Изобретение относится к области беспилотной авиации и может быть использовано для решения разных народнохозяйственных задач, в частности спасения людей, доставки грузов и т.п.
Известен гибридный квадрокоптер (см. RU 2702462 С1, 08.02.2019), состоящий из герметичной оболочки, заполненной легким газом, гондолы с бортовой аппаратурой управления беспилотным полетом в воздухе, аккумуляторной батарей, крестообразно отходящими в стороны кронштейнами и воздушно-винтовыми авиадвигателями переменной тяги на их оконечностях. При этом оболочка выполнена в виде двояковыпуклой линзы с мягкой горизонтально-складчатой поверхностью и опирается на внутреннюю центрально-осевую телескопическую колонну с вложенными звеньями, свободно перемещающимися в ее корпусе, из которого и из соосного звена выдвинуто вверх центрально-осевое звено, а часть самого корпуса выступает вниз за пределы оболочки, имея на конце заглушку и крепежные захваты; опора оболочки на телескопическую колонну осуществляется за счет соединения жесткой выпуклой крышки с верхним торцом вложенного центрально-осевого звена, а также через соединение жесткого плоского днища оболочки, имеющего два автоматических клапана подачи и стравливания легкого газа, с корпусом колонны в месте, где он выходит из оболочки; гондола подвешена к корпусу опорной колонны ниже днища оболочки и не соприкасаясь с ним, относящиеся к гондоле воздушно-винтовые авиадвигатели способны работать в реверсивном режиме. Кроме того периферийная кромка газонаполненной двояковыпуклой оболочки усилена изнутри твердым ободом и на оболочку надет гладкий эластичный чехол.
Недостатками этого технического решения можно считать нежелательную зависимость объема закачиваемого газа в оболочку от веса конкретного груза при его подъеме гибридным квадрокоптером и сложности, связанные со стравливанием избытка легкого газа до объема, способного создать нейтральную плавучесть конструкции с умеренно утяжеленной аккумуляторной батарей и уменьшенным грузом для создания условий более продолжительного полета винтокрылого летательного аппарата на дальние расстояния.
Наиболее близким техническим решением к предлагаемому является принятый за прототип квадрокоптер (см. Интернет ресурс: Из чего состоит квадрокоптер? Устройство дрона…dji-blog.ru). На примере модели DJI Inspire 1, основными элементами этого квадрокоптера являются четыре двигателя с пропеллерами, регулятор скорости, аккумуляторная батарея, полетный контроллер, приемник, передатчик и камера. В этом техническом решении регулятор скорости представляет собой электрическую цепь, которая призвана контролировать скоростной режим беспилотника. По сути, это важное устройство передает энергию от батареи к двигателю бесколлекторного типа, преобразуя постоянный ток источника питания в переменный ток, который нужен мотору. Полетный контроллер отвечает за передачу всех команд, которые пилот передает на борт летающего аппарата. А если точнее, то в задачи контроллера входит интерпретация входящих данных от ресивера (приемника), монитора батареи. Кроме этого, полетный контроллер взаимодействует с электронными регуляторами хода и тем самым следит за работой двигателя и регулировку скорости, что является частью задач по управлению коптером. Приемник - это устройство, отвечающее за прием радиосигналов, посылаемых квадрокоптеру через контроллер. Передатчик - это устройство, отвечающее за передачу радиосигналов от контроллера к квадрокоптеру для выдачи команд о направлении полета и других связанных с этим параметров. Приемник и передатчик должны использовать один радиосигнал для связи с дроном во время полета. Каждый радиосигнал имеет стандартный код, который помогает отличать в эфире свой сигнал от чужих. Аккумуляторная батарея является одной из основных частей беспилотника. Без нее невозможно запустить дрон и выполнить все поставленные полетные задачи. С помощью камеры можно вести как любительскую, так и профессиональную съемку с воздуха. Двигатели с пропеллерами дают возможность осуществить подъем квадрокоптера вверх, опускание вниз, произвести зависание в воздухе, полет вперед и назад, а также поворот направо или налево, и другие маневры.
К недостатку этого известного источника можно отнести низкую надежность при круговом движении квадрокоптера.
Техническим результатом предлагаемого технического решения является повышение надежности кругового движения квадрокоптера.
Технический результат достигается тем, что квадрокоптер содержит четыре двигателя с пропеллерами, закрепленные на раме квадрокоптера одними концами четыре луча, расположенную на его раме квадрокоптера бортовую аппаратуру в виде регулятора скорости, аккумуляторной батарей, полетного контроллера, приемника, передатчика и камеры, квадрокоптер дополнительно содержит четыре двигателя с пропеллерами, при этом на вторых свободных концах каждого луча жестко закреплены Z-образные равнополочные профили без подгибов, на параллельных гранях каждого Z-образного профиля устанавливают по два двигателя с пропеллерами, причем первые четыре пропеллеры, расположенные диаметрально, могут вращаться по часовой стрелке, а вторые четыре пропеллеры, расположены также диаметрально - против часовой стрелке.
Сущность заявляемого изобретения, характеризуемого совокупностью указанных выше признаков, состоит в том, что на базе восьми двигателей с пропеллерами, расположенных на параллельных гранях перпендикулярно к ним четырех Z-образных профилей, можно обеспечить улучшение степени маневрирования квадрокоптера.
Наличие в заявляемом устройстве совокупности перечисленных существующих признаков, позволяет решить задачу повышение надежности кругового движения квадрокоптера посредством использования восьми двигателей с пропеллерами, расположенных на параллельных гранях перпендикулярно к ним четырех Z-образных профилей, т.е. повысить надежность кругового движения квадрокоптера.
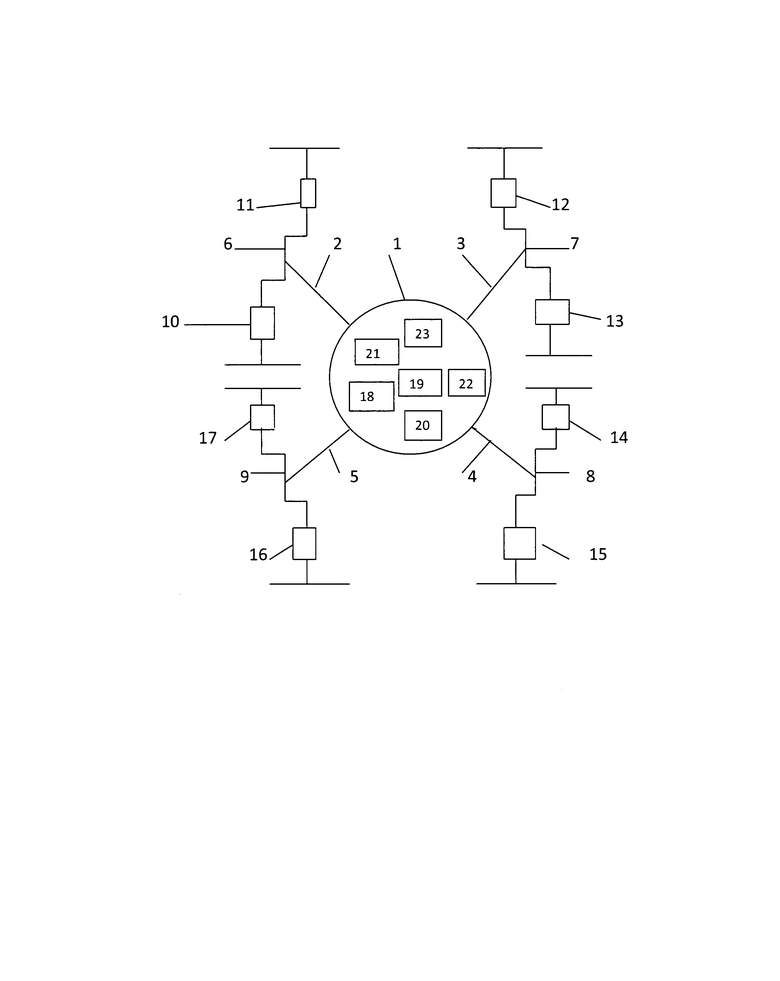
На чертеже приведена функциональная схема мобильного квадрокоптера.
Мобильный квадрокоптер содержит раму 1, первый луч 2, второй луч 3, третий луч 4, четвертый луч 5, первый Z-образный равнополочный профиль без подгибов 6, второй Z-образный равнополочный профиль без подгибов 7, третий Z-образный равнополочный профиль без подгибов 8, четвертый Z-образный равнополочный профиль без подгибов 9, первый двигатель с пропеллером 10, второй двигатель с пропеллером 11, третий двигатель с пропеллером 12, четвертый двигатель с пропеллером 13, пятый двигатель с пропеллером 14, шестой двигатель с пропеллером 15, седьмой двигатель с пропеллером 16, восьмой двигатель с пропеллером 17, регулятор скорости 18, аккумуляторную батарею 19, полетный контроллер 20, приемник 21, передатчик 22 и камеру 23.
Работа предлагаемого мобильного коптера заключается в следующем. Предварительно перед запуском квадрокоптера производят его сборку. Для этого первый, второй, третий и четвертый лучи 2, 3, 4 и 5 одними (первыми) концами закрепляют к раме 1 по известной схеме. На вторых свободных концах четырех лучей жестко закрепляют основаниями симметрично первый Z-образный равнополочный профиль 6, второй Z -образный равнополочный профиль 7, третий Z-образный равнополочный профиль 8, четвертый Z-образный равнополочный профиль 9. После этого на двух параллельных гранях первого, второго, третьего и четвертого Z-образных профилей соответственно устанавливают перпендикулярно к граням первый, второй, третий, четвертый, пятый, шестой, седьмой и восьмой двигатели с пропеллерами 10, 11, 12, 13, 14, 15, 16 и 17. Из бортовой аппаратуры, расположенной на раме квадрокоптера, аккумуляторную батарею 19 подключают к регулятору скорости 18, полетному контроллеру 20, приемнику 21, передатчику 22 и камеру 23. После выполнения всех механических (крепежных) и электрических работ запускают квадрокоптер с помощью пульта. Пульт на схеме не показан.
Как известно благодаря вращательным движениям по часовой стрелке и против часовой стрелке диаметрально расположенных на концах лучей двигателей с пропеллерами, квадрокоптер и другие беспилотники с помощью бортовой аппаратуры совершают разные летательные маневрирования в воздухе. В общем виде у беспилотника можно выделить 4 вида маневра в воздухе: посадка, подъем, движение в сторону и поворот в плоскости. Первый осуществляется благодаря одновременному замедлению скорости вращения всех имеющихся винтов. Соответственно, при подъеме наоборот - скорость вращения всех винтов увеличивается. Для выполнения более сложного маневра - движения в сторону - необходимо винты с одной стороны беспилотника замедлить, а с другой - ускорить. А чтобы повернуть аппарат в плоскости, достаточно увеличить скорость вращения винтов, вращающихся против часовой стрелки, и замедлить винты, вращающиеся по часовой (или наоборот).
Так как данное техническое решение направлено на повышение надежности кругового движения квадрокоптера, то акцент в большой степени будет сделан на улучшении способности кругового поворота квадрокоптера, благодаря размещению несоосно на его четырех Z-образных профилях дополнительно четырех двигателей с винтами.
Из аэродинамики известно, что зависание беспилотника, например, с четырьмя роторами, обеспечивается посредством вращения первого и третьего двигателей (диаметрально расположенных на лучах) по часовой стрелке и второго и четвертого двигателей (диаметрально расположенные на лучах) против часовой стрелке. Другими словами из-за вращения в противоположенных направлениях диаметрально расположенных наборов двигателей суммарный угловой момент равен нулю. При этом чтобы повернуть беспилотник вправо, нужно уменьшить угловую скорость двигателя 1, а для поворота влево, нужно уменьшить угловую скорость двигателя 2. Что касается кругового вращения беспилотника (в зависимости от направления), необходимо уменьшить вращение двигателей 1 и 3 с увеличением вращения вращающихся роторов 2 и 4.
Как показывает практика в ряде случаев, например, при сильном ветре или необходимости поворота квадрокоптера с грузом, вращательные способности (рыскание) по тяге квадрокоптера с четырьмя моторами, могут оказаться недостаточными. В связи с этим, как уже было отмечено выше, квадрокоптер с четырьмя моторами, дополнительно снабжается четырьмя моторами аналогичными характеристиками.
Применительно к нашему случаю (квадрокоптер с восьми моторами), условно пусть первый и второй двигатели с пропеллерами выполняют функцию первого двигателя выше рассмотренного примера (квадрокоптер с четырьмя моторами), третий и четвертый - второго двигателя, пятый и шестой - третьего двигателя, седьмой и восьмой - четвертого двигаля при сохранении их диаметральности по расположению. Отсюда следует, что в данном случае, для того чтобы произвести поворот влево, нужно уменьшить угловую скорость третьего и четвертого двигателей, а для поворота вправо, нужно уменьшить угловую скорость первого и второго двигателей. В рассматриваемом случае для осуществления полета данного квадрокоптера по кругу необходимо уменьшить вращения первого, второго, пятого и шестого двигателей с увеличением вращения вращающихся двигателей второго, четвертого, седьмого и восьмого двигателей. В предлагаемом техническом решении все манипуляции, связанные с изменениями скоростных режимов всех восьмых двигателей с пропеллерами и другие действия блоков бортовой аппаратуры, в зависимости от вида маневрирования, производятся аналогично случаю квадрокоптера с четырьмя моторами. Другими словами в данном случае бортовая аппаратура вместо одного мотора управляет двумя моторами и вместо двух - четырьмя двигателями. При этом все коммуникации между блоками бортовой аппаратуры сохраняются в прежнем режиме.
Таким образом, в предлагаемом техническом решении на основе использования восьмых двигателей с пропеллерами, расположенных несоосно на параллельных гранях перпендикулярно к ним четырех Z-образных профилей, можно обеспечить повышение надежности кругового движения квадрокоптера.
| название | год | авторы | номер документа |
|---|---|---|---|
| Беспилотный летательный аппарат вертолётного типа | 2022 |
|
RU2799689C1 |
| Квадрокоптер | 2020 |
|
RU2734680C1 |
| Беспилотный летательный аппарат вертолетного типа | 2022 |
|
RU2792460C1 |
| Беспилотный летательный аппарат | 2023 |
|
RU2811206C1 |
| Малогабаритный летательный аппарат (ЛА) вертикального взлета/посадки с увеличенной дальностью полета | 2017 |
|
RU2681464C1 |
| БЕСПИЛОТНОЕ ВОЗДУШНОЕ СУДНО МУЛЬТИРОТОРНОГО ТИПА (БВС) ДЛЯ ТРАНСПОРТИРОВКИ МАЛОГАБАРИТНЫХ ГРУЗОВ | 2023 |
|
RU2823830C1 |
| ВОЗДУХОПЛАВАТЕЛЬНЫЙ АППАРАТ ДЛЯ ОЧИСТКИ ВОЗДУХА ГОРОДОВ ОТ ГАЗОВ И ПЫЛИ | 2015 |
|
RU2577606C1 |
| Беспилотная летательная платформа вертолётного типа с пневмомеханическим устройством для тушения пожаров | 2023 |
|
RU2814718C1 |
| СПОСОБ АВАРИЙНОЙ ПОСАДКИ КВАДРОКОПТЕРА | 2017 |
|
RU2657659C1 |
| Обучающий программируемый квадрокоптер | 2023 |
|
RU2798299C1 |
Изобретение относится к области авиации, в частности к конструкциям беспилотных летательных аппаратов. Квадрокоптер содержит четыре двигателя с пропеллерами, закрепленные на раме квадрокоптера одними концами четыре луча, расположенную на раме квадрокоптера бортовую аппаратуру в виде регулятора скорости, аккумуляторной батареи, полетного контроллера, приемника, передатчика и камеры. Квадрокоптер дополнительно содержит четыре двигателя с пропеллерами. На вторых свободных концах каждого луча жестко закрепляют Z-образные равнополочные профили без подгибов. На свободных концах каждого Z-образного профиля устанавливают по два двигателя с пропеллерами. Первые четыре пропеллера, расположенные диаметрально, могут вращаться по часовой стрелке, а вторые четыре пропеллера, расположенные диаметрально - против часовой стрелки. Обеспечивается повышение надежности кругового движения квадрокоптера. 1 ил.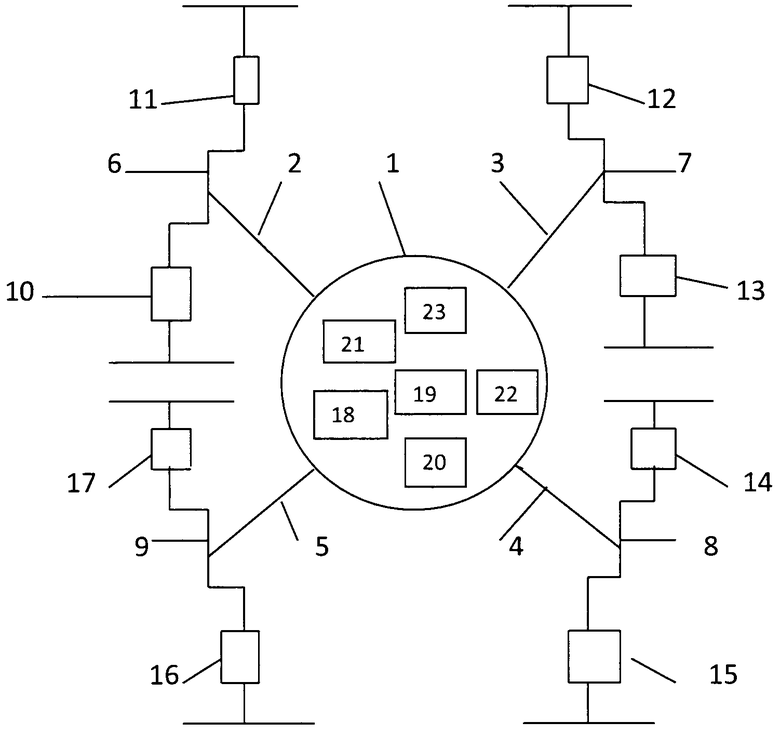
Квадрокоптер, содержащий четыре двигателя с пропеллерами, закрепленные на раме квадрокоптера одними концами четыре луча, расположенную на раме квадрокоптера бортовую аппаратуру в виде регулятора скорости, аккумуляторной батареи, полетного контроллера, приемника, передатчика и камеры, отличающийся тем, что квадрокоптер дополнительно содержит четыре двигателя с пропеллерами, при этом на вторых свободных концах каждого луча жестко закреплены Z-образные равнополочные профили без подгибов, на параллельных гранях каждого Z-образного профиля устанавливают по два двигателя с пропеллерами, причем первые четыре пропеллера, расположенные диаметрально, могут вращаться по часовой стрелке, а вторые четыре пропеллера, расположенные также диаметрально - против часовой стрелки.
| US 20230286651 A1, 14.09.2023 | |||
| Противотанковая мина "Стрекоза-М" с возможностью пространственного перемещения с зависанием и переворачиванием в воздухе, разведки, нейтрализации и поражения мобильных бронированных целей | 2016 |
|
RU2628351C1 |
| US 11608187 B2, 21.03.2023 | |||
| МУЛЬТИКОПТЕР С ДВУХЪЯРУСНЫМ РАСПОЛОЖЕНИЕМ ВИНТОМОТОРНЫХ ГРУПП | 2021 |
|
RU2766284C1 |

