Изобретение относится к любительскому и спортивному рыболовству, а именно к рыболовным снастям для лова рыбы на мормышку.
Наиболее близким техническим решением (прототипом) является техническое решение по а.с. SU №1717044, A01K 87/00, опубл. 07.03.92 Бюл. № 9, содержащее содержащая корпус из немагнитного материала с источником тока, регулятор частоты и амплитуды колебаний, электромагнит и постоянный магнит, размещенные между собой с зазором, постоянный магнит расположен на свободном конце маятника, установленного шарнирно на оси, смещенной относительно центра масс маятника с образованием двуплечего рычага, имеется хлыстик с укрепленным на его конце приспособлением для пропуска лесы, электромагнит и постоянный магнит расположены в корпусе из немагнитного материала.
Недостатки прототипа: заниженные эксплуатационно-технические характеристики из-за того, что:
1) магнитные оси электромагнита и постоянного магнита соосны между собой, следствием чего является то, что только один магнитный полюс электромагнита участвует в работе, взаимодействуя с постоянным магнитом маятника. При равных параметрах источника питания имеется в два раз меньший размах работы хлыстика ввиду невозможности использования в работе механизма смены направлений тока в обмотке катушки;
2) соосность магнитных осей электромагнита и постоянного магнита вызывает отклонение хлыстика удочки при работе только в одну, причем непредсказуемую, сторону от состояния покоя (только вверх или только вниз);
3) отсутствие микропроцессорного блока управления не позволяет колебательному механизму устройства двигаться плавно и равномерно.
Технической проблемой, решаемой созданием заявленного изобретения является то, что современный человек, нуждающийся в отдыхе от беспрерывного информационного потока, использует рыбалку как своего рода сеанс психотерапии, поэтому ему необходимо современное, удобное, легкое электронное устройство для рыбной ловли, повышенные эксплуатационно-технические характеристики которого позволяют достичь большого улова рыбы при меньшей усталости рыбака.
Техническим результатом заявленного изобретения является создание устройства с повышенными эксплуатационно-техническими характеристиками, в том числе повышенной плавностью хода хлыстика без рывков и пауз, увеличением размаха колебаний хлыстика, точностью позиционирования исполнительного органа, повышенной тишиной работы устройства, а также возможностью задания различных временных режимов работы и возможностью подключения устройства, индикации различных режимов работы удочки.
Технический результат достигается тем, что удочка, характеризующаяся тем, что в корпусе из немагнитного материала расположены источник питания, микропроцессорный блок управления с органамиуправления, блок индикации и электромагнит с магнитопроводом, на оси расположен маятник, на одном конце которого находится постоянный магнит, а на другом - хлыстик, при этом, магнитная ось электромагнита, в состоянии покоя, перпендикулярна магнитной оси постоянного магнита.
Новыми существенными отличительными признаками заявляемого технического решения являются следующие признаки:
- регулятор частоты и амплитуды колебаний выполнен в виде микропроцессорного блока управления;
- магнитные оси электромагнита и постоянного магнита выполнены несоосными между собой.
Совокупность новых существенных отличительных признаков наряду известными из уровня техники признаками достаточна для решения указанной технической проблемы и получения обеспечиваемого изобретение» технического результата - создания устройства с повышенными эксплуатационно-техническими характеристиками, в том числе абсолютной плавностью хода хлыстика без рывков и пауз, увеличенным размахом колебаний, точностью позиционирования исполнительного органа повышенной тишиной работы, а также возможностью задания различных временных режимов работы и возможностью подключения устройств; индикации параметров работы.
Сущность предлагаемого изобретения, его реализуемость и возможности промышленного применения иллюстрируется чертежами (фиг. 1,2,3,4,5,6), где:
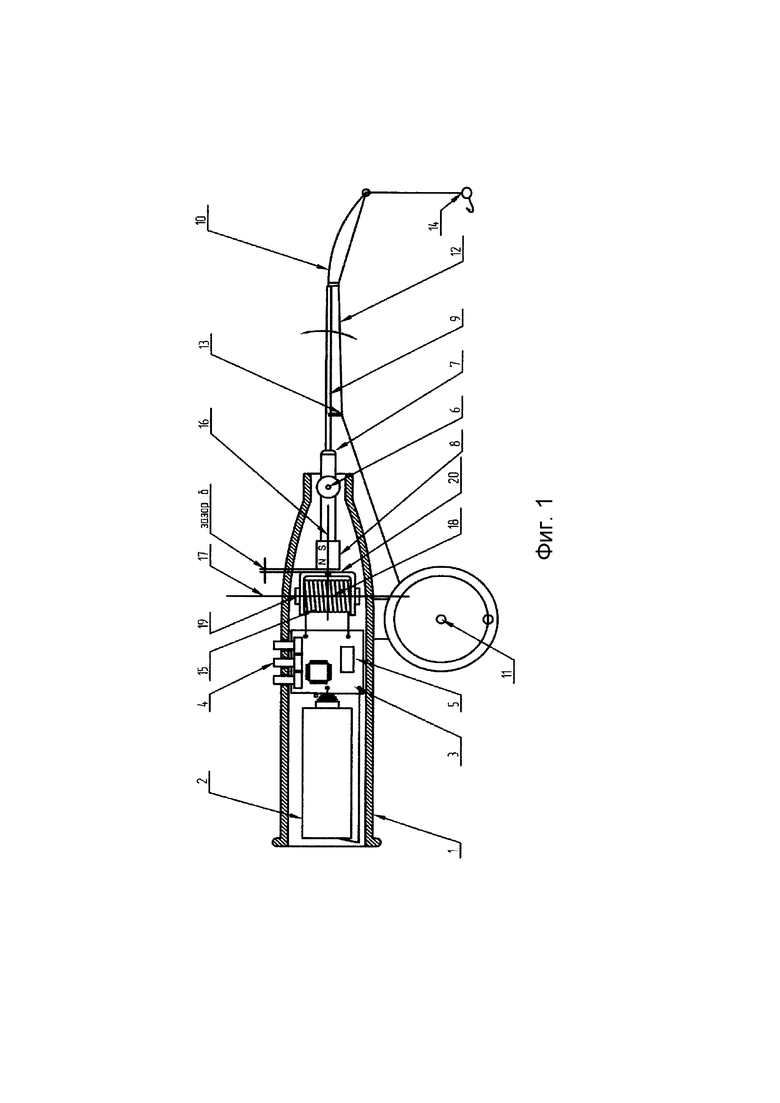
на фиг. 1 - удочка в разрезе;
на фиг. 2 - график работы маятника удочки с мультивибратором (микропроцессорного блока управления);
на фиг. 3 - график работы маятника удочки с микропроцессорным блоков управления;
на фиг. 4 - положение маятника при отсутствии тока на обмотке электромагнита;
на фиг. 5 - положение маятника при наличии тока в обмотке электромагнита;
на фиг. 6 - положение маятника при наличии тока обратной полярности.
На представленных чертежах имеются следующие обозначения:
1 - корпус;
2 - источник тока (питания);
3 - микропроцессорный блок управления;
4 - органы (элементы) управления;
5 - блок индикации параметров устройства;
6 - ось маятника;
7 - маятник;
8 - постоянный магнит;
9 - хлыстик;
10 - сторожок;
11 - катушка;
12 - леска;
13 - узел пропуска лески;
14 - мормышка;
15 - электромагнит;
16 - магнитная ось постоянного магнита;
17 - магнитная ось электромагнита;
18 - обмотка;
19 - сердечник;
20 - магнитопровод.
Удочка (устройство для рыбной ловли) содержит корпус 1 (фиг. 1) из немагнитного материала, в котором расположены: источник питания 2, микропроцессорный блок управления 3 (задающий и регулирующий во времени ток (I) в катушке электромагнита 15 (фиг. 1,4,5,6), имеются органы/элементы 4 (фиг. 1) управления в виде кнопок (например, KLS7-TS6601-11-180) и блок индикации 5 (например, индикатор TOD-5263AMB-N). Также в корпусе 1 на оси 6 (фиг. 1,4,5,6) расположен маятник 7, на одном конце которого расположен постоянный магнит 8, а в другой конец маятника 7 вставлен хлыстик 9 со сторожком 10 (фиг. 1). Намотанная на катушку 11 леска 12 проходит через узлы 13 пропуска лески 12 и сторожок 10, а далее - к привязанной мормышке 14 или к крючку. В качестве микропроцессорного блока 3 управления может использоваться, например, микроконтроллер Attiny 13A.
В корпусе 1 расположен электромагнит 15 (фиг. 1,4,5,6). Магнитная ось 16 (фиг. 1) постоянного магнита 8 (фиг. 1,4,5,6) выполнена несоосной магнитной оси 17 (фиг. 10) электромагнита 15 (фиг. 1,4,5,6), выполненного с обмоткой 18 на сердечнике 19 и магнитопроводом 20. Между магнитопроводом 20 электромагнита 15 и постоянным магнитом 8 имеется воздушный зазор (δ).
Магнитная ось 17 (фиг. 1) электромагнита 15 (фиг. 1,4,5,6) несоосна (в рассматриваемом частном случае применения -перпендикулярна в состоянии покоя) магнитной оси 16 (фиг. 1) постоянного магнита 8 (фиг. 1,4,5,6) при отключенном питании удочки.
Исполнительный орган устройства содержит неподвижный электромагнит 15 с обмоткой 18, сердечником 19 магнитопроводом 20 и подвижную часть устройства, состоящую из маятника 7, качающегося на оси 6 с закрепленным на одном из его концов постоянным магнитом 8.
Три элемента 4 (фиг. 1) управления предназначены для включения, выключения и выбора режимов работы удочки.
Блок индикации 5 позволяет задавать режимы и считывать текущие параметры работы устройства.
При отключенном питании электромагнита 15 (фиг. 1,4,5,6) маятник 7 со вставленным в его гнездо хлыстиком 9 расположен вдоль оси устройства. При подаче питания на электромагнит 15, который меняет свою полярность с определенной частотой и амплитудой, заданной микропроцессорным блоком 3 (фиг. 1) управления, маятник 7 (фиг. 1,4,5,6) со вставленным в него хлыстиком 9 выполняют качающиеся движения вверх-вниз от оси устройства с определенной частотой, равной частоте изменения полярности электромагнита 15, и с определенной амплитудой, заданной силой тока, подаваемой на электромагнит 15.
Устройство работает следующим образом.
При отсутствии тока в электромагните 15 хлыстик 9, расположенный в гнезде маятника 7, находится в положении устойчивого равновесия, взаимодействуя с постоянным магнитом 8 через воздушный зазор (δ) с магнитопроводом 20 электромагнита 15, ориентируясь относительно оси устройства.
Воздействуя на (органы) элементы 4 (фиг. 1) управления микропроцессорного блока 3 управления пользователь задает режимы работы устройства и подает питание на электромагнит 15 (фиг. 1,4,5,6). При этом в сердечнике 19 и магнитопроводе 20 электромагнита 15 образуются магнитные полюса, меняющиеся во времени согласно заданным командам микропроцессорного блока 3 (фиг. 1) управления.
Так как разнополярные полюса магнитопровода 20 (фиг. 1,4,5,6) и постоянного магнита 8 притягиваются, то в результате установленный шарнирно маятник 7 с размещенным в нем постоянным магнитом 8 и хлыстиком 9 поворачиваются на оси 6 на определенный угол (α), который зависит от величины тока и его направления, подаваемого на обмотку электромагнита 15.
Частота качания маятника 7 напрямую зависит от частоты изменения полярности тока, подаваемого на обмотку 18 электромагнита 15, определяемого микропроцессорным блоком 3 (фиг. 1) управления. Величина амплитуды качания маятника 7 (фиг. 1,4,5,6) напрямую зависит от величины и полярности тока, подаваемого на катушку электромагнита 15 и определяемого заданным микропроцессорным блоком 3 (фиг. 1) управления режимом работы устройства.
При отсутствии питания в устройстве, маятник 7 (фиг. 1,4,5,6) будет расположен по центру оси (на фиг. не показана) удочки, т.к. расстояние (воздушный зазор δ - фиг. 1) между постоянным магнитом 8 (фиг. 1,4,5,6) и магнитопроводом 20 электромагнита 15 будет минимальным, а сила притяжения постоянного магнита 8 к магнитопроводу 20 - максимальной.
По мере удаления от оси (на фиг. не показана) удочки, притяжение между магнитопроводом 20 и постоянным магнитом 8 маятника 7 будет ослабевать по нелинейному закону.
Микропроцессорный блок 3 (фиг. 1) управления удочки позволяет создать временную диаграмму устройства, при которой возможно скомпенсировать нелинейность работы электромагнита 15 (фиг. 1,4,5,6) с маятником 7 в связи с неравномерным изменением величины воздушного зазора (δ) между постоянным магнитом 8 маятника 7 и магнитопроводом 20 электромагнита 15 при движении маятника 7.
Микропроцессорный блок 3 (фиг. 1) управления удочки позволяет задать такую форму управления величиной тока на обмотке 18 (фиг. 1,4,5,6) электромагнита 15, при которой маятник 7 будет осуществлять движения плавно и равномерно (см. фиг. 3) согласно заданным командам микропроцессорного блока.
Микропроцессорный блок 3 управления имеет функцию компенсации нелинейности работы исполнительного органа удочки. В заявленном устройстве имеется возможность задания различных режимов работы механизма удочки.
В отличие от прототипа, где магнитные оси электромагнита и постоянного магнита соосны между собой, хлыстик во время работы удочки отклоняется только в одном направлении (например, только вверх от оси удочки/только вниз от оси удочки), то есть отрабатывает только половину возможного периода его колебаний, в предложенном техническом решении магнитная ось электромагнита не соосна (в данном случае применения -перпендикулярна в состоянии покоя) магнитной оси постоянного магнита, поэтому хлыстик отклоняется во время работы удочки вверх и вниз относительно оси устройства (отрабатывает полный возможный период его колебаний), а также обеспечивается точность позиционирования исполнительного органа в зависимости от величины тока, подаваемого на обмотку электромагнита.
В отличие от прототипа, где отсутствует микропроцессорный блок управления, в предложенном техническом решении наличие микропроцессорного блока управления позволяет создать временную диаграмму (фиг. 3) устройства, при которой возможно скомпенсировать нелинейность работы электромагнита и задать такую форму управления величиной тока на катушке электромагнита, при которой колебательный механизм будет двигаться плавно и равномерно согласно командам, выдаваемым микропроцессором, также обеспечивается повышенная тишина работы устройства, имеется возможность задавать различные временные параметры функционирования устройства, а также выводить индикацию работы удочки, корректировать нелинейность магнитной системы, что повышает эксплуатационно-технические характеристики устройства и в т.ч. улучшает игру приманки, расположенной на конце лески, увеличивая вероятность поклевок рыбы.
В отличие от прототипа, где источником электрических колебаний является мультивибратор (релаксационный генератор электрических прямоугольных колебаний с короткими фронтами), и поэтому временная диаграмма силы тока (I) на обмотке электромагнита имеет прямоугольную форму, а следовательно и временной график движения исполнительного органа (маятника) также имеет вид приближенный к прямоугольной форме (фиг. 2), т.е. относительное движение маятника является неравномерным, дерганным, в удочке появляется стук и паразитные колебания, в некоторые моменты времени за один период движения маятник удочки вообще стоит, в предложенном техническом решении процессорный блок управления позволяет задать такую временную диаграмму (фиг. 3) силы тока (I) на обмотке электромагнита, при которой возможно скомпенсировать нелинейность самой магнитной системы и нелинейность зависимости функции величины тока от поворота маятника. Если мультивибратор дает только два значения напряжения (выключено или включено) в течение одного периода движения хлыстика, то микропроцессорный блок управления позволяет выдавать несколько промежуточных значений напряжения, что позволяет регулировать амплитуду движения хлыстика.
Таким образом, наличие новых признаков наряду с известными из уровня техники признаками позволяет предложенному техническому решению (в отличие от прототипа) иметь повышенные эксплуатационно-технические характеристики: достигать абсолютной плавности хода хлыстика без рывков и пауз (Фиг. 3), увеличенного размаха колебаний, точности позиционирования исполнительного органа, повышенной тишины работы, а также имеется возможность задания различных временных режимов работы и возможность использования устройства индикации для визуализации параметров работы устройства.
Осуществление предложенного изобретения позволяет решить заявленную техническую проблему и обеспечить достижение заявленного технического результата.
Предложенное техническое решение, имеющее конструктивное единство, реализует общее функциональное назначение (функциональное единство).
В уровне техники не обнаружен аналог, характеризующийся признаками, идентичными всем существенным признакам заявленного изобретения.
Предложенное техническое решение явным образом не следует из уровня техники. В процессе патентного поиска не выявлены технические решения, совпадающие с его существенными отличительными признаками, следовательно, оно удовлетворяет условию патентоспособности «изобретательский уровень».
Заявитель апробировал (испытал) предложенное устройство в процессе ловли рыбы, что подтвердило назначение, реализуемость и работоспособность, в связи с чем заявленное изобретение соответствует условию патентоспособности «промышленная применимость».
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СИГНАЛИЗАЦИИ ПОКЛЕВКИ | 2010 |
|
RU2437283C1 |
| Удочка | 1989 |
|
SU1717044A1 |
| ЭЛЕКТРОМАГНИТНАЯ ТУРБОУСТАНОВКА | 2000 |
|
RU2182232C2 |
| СПОСОБ ЗАПУСКА МИКРО- И НАНОСПУТНИКОВ И УСТРОЙСТВО НА ОСНОВЕ МИКРОПРОЦЕССОРНОЙ МАГНИТОИНДУКЦИОННОЙ СИСТЕМЫ ДЛЯ ОСУЩЕСТВЛЕНИЯ ЗАПУСКА | 2015 |
|
RU2603441C1 |
| ЭЛЕКТРОМАГНИТНЫЙ КЛАПАН | 2019 |
|
RU2713305C1 |
| Магнитный носитель информации и способ записи информации на магнитный носитель | 1984 |
|
SU1264235A1 |
| ЭЛЕКТРОМАГНИТНЫЙ КЛАПАН (ВАРИАНТЫ) | 2007 |
|
RU2343328C2 |
| КЛАПАННЫЙ РАСПРЕДЕЛИТЕЛЬ | 2011 |
|
RU2451857C1 |
| ЭЛЕКТРОМАГНИТНЫЙ КЛАПАН | 2005 |
|
RU2282771C1 |
| Матричное наборное поле | 1983 |
|
SU1128268A2 |





Изобретение относится к любительскому и спортивному рыболовству, а именно к рыболовным снастям для лова рыбы на мормышку. Удочка, характеризующаяся тем, что в корпусе (1) из немагнитного материала расположены источник питания (2), микропроцессорный блок управления (3) с органами (4) управления, блок индикации (5) и электромагнит (15) с магнитопроводом (20), на оси (6) расположен маятник (7), на одном конце которого находится постоянный магнит (8), а на другом - хлыстик (9), при этом магнитная ось (17) электромагнита (15) в состоянии покоя перпендикулярна магнитной оси (16) постоянного магнита (8). Изобретение обеспечивает плавность и увеличение размаха хода хлыстика без рывков и пауз. 6 ил.
Удочка, характеризующаяся тем, что в корпусе (1) из немагнитного материала расположены источник питания (2), микропроцессорный блок управления (3) с органами (4) управления, блок индикации (5) и электромагнит (15) с магнитопроводом (20), на оси (6) расположен маятник (7), на одном конце которого находится постоянный магнит (8), а на другом - хлыстик (9), при этом магнитная ось (17) электромагнита (15) в состоянии покоя перпендикулярна магнитной оси (16) постоянного магнита (8).
| Удочка | 1989 |
|
SU1717044A1 |
| Удочка для ловли рыбы на мормышку | 1991 |
|
SU1822698A1 |
| US 12035700 B1, 16.07.2024. | |||

