Изобретение относится к землеройной технике, например рыхлителям, и в частности к системам управления.
Известна система управления рыхлителя, содержащая гидронасос, гидробак, гидроцилиндр изменения угла резания, гидрораспределитель с электромагнитным управлением, соединенный с блоком управления (SU 1003764, E02F9/20).
Недостаток известной системы управления заключается в невозможности автоматического управления изменением угла резания в зависимости от величины сопротивления резанию грунта. Это обусловливает повышенное буксование движителей и увеличение затрат энергии, уменьшение скорости базовой машины и в итоге уменьшение производительности.
Наиболее близкой к заявляемому изобретению по технической сущности и принятая заявителем в качестве прототипа является система управления углом резания рыхлителя (RU 2634441, E02F3/85, 9/22).
Известная система управления содержит гидронасос, гидробак, гидроцилиндр изменения угла резания, штоковая полость которого сообщена с гидроаккумулятором, гидрораспределитель с электромагнитным управлением, соединенный с блоком управления. Однако и вторая известная система управления имеет недостатки, которые заключаются в том, что регулирование угла резания осуществляется в зависимости от показаний датчика нагрузки, определяемых по положению педали подачи топлива, и эти показания не зависят от реальной величины сопротивления, возникающего в результате взаимодействия рабочего органа с грунтом. Второй датчик известной системы управления измеряет частоту вращения выходного вала трансмиссии, преобразуя ее в величину теоретической скорости базовой машины в виде электрического сигнала. Однако величина теоретической скорости может существенно отличаться и, как правило, отличается от величины действительной скорости базовой машины. Так, например, при некоторых грунтовых условиях современные энергонасыщенные базовые машины могут, при буксовании движителей стоять на месте, имея определенную теоретическую скорость при нулевой действительной скорости. Поэтому и вторая известная система управления имеет аналогичный недостаток, а именно увеличение затрат энергии на буксование движителей, уменьшение скорости и, соответственно, производительности. Кроме того, при замкнутой поршневой полости гидроцилиндра изменения угла резания, на элементы рабочего оборудования и базовую машину передаются большие динамические нагрузки, возникающие в процессе скола грунта. Это снижает надежность рабочего оборудования и базовой машины.
Целью предлагаемого изобретения является устранение недостатков, отмеченных в известных технических решениях. Техническая задача, решаемая предлагаемым изобретением, заключается в реализации системы управления углом резания в зависимости от изменения параметров внешнего воздействия на зуб рыхлителя, а именно от величины сопротивления, возникающего при рыхлении. Величина сопротивления определяется по изменению коэффициента буксования путем сравнения теоретической и действительной скоростей базовой машины. Одновременно решается задача снижения динамических нагрузок на рабочее оборудование и базовую машину. Технический результат – повышение производительности, снижение затрат энергии и повышение надежности рыхлителя.
Достижение поставленной цели и технического результата обеспечивается тем, что система управления углом резания рыхлителя, содержащая гидронасос, гидробак, гидроцилиндр изменения угла резания, штоковая полость которого сообщена с гидроаккумулятором, гидрораспределитель с электромагнитным управлением, соединенный с блоком управления, снабжена датчиками скорости теоретической и скорости действительной, гидропневматическим демпфером, регулируемым редукционным гидроклапаном, регулируемым гидродросселем, обратным гидроклапаном и электропереключателем, при этом датчики теоретической и действительной скорости соединены электролиниями с блоком управления и гидропневматический демпфер сообщен, через регулируемый гидродроссель и параллельно включенный обратный гидроклапан, с поршневой полостью гидроцилиндра изменения угла резания, а регулируемый редукционный гидроклапан соединен с гидроаккумулятором выходом и с напорной гидролинией входом, причем электропереключатель соединен с электромагнитами гидрораспределителя.
Предлагаемая система управления, в сравнении с прототипом, обеспечивает автоматическое и ручное регулирование угла резания рыхлителя в зависимости от величины реальной внешней силы сопротивления, определяемой по буксованию движителей в изменяющихся грунтовых условиях. Одновременно гидропневматическим демпфером снижаются динамические нагрузки, действующие на рабочее оборудование и базовую машину.
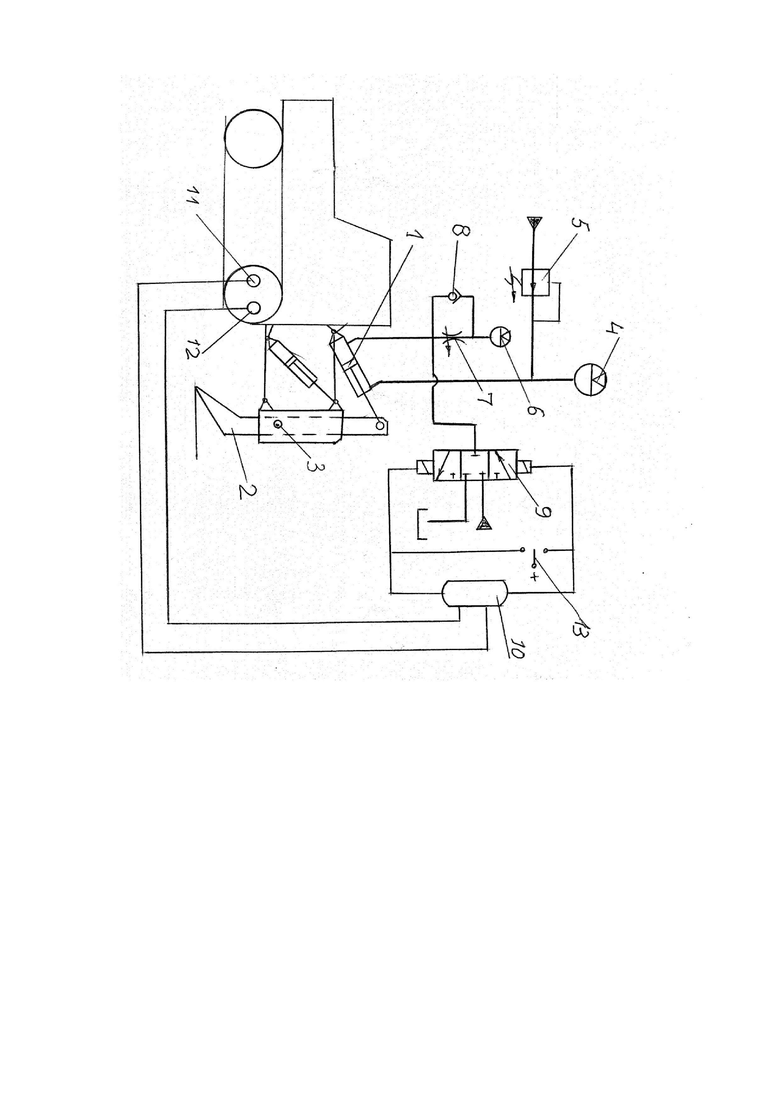
На чертеже изображена система управления углом резания рыхлителя и сам рыхлитель.
Система управления углом резания рыхлителя содержит гидроцилиндр 1 регулирования угла резания, соединенный шарнирно с рыхлительным зубом 2 и с базовой машиной. Рыхлительный зуб 2 установлен на шарнире 3 в стойке. Штоковая полость гидроцилиндра 1 сообщена с гидроаккумулятором 4, соединенным с напорной гидролинией, через регулируемый редукционный гидроклапан 5. Поршневая полость гидроцилиндра 1 сообщена гидролиниями с гидропневматическим демпфером 6, через регулируемый гидродроссель 7 и обратный гидроклапан 8, а также сообщена с управляемым гидрораспределителем 9, который сообщен с напорной и сливной гидролиниями. Электромагниты управления гидрораспределителя 9 соединены электролиниями с блоком управления 10, соединенным с датчиками 11 и 12. Датчик 11 измеряет угловую скорость ведущей звездочки ходового оборудования, преобразует информацию в величину теоретической скорости базовой машины в виде электрического сигнала. Датчик 12 измеряет действительную скорость базовой машины уже с учетом буксования и также преобразует измеряемый параметр в электрический сигнал. В цепь управления электромагнитами гидрораспределителя 9 включен электропереключатель 13 для включения ручного или автоматического режима управления углом резания рыхлителя.
Система управления углом резания рыхлителя действует следующим образом.
В рабочем положении рыхлителя, изображенном на чертеже, гидроаккумулятор 4 заряжен на заданную редукционным гидроклапаном 5 величину давления. Золотник гидрораспределителя 9 занимает нейтральную позицию и сохраняет сообщение поршневой полости гидроцилиндра 1 с демпфером 6. В процессе рыхления грунта происходят периодические его сколы, и эти повторяющиеся переменные по величине силовые воздействия на зуб рыхлителя передаются на шток гидроцилиндра 1. С возрастанием указанной внешней силы шток с поршнем перемещаются и вытесняют рабочую жидкость через регулируемый гидродроссель 7 в демпфер 6. Объем газовой полости демпфера выполнен небольшим и допускает малое угловое перемещение рыхлительного зуба. После скола грунта внешняя нагрузка снижается, и зуб быстро возвращается в исходное положение под действием давления рабочей жидкости, вытесняемой из демпфера 6, через обратный гидроклапан 8 и гидродроссель 7, в поршневую полость. Указанные периодические угловые перемещения рыхлительного зуба на шарнире 3 носят характер колебательных движений с небольшой амплитудой, не оказывающей существенного влияния на величину угла резания. Вместе с тем это обеспечивает, во-первых, снижение внешних динамических нагрузок на рабочее оборудование и базовую машину и, во-вторых, возникающие колебательные движения зуба облегчают рыхление грунта, что снижает затраты энергии на выполнение рабочего процесса.
Описанные явления происходят в случае, когда соотношение внешней нагрузки и тягово-сцепных свойств обеспечивает равномерное движение рыхлителя с минимальным буксованием движителей не более 5-7%. Однако в реальных условиях работы рыхлителя эти параметры обычно переменные. Рассмотрим действие системы управления в изменяющихся условиях. Пусть, например, на участке оказался грунт повышенной прочности или ухудшились сцепные свойства движителей с опорной поверхностью. В этом случае действительная скорость, измеряемая датчиком 12, уменьшилась в сравнении с теоретической скоростью, измеряемой датчиком 11. Если это изменение скорости превышает установленную блоком управления 10 величину, то включается соответствующий электромагнит гидрораспределителя 9, золотник которого соединит поршневую полость гидроцилиндра 1 с напорной гидролинией, что обеспечивает поворот рыхлительного зуба на шарнире 3 в сторону уменьшения угла резания до момента восстановления заданного соотношения действительной и теоретической скоростей рыхлителя. Золотник гидрораспределителя 9 возвращается в нейтральную позицию.
При уменьшении величины внешнего силового воздействия на зуб или улучшении сцепных свойств движителей с опорной поверхностью, величина действительной скорости увеличивается и приближается к величине теоретической скорости. Тогда блок управления 10 переключает золотник гидрораспределителя 9, и он сообщает поршневую полость гидроцилиндра 1 с гидробаком, уменьшая тем самым давление рабочей жидкости до исходного значения. Гидроцилиндр 1 перемещает рыхлительный зуб, относительно шарнира 3, в сторону увеличения угла резания. Золотник гидрораспределителя 9 возвращается в нейтральную позицию. Электропереключатель 13 позволяет использовать систему управления углом резания рыхлителя в автоматическом и ручном режимах.
Таким образом, предлагаемая система управления углом резания рыхлителя в сравнении с прототипом обеспечивает автоматическое управление углом резания в реальных условиях в зависимости от соотношения действительной и теоретической скоростей при любых прочностных и сцепных свойствах разрабатываемого грунта. Это уменьшает буксование движителей, повышает скорость движения базовой машины и соответственно производительность, а также снижает затраты энергии на буксование. Одновременно повышается надежность рыхлителя за счет снижения внешних динамических нагрузок, действующих на рабочее оборудование и базовую машину.
| название | год | авторы | номер документа |
|---|---|---|---|
| Рыхлитель | 2021 |
|
RU2775632C1 |
| КАНАЛОКОПАТЕЛЬ | 2020 |
|
RU2756995C1 |
| СИСТЕМА УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ ЗЕМЛЕРОЙНОЙ МАШИНЫ | 2024 |
|
RU2834360C1 |
| ГИДРОПРИВОД ЗЕМЛЕРОЙНОЙ МАШИНЫ НЕПРЕРЫВНОГО ДЕЙСТВИЯ | 2019 |
|
RU2719295C1 |
| Гидропривод стрелы погрузчика | 2021 |
|
RU2769209C1 |
| Гидропривод рабочего оборудования строительной машины | 2021 |
|
RU2775631C1 |
| МАШИНА ДЛЯ РАЗРАБОТКИ ГОРНЫХ ПОРОД | 2019 |
|
RU2729656C1 |
| Гидропривод стрелового рабочего оборудования землеройной машины | 2022 |
|
RU2806779C2 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ РЫХЛИТЕЛЯ | 2020 |
|
RU2760660C1 |
| Система управления догружающего устройства скрепера | 2021 |
|
RU2761274C1 |
Изобретение относится к землеройной технике, например к рыхлителям, и в частности к системам управления рыхлителей. Технический результат – повышение производительности, надежности и снижение затрат энергии. Система управления углом резания рыхлителя содержит гидронасос, гидробак, гидроцилиндр изменения угла резания, штоковая полость которого сообщена с гидроаккумулятором, гидрораспределитель с электромагнитным управлением, соединенный с блоком управления. Система снабжена датчиками скорости теоретической и скорости действительной, гидропневматическим демпфером, регулируемым редукционным гидроклапаном, регулируемым гидродросселем, обратным гидроклапаном и электропереключателем. Датчики теоретической и действительной скорости соединены электролиниями с блоком управления. Гидропневматический демпфер сообщен через регулируемый гидродроссель и параллельно включенный обратный гидроклапан с поршневой полостью гидроцилиндра изменения угла резания. А регулируемый редукционный гидроклапан соединен с гидроаккумулятором выходом и с напорной гидролинией входом. Причем электропереключатель соединен с электромагнитами гидрораспределителя. 1 ил.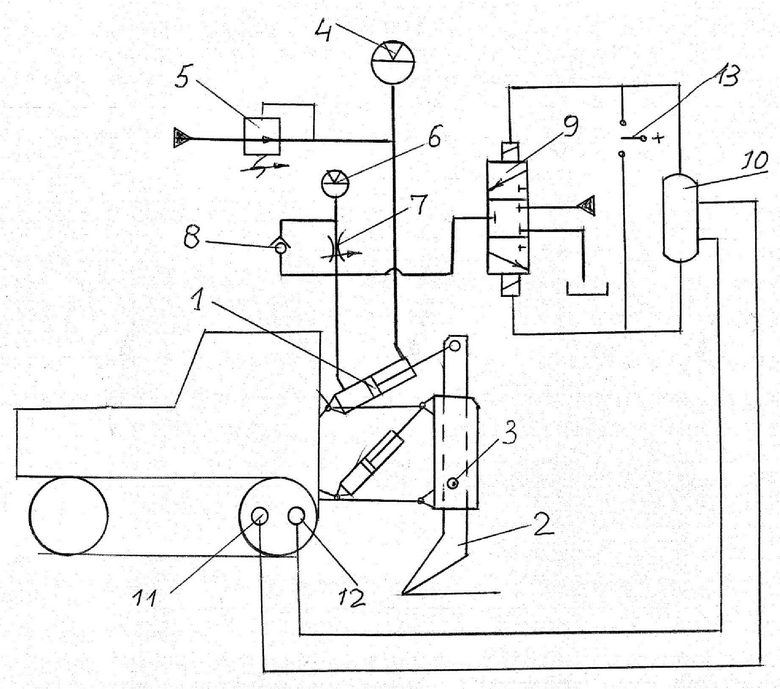
Система управления углом резания рыхлителя, содержащая гидронасос, гидробак, гидроцилиндр изменения угла резания, штоковая полость которого сообщена с гидроаккумулятором, гидрораспределитель с электромагнитным управлением, соединенный с блоком управления, отличающаяся тем, что она снабжена датчиками скорости теоретической и скорости действительной, гидропневматическим демпфером, регулируемым редукционным гидроклапаном, регулируемым гидродросселем, обратным гидроклапаном и электропереключателем, при этом датчики теоретической и действительной скорости соединены электролиниями с блоком управления, и гидропневматический демпфер сообщен через регулируемый гидродроссель и параллельно включенный обратный гидроклапан с поршневой полостью гидроцилиндра изменения угла резания, а регулируемый редукционный гидроклапан соединен с гидроаккумулятором выходом и с напорной гидролинией входом, причем электропереключатель соединен с электромагнитами гидрораспределителя.
| Автоматическая система управления углом резания рыхлителя | 2016 |
|
RU2634441C1 |
| SU 757467 A1, 23.08.1980 | |||
| Рыхлительная машина | 1988 |
|
SU1564291A1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ РЫХЛИТЕЛЯ | 2020 |
|
RU2760660C1 |
| Рыхлитель | 2021 |
|
RU2775632C1 |
| US 10066370 B2, 04.09.2018 | |||
| JPH 04277229 A, 02.10.1992. | |||

