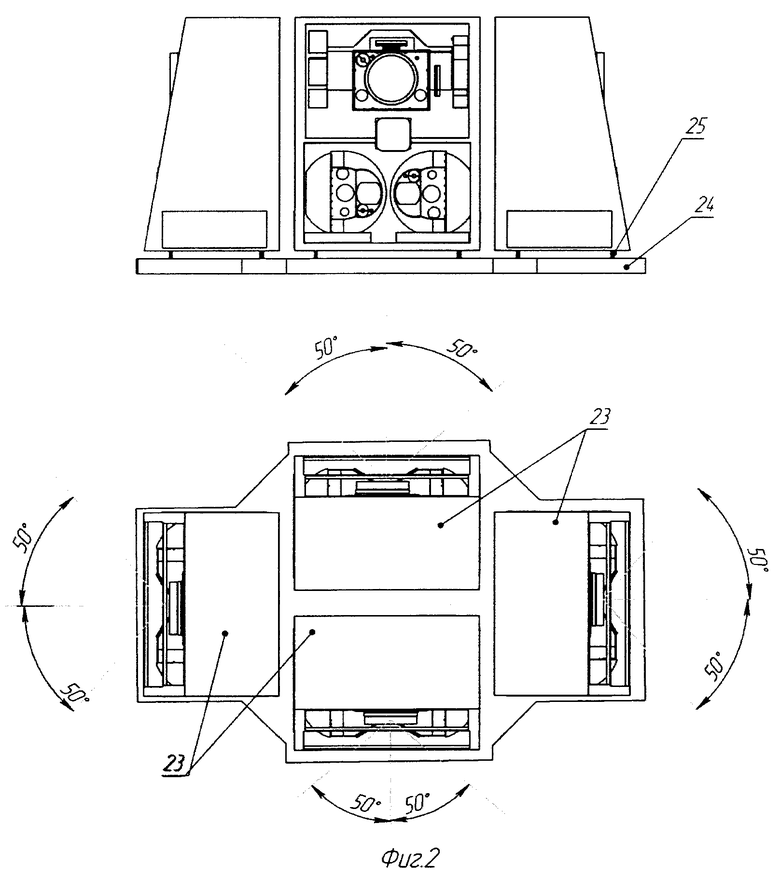
Оптико-пеленгационная система кругового обзора, имеющая N оптико-электронных каналов электронного сканирования с объективами широкого поля зрения в рабочем диапазоне 8-12 мкм и оптико-электронный канал механического сканирования в рабочем диапазоне 3-5 мкм с объективом узкого поля зрения, светодальномерный канал, плоское зеркало, расположенное на оптической оси объектива под углом к ней и выполненное с возможностью поворота как по азимуту, так и по углу места, отличающаяся тем, что оптико-электронный канал механического сканирования с плоским зеркалом выполнен в виде многоспектрального гиростабилизированного прибора автосопровождения с двумя и более независимыми однотипными гиростабилизированными модулями с тепловизионными, светодальномерными и телевизионными каналами видимого диапазона, а оптико-электронные каналы электронного сканирования выполнены в виде гиростабилизированных многоспектральных оптико-электронных модулей обнаружения, включающих телевизионные каналы видимого и короткого ИК-диапазона (0,9…1,7 мкм), тепловизионные каналы среднего ИК-диапазона (3…5 мкм) или дальнего ИК-диапазона (8…12 мкм) с одинаковыми угловыми размерами полей зрения.
| ОПТИКО-ПЕЛЕНГАЦИОННАЯ СИСТЕМА КРУГОВОГО ОБЗОРА | 2007 |
|
RU2356063C1 |
| US 6396235 B1, 2002.05.28 | |||
| US 7292319 B1, 2007.11.06 | |||
| US 7663662 B2, 2010.02.16 | |||
| US 2007086087 A1, 2007.04.19 | |||
| СПОСОБ И УСТРОЙСТВО ОПТИЧЕСКОЙ ЛОКАЦИИ | 2014 |
|
RU2562391C1 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА ОБНАРУЖЕНИЯ ОБЪЕКТОВ | 2016 |
|
RU2639321C1 |
| US 9858712 B2, 2018.01.02 | |||
| US 9813618 B2, 2017.11.07 | |||
| US 8400511 B2, 2013.03.19 | |||
| US 10704864 B1, 2020.07.07 | |||
| US 3723744 A, 1973.03.27. | |||

