Изобретение относится к области беспилотной авиации и может быть использовано при разработке систем беспилотных летательных аппаратов (БПЛА) применяемых при мониторинге земной и водной поверхности, разведке, поиске, в условиях чрезвычайных ситуаций для обеспечения эффективного управления и получения оперативной информации.
Мониторинг с использованием БПЛА применяется для широкого спектра задач во множестве разнообразных сфер человеческой деятельности, включая добычу, переработку и транспортировку природных ресурсов, строительство, промышленность, сельское хозяйство, природоохрану, безопасность и многие другие. Дроны с фотокамерой, тепловизором, мультиспектральной камерой и иным оборудованием позволяют производить регулярный или внеплановый мониторинг оперативно, качественно и точно, в любое время дня и года. Непрерывное наблюдение и наблюдение за протяженными или крупноплощадными объектами, требуют одновременного использования большого количества БПЛА. Поэтому возникает необходимость создание систем БПЛА, такие системы позволят более эффективно использовать возможности задействованных БПЛА и сделают менее сложной систему управления ими.
Известен способ применения беспилотных летательных аппаратов (патент RU 2457531, 2012 г.), основанный на адаптации режимов полета, когда берется п БПЛА, где п>3, образующих в полете так называемую "этажерку", первый БПЛА является ведущим, второй и третий ведомыми, причем ведущий БПЛА занимает нижний высотный эшелон, второй БПЛА -промежуточный, третий - верхний, расстояние ведущего БПЛА от земной поверхности определяется безопасностью полета и безусловного выполнения поставленной задачи, эта высота равна приблизительно 50 м, второй БПЛА выше ведущего еще на 50 м, третий БПЛА выше второго еще на 50 м, при этом второй БПЛА является ретранслятором данных по радиоканалу от первого БПЛА третьему БПЛА, который также по радиоканалу связан с наземной базовой станцией управления, передавая полученные данные наблюдения ведомого БПЛА и получая команды управления полетом или изменения программы полета, при высоте полета третьего БПЛА - 150 м и при принятой длине зоны наблюдения, равной 300 км, верхний третий БПЛА находится в пределах прямой видимости с наземной базовой станцией, что позволяет поддерживать с ним устойчивую связь.
Недостатком этого способа является использование большого количества БПЛА для выполнения задачи, при чем для мониторинга поверхности используется только один, а остальные выполняют функции обеспечивающих.
Известен также беспилотный летательный аппарат для контроля поверхности Земли (патент RU 2776085, 2022 г.), содержащий корпус, электродвижители, панели солнечной батареи, системы наблюдения, связи и автоматического управления, корпус представляет собой платформу с воздухонепроницаемой эластичной оболочкой с травящим клапаном, внутри которой расположены: система управления, включающая в себя информационно-управляющий модуль, блок системы спутниковой навигации ГЛОНАСС, приемо-передающее устройство, аккумуляторную батарею, платформа оборудована крыльями, которые имеют возможность складываться в месте крепления, и фиксируются в сложенном и раскрытом положении, на крыльях размещаются солнечные батареи и имеются вырезы, в которых размешены воздушно-винтовые электродвигатели, к платформе крепится съемный баллон, заполненный подъемным газом под давлением, через клапан соединенный с оболочкой, в нижней части платформы размещена камера оптического и инфракрасного диапазона, защищенная полимерными дугами.
Недостатком этого устройства является то, что в связи с ограниченными размерами и соответственно небольшой массой используемой полезной нагрузки и ограничениями по энерговооруженности отсутствует возможность обработки получаемого изображения, а также и передача больших объемов информации.
Наиболее близкой по технической сущности к заявленному изобретению является комплекс беспилотных летательных средств на базе аэростатического летательного аппарата (патент RU 2681966, 2019 г.), включающий каркас, шасси, мягкие баллоны, заполненные газом легче воздуха, силовую установку с турбовинтовыми двигателями с изменяемым вектором тяги, систему управления и навигации, приспособление для подъема и/или подвески груза, гондолу управления и баки для жидкости, закрепленную на каркасе рамы площадку для посадки квадрокоптеров, дистанционными зарядными устройствами, камерами для мониторинга сельскохозяйственных насаждений.
Недостатком этого устройства является ограниченный запас электроэнегии и отсутствие возможности его пополнения в полете.
Задачей изобретения является создание системы воздушного мониторинга поверхности земли, позволяющей длительное время, на различных высотах осуществлять наблюдение за большими площадями, за большим количеством различных объектов, в том числе и подвижных, их съемку, обработку, хранение и передачу получаемой информации на наземную станцию управления.
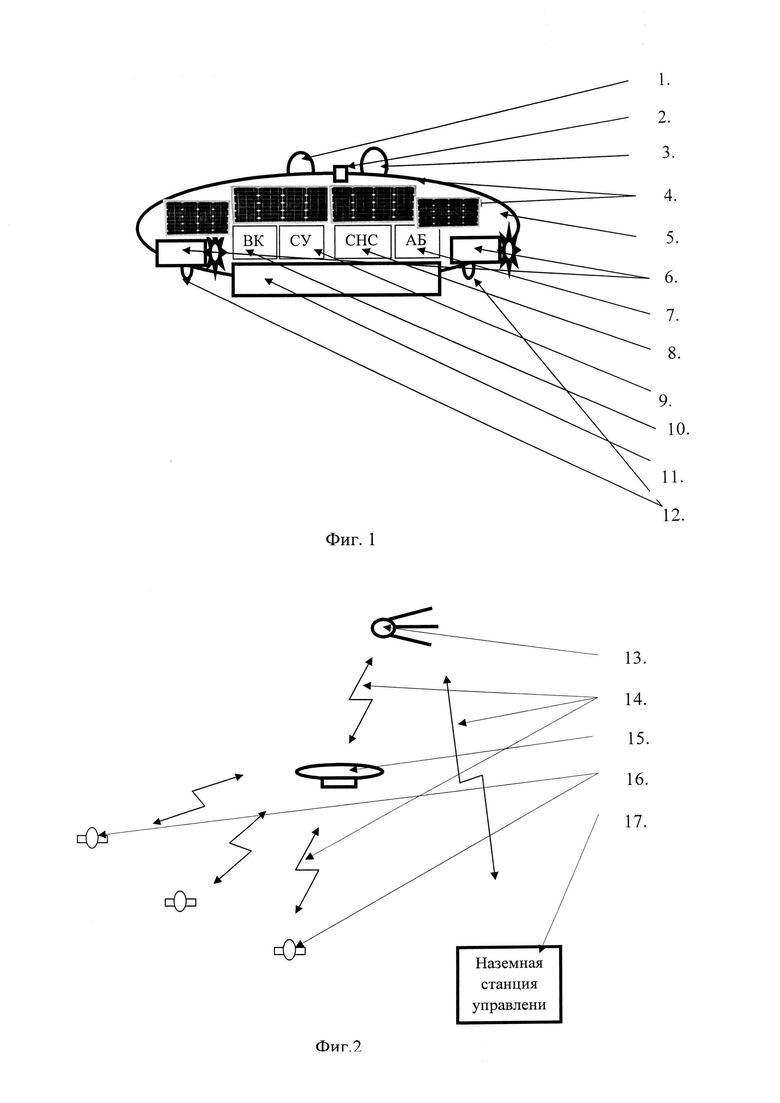
Требуемый технический результат достигается тем, что беспилотная система мониторинга поверхности земли состоит из наземной станции управления, беспилотных летательных аппаратов и беспилотного воздушного пункта управления, представляющего собой дирижабль, имеющий жесткую оболочку, заполненную газом легче воздуха и снабженную травящим клапаном для стравливания подъемного газа при посадке. Сверху оболочка покрыта гибкой солнечной батарей. Внутри оболочки расположены: вычислительный комплекс, система управления, система спутниковой навигации ГЛОНАСС и связи, аккумуляторная батарея. В нижней части, к оболочке крепится отсек для хранения и запуска беспилотных летательных аппаратов и размещаются камеры оптического и инфракрасного диапазона. БПЛА находятся в сложенном состоянии, они представляют собой беспилотные летательные аппараты для контроля поверхности Земли (патент RU 22776085, 2022 г.) состоящие из платформы с воздухонепроницаемой эластичной оболочкой с травящим клапаном, внутри которой расположена система управления, включающая в себя информационно-управляющий модуль, система спутниковой навигации ГЛОНАСС, приемо-передающее устройство, аккумуляторная батарея. БПЛА оборудован крыльями, которые имеют возможность складываться в месте крепления, и фиксируются в сложенном и раскрытом положении, на крыльях размещаются солнечные батареи и имеются вырезы, в которых размешены воздушно-винтовые электродвигатели, к платформе крепится съемный баллон заполненный подъемным газом под давлением через клапан соединенный с оболочкой, в нижней части платформы размещена камера оптического и инфракрасного диапазона защищенная полимерными дугами.
Сущность изобретения поясняется чертежом, на Фиг. 1 представлена беспилотная система мониторинга поверхности земли, где:
1. - антенна системы ГЛОНАСС;
2. - травящий клапан;
3. - антенна спутниковой связи;
4. - солнечная батарея;
5. - жесткая оболочка;
6. - воздушно-винтовые электродвигатели;
7. - аккумуляторная батарея;
8. - система спутниковой навигации ГЛОНАСС и связи;
9. - система управления;
10. - вычислительный комплекс;
11. - отсек для хранения и запуска БПЛА;
12. - камера оптического и инфракрасного диапазона.
На Фиг. 2 представлена схема применения беспилотной системы мониторинга поверхности земли, управления, сбора и передачи информации на наземную станцию управления, где:
13. - космический аппарат;
14. - линии связи;
15. - беспилотный воздушный пункт управления;
16. - беспилотные летательные аппараты;
17. - наземная станция управления.
Изобретение работает следующим образом. Беспилотный воздушный пункт управления (15) при подготовке к выполнению поставленных задач комплектуется набором беспилотных летательных аппаратов (16) для мониторинга поверхности, в которых заранее заложена рабочая высота, в зависимости от давления подъемного газа в присоединенном баллоне. Аналогично можно комбинировать и использование различных средств наблюдения. Беспилотные летательные аппараты (16) размещаются в сложенном виде в отсеке для хранения и запуска БПЛА (11) и закрепляются в устройствах фиксации. Жесткая оболочка (5) заполняется подъемным газом и беспилотный воздушный пункт управления (15) поднимается на рабочую высоту. Рабочая высота беспилотного воздушного пункта управления (15) составляет десятки километров для осуществления устойчивого управления по линиям связи (14) на больших расстояниях. Так же на этой высоте существует возможность максимального использования солнечного излучения для генерации электроэнергии солнечной батареей (4) на внешней верхней поверхности беспилотного воздушного пункта управления (15). Электроэнергия, вырабатываемая солнечной батареей (4), обеспечивает работу всех потребителей, а излишки накапливаются в аккумуляторной батарее (7) для использования в темное время суток. На этой высоте не создается помех для эксплуатации авиации и снижается риск поражения различными средствами ПВО.
Беспилотный воздушный пункт управления (15) осуществляет перелет в район наблюдения, используя воздушно-винтовые электродвигатели (6). Управление скоростью движения и изменение курса осуществляется изменением мощности работы воздушно-винтовых электродвигателей (6). В районе наблюдения беспилотный воздушный пункт управления (15) сохраняет свое положение с помощью системы спутниковой навигации ГЛОНАСС и связи (8).
В зависимости от поставленных при старте и уточненных в полете по средствам связи задач и целей из отсека для хранения и запуска БПЛА (11) осуществляется запуск беспилотных летательных аппаратов (16) в необходимом количестве и с заранее заложенными характеристиками. При дальнейшей эксплуатации возможно изменение количества используемых беспилотных летательных аппаратов (16), запуская из отсека для хранения и запуска БПЛА (11) оставшиеся аппараты. Беспилотные летательные аппараты (16), используя свои средства спутниковой навигации ГЛОНАСС и средства связи и управления, перемещаются для мониторинга объектов и территорий на своей рабочей высоте, составляющей сотни метров. Они могут выполнять свои функции длительное время, пополняя запас электроэнергии от солнечных батарей.
Беспилотные летательные аппараты (16), управляемые наземной станцией управления (17) через беспилотный воздушный пункт управления (15), с устанавливаемой дискретностью осуществляют съемку поверхности с помощью камеры оптического и инфракрасного диапазона, и передают изображение на беспилотный воздушный пункт управления (15) по радиоканалу. Различные варианты дискретности определения места и съемки поверхности устанавливаются исходя из необходимости и запаса электроэнергии на БПЛА.
В дальнейшем с помощью имеющегося в составе беспилотного воздушного пункта управления (15) вычислительного комплекса (10), производится обработка полученной информации, наложение снимков для формирования точного портрета местности и контроля за перемещением объектов в районе наблюдения. Качество полученной визуальной информации контролируется элементами искусственного интеллекта в вычислительном комплексе (10) и при несоответствии установленным параметрам системой управления (9) выдается команда для повторного снятия информации, использованием на различной высоте нескольких беспилотных летательных аппаратов (16) со средствами наблюдения с различными характеристиками. Обработанная информация с помощью системы спутниковой навигации ГЛОНАСС и связи (8), используя антенну спутниковой связи (3), передается через космический аппарат (13) на наземную станцию управления (17).
Использование спутниковых каналов передачи информации и управления беспилотным воздушным пунктом управления (15) позволяет передавать большие объемы информации на большие расстояния с высоким качеством и минимизирует обнаружение передачи и возможности по искажению передаваемой информации или недопущению ее передачи.
После выполнения поставленных задач беспилотный воздушный пункт управления (15) и запущенные им беспилотные летательные аппараты (16), используя собственные средства движения и навигации, возвращаются к месту базирования. В точке посадки система управления (9) формирует команду на открытие травящего клапана (2), подъемный газ стравливается и аппарат совершает посадку. Аналогичным образам осуществляют посадку и беспилотные летательные аппараты (16).
Беспилотная система мониторинга поверхности Земли найдет свое применение в различных сферах деятельности, где необходим не ограниченный по времени и накрывающий значительные площади территории контроль. Например, лесных массивов с целью предупреждения пожаров и оказания помощь при тушении, контроль посевов зерновых и других культур, контроль состояния трубопроводов в малообжитой и труднодоступной местности, контроль дорожного движения в крупных городах, экологическая и другие виды разведок местности.
| название | год | авторы | номер документа |
|---|---|---|---|
| Энергонезависимый многоцелевой беспилотный летательный аппарат | 2020 |
|
RU2741825C1 |
| Беспилотный летательный аппарат с генерацией электроэнергии | 2021 |
|
RU2769036C1 |
| Аэромобильная система воздушного наблюдения | 2022 |
|
RU2782479C1 |
| Многоцелевой беспилотный летательный аппарат | 2021 |
|
RU2763896C1 |
| Мобильная беспилотная система для воздушного наблюдения и разведки | 2022 |
|
RU2793711C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ЛЕГЧЕ ВОЗДУХА | 2015 |
|
RU2600556C1 |
| Многоцелевой комбинированный беспилотный летательный аппарат | 2024 |
|
RU2831435C1 |
| Беспилотная система активного противодействия БПЛА | 2017 |
|
RU2669881C1 |
| Беспилотный летательный аппарат для поражения радиоэлектронных средств противника | 2022 |
|
RU2787694C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ТУШЕНИЯ ПОЖАРОВ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2022 |
|
RU2826399C2 |
Беспилотная система мониторинга поверхности земли содержит наземную станцию управления, беспилотные летательные аппараты, беспилотный воздушный пункт управления, содержащий выполненную определенным образом оболочку, заполненную газом легче воздуха, систему управления, систему спутниковой навигации ГЛОНАСС, систему связи, вычислительный комплекс, камеры наблюдения, солнечную батарею, аккумуляторную батарею, воздушно-винтовые электродвигатели, отсек для хранения в сложенном состоянии и запуска беспилотных летательных аппаратов, камеры оптического и инфракрасного диапазона, расположенное все определенным образом. Обеспечивается увеличение времени и площадей наблюдения, возможность съемки больших количеств объектов, обработки, хранения и передачи получаемой информации на наземную станцую управления. 2 ил.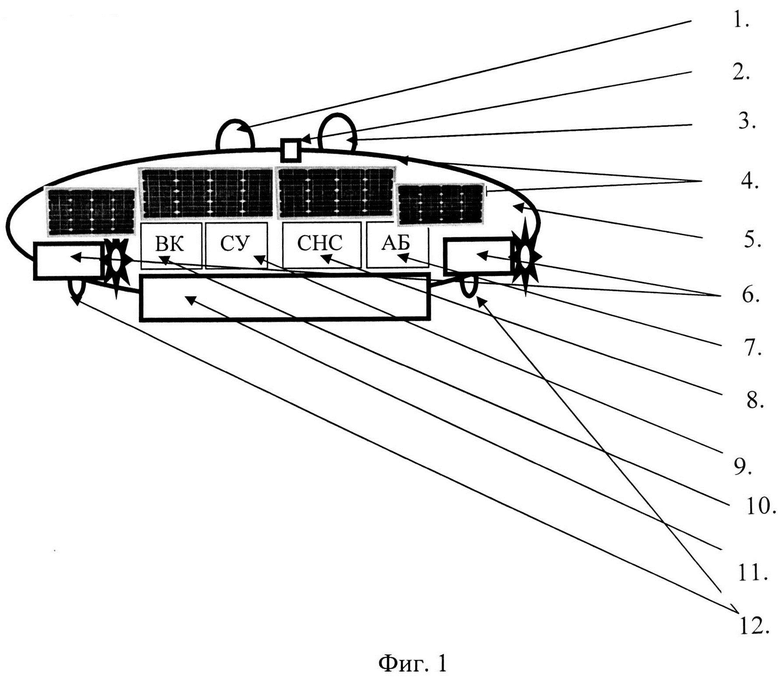
Беспилотная система мониторинга поверхности земли, состоящая из наземной станции управления, беспилотных летательных аппаратов и беспилотного воздушного пункта управления, содержащего оболочку, заполненную газом легче воздуха, двигатели, систему управления и навигации, камеры наблюдения, отличающаяся тем, что оболочка выполнена жесткой с травящим клапаном, в верхней части на нее нанесена гибкая солнечная батарея, внутри оболочки расположены: вычислительный комплекс, система управления, система спутниковой навигации ГЛОНАСС и связи, аккумуляторная батарея, на средней части оболочки расположены воздушно-винтовые электродвигатели, к нижней части оболочки крепится отсек для хранения в сложенном состоянии и запуска беспилотных летательных аппаратов, также размещены камеры оптического и инфракрасного диапазона.
| СПОСОБ ПРИМЕНЕНИЯ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ И УСТРОЙСТВО УПРАВЛЕНИЯ | 2011 |
|
RU2457531C1 |
| Устройство для компенсации нелинейных искажений в усилителях | 1938 |
|
SU57239A1 |
| CN 107914876 A, 17.04.2018 | |||
| CN 107953995 A, 24.04.2018 | |||
| CN 206351780 U, 25.07.2017. | |||

