Область техники: настоящее устройство относится к области авиационной техники и аэронавтики.
Из предшествующего уровня техники известен высокоманевренный дирижабль дискообразной формы (патент Великобритании №2027403, кл. B7W 11А10, 1980 г.) В качестве движителей силовой установки на аппарате использованы четыре поворотных воздушных сопла, расположенные симметрично по периферии силового диска. На аппарате установлен газотурбинный двигатель, поток выхлопных газов которого направляется по трубам к соплам, меняющим скорость и направление истечения газа.
Помимо этого известен также гибридный дирижабль линзообразной формы (патентный документ RU 2546027 С2, опубликован 10.04.2015) в виде круглой двояковыпуклой симметричной или несимметричной линзы, полужесткой или жесткой конструкции. Аппарат снабжен силовой установкой, где в качестве движителей использованы воздушные винты, четыре из которых создают вертикальную тягу, а еще четыре - горизонтальную.
Помимо этого известен также гибридный квадрокоптер (патентный документ RU 2702462 С1, опубликован 12.02.2019), состоящий из герметичной оболочки, заполненной легким газом, гондолы с бортовой аппаратурой управления беспилотным полетом в воздухе, аккумуляторной батареей, крестообразно отходящими в стороны кронштейнами и воздушно-винтовыми авиадвигателями переменной тяги на их оконечностях.
В качестве прототипа был выбран беспилотный летательный аппарат нулевой плавучести (патентный документ RU 214475 U1, опубликован 28.10.2022), состоящий из полимерного корпуса жесткой конструкции аэродинамической двояковыпуклой дискообразной формы, заполненного легким газом, обладающим подъемной силой, воздушно-винтовых авиадвигателей переменной тяги, расположенных симметрично по периферии корпуса, обеспечивающих перемещение летательного аппарата в трехмерном пространстве.
Задача: задача, на решение которой направлено заявленное техническое решение, заключается в повышении эффективности работы при осуществлении фото- и видеосъемки объектов, спортивных и развлекательных мероприятий, обучении операторов беспилотных летательных аппаратов: экономичность.
Данная задача достигается за счет того, что объем корпуса (см. фигура 1, позиция 1 и фигура 2, позиция 1) выполнен в объеме, необходимом для вмещения такого количества легкого газа, чтобы обеспечивалась нулевая плавучесть летательного аппарата, что способствует легкому (сравнительно с аппаратами тяжелее воздуха) взлету при помощи воздушно-винтовых авиадвигателей переменной тяги (см. фигура 1, позиция 2 и фигура 2, позиция 2), расположенных симметрично в гондоле обтекаемой формы (интегрированной с блоком управления и аккумуляторными батареями), не выходящих за плоскость поверхности гондолы, обеспечивающих перемещение в трехмерном пространстве летательного аппарата.
Форма сферического беспилотного летательного аппарата нулевой плавучести, состоящего из полимерного корпуса мягкой конструкции (см. фигура 1, позиция 1 и фигура 2, позиция 1) сферической формы, заполненного легким газом, обладающего подъемной силой, и гондолы обтекаемой формы (см. фигура 1, позиция 3 и фигура 2, позиция 3), интегрированной с блоком управления и аккумуляторными батареями, воздушно-винтовых авиадвигателей переменной тяги (см. фигура 1, позиция 2 и фигура 2, позиция 2), расположенных симметрично в гондоле, не выходя за ее поверхность, обеспечивающих перемещение летательного аппарата в трехмерном пространстве, клапана подачи (см. фигура 1, позиция 5) и стравливания легкого газа (см. фигура 1, позиция 6), отличающийся тем, что объем корпуса выполнен в объеме, необходимом для вмещения такого количества легкого газа, обладающего подъемной силой, чтобы обеспечивалась постоянная нулевая плавучесть летательного аппарата, при этом на нижней поверхности корпуса расположена гондола обтекаемой формы, интегрированная с блоком управления, аккумуляторными батареями и воздушно-винтовыми авиадвигателями переменной тяги.
Технический результат, обеспечиваемый сферическим беспилотным летательным аппаратом нулевой плавучести, осуществляется за счет постоянной нейтральной подъемной силы, создаваемой легким газом (обладающего подъемной силой) в корпусе аппарата, в объеме, необходимом для вмещения такого количества легкого газа, обладающего подъемной силой, чтобы обеспечивалась постоянная нулевая плавучесть летательного аппарата, вследствие чего двигатели необходимы только для обеспечения перемещения летательного аппарата в трехмерном пространстве, что дает экономический эффект в сравнении как с аппаратами тяжелее воздуха - в сферическом беспилотном летательном аппарате нулевой плавучести двигатели нужны только для перемещения в трехмерном пространстве летательного аппарата, а не для обеспечения самого полета, так и с аппаратами легче воздуха - в сферическом беспилотном летательном аппарате нулевой плавучести не нужен большой объем газа, при этом обеспечивается возможность маневрирования, приближающаяся по своим характеристикам к аппаратам тяжелее воздуха. Таким образом, в качестве технического результата мы получаем экономичность.
Для достижения данного технического результата существенным будет то, что сферический беспилотный летательный аппарат нулевой плавучести, состоящий из полимерного корпуса мягкой сферической формы, заполненного легким газом, обладающего подъемной силой, и гондолы обтекаемой формы, интегрированной с блоком управления и аккумуляторными батареями, воздушно-винтовыми авиадвигателями переменной тяги, расположенными симметрично в гондоле, не выходя за ее поверхность, обеспечивающими перемещение летательного аппарата в трехмерном пространстве, клапана подачи и стравливания легкого газа, при этом объем корпуса выполнен в объеме, необходимом для вмещения такого количества легкого газа, обладающего подъемной силой, чтобы обеспечивалась постоянная нулевая плавучесть летательного аппарата.
Осуществление изобретения: сферический беспилотный летательный аппарат нулевой плавучести работает следующим образом: корпус (см. фигура 1, позиция 1 и фигура 2, позиция 1) заполняется легким газом через клапан подачи (см. фигура 1, позиция 5) в объеме, достаточном для обеспечения аппарату нейтральной подъемной силы. Воздушно-винтовые авиадвигатели переменной тяги (см. фигура 1, позиция 2 и фигура 2, позиция 2), расположенные симметрично в гондоле, обеспечивают перемещение в трехмерном пространстве летательного аппарата, гондола интегрированная с блоком управления аппаратурой беспилотного режима полета и аккумуляторной батареей (см. фигура 1, позиция 3) осуществляет контроль, обеспечение энергией двигателей и управление аппаратом, убирающиеся опоры с прицепным устройством для перевозки навесного оборудования (см. фигура 1, позиция 4) служат для приземления на поверхность Земли, а также для установки дополнительного навесного оборудования. Для стравливания легкого газа предусмотрен клапан (см. фигура 1, позиция 6).
Краткое описание чертежей:
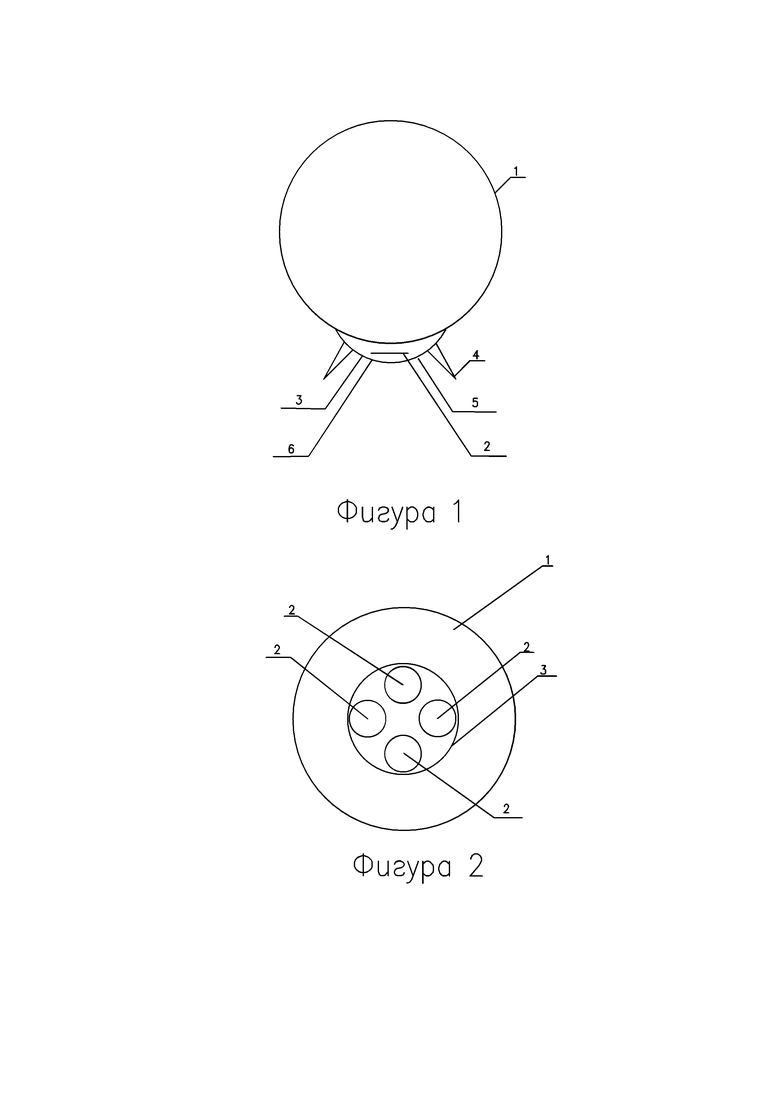
фигура 1 отображает сферический беспилотный летательный аппарат нулевой плавучести вид сбоку, где позиция 1 - полимерный корпус мягкой сферической формы, заполненный легким газом в объеме, необходимом для вмещения такого количества легкого газа, чтобы обеспечивалась нулевая плавучесть летательного аппарата, позиция 2 - воздушно-винтовые авиадвигатели переменной тяги, обеспечивающие перемещение в трехмерном пространстве летательного аппарата, позиция 3 - гондола интегрированная с блоком управления аппаратурой беспилотного режима полета и аккумуляторной батареей, позиция 4 - опоры с прицепным устройством для монтажа навесного оборудования, позиция 5 - клапан подачи легкого газа, позиция 6 - клапан стравливания легкого газа.
фигура 2 отображает сферический беспилотный летательный аппарат нулевой плавучести вид сверху, где позиция 1 - полимерный корпус мягкой сферической формы, заполненный легким газом в объеме, необходимом для вмещения такого количества легкого газа, чтобы обеспечивалась нулевая плавучесть летательного аппарата, позиция 2 - воздушно-винтовые авиадвигатели переменной тяги, обеспечивающие перемещение в трехмерном пространстве летательного аппарата.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИБРИДНЫЙ КВАДРОКОПТЕР | 2019 |
|
RU2702462C1 |
| Энергонезависимый многоцелевой беспилотный летательный аппарат | 2020 |
|
RU2741825C1 |
| Гибридная аэромобильная система воздушного наблюдения | 2023 |
|
RU2827131C1 |
| КВАДРОКОПТЕР | 2024 |
|
RU2831865C1 |
| Беспилотная система мониторинга поверхности земли | 2022 |
|
RU2788553C1 |
| Беспилотный летательный аппарат с генерацией электроэнергии | 2021 |
|
RU2769036C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2013 |
|
RU2511735C1 |
| МОБИЛЬНЫЙ МОДУЛЬ АЭРОЭНЕРГОСТАТА | 2021 |
|
RU2762471C1 |
| РАЗВЕДЫВАТЕЛЬНЫЙ БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2023 |
|
RU2806574C1 |
| АЭРОЭНЕРГОСТАТ МЯГКОБАЛЛОННЫЙ | 2019 |
|
RU2703098C1 |
Настоящее устройство относится к области авиационной техники и аэронавтики. Беспилотный летательный аппарат нулевой плавучести состоит из полимерного корпуса мягкой конструкции, заполненного легким газом, обладающего подъемной силой, на нижней поверхности корпуса расположена гондола обтекаемой формы с интегрированными в нее аккумуляторными батареями и блоком управления аппаратурой беспилотного режима полета и аккумуляторными батареями. Беспилотный летательный аппарат также снабжен воздушно-винтовыми авиадвигателями переменной тяги, обеспечивающими перемещение летательного аппарата в трехмерном пространстве, и клапанами подачи и стравливания легкого газа. При этом корпус выполнен в объеме, необходимом для вмещения такого количества легкого газа, чтобы обеспечивалась постоянная нулевая плавучесть летательного аппарата. Причем корпус летательного аппарата имеет сферическую форму, а гондола выполнена с интегрированными в нее воздушно-винтовыми авиадвигателями, расположенными симметрично и не выходящими за ее поверхность. Задача изобретения - повышение эффективности работы, экономичность. 2 ил.
Беспилотный летательный аппарат нулевой плавучести, состоящий из полимерного корпуса мягкой конструкции, заполненного легким газом, обладающего подъемной силой, на нижней поверхности корпуса расположена гондола обтекаемой формы с интегрированными в нее аккумуляторными батареями и блоком управления аппаратурой беспилотного режима полета и аккумуляторными батареями, беспилотный летательный аппарат также снабжен воздушно-винтовыми авиадвигателями переменной тяги, обеспечивающими перемещение летательного аппарата в трехмерном пространстве и клапанами подачи и стравливания легкого газа, при этом корпус выполнен в объеме, необходимом для вмещения такого количества легкого газа, чтобы обеспечивалась постоянная нулевая плавучесть летательного аппарата, отличающийся тем, что корпус летательного аппарата имеет сферическую форму, а гондола выполнена с интегрированными в нее воздушно-винтовыми авиадвигателями, расположенными симметрично и не выходя за ее поверхность.
| RU 214475 U1, 28.10.2022 | |||
| CN 107813926 A, 20.03.2018 | |||
| CN 104401486 A, 11.03.2015 | |||
| CN 105015755 A, 04.11.2015 | |||
| US 2019009889 A1, 10.01.2019. |

