Изобретение относится к области авиационной техники, в частности к беспилотным летательным аппаратам (БПЛА) легче воздуха.
В настоящее время широкое распространение приобрело использование беспилотников, они активно развиваются, существует большое количество разновидностей этих аппаратов и продолжается создание новых и совершенствование уже существующих. Беспилотные летательные аппараты (БПЛА) активно используются в различных сферах деятельности. В военном деле их используют для разведки, корректировки огня и нанесение ударов, съемки координат объектов противника, замера расстояний и площадей, они хорошо зарекомендовали себя в различных военных конфликтах.
Беспилотники, в мирных целях могут быть использованы при наблюдение за лесами, миграцией животных и птиц, рыбоохране, контролем состояние плотин и водоемов, газовых и транспортных магистралей, разведка во время чрезвычайных ситуаций, пожарный контроль за состоянием зданий и других объектов, доставка средств спасания терпящим бедствие, потерявшимся людям, альпинистам, геологам и т.п. мониторинг в зонах радиоактивного и химического заражения. Есть потребность применения БПЛА и в черте городов, где из-за пробок ни техническая, ни медицинская помощь быструю помощь оказать не могут. Активно развивается служба доставки корреспонденции, продуктов питания и других товаров, особенно в период пандемии.
В этой связи все большее внимание уделяется характеристикам БПЛА, их универсальности, возможности выполнять широкий спектра задач в течение длительного времени, возможность контролировать обстановку и доставлять грузы с различными массогабаритными характеристиками на большие расстояния. Применение новых технических решений влечет за собой совершенствование БПЛА, создание новых видов летательных аппаратов и новых источников энергии, новых двигательных установок.
Известен «Энергонезависимый многоцелевой беспилотный летательный аппарат» (патент RU 2741825, 2021 г.), содержащий фюзеляж, состоящий из шпангоутов и стрингеров, сверху покрытый пленкой с кремниевой солнечной батареей, фюзеляж имеет крыло биплан и разбит на несколько герметичных отсеков, часть отсеков заполнена подъемным газом, другие отсеки выполнены прочными и подсоединены к вакуумному насосу с системой стравливания воздуха и имеют впускной и выпускной клапаны, на крыльях фюзеляжа с каждого борта размешены вертикальные многолопастные ветрогенераторы и воздушно-винтовые электродвигатели, сверху фюзеляжа расположены блоки системы спутниковой навигации ГЛОНАСС и блоки системы связи, внутри размещены аккумуляторная батарея и система управления, в нижней части устройства крепления сменного модуля полезной нагрузки.
Недостатком этого устройства является зависимость от запасов электроэнергии на борту, сложность ее генерации в необходимом количестве, особенно в темное время суток и в безветренную погоду.
Также известен «Аэростатический летательный аппарат» (патент RU 2239582, 2004 г.) содержащий заполненный газом легче воздуха, например гелием, тороидальный баллон с мягкой оболочкой, внутренняя часть которого образует воздушный канал, внутри которого расположены двигатель, выполненный с возможностью обеспечения вращения привода, и привод, на оси которого находится несущий винт, а также подключенная к двигателю аппаратура управления летательным аппаратом, балочные держатели и прикрепленные к нижней кромке баллона посадочные приспособления, при этом ось вращения несущего винта совпадает с осью симметрии тороидального баллона с мягкой оболочкой, внутренняя стенка воздушного канала выполнена в виде жесткого экрана, к поверхности которого с помощью балочных держателей прикреплена мотогондола, внутри которой установлена аппаратура управления летательным аппаратом, двигатель помещен в мотогондолу и ориентирован вдоль ее оси симметрии, на оси привода установлены лопатки спрямляющего аппарата с изменяемым углом атаки и автомат перекоса, обеспечивающий наклон вектора тяги несущего винта, при этом управляющие входы спрямляющего аппарата и автомата перекоса подключены к аппаратуре управления летательным аппаратом.
Недостатком этого устройства является то, что источник питания находится на земле и связан с двигателем и с аппаратурой управления летательным аппаратом кабелем-тросом. Это ограничивает возможности применения летательного аппарата, снижает полезную нагрузку, спектр и эффективность решения задач.
Наиболее близкой по технической сущности к заявленному изобретению является «Гибридный беспилотный летательный аппарат» (патент RU 198620, 2020 г.) включающий корпус в виде эллипсоида вращения со сквозным осевым отверстием, два противоположно вращающихся воздушных тяговых винта, размещенных соосно в отверстии на оси корпуса, блок полезной нагрузки, прикрепленный к корпусу аппарата в его нижней части, имеет не менее трех подвижных в радиальном направлении по отношению к оси корпуса аккумуляторных батарей, размещенных симметрично относительно оси корпуса и снабженных электроприводами, при этом управление аппаратом в процессе полета осуществляется изменением центра тяжести аппарата путем перемещения аккумуляторных батарей.
Недостатком этого устройства является сложность управления полетом летательного аппарата за счет изменения центра тяжести аппарата путем перемещения аккумуляторных батарей, а также ограничение накопления электроэнергии только аккумуляторными батареями, которых используется большое количество, что снижает массу полезной нагрузки.
Задачей изобретения является создание беспилотного летательного аппарата с генерацией электроэнергии, способного длительное время автономно осуществлять эффективное применение различной сменной полезной нагрузки (средств контроля, наблюдения, ретрансляции, поражения и др.), пополнение и накопление запасов электроэнергии различными способами, позволяющими осуществлять эффективное использование БПЛА в любое время суток, имеющего возможность маневрирования по высоте и направлению движения.
Требуемый технический результат достигается тем, что беспилотный летательный аппарат с генерацией электроэнергии имеет эластичный корпус в виде эллипсоида вращения со сквозным осевым отверстием, на верхней поверхности корпуса расположена солнечная батарея, блоки системы спутниковой навигации ГЛОНАСС и блоки системы связи, внутри осевого отверстия в горизонтальной плоскости герметично расположена солнечная батарея, в которой имеется слив в систему сбора дождевой воды. Система сбора дождевой воды, ее хранения и подачи в гидролизер представляет собой емкость, расположенную выше гидролизера, в которой имеется входное отверстие для приема дождевой воды через слив с поверхности солнечной батареи, отверстие стравливания воды при переливании и отверстие, соединенное шлангом с гидролизером. Гидролизер имеет воздушные клапаны настроенные таким образом, что запирают вытекание воды и при увеличении давления газов в процессе выработки у анода кислорода, стравливают его в атмосферу, а собирающийся у катода водород компрессором закачивается в систему сбора и хранения водорода. Система сбора и хранения водорода, в зависимости от потребностей, может накапливать водород в корпусе, увеличивая подъемную силу беспилотного летательного аппарата с возможностью воспроизводства энергоресурсов и при необходимости поставлять его к топливным элементам для производства электроэнергии. С противоположных сторон корпуса расположены воздушно-винтовые электродвигатели, заключенные в защитный кожух для обеспечения горизонтального движения летательного аппарата.
Процессы управления полетом, применения полезной нагрузки, сбора и передачи получаемой информации, генерирование водорода и контроль состояния запасов электроэнергии осуществляет система управления. Устройство крепления сменного модуля полезной нагрузки, расположенное в нижней части, обеспечивает возможность применения различных технических средств и быструю смену полезной нагрузки для выполнения широкого спектра возможных задач. Посадочное устройство представляет собой жестко закрепленные на корпусе дуги, которые позволяют защитить от удара при посадке системы и блоки летательного аппарата.
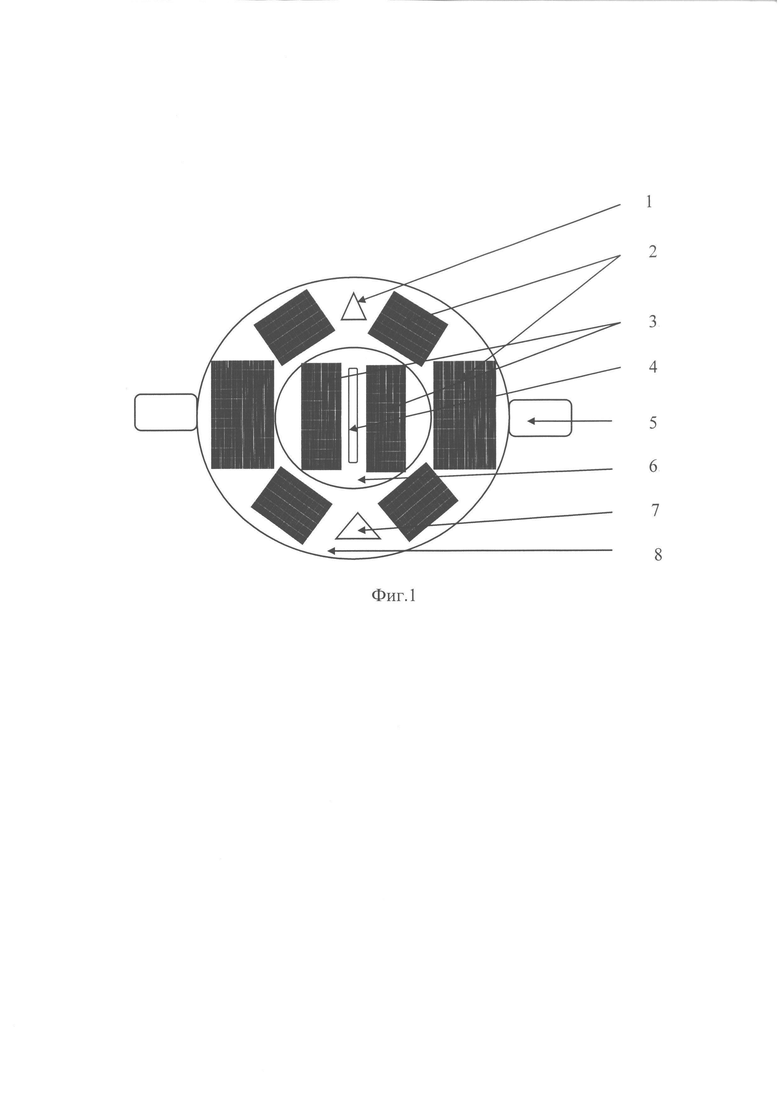
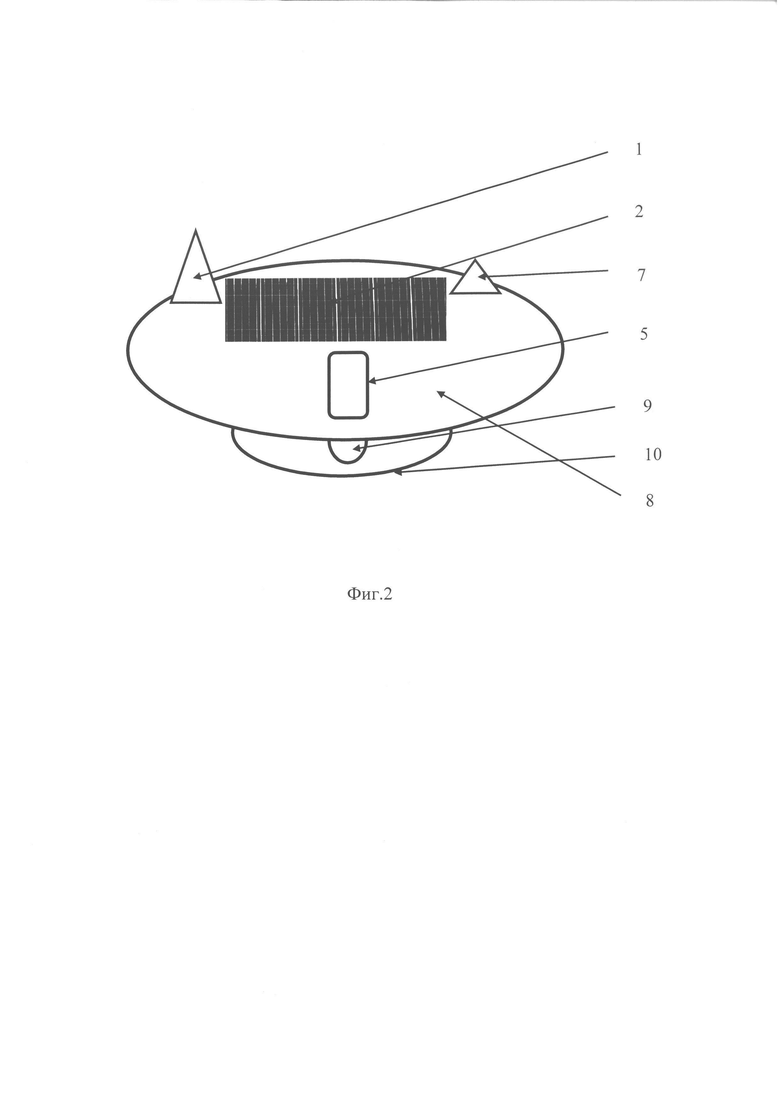
Сущность изобретения поясняется чертежом, где на Фиг. 1 и Фиг. 2 представлена схема беспилотного летательного аппарата с генерацией электроэнергии, где:
1 - блоки системы связи;
2 - солнечные батареи на верхней поверхности корпуса;
3 - солнечные батареи в осевом отверстии;
4 - слив;
5 - электродвигатель;
6 - осевое отверстие;
7 - блоки системы спутниковой навигации ГЛОНАСС;
8 - корпус;
9 - полезная нагрузка;
10 - посадочное устройство.
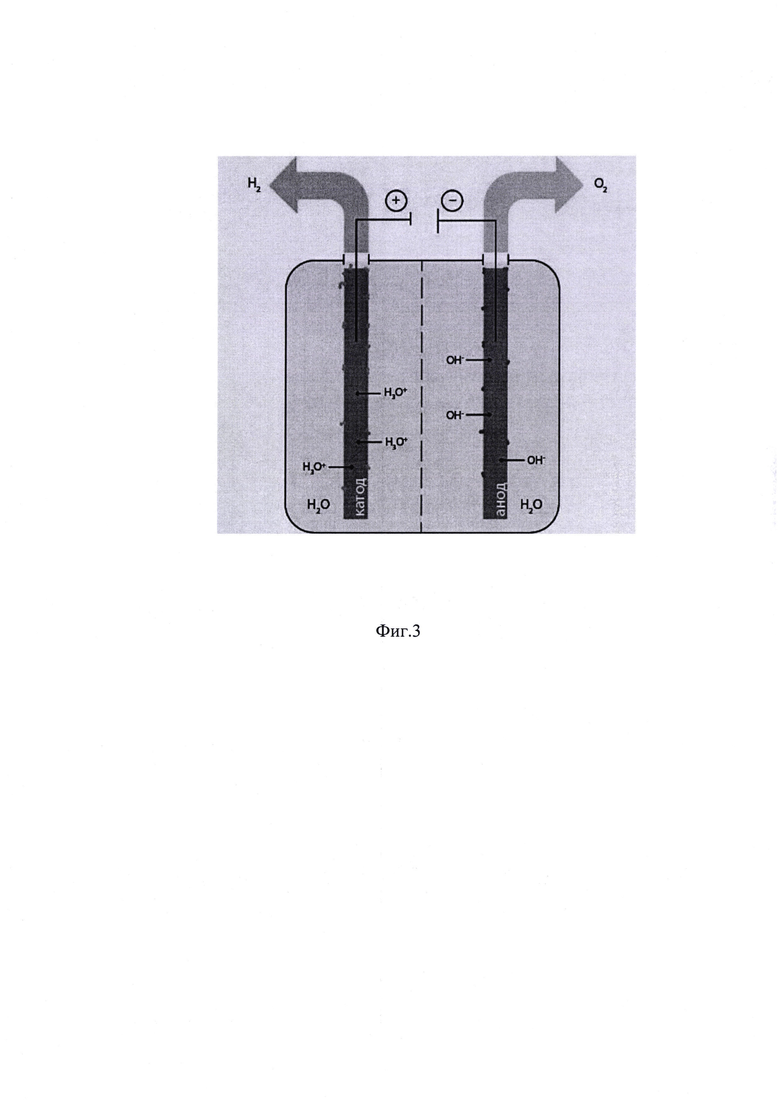
На Фиг. 3 представлена схема электролизера.
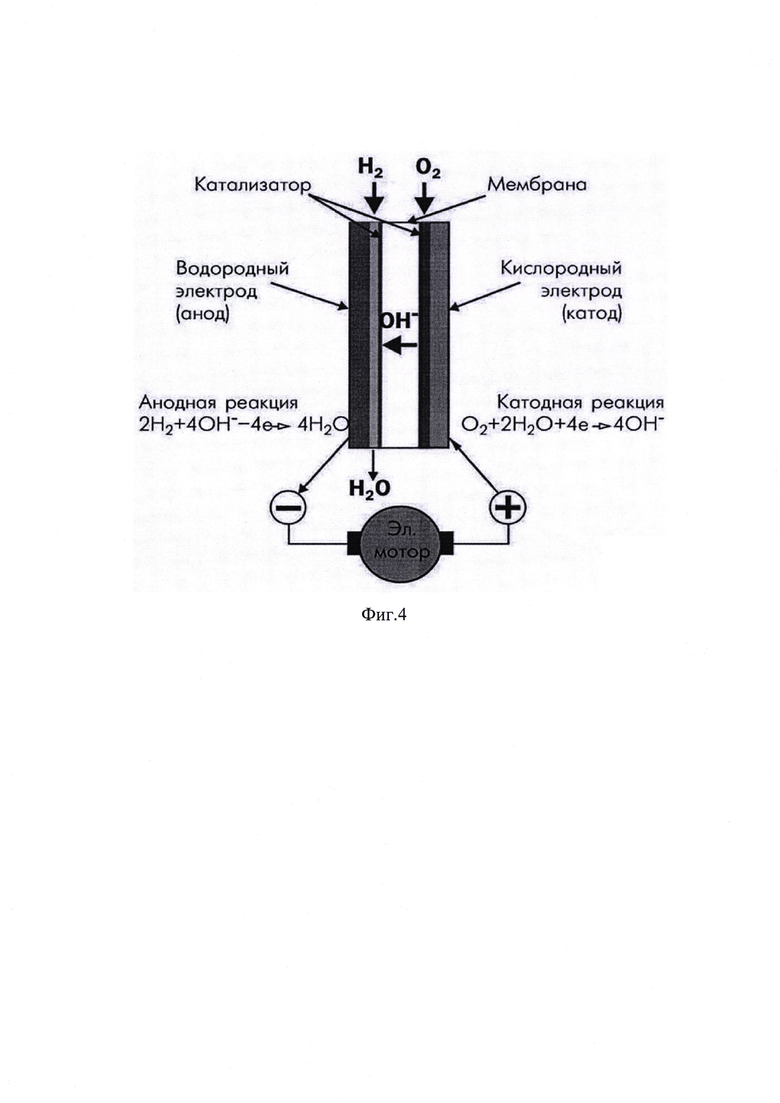
На Фиг. 4 представлена схема водород-кислородного топливного элемента.
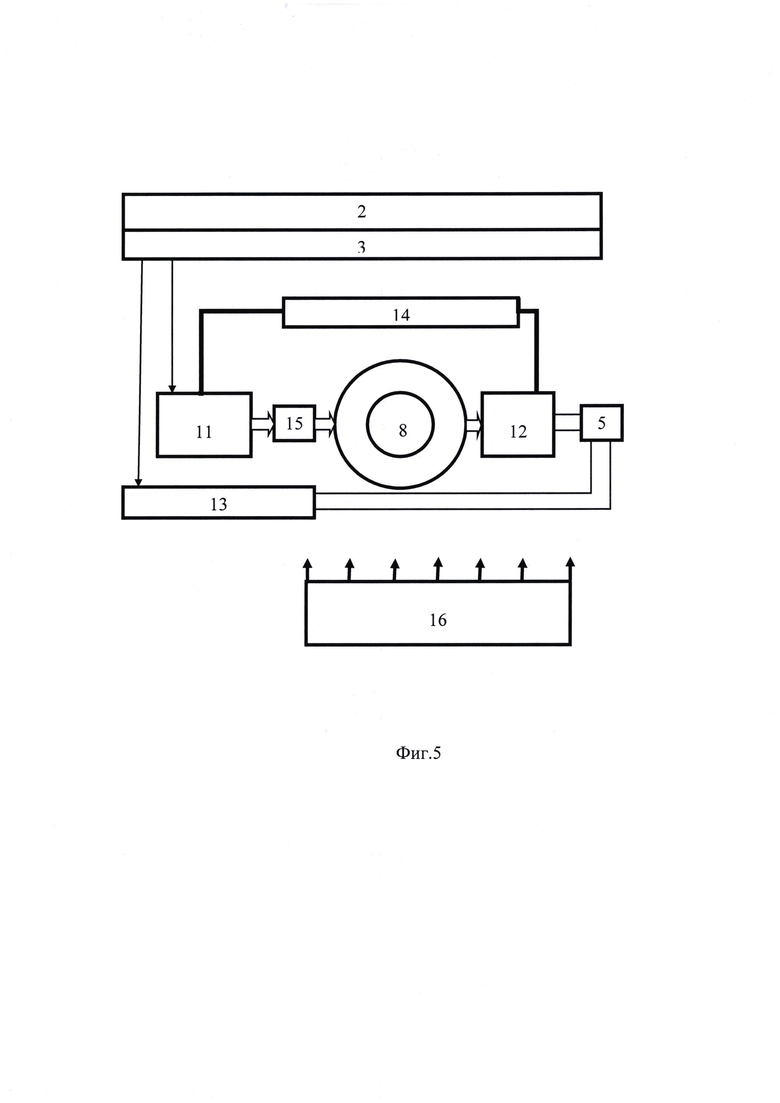
На Фиг. 5 представлена схема работы энергосистемы беспилотного летательного аппарата с генерацией электроэнергии, где:
11 - гидролизер;
12 - топливные элементы;
13 - аккумуляторная батарея;
14 - система сбора, хранения и подачи воды;
15 - компрессор;
16 - система управления.
Изобретение работает следующим образом: при получении определенной задачи проводится предполетная подготовка, во время которой производится зарядка аккумуляторной батареи (13), подключение необходимой сменной полезной нагрузки (9) к устройству крепления, наполняется подъемным газом (водородом) эластичный корпус (8), заполняется водой система сбора, хранения и подачи воды (14) и гидролизер (11). Объем подъемного газа определяется в зависимости от массы беспилотного летательного аппарата с генерацией электроэнергии, массы полезной нагрузки и оптимальной высоты выполнения поставленной задачи. Производится запуск БПЛА.
Горизонтальный полет осуществляется с помощью двух воздушно-винтовых электродвигателей (5), заключенных в защитные кожухи. Направление движения задается изменением тяги каждого электродвигателя (5). В процессе полета с помощью блоков системы спутниковой навигации ГЛОНАСС (7) по команде оператора через систему управления (16) происходит определение места нахождения беспилотного летательного аппарата с генерацией электроэнергии, координаты места посредством блоков системы связи (1) передаются на пункт управления, который командами через систему управления (16) выводит БПЛА в район выполнения поставленной задачи. В процессе полета и для выполнения задачи возможно изменение высоты за счет изменения объема подъемного газа в корпусе (8).
Энергосистема беспилотного летательного аппарата с генерацией электроэнергии позволяет пополнять запасы электроэнергии с помощью солнечных батарей на верхней поверхности корпуса (2) и солнечных батарей в осевом отверстии (3). При обеспечении полного заряда аккумуляторной батареи (13) и всех потребителей электроэнергией, вырабатываемая солнечными батареями (2,3) электроэнергия направляется на гидролизер (11).
В гидролизере (11) под воздействием электрического тока, поданного на электроды, погруженные в воду, происходит реакция гидролиза, в результате которой происходит разделение молекул воды на молекулы водорода и кислорода. Полученный таким образом, у анода кислорода, стравливают его в атмосферу, а собирающийся у катода водород компрессором закачивается в эластичный корпус, если увеличение объема подъемного газа существенно не изменит высоту полета, и не будет мешать выполнению задачи. Объем водорода в корпусе (8) контролируется системой управления (16) с помощью датчиков давления. В условиях отсутствия поступления электроэнергии от солнечных батарей (2,3) и аккумуляторной батареи (13) обеспечение электроэнергией производится за счет работы топливных элементов (12), куда поступает запасенный водород из корпуса (8) и атмосферный кислород. Происходит процесс получения электроэнергии, которая отправляется потребителям, также побочным продуктом является тепло и вода. Тепло может быть использовано для подогрева подъемного газа с целью увеличения его подъемных характеристик. Вода поступает в систему сбора, хранения и подачи воды (14) для дальнейшего использования в гидролизере (11). При попадании беспилотного летательного аппарата с генерацией электроэнергии под воздействия осадков в виде дождя, дождевая вода собирается на поверхности солнечных батарей в осевом отверстии (3) и через слив (4) наполняет систему сбора, хранения и подачи воды (14).
Все процессы, связанные с генерированием электроэнергии и ее использованием, выполняются и контролируются оператором пункта управления через систему управления и имеющиеся средства связи.
После завершения выполнения задачи подъемный газ стравливается из корпуса (8) и БПЛА осуществляет посадку. Для того чтобы не повредить выступающие части полезной нагрузки применяется посадочное устройство, (10) представляющее собой гибкие дуги, которые не мешают использованию полезной нагрузки и демпфируют удары при посадке.
Беспилотный летательный аппарат с генерацией электроэнергии способен длительное время автономно осуществлять эффективное применение различной сменной полезной нагрузки (средств контроля, наблюдения, ретрансляции, поражения и др.). Имея возможность пополнения и накопления запасов электроэнергии различными способами, позволяет осуществлять эффективное использование БПЛА в любое время суток.
| название | год | авторы | номер документа |
|---|---|---|---|
| Беспилотная система мониторинга поверхности земли | 2022 |
|
RU2788553C1 |
| Энергонезависимый многоцелевой беспилотный летательный аппарат | 2020 |
|
RU2741825C1 |
| Многоцелевой беспилотный летательный аппарат | 2021 |
|
RU2763896C1 |
| Аэромобильная система воздушного наблюдения | 2022 |
|
RU2782479C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ЛЕГЧЕ ВОЗДУХА | 2015 |
|
RU2600556C1 |
| Мобильная беспилотная система для воздушного наблюдения и разведки | 2022 |
|
RU2793711C1 |
| Беспилотная система активного противодействия БПЛА | 2017 |
|
RU2669881C1 |
| Беспилотный летательный аппарат для эвакуации раненых и доставки грузов | 2024 |
|
RU2829580C1 |
| БЕСПИЛОТНЫЙ КОМБИНИРОВАННЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2011 |
|
RU2485018C1 |
| Беспилотный летательный аппарат вертолетного типа | 2022 |
|
RU2792460C1 |
Изобретение относится к области авиационной техники, в частности к беспилотным летательным аппаратам (БПЛА) легче воздуха. БПЛА имеет эластичный корпус в виде эллипсоида вращения со сквозным осевым отверстием. На верхней поверхности корпуса расположена солнечная батарея, блоки системы спутниковой навигации ГЛОНАСС и блоки системы связи. Внутри осевого отверстия в горизонтальной плоскости герметично расположена солнечная батарея, в которой имеется слив в систему сбора дождевой воды. Система сбора дождевой воды, ее хранения и подачи в гидролизер представляет собой емкость, расположенную выше гидролизера. Гидролизер имеет воздушные клапаны. С противоположных сторон корпуса расположены воздушно-винтовые электродвигатели. Процессы управления полетом, применения полезной нагрузки, сбора и передачи получаемой информации, генерирование водорода и контроль состояния запасов электроэнергии осуществляет система управления. Устройство крепления сменного модуля полезной нагрузки обеспечивает возможность применения различных технических средств и быструю смену полезной нагрузки для выполнения широкого спектра возможных задач. 5 ил.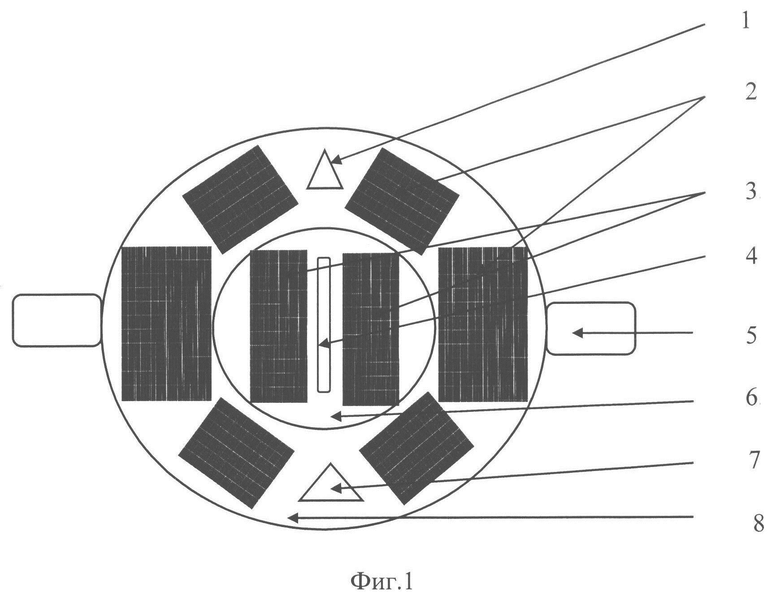
Беспилотный летательный аппарат с генерацией электроэнергии, включающий корпус в виде эллипсоида вращения со сквозным осевым отверстием, солнечной батареей, установленной на верхней поверхности корпуса, аккумуляторной батареей и электродвигателями, отличающийся тем, что корпус выполнен эластичным, сверху его расположены блоки системы спутниковой навигации ГЛОНАСС и блоки системы связи, в осевом отверстии расположена солнечная батарея, имеющая слив в систему сбора, хранения и подачи воды в гидролизер, который соединен через компрессор с системой сбора и хранения водорода и через клапаны с топливными элементами, также имеется система управления, устройство крепления сменного модуля полезной нагрузки и посадочное устройство.
| 0 |
|
SU198620A1 | |
| Энергонезависимый многоцелевой беспилотный летательный аппарат | 2020 |
|
RU2741825C1 |
| Приспособление к прессам для автоматической толчковой подачи листового металла | 1933 |
|
SU32469A1 |
| WO 2018122830 А1, 05.07.2018 | |||
| CN 105947169 А, 21.09.2016. | |||

