Изобретение относится к землеройной технике, более конкретно к устройствам для прокладывания и ремонта каналов при выполнении мелиоративных работ.
Известен рабочий орган землеройно-фрезерной машины, включающий вал с приводом вращения, установленные на нем полые держатели с режущими ножами на концах, в полостях которых размещены подвижные в радиальном направлении грузы (SU1696743, E02 F5/08, 1991). Недостаток известного рабочего органа заключается в том, что подвижные грузы, установленные в полых держателях, соединены с ними пружинами, упругие свойства которых и, соответственно, величину момента инерции рабочего органа задавать и регулировать невозможно. Это снижает эксплуатационные возможности известного рабочего органа при разработке грунтов, имеющих большое разнообразие физико-механических свойств.
Наиболее близким по технической сущности к предлагаемому изобретению и, принятый заявителем в качестве прототипа, является рабочий орган землеройной машины, включающий вал с приводом вращения, установленные на нем полые держатели с режущими ножами на концах, в полостях которых размещены подвижные в радиальном направлении грузы, соединенные со штоками гидроцилиндров, прикрепленных к стенкам держателей, (RU2130529, E02 F5/08, 1999). Во втором известном рабочем органе подвижные грузы, установленные в полостях держателей, соединены со штоками гидроцилиндров и их положение можно регулировать и задавать, однако в ручном режиме, путем управляющих воздействий машиниста, что усложняет управление рабочим процессом. Машинист при управлении рабочим процессом должен, кроме того, одновременно управлять направлением движения базовой машины по курсу, ее скоростью и скоростью вращения рабочего органа, что приводит к его утомлению и снижению производительности. Кроме того, в процессе разработки участков грунтов, имеющих повышенную прочность, возникает перегрузка рабочего органа и ходового оборудования базовой машины, увеличивается буксование движителей и расход энергии, снижается скорость движения и соответственно производительности.
Целью предлагаемого изобретения является устранение или уменьшение недостатков известных технических решений. Техническая задача, решаемая предлагаемым изобретением, заключается в автоматизации регулирования положения подвижных грузов в держателях при выполнении рабочего процесса и в автоматическом регулировании скорости базовой машины в зависимости от величины загрузки рабочего органа. Технический результат – упрощение управления рабочим процессом, снижение энергозатрат и повышение производительности.
Достижение поставленной цели и получение технического результата обеспечивается тем, что система управления рабочим органом землеройной машины, включающая вал с приводом вращения, установленные на нем полые держатели с режущими ножами на концах, в полостях которых размещены подвижные в радиальном направлении грузы, соединенные со штоками гидроцилиндров, прикрепленных к стенкам держателей, снабжена гидроаккумулятором, регулируемым редукционным гидроклапаном, регулируемым гидродросселем, манометром, гидродвигателем привода рабочего органа и гидрораспределителем.
Гидрораспределитель выполнен четырехпозиционным, с возможностью сообщения поршневых полостей гидроцилиндров с напорной гидролинией гидродвигателя привода вращения рабочего органа, в одной из позиций золотника и с возможностью дополнительного сообщения, через регулируемый гидродроссель, с органом управления гидродвигателя привода ходового оборудования базовой машины, в другой позиции золотника, при этом штоковые полости гидроцилиндров сообщены с манометром и с гидроаккумулятором, который сообщен с напорной гидролинией через регулируемый редукционный гидроклапан и со сливной гидролинией через вентиль.
Предлагаемый рабочий орган землеройной машины отличается от прототипа тем, что упругие свойства связей поршней гидроцилиндров с корпусами задаются путем настройки давления рабочей жидкости в гидроаккумуляторе и затем автоматически регулируются в соответствии с изменяющимися физико-механическими свойствами разрабатываемого грунта. Скорость базовой машины также автоматически регулируется и ограничивается при перегрузке рабочего органа.
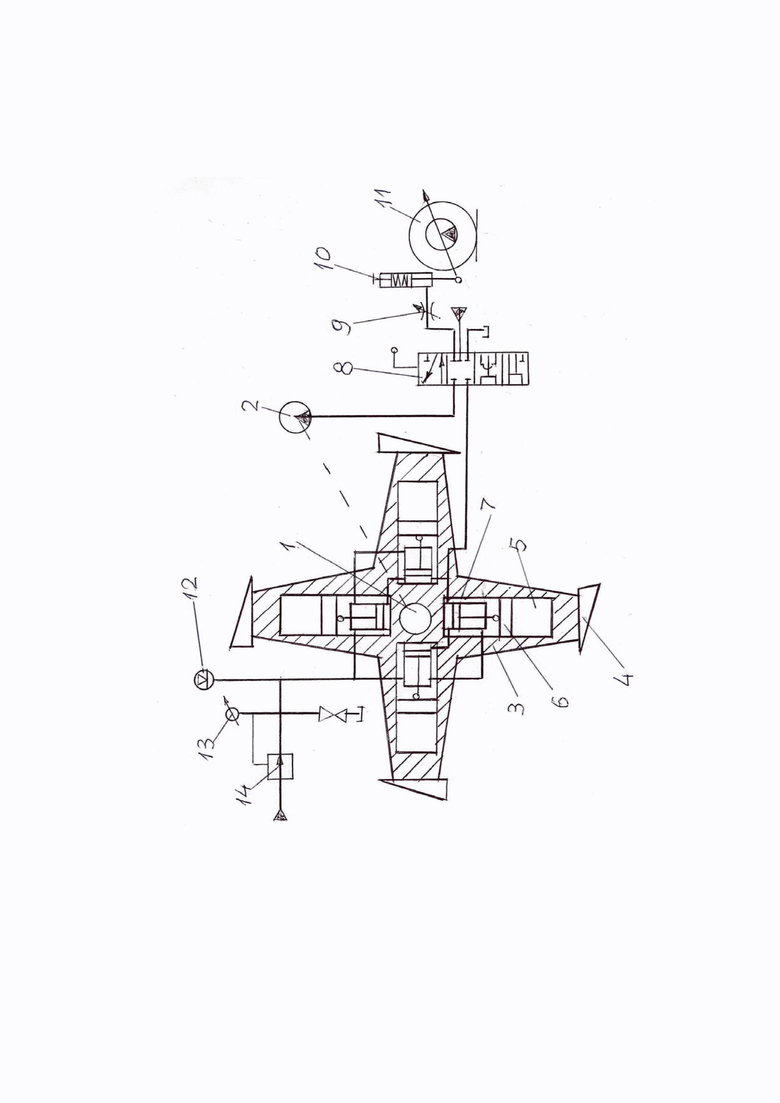
На чертеже изображена система управления рабочим органом землеройной машины.
Система управления рабочим органом землеройной машины включает вал 1 с приводом 2. На валу закреплены полые держатели 3 с режущими ножами 4 на концах. В полостях 5 держателей размещены подвижные в радиальном направлении грузы 6, соединенные со штоками гидроцилиндров 7, прикрепленных корпусами к стенкам держателей. Поршневые полости гидроцилиндров 7 сообщены гидролиниями с четырехдиапазонным гидрораспределителем 8, который сообщен с напорной и сливной гидролиниями, с напорной гидролинией гидродвигателя 2, привода рабочего органа, а также сообщен через регулируемый гидродроссель 9 с органом управления 10 гидродвигателя 11 привода ходового оборудования базовой машины. Гидрораспределитель 8 выполнен с возможностью сообщения поршневых полостей гидроцилиндров 7 с напорной гидролинией гидродвигателя 2 привода вращения рабочего органа, в одной из позиций золотника и дополнительного сообщения с органом управления 10 гидродвигателя 11 привода ходового оборудования базовой машины, в другой позиции золотника. Штоковые полости гидроцилиндров 7 сообщены гидролиниями с гидроаккумулятором 12, с манометром 13 и, через регулируемый редукционный гидроклапан 14, сообщены с напорной гидролинией.
Система управления рабочим органом землеройной машины действует следующим образом.
В исходном положении двигатель базовой машины выключен, давление рабочей жидкости в гидросистеме отсутствует, гидроаккумулятор 12 разряжен и грузы 6 занимают в полостях 5 держателей 3 неопределенные положения. При запуске двигателя базовой машины появляется давление рабочей жидкости в напорной гидролинии и регулируемый редукционный гидроклапан 14 устанавливает заданную величину зарядки гидроаккумулятора 12. Грузы 6 под действием давления рабочей жидкости из гидроаккумулятора 12 подтягиваются гидроцилиндрами 7 к валу 1, обеспечивая минимальный момент инерции, что облегчает его раскручивание. Гидродвигатель 2 привода вращения рабочего органа включается путем подъема золотника гидрораспределителя 8 на одну позицию от нейтральной, в которой гидродвигатель и поршневые полости гидроцилиндров 7 сообщаются с напорной гидролинией. При холостом вращении рабочего органа давление рабочей жидкости в напорной гидролинии гидродвигателя и в поршневых полостях имеет малую величину и его недостаточно для выдвижения штоков с грузами 6, и они остаются в подтянутом к валу положении. С началом взаимодействия рабочего органа с разрабатываемым грунтом увеличивается величина сопротивления вращению рабочего органа и величина давления рабочей жидкости в напорной гидролинии гидродвигателя 2, а также в сообщенных с ней поршневых полостях гидроцилиндров 7. Поэтому поршни и штоки вместе с грузами 6 перемещаются от вала 1, увеличивая момент инерции рабочего органа и величину кинетической энергии взаимодействия режущих ножей 4 с разрабатываемым грунтом. Величина этого перемещения и величина момента инерции зависят от степени загрузки рабочего органа, и такая зависимость поддерживается автоматически при выполнении рабочего процесса.
В случае разработки грунтов, имеющих высокую прочность, используется второй режим работы, для осуществления которого золотник гидрораспределителя 8 поднимается на вторую позицию от нейтральной. В указанной позиции поршневые полости гидроцилиндров 7 сообщаются не только с гидродвигателем 2 и с напорной гидролинией, но и через регулируемый гидродроссель 9, с регулирующим органом управления 10 гидродвигателя 11 привода ходового оборудования базовой машины. При разработке участков грунта, имеющих высокую прочность, возрастающее давление рабочей жидкости в напорной гидролинии гидродвигателя 2 воздействует через регулируемый гидродроссель 9 на орган управления 10 гидродвигателя привода ходового оборудования, осуществляя уменьшение скорости базовой машины. Это обеспечивает предохранение от перегрузки рабочий орган, элементы трансмиссии и ходового оборудования, а также снижает возможность буксования движителей и возможность повышенных затрат энергии при буксовании. Кроме того, уменьшение буксования движителей сокращает длительность выполнения работы и повышает производительность. Регулируемый гидродроссель 9 выполняет функции фильтра и предохраняет орган управления 10 гидродвигателя привода ходового оборудования 11 от возможных скачков давления рабочей жидкости, возникающих, например, при переключении золотника гидрораспределителя или других случайных воздействий.
Кроме приведенных выше автоматических режимов управления величиной момента инерции рабочего органа, возможно осуществлять и ручной режим управления. Для его использования в гидроаккумуляторе 12 устанавливается, с помощью редукционного гидроклапана 14 и манометра 13, необходимая величина зарядки и золотник гидрораспределителя 8 перемещается вниз в позицию, в которой поршневые полости гидроцилиндров 7 сообщаются со сливнй гидролинией, а гидродвигатель 2 привода рабочего органа с напорной гидролинией.
Таким образом, предлагаемая система управления рабочим органом землеройной машины, в сравнении с прототипом, обеспечивает автоматическое регулирование величины момента инерции рабочего органа и соответственно величины кинетической энергии воздействия режущих ножей на разрабатываемый грунт, путем перемещения грузов, в зависимости от текущего значения величины сопротивления резанию грунта в широком многообразии физико-механических его свойств. Это существенно облегчает управление рабочим процессом и способствует повышению производительности. Кроме того, скорость перемещения базовой машины при выполнении рабочего процесса также автоматически регулируется в зависимости от величины сопротивления резанию грунта, что предотвращает перегрузку рабочего органа, элементов трансмиссии и ходового оборудования, повышая их надежность. Одновременно предотвращается буксование движителей и связанные с ним бесполезные затраты энергии. Сокращается время выполнения работы и повышается производительность.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРОПРИВОД ЗЕМЛЕРОЙНОЙ МАШИНЫ НЕПРЕРЫВНОГО ДЕЙСТВИЯ | 2019 |
|
RU2719295C1 |
| ЭКСКАВАТОР ДЛЯ ВСКРЫТИЯ ТРУБОПРОВОДОВ | 2019 |
|
RU2729632C1 |
| Система управления углом резания рыхлителя | 2023 |
|
RU2828248C1 |
| РАБОЧЕЕ БУЛЬДОЗЕРНОЕ ОБОРУДОВАНИЕ | 2019 |
|
RU2712829C1 |
| СКРЕПЕР С ГАЗОВОЙ СМАЗКОЙ КОВША | 2018 |
|
RU2709572C1 |
| Гидропривод землеройной машины | 2022 |
|
RU2795877C1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ БУЛЬДОЗЕРА | 2019 |
|
RU2712835C1 |
| Гидропривод стрелового рабочего оборудования землеройной машины | 2022 |
|
RU2806779C2 |
| Система управления догружающего устройства скрепера | 2021 |
|
RU2761274C1 |
| Землеройно-транспортная машина | 2023 |
|
RU2828672C1 |
Изобретение относится к землеройной технике, а именно - к системам управления рабочим органом землеройной машины для прокладывания и ремонта каналов при выполнении мелиоративных работ. Система управления рабочим органом землеройной машины содержит привод вала рабочего органа, выполненного в виде гидродвигателя (2), гидроаккумулятор, регулируемый редукционный гидроклапан, регулируемый гидродроссель, манометр и гидрораспределитель, который выполнен четырехпозиционным с возможностью сообщения поршневых полостей гидроцилиндров с напорной гидролинией в одной из позиций золотника и с возможностью дополнительного сообщения поршневых полостей через регулируемый гидродроссель с органом управления гидродвигателя привода ходового оборудования базовой машины в другой позиции золотника, при этом штоковые полости гидроцилиндров сообщены с манометром и с гидроаккумулятором, сообщенным с напорной гидролинией через регулируемый редукционный гидроклапан и со сливной гидролинией через вентиль. При увеличении сопротивления резанию грунта и соответственно давления рабочей жидкости на входе гидродвигателя (2) привода рабочего органа и в сообщенных с ним поршневых полостях поршни выдвигают грузы (6), увеличивая момент инерции рабочего органа и кинетическую энергию воздействия ножей на грунт. Технический результат – упрощение управления рабочим процессом, снижение энергозатрат и повышение производительности землеройной машины. 1 ил.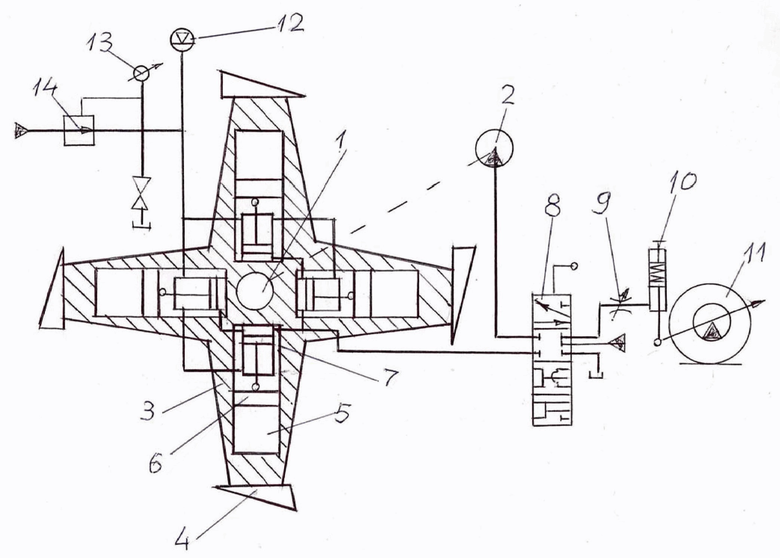
Система управления рабочим органом землеройной машины, включающая вал, установленные на нем полые держатели с режущими ножами на концах, в полостях которых размещены подвижные в радиальном направлении грузы, соединенные со штоками гидроцилиндров, прикрепленных к стенкам держателей, отличающаяся тем, что она содержит привод вала рабочего органа, выполненного в виде гидродвигателя, гидроаккумулятор, регулируемый редукционный гидроклапан, регулируемый гидродроссель, манометр и гидрораспределитель, который выполнен четырехпозиционным с возможностью сообщения поршневых полостей гидроцилиндров с напорной гидролинией в одной из позиций золотника и с возможностью дополнительного сообщения поршневых полостей через регулируемый гидродроссель с органом управления гидродвигателя привода ходового оборудования базовой машины в другой позиции золотника, при этом штоковые полости гидроцилиндров сообщены с манометром и с гидроаккумулятором, сообщенным с напорной гидролинией через регулируемый редукционный гидроклапан и со сливной гидролинией через вентиль.
| РАБОЧИЙ ОРГАН ЗЕМЛЕРОЙНОЙ МАШИНЫ | 1997 |
|
RU2130529C1 |
| Фреза рабочего органа траншейно-котлованной машины | 1987 |
|
SU1469044A1 |
| SU 1484868 A1, 07.06.1989 | |||
| Рабочий орган землеройно-фрезерной машины | 1989 |
|
SU1696743A1 |
| US 3680919 A1, 01.08.1972 | |||
| CN 112761208 A, 07.05.2021. | |||

