Изобретение относится к нефтегазовой промышленности и может найти применение при строительстве и ремонте скважин для освобождения прихваченного в скважине оборудования (далее «объект») посредством ударов. Другими областями изобретения является бурение горизонтальных или близких к горизонтали участков ствола скважины, когда вследствие значительной силы трения между стенкой скважины и колонной бурильных труб процесс передачи осевой нагрузки на породоразрушающий инструмент затруднен.
Известно, что при работе ясса источником энергии для нанесения ударов вверх является упругая энергия растяжения рабочей колонны, расположенной выше ясса. Вместе с тем в неглубоких скважинах и в случае жесткой колонны величина упругой деформации рабочей колонны над яссом может оказаться меньше, чем длина свободного хода ясса вверх (участок разгона ясса на удар вверх). Это означает, что величины упругой деформации рабочей колонны над яссом может не хватить для нанесения эффективного удара по прихваченному объекту. С другой стороны, при работе с яссом в горизонтальных или близких к горизонтали участках скважин ускоренное движение рабочей колонны в момент удара затруднено вследствие значительных сил трения между рабочей колонной и стенкой скважины. Для повышения эффективности работы ясса в этих условиях разработаны специальные скважинные инструменты получившие названия – акселераторы, интенсификаторы и усилители удара ясса. Данный инструмент размещается над яссом, причем, как правило, между ним и яссом устанавливается утяжеленная бурильная труба или несколько труб (далее УБТ) как дополнительная сосредоточенная масса для увеличения силы удара. Данный инструмент содержит пружинный механизм (обычно в виде тарельчатых пружин), который позволяет накапливать значительную упругую энергию непосредственно над яссом дополнительно к энергии упругого растяжения всей рабочей колонны. Это позволяет не только увеличить суммарную величину упругой деформации рабочей колонны над яссом, но и локализовать один из источников упругой энергии непосредственно над яссом, и как следствие этого организовать в большей степени местное, локальное ускоренное движение участка рабочей колонны и УБТ непосредственно над яссом, минимизируя вредное влияние сил трения на работу ясса в горизонтальных или близких к горизонтали участках скважины. Заметим, что применение подобных устройств позволяет значительно повысить эффективность работы ясса и в обычных вертикальных скважинах.
Например, известен буровой акселератор для усиления удара бурильного ясса (патент RU 2571961 С1), включающий корпус с направляющей и переводником, шпиндель размещенный внутри корпуса и взаимодействующий с корпусом и направляющей посредством шлицевой пары, шток, соосно и подвижно размешенный в корпусе и жестко связанный со шпинделем и пружинный механизм в виде тарельчатых пружин, размещенных соосно в корпусе.
Недостатком данного устройства является его недостаточная эффективность при незначительных величинах упругой деформации рабочей колонны над яссом (при работе на небольших глубинах и с жесткой колонной). Например, в процессе нанесения ударов вверх, в случае приложения к рабочей колонне небольших растягивающих нагрузок может сложиться такая ситуация, при которой ход шпинделя акселератора (ход акселератора), определяемый деформацией сжатия тарельчатых пружин, может оказаться меньше свободного хода ясса при ударе вверх (участок разгона ясса при ударе вверх). Рассмотрим этот вопрос более подробно. Предположим, что в скважине на небольшой глубине произошел прихват, например, компоновки низа бурильной колонны (далее КНБК). Предположим, что выше КНБК был установлен ясс, например, гидравлического типа, выше ясса установлен акселератор, между ними размещена одна или несколько УБТ. Предположим, что в начальный момент отбивки прихваченного КНБК мы прикладываем незначительные растягивающие нагрузки на ясс (например, 10 - 15 тонн), составляющие лишь небольшую часть максимально допустимой нагрузки на пружинный механизм акселератора. Очевидно, что в этом случае шпиндель акселератора выйдет из корпуса, сжимая пружинный механизм на значительно меньшее расстояние, чем максимально конструктивно возможное при максимальной растягивающей нагрузке. Т.е. ход акселератора зависит от величины приложенной растягивающей нагрузки, и он может изменяться. Однако, в отличие от акселератора, свободный ход ясса вверх не определяется величиной нагрузки, он всегда постоянен, что обусловлено его конструкцией. Значит, при отбивке яссом прихваченного объекта на небольшой глубине на колонне значительной жесткости и при приложении незначительных растягивающих нагрузок на ясс может сложиться ситуация, при которой сумма величины упругого растяжения рабочей колонны над акселератором и длины хода расцепленного акселератора при данной нагрузке может оказаться меньше, чем свободный ход ясса вверх. Как результат, после расцепления ясса реализация энергии удара движущейся массы в большей степени будет не в самом яссе, а в упорных поверхностях акселератора, что снижает вероятность извлечения прихваченного объекта. Таким образом очевидно, что для эффективной отбивки прихваченного объекта длина хода акселератора должна несколько превышать длину свободного хода ясса вверх при различных возможных сочетаниях растягивающих нагрузок, прикладываемых к яссу в различных скважинных условиях. Именно подобный подход реализован в следующем техническом решении, выбранном нами в качестве прототипа.
Известен акселератор ясса (Jar accelerator, US Patent, 4,844,157), содержащий шпиндель, связанный с рабочей колонной труб, направляющую, взаимодействующую со шпинделем посредством шлицевой пары, корпус и нижний переводник, жестко связанные c направляющей и между собой, шток, соосно и подвижно размешенный в корпусе и жестко связанный со шпинделем посредством бойка, тарельчатые пружины, размещенные соосно в корпусе, упор, выполненный на штоке и герметизированную масляную камеру с поплавком, выполненную в корпусе.
В данной конструкции акселератора применяются два комплекта тарельчатых пружин разной жесткости, позволяющие получить длину хода расцепленного акселератора близкой или превышающей длину свободного хода ясса вверх в широком диапазоне растягивающих нагрузок, прикладываемых к яссу. Подобное техническое решение позволяет увеличить эффективность работы акселератора, так как упругая энергия, аккумулируемая акселератором будет реализована в виде энергии удара в яссе, а не в акселераторе. Однако данная конструкция акселератора обладает следующими недостатками. Конструктивно шпиндель и шток акселератора подпружинены, т.е. имеют постоянный непрерывный контакт с тарельчатыми пружинами через соответствующие упорные поверхности, причем как в начале хода акселератора, так и в его конце. В результате после нанесения яссом удара, продольная волна возмущения, возникающая в момент удара бойка о соответствующую ударную поверхность ясса, имеет возможность перехода на рабочую колонну труб, расположенную выше акселератора, и далее на поверхностное оборудование по следующей схеме «боек ясса – шпиндель ясса – корпус акселератора – его поджатые тарельчатые пружины – упор штока акселератора – шток акселератора – переводник штока акселератора – шпиндель акселератора» и далее на рабочую колонну. Учитывая, что энергия удара при работе ясса огромная, а в процессе ликвидации прихвата зачастую приходится наносить по прихваченному объекту сотни ударов, данное обстоятельство может вызвать повреждение не только самой рабочей колонны, но и дорогостоящего верхнего привода.
С другой стороны, известно, что в процессе бурения горизонтальных или близких к горизонтали участков скважин, существует проблема доведения осевой нагрузки на долото вследствие значительных сил трения между рабочей колонной труб с КНБК и стенкой скважины. Как результат, вследствие разности величин коэффициентов трения покоя и движения, заглубление КНБК и рабочей колонны в процессе бурения подобных скважин осуществляется неравномерно, рывками, что является дополнительным источником ударных нагрузок не только на дорогостоящие элементы КНБК, такие как забойный двигатель, электронные компоненты роторно-управляемых систем (РУС) и телесистем, но также и на рабочую колонну, а через нее и на дорогостоящее поверхностное оборудование, снижающим их ресурс. Конструкция прототипа не позволяет снизить вредное влияние данного явления на КНБК, рабочую колонну и поверхностное оборудование и обеспечить более равномерное нагружение долота осевой нагрузкой в процессе бурения.
Целью изобретения является расширение функциональных возможностей акселератора ясса.
Поставленная цель достигается за счет того, что акселератор гидравлического ясса содержит шпиндель, связанный с рабочей колонной труб и направляющей, взаимодействующей со шпинделем посредством шлицевого соединения, корпус и нижний переводник, жестко связанные с направляющей и между собой, полый шток, жестко и соосно связанный со шпинделем посредством переводника шпинделя и размещенный коаксиально относительно корпуса, тарельчатые пружины сжатия, размещенные соосно в корпусе, упор, выполненный на полом штоке, и герметизированную масляную камеру с поплавком, выполненную в корпусе, согласно изобретению, в нижней части корпуса коаксиально размещена неподвижная цилиндрическая втулка, жестко связанная с корпусом, образуя с полым штоком внутреннюю кольцевую полость, внутри которой соосно установлена подвижная втулка с возможностью осевого перемещения, которая содержит выступ, выполненный для взаимодействия с верхним торцом неподвижной цилиндрической втулки и тарельчатыми пружинами сжатия, в сомкнутом состоянии акселератора, обеспечивающем передачу сжимающей нагрузки на гидравлический ясс через шпиндель к направляющей через шлицевое соединение, расстояние между упором полого штока и нижней поверхностью подвижной втулки представляет собой свободный неподпружиненный ход акселератора, максимальный ход акселератора соответствует выдвижению шпинделя относительно направляющей на максимально возможное расстояние, ограниченное ходом переводника шпинделя внутри направляющей, при этом длина свободного неподпружиненного хода акселератора составляет не менее половины длины свободного хода гидравлического ясса, а длина максимального хода акселератора превышает длину свободного хода гидравлического ясса при ударе вверх.
По вопросу соответствия отличий предлагаемого технического решения критерию «изобретательский уровень» можем сообщить следующее.
Известно широкое применение тарельчатых пружин сжатия, взаимодействующих с подвижным шпинделем относительно корпуса, не только в акселераторах, но и в других устройствах для уменьшения ударной нагрузки на долото и снижения вредного влияния вибрации, возникающей в процессе бурения на внутрискважинное и поверхностное оборудование (например, патент RU 2467150). Однако, выполнение в предлагаемом техническом решении свободного неподпружиненного хода шпинделя позволяет избежать возможности передачи продольной волны возмущения, обусловленной работой ясса, при ликвидации прихвата далее на рабочую колонну и поверхностное оборудование и вызвать их повреждение при работе с акселератором в различных скважинных условиях и в широком диапазоне прилагаемых растягивающих нагрузок. Вместе с тем, выполнение свободного неподпружиненного хода шпинделя заявляемого технического решения позволит так же снизить отрицательное влияние ударных нагрузок на скважинное и поверхностное оборудование, обусловленных неравномерным скачкообразным заглублением рабочей колонны, а также обеспечить более равномерное нагружение долота осевой нагрузкой в процессе бурения горизонтальных или близких к горизонтали скважин. Учитывая вышеописанное, совокупность отличительных признаков заявляемого изобретения позволяет получить новый технический результат, выражающийся в виде расширения функциональных возможностей акселератора, следовательно, заявляемое техническое решение по нашему мнению отвечает критерию «изобретательский уровень».
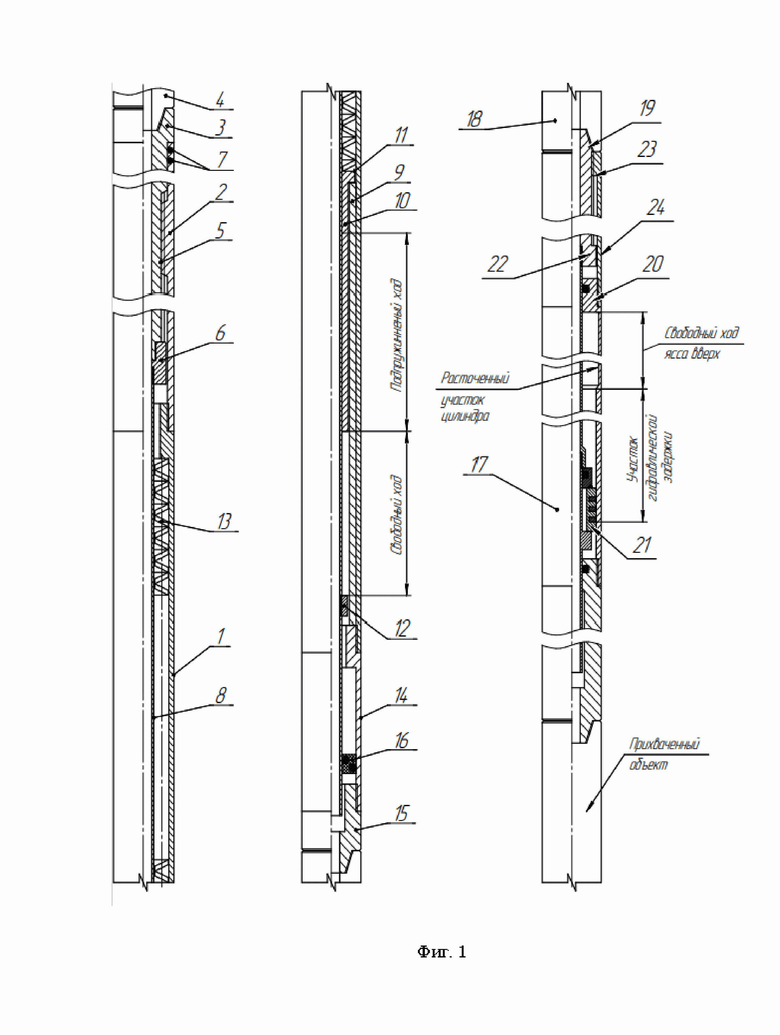
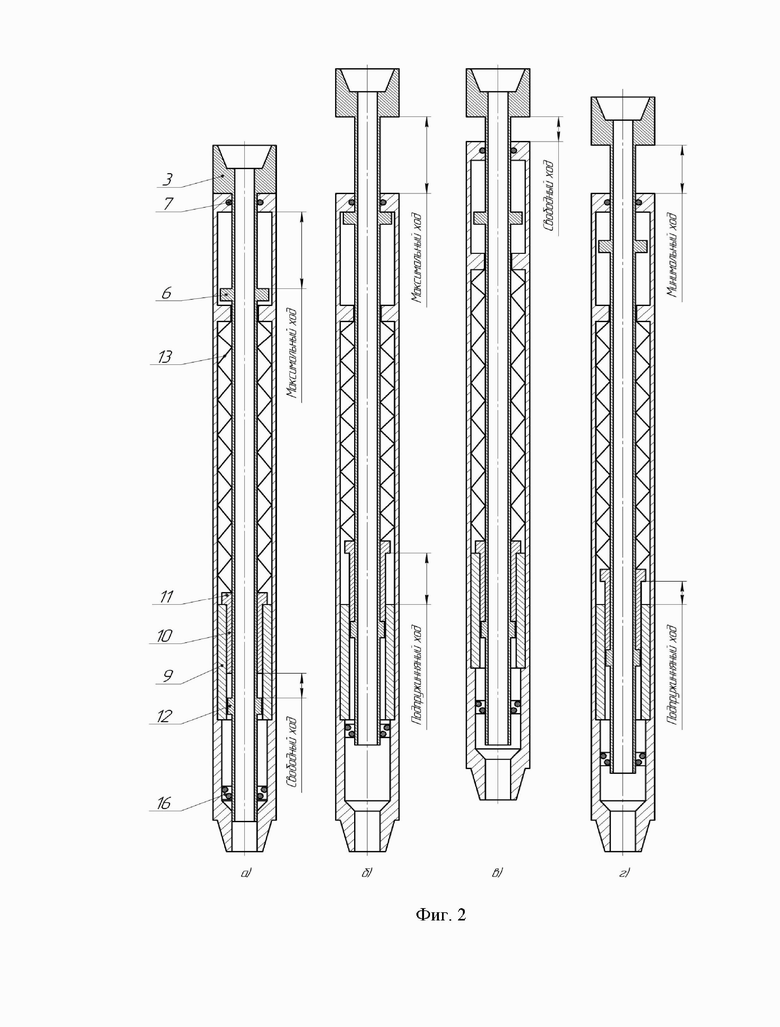
На фиг. 1 изображен продольный разрез акселератора гидравлического ясса, расположение элементов соответствует сомкнутому положению акселератора. Для более наглядного представления совместной работы предлагаемого технического решения и гидравлического ясса в качестве примера выбран гидравлический ясс по патенту RU 2272122, свинченный с предлагаемым техническим решением через УБТ; на фиг. 2 показана схема работы акселератора ясса (без учета упругости рабочей колонны выше ясса), в сомкнутом положении (а), в полностью расцепленном положении (б), в положении после срабатывания гидравлического ясса - выбран подпружиненный ход акселератора, но не свободный ход (в), в расцепленном положении при минимальной нагрузке (г).
Устройство состоит из корпуса 1, который жестко связан с направляющей 2, внутри корпуса 1 размещен с возможностью осевого перемещения шпиндель 3, связанный с рабочей колонной труб 4. В свою очередь шпиндель 3 взаимодействует с направляющей 2 посредством шлицевого соединения 5 и жестко связан с переводником шпинделя 6, который ограничивает ход шпинделя 3 внутри направляющей 2. В верхней части внутренней цилиндрической поверхности направляющей 2 размещены уплотнительные элементы 7, обеспечивающие герметизацию между направляющей 2 и наружной цилиндрической поверхностью шпинделя 3. К нижней части шпинделя 3 посредством переводника шпинделя 6 жестко и соосно закреплен полый шток 8, размещенный коаксиально и с зазором относительно корпуса 1 и образующий с ним внутреннюю кольцевую полость корпуса 1. В нижней части кольцевой полости корпуса 1 жестко и коаксиально размещена неподвижная цилиндрическая втулка 9, образующая с полым штоком 8 внутреннюю кольцевую полость неподвижной втулки 9. В верхней части внутренней кольцевой полости неподвижной втулки 9 соосно и с возможностью осевого перемещения размещена подвижная втулка 10, причем в ее верхней части выполнен выступ 11, взаимодействующий в крайнем нижнем положении с верхним торцом неподвижной втулки 9, что ограничивает дальнейшее перемещение подвижной втулки 10 вниз. На штоке 8 выполнен упор 12, размещенный во внутренней кольцевой полости неподвижной втулки 9 под подвижной втулкой 10. В свою очередь выступ 11 подвижной втулки 10 подпружинен относительно корпуса 1 посредством набора тарельчатых пружин сжатия 13, размещенных во внутренней кольцевой полости корпуса 1. Расстояние между упором 12 и нижним торцом подвижной втулки 10 определяет свободный (неподпружиненный) ход акселератора. К нижней части корпуса 1 соосно и с кольцевым зазором относительно штока 8 жестко крепится корпус компенсатора 14 с нижним переводником 15, при этом корпус компенсатора 14 образует со штоком 8 внутреннюю кольцевую камеру корпуса компенсатора 14, изолированную от внутритрубной полости рабочей колонны посредством подвижного поплавка 16 для выравнивания давления. Таким образом, внутренняя полость устройства, ограниченная подвижным поплавком 16 и уплотнительными элементами 7 направляющей 2 является герметичной и сбалансированной по отношению к давлению внутри рабочей колонны и заполнена маловязким маслом. К нижнему переводнику 15 устройства крепится гидравлический ясс 17 посредством одной или нескольких УБТ 18.
Устройство работает следующим образом.
Устройство устанавливают в рабочую колонну труб над гидравлическим яссом, между ними для увеличения массы, движущейся с ускорением, размещают одну или несколько УБТ. Работу устройства рассмотрим в двух режимах, первый – совместная работа с гидравлическим яссом при освобождении прихваченного в скважине объекта (например, КНБК) ударами вверх и второй, – совместная работа с КНБК в процессе бурения.
Остановимся более подробно на совместной работе акселератора ясса с гидравлическим яссом при освобождении прихваченного в скважине объекта ударами вверх. Известно, что для нанесения удара вверх на гидравлический ясс предварительно необходимо приложить сжимающую нагрузку для его зарядки. Очевидно, что при этом акселератор и гидравлический ясс будут в сомкнутом положении, т.е. сжимающая нагрузка на гидравлический ясс передастся через шпиндель 3 к направляющей 2 через шлицевое соединение 5 (фиг.1, фиг.2, а). Далее рассмотрим вариант, когда для нанесения удара вверх на акселератор прикладывается максимально допустимая растягивающая нагрузка, под действием которой шпиндель 3 выдвинется относительно направляющей 2 на максимально возможное расстояние, ограниченное ходом переводника шпинделя 6 внутри направляющей 2 (максимальный ход акселератора, фиг.2, б). При этом растягивающая нагрузка будет передаваться на гидравлический ясс по следующей схеме: «шпиндель акселератора 3 – переводник шпинделя 6 - направляющая 2 – корпус акселератора 1 – корпус компенсатора 14 – нижний переводник 15 – УБТ 18 – шпиндель ясса 19». При этом упор 12 полого штока 8 акселератора выберет свободный ход и, сжимая набор тарельчатых пружин сжатия 13, выдвинет подвижную втулку 10 относительно неподвижной цилиндрической втулки 9 на максимально возможное расстояние (подпружиненный ход, фиг.2, б). Очевидно, что в этом случае акселератор ясса накопит максимальную энергию деформации сжатия. Под действием растягивающей нагрузки, переданной гидравлическому яссу, шпиндель гидравлического ясса 19 начнет медленно выдвигаться из его корпуса наружу вследствие перетока масла в гидроцилиндре ясса 20 через поршень ясса 21 в направлении сверху – вниз. Однако заметим, что при этом растягивающая нагрузка к акселератору прикладывается через рабочую колонну труб 4 с поверхности, а значит и сам протяженный участок рабочей колонны труб 4 над акселератором ясса будет так же упруго растянут, даже несмотря на то, что прихват может произойти на небольшой глубине, и рабочая колонна труб 4 может иметь высокую жесткость (будет показано на примере ниже).
По мере перетока масла в гидроцилиндре ясса 20 вся сборка, расположенная выше него - УБТ 18 и акселератор - будут так же медленно перемещаться вверх под действием упругой энергии растяжения рабочей колонны и упругой энергии сжатия тарельчатых пружин 13 акселератора. Принимая во внимание, что у современных гидравлических яссов участок гидравлической задержки (фиг.1) очень небольшой, это перемещение практически не повлияет на степень сжатия тарельчатых пружин 13 акселератора, так как данное перемещение будет компенсироваться уменьшением степени натяжения рабочей колонны 4 над акселератором ясса. После достижения поршнем ясса 21 расточенного участка цилиндра, длина которого определяет величину свободного хода ясса вверх (фиг.1), перепад давления на поршне ясса 21 резко снимается, и вся сборка «шпиндель ясса 19 – УБТ 18 – нижний переводник 15 – корпус компенсатора 14 – корпус акселератора 1 – направляющая 2» начинает резкое ускоренное движение вверх относительно шпинделя 3, переводника шпинделя 6 и полого штока акселератора 8 (фиг.2, б, в). Однако заметим, что хорошо известны и другие конструкции гидравлических яссов без расточенного участка цилиндра, однако эти конструктивные отличия не повлияют на принцип совместной работы предлагаемого устройства с гидравлическим яссом, так как у любого ясса присутствует участок его свободного хода для удара вверх. При этом, источником упругой энергии для разгона относительно шпинделя 3 всей конструкции, обладающей значительной массой, будет являться энергия деформации сжатия тарельчатых пружин 13 акселератора. Вместе с тем, сам шпиндель 3 акселератора вместе с переводником шпинделя 6 и полым штоком 8 так же одновременно ускоренно переместится вверх за счет упругой деформации рабочей колонны труб 4, расположенной выше акселератора. Заметим, что величина суммарного возможного перемещения всей сборки «шпиндель ясса 19 – УБТ 18 – нижний переводник 15 – корпус компенсатора 14 – корпус акселератора 1– направляющая 2» вверх определяется только величиной свободного хода гидравлического ясса вверх (фиг.1). В процессе ускоренного перемещения корпуса акселератора 1 с направляющей 2 относительно шпинделя 3 и полого штока акселератора 8, вначале выбирается его подпружиненный ход (фиг.2, б), а затем и свободный ход акселератора, при котором дальнейшее ускоренное движение всей сборки осуществляется свободно по инерции, без влияния тарельчатых пружин сжатия акселератора 13 (фиг.2, в). Т.е. на этом участке свободного хода акселератора прерывается механический контакт упора 12 полого штока 8 с тарельчатыми пружинами сжатия 13, а значит и со всей массивной движущейся с ускорением сборкой «шпиндель ясса 19 – УБТ 18 – нижний переводник 15 – корпус компенсатора 14 – корпус акселератора 1 – направляющая 2». Учитывая, что в предлагаемом техническом решении максимальный ход акселератора больше свободного хода ясса при ударе верх, вся кинетическая энергия ускоренного движения сборки поглотится в виде энергии удара бойка ясса 22 об его наковальню 23, расположенную в корпусе ясса 24 (фиг.1), и далее на прихваченный объект, а не шпинделем 3 и направляющей 2 акселератора. С другой стороны, принимая во внимание факт, что удар в яссе реализуется на участке свободного хода акселератора, возникающая при этом продольная волна возмущения не будет иметь возможности перехода через полый шток 8 и шпиндель 3 акселератора на рабочую колонну труб 4, расположенную выше акселератора ясса и далее на поверхностное оборудование.
Учитывая, что энергия удара при работе гидравлического ясса огромная, а в процессе ликвидации прихвата зачастую приходится наносить по прихваченному объекту сотни ударов, данная конструктивная особенность существенно уменьшит возможность повреждения не только самой рабочей колонны, но и дорогостоящего верхнего привода.
Рассмотрим далее работу устройства в случае, когда для нанесения удара вверх на акселератор прикладывается минимальная растягивающая нагрузка (например, 10 тонн для буровых яссов типоразмера 165-172 мм). Под действием данной минимальной нагрузки, шпиндель 3 акселератора выдвинется относительно направляющей 2 на минимальное расстояние (минимальный ход), при котором не будет выбран максимально возможный ход акселератора (фиг.2, г). Т.е. в этом случае длина хода расцепленного акселератора ясса будет значительно меньше его максимального хода и в отличие от предыдущего случая, растягивающая нагрузка на гидравлический ясс будет передаваться по другой схеме: «шпиндель акселератора 3 – полый шток 8 с упором 12 – выступ 11 подвижной втулки 10 – тарельчатые пружины сжатия 13 – корпус акселератора 1 – корпус компенсатора 14 – нижний переводник 15 – УБТ 18 – шпиндель ясса 19». При этом упор 12 полого штока акселератора 8 так же выберет свободный ход, и сжимая набор тарельчатых пружин сжатия 13, выдвинет подвижную втулку 10 на минимальное расстояние (фиг.2, б) относительно неподвижной цилиндрической втулки 9. После расцепления гидравлического ясса, аналогично предыдущему случаю, вся сборка «шпиндель ясса 19 – УБТ 18 – нижний переводник 15 – корпус компенсатора 14 – корпус акселератора 1 – направляющая 2» начнет резкое ускоренное движение вверх относительно шпинделя 3 (а так же переводника шпинделя 6 и полого штока 8) акселератора, выбирая вначале его подпружиненный ход, а затем и свободный ход. Как уже говорилось ранее, величина суммарного возможного перемещения всей сборки «шпиндель ясса 19 – УБТ 18 – нижний переводник 15 – корпус компенсатора 14 – корпус акселератора 1 – направляющая 2» вверх определяется только величиной свободного хода ясса вверх. Значит, для того что бы энергия удара движущейся массы реализовалась в яссе, а не в акселераторе, сумма длин подпружиненного и свободного хода акселератора при минимальной растягивающей нагрузке должна превышать величину свободного хода ясса вверх. Заметим, что этот вывод справедлив только в случае, когда мы пренебрегаем упругим растяжением рабочей колонны над акселератором. Однако даже в случае небольшой глубины прихвата и наличия жесткой колонны, упругое растяжение рабочей колонны над акселератором может оказаться вполне соизмеримым с величиной свободного хода ясса вверх, и мы не можем им пренебрегать. Покажем это на примере.
Пусть во время прихвата, допустим КНБК, интенсификатор оказался на небольшой глубине 250 метров, в жесткой рабочей колонне наружным диаметром 127 мм с толщиной стенки 10 мм (площадь поперечного сечения 36,74 х 10– 4 м2). Предположим, мы приложили небольшую растягивающую нагрузку на рабочую колонну – 10 тонн (100 кН). Принимая модуль упругости для стали 210 ГПа, осевая деформация растяжения рабочей колонны в этом случае будет рассчитана по формуле 1:

где h - глубина расчетного участка;
N - растягивающая нагрузка;
E - модуль упругости стали;
A - площадь поперечного сечения колонны.
Очевидно, что полученная величина, равная 32 мм, вполне соизмерима с величиной свободного хода верх гидравлических яссов, выпускаемых различными производителями (в среднем от 150 до 200 мм). Таким образом, вследствие упругого растяжения рабочей колонны 4 над устройством, шпиндель 3 с переводником 6 и штоком 8 после расцепления ясса так же начнет одновременно ускоренно перемещаться вверх за счет упругой деформации рабочей колонны труб 4, расположенной выше акселератора. Т.е. после расцепления ясса, вся сборка «шпиндель ясса 19 – УБТ 18 – нижний переводник 15 – корпус компенсатора 14 – корпус акселератора 1 – направляющая 2» начинает ускоренное движение вверх относительно шпинделя 3, переводника шпинделя 6 и полого штока 8 акселератора (за счет упругости тарельчатых пружин сжатия 13), и в то же время и сам шпиндель 3, переводник шпинделя 6 и полый шток 8 акселератора начнут ускоренное движение вверх относительно стенки скважины (за счет упругости рабочей колонны 4).
Заметим, что величина свободного хода гидравлического ясса вверх при этом останется неизменной, так как цилиндр и корпус ясса жестко связаны с прихваченным объектом. Следовательно, пробег всей сборки «шпиндель ясса 19 – УБТ 18 - нижний переводник 15 - корпус компенсатора 14 – корпус акселератора 1 - направляющая 2» относительно стенки скважины не может превысить величину свободного хода гидравлического ясса вверх. Как результат, часть свободного хода ясса будет выбираться за счет энергии упругости рабочей колонны (32 мм для условия примера), а остальные будут выбираться за счет энергии упругости тарельчатых пружин сжатия 13, т.е. за счет хода акселератора, который в себя включает подпружиненный и свободный ход. Следовательно, для того что бы энергия удара движущейся массы реализовалась в гидравлическом яссе, а не в акселераторе, сумма длин подпружиненного и свободного хода акселератора при минимальной растягивающей нагрузке должна превышать не величину свободного хода гидравлического ясса вверх 150…200 мм, а только величину 118…168 мм соответственно. Оценка упругих характеристик выпускаемых в настоящее время акселераторов показывает, что при минимальной растягивающей нагрузке 10 тонн, их подпружиненный ход составит около 30…40 мм. Значит, используя в предлагаемом техническом решении пружинные элементы, аналогичные известным, можно сделать вывод, что для того, чтобы сумма длин подпружиненного и свободного хода рассматриваемого акселератора при минимальной растягивающей нагрузке превысила величину 118…168 мм (для условий примера), для гидравлического ясса со свободным ходом вверх 150 мм свободный ход акселератора должен превышать разницу суммы длин подпружиненного и свободного хода и подпружиненного хода. Для условий примера эта величина составит от 78 до 88 мм. Для гидравлического ясса со свободным ходом вверх 200 мм, свободный ход акселератора должен быть более 128-138 мм. Сравнивая величины 150 мм и 88(78) мм, 200 мм и 128(138) мм, а так же принимая во внимание, что как правило отбивку прихваченного объекта начинают с нагрузок, превышающих 10 тонн, а так же тот факт, что большинство прихватов происходит на глубинах значительно превышающих условия примера (250 м), возможно сделать вывод, что для того, чтобы реализация энергии удара движущейся массы происходила в гидравлическом яссе, а не в акселераторе, для подавляющего большинства случаев применения акселератора длина его свободного хода должна быть не менее половины свободного хода гидравлического ясса, с которым он работает (не менее 75…100 мм для условий примера). Данное условие можно принять как нижнюю границу величины свободного хода акселератора. Мы считаем, что данное условие будет справедливым для подавляющего случаев применения акселераторов в скважине и большинства их типоразмеров, так как, например, уменьшение условного диаметра акселератора и применяемого с ним ясса ведет к увеличению упругости применяемой с ним рабочей колонны, а значит и к занижению величины необходимого свободного хода акселератора. Вместе с тем, по нашему мнению, свободный ход акселератора лучше выполнить несколько больше половины свободного хода ясса вверх, так как это увеличит общий ход акселератора при минимальной растягивающей нагрузке в сравнении со свободным ходом ясса вверх. Однако заметим, что значительное увеличение хода акселератора ведет к существенному увеличению его длины, что может негативно повлиять на надежность работы акселератора на искривленных участках скважины. С другой стороны, принимая во внимание факт, что при подобном исполнении акселератора удар в яссе будет реализовываться на участке свободного хода акселератора даже при минимальных растягивающих нагрузках, мы можем сделать вывод, что возникающая при этом продольная волна возмущения не будет иметь возможности перехода через полый шток 8 и шпиндель 3 акселератора на рабочую колонну труб 4, расположенную выше акселератора и далее на поверхностное оборудование.
Предлагаемое техническое решение так же позволяет обеспечить более плавное доведение нагрузки на долото в процессе бурения наклонно направленных и горизонтальных скважин. Известно, что в процессе бурения подобных скважин заглубление КНБК и рабочей колонны осуществляется неравномерно, рывками, что является дополнительным источником ударных нагрузок не только на дорогостоящие элементы КНБК, такие как забойный двигатель, электронные компоненты роторно-управляемых систем (РУС) и телесистем, но и на рабочую колонну, а через нее и на дорогостоящее поверхностное оборудование (например, верхний привод), снижая их ресурс.
Предлагаемое техническое решение позволит снизить вредное влияние данного явления на скважинное и поверхностное оборудование и обеспечить более плавное доведение нагрузки на долото. Рассмотрим данную конструктивную особенность устройства более подробно.
Проходные каналы шпинделя 3 акселератора и полого штока 8 образуют внутренний гидравлический канал устройства, сообщенный с внутренней полостью рабочей колонны труб 4, по которому прокачивается под давлением буровой раствор к КНБК. Данный внутренний гидравлический канал акселератора гидравлически изолирован от затрубного пространства посредством уплотнительных элементов 7 шпинделя 3 и подвижного поплавка 16. Значит в процессе бурения перепад давления между внутренним гидравлическим каналом устройства в сравнении с затрубным пространством (на уровне акселератора) будет определяться потерями напора бурового раствора при его движении вниз к КНБК, потерями в самом КНБК и потерями напора при движении обратно, и составит в большинстве случаев около 80…100 атм (потери напора в долоте, в забойном двигателе, телесистеме и в трубах). Как известно из теории и практики бурения, в подобной системе при этих условиях начнут проявляться гидростатические силы, под действием которых на шпиндель 3 акселератора начнет действовать выталкивающая сила (выталкивающая – только для рассматриваемого случая, иногда может быть и смыкающая сила), величина которой определяется перепадом давления между внутритрубным и затрубным пространством на уровне акселератора и поперечным сечением уплотняемого диаметра шпинделя 3 (для акселератора условным наружным диаметром 172 мм, уплотняемый диаметр шпинделя можно конструктивно выполнить около 150 мм (15 см)). Величину этой силы для наших условий возможно рассчитать по формуле 2:
 , (2)
, (2)
 атм,
атм,
 17 атм.
17 атм.
где d - диаметр шпинделя;
∆P - потери напора бурового раствора.
Мы видим, что данная нагрузка вполне соизмерима с величиной оптимальной нагрузки на долото PDC (долото с поликристаллическими алмазными резцами) для условий примера. Данное явление широко известно в практике бурения и нефтедобыче, в частности в практике применения гидравлических яссов, оно получило название «насосный эффект», «открывающий эффект» (c природой проявления данных сил можно ознакомится в статьях - «Корректор подачи-демпфер и протектор забойный производства ООО НПП «Буринтех», Бурение и нефть, №12, 2019 г.; «Влияние избыточного давления в трубах на работу гидравлических яссов», Бурение и нефть, №12, 2008 г). В зарубежной практике данное явление больше рассматривается с точки зрения его влияния на устойчивость бурильных колонн и колонн насосно-компрессорных труб, оно известно, как «феномен Лубинского» (Lubinski A and Blenkarn K.A. Buckling of Tubing in Pumping Wells, Its Effect and Means for Controlling It. SPE-672-G).
Таким образом, под действием данной силы шпиндель 3 акселератора будет постоянно выдвинут наружу в процессе бурения, выбрав полностью его свободный ход и, несколько сжав тарельчатые пружины сжатия 13. Заметим, даже в случае нахождения устройства на нейтральной линии или на сжатом участке рабочей колонны (прямо над КНБК), величина данной силы вполне соизмерима с нагрузкой на долото PDC. Очевидно, что при установке акселератора с яссом на значительном отдалении от КНБК, акселератор будет расцеплен дополнительно под действием веса рабочей колонны ниже устройства. Таким образом, осевая сжимающая нагрузка до определённого значения (в нашем примере от 14 до 17 тонн) будет передаваться через акселератор не по жесткому механическому контакту поверхностей деталей устройства, а за счет гидростатической силы, обеспечивающей подвижность шпинделя 3 в случае приложения резких динамических сжимающих нагрузок.
Теоретические исследования и промысловые наблюдения показали, что в процессе бурения наклонно направленных и горизонтальных скважин заглубление рабочей колонны по мере разрушения горной породы происходит неравномерно, скачками. Это объясняется тем, что вследствие значительных сил трения рабочая колонна «залипает» к стенке скважины и по мере заглубления скважины она резко срывается вниз, вызывая ударное приложение долота и всей КНБК к забою скважины. Подобный характер движения рабочей колонны объясняется тем, что коэффициент трения покоя между рабочей колонной и стенкой скважины значительно превышает коэффициент трения движения, картину явления осложняет и спиралевидный или синусоидальный изгиб рабочей колонны возникающий как под действием сжимающей нагрузки, так и под действием крутящего момента, прилагаемого к рабочей колонне (включая реактивный момент при бурении забойным двигателем).
В случае применения предлагаемого технического решения, обусловленное данным явлением внезапное резкое перемещение рабочей колонны вниз будет компенсироваться перемещением шпинделя 3 относительно корпуса акселератора 1 в пределах его свободного хода, более того, выталкивающая гидростатическая сила, действующая на шпиндель 3 акселератора, будет противодействовать передаче динамических нагрузок на КНБК ниже устройства. Вместе с тем, в моменты времени «залипания» рабочей колонны передача осевой нагрузки, ее доведение до КНБК будет обеспечиваться выталкивающей гидростатической силой, действующей на шпиндель 3 акселератора в пределах его свободного хода, что позволит обеспечить более плавное доведение сжимающей нагрузки до долота в процессе бурения.
Выше уже говорилось о том, что для эффективной работы акселератора с возможностью предотвращения передачи продольной волны возмущения на рабочую колонну труб, расположенную выше акселератора, и далее на поверхностное оборудование, длина свободного хода акселератора должна быть не менее половины свободного хода ясса, с которым работает акселератор. Вместе с тем мы считаем, что для того, чтобы обеспечить более эффективную работу акселератора как устройства для гашения ударных нагрузок на КНБК и рабочую колонну, вызванных неравномерным скачкообразным заглублением рабочей колонны, а также обеспечить более равномерное нагружение долота осевой нагрузкой в процессе бурения горизонтальных или близких к горизонтали скважин, свободный ход акселератора должен несколько превышать свободный ход ясса вверх.
Использование предлагаемого технического решения позволит расширить функциональные возможности акселератора, снизить динамические нагрузки, действующие на рабочую колонну, КНБК и поверхностное оборудование не только в процессе работы ясса, но и в процессе бурения скважины. Мы считаем, что применение устройства не будет ограничиваться только бурением горизонтальных или близких к горизонтали участков ствола скважины, оно будет полезным и при бурении вертикальных и условно вертикально скважин, где могут наблюдаться затруднения с доведением нагрузки до долота, обусловленные проблемой потери устойчивости рабочей колонны, складывания ее в синусоидальную или спиралевидную форму.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРАВЛИЧЕСКИЙ ЯСС | 2009 |
|
RU2408775C1 |
| ЯСС ГИДРОМЕХАНИЧЕСКИЙ | 2004 |
|
RU2284405C2 |
| Ясс гидравлический бурильный (варианты) и манжета уплотнительная для ясса | 2024 |
|
RU2839099C1 |
| Ускоритель для яссов | 1989 |
|
SU1744234A1 |
| БУРОВОЙ АКСЕЛЕРАТОР ДЛЯ УСИЛЕНИЯ УДАРА БУРИЛЬНОГО ЯСА | 2014 |
|
RU2571961C1 |
| ЯСС | 2007 |
|
RU2344269C1 |
| ГИДРАВЛИЧЕСКИЙ ЯСС ДВОЙНОГО ДЕЙСТВИЯ | 2002 |
|
RU2230880C2 |
| Механический ясс | 1987 |
|
SU1506072A1 |
| ГИДРАВЛИЧЕСКИЙ БУРИЛЬНЫЙ ЯС ДВУХСТОРОННЕГО ДЕЙСТВИЯ | 2013 |
|
RU2544352C2 |
| Устройство для ликвидации прихватов колонны труб в скважине | 1979 |
|
SU881295A1 |
Изобретение относится к нефтегазодобывающей отрасли и может быть использовано для освобождения бурового оборудования, прихваченного в скважине. Устройство содержит шпиндель, связанный с рабочей колонной труб и направляющей, взаимодействующей со шпинделем посредством шлицевого соединения, корпус и нижний переводник, жестко связанные c направляющей и между собой, полый шток, жестко и соосно связанный со шпинделем и размещенный коаксиально корпусу, тарельчатые пружины сжатия, размещенные соосно в корпусе, упор на полом штоке и герметизированную масляную камеру с поплавком. В нижней части корпуса коаксиально размещена неподвижная цилиндрическая втулка, жестко связанная с корпусом, образуя с полым штоком внутреннюю кольцевую полость, внутри которой соосно установлена подвижная втулка с возможностью осевого перемещения, которая содержит выступ для взаимодействия с верхним торцом неподвижной цилиндрической втулки и тарельчатыми пружинами сжатия в сомкнутом состоянии акселератора, обеспечивающем передачу сжимающей нагрузки на гидравлический ясс. Расстояние между упором полого штока и нижней поверхностью подвижной втулки представляет собой свободный неподпружиненный ход акселератора. Максимальный ход акселератора соответствует выдвижению шпинделя относительно направляющей на максимально возможное расстояние, ограниченное ходом переводника шпинделя внутри направляющей. Длина свободного неподпружиненного хода акселератора составляет не менее половины длины свободного хода гидравлического ясса. Длина максимального хода акселератора превышает длину свободного хода гидравлического ясса при ударе вверх. Расширяются функциональные возможности акселератора, снижаются динамические нагрузки, действующие на рабочую колонну, КНБК и поверхностное оборудование как в процессе работы ясса, так и во время бурения. 2 ил.
Акселератор гидравлического ясса, содержащий шпиндель, связанный с рабочей колонной труб и направляющей, взаимодействующей со шпинделем посредством шлицевого соединения, корпус и нижний переводник, жестко связанные c направляющей и между собой, полый шток, жестко и соосно связанный со шпинделем посредством переводника шпинделя и размещенный коаксиально корпусу, тарельчатые пружины сжатия, размещенные соосно в корпусе, упор, выполненный на полом штоке, и герметизированную масляную камеру с поплавком, выполненную в корпусе, отличающийся тем, что в нижней части корпуса коаксиально размещена неподвижная цилиндрическая втулка, жестко связанная с корпусом, образуя с полым штоком внутреннюю кольцевую полость, внутри которой соосно установлена подвижная втулка с возможностью осевого перемещения, которая содержит выступ, выполненный для взаимодействия с верхним торцом неподвижной цилиндрической втулки и тарельчатыми пружинами сжатия в сомкнутом состоянии акселератора, обеспечивающем передачу сжимающей нагрузки на гидравлический ясс через шпиндель к направляющей через шлицевое соединение, расстояние между упором полого штока и нижней поверхностью подвижной втулки представляет собой свободный неподпружиненный ход акселератора, максимальный ход акселератора соответствует выдвижению шпинделя относительно направляющей на максимально возможное расстояние, ограниченное ходом переводника шпинделя внутри направляющей, при этом длина свободного неподпружиненного хода акселератора составляет не менее половины длины свободного хода гидравлического ясса, а длина максимального хода акселератора превышает длину свободного хода гидравлического ясса при ударе вверх.
| US 4844157 A1, 04.07.1989 | |||
| Ускоритель для яссов | 1989 |
|
SU1744234A1 |
| ГИДРАВЛИЧЕСКИЙ ЯСС | 2004 |
|
RU2272122C2 |
| БУРОВОЙ АКСЕЛЕРАТОР ДЛЯ УСИЛЕНИЯ УДАРА БУРИЛЬНОГО ЯСА | 2014 |
|
RU2571961C1 |
| US 10787875 B2, 29.09.2020. | |||

