Настоящее изобретение относится к области горной промышленности, в частности к устройствам автоматизированного управления в части позиционирования проходческого комбайна в горной выработке и коронки его исполнительного органа при разрушении горной массы по заданной схеме и формировании контура выработки.
Из существующего уровня техники известно устройство для ориентации проходческого щита, содержащее лазерную мишень, установленную на проходческом щите и источник лазерного излучения, установленный в стартовой шахте (патент Великобритании №2095720 А от 1982 г. по кл. E21D 9/093).
Недостатками данного технического решения являются относительно низкая точность ориентации при проходке криволинейных тоннелей, кроме того, необходимо применение стационарных устройств в выработке для ориентирования машины в пространстве.
Известно устройство для определения положения проходческого щита (патент РФ №2208166 от 28.11.2001 г. по кл. Е21С 35/24 и кл. E21D 9/093)
Недостатком данного технического решения является сложность оптического аппарата, состоящего из собирающей линзы, фотодатчика, модулятора с датчиком нулевого положения, при этом модулятор выполнен в виде двух светонепроницаемых пластин, расположенных под углом друг к другу и необходимость в размещении стационарных устройств в выработке.
Наиболее близким к заявленному техническому решению является система автоматического управления рабочим органом избирательного действия горнопроходческого комплекса (патент РФ №2360111 от 23.03.2007 г. по кл. Е21С35/24)
Недостатком данного технического решения является необходимость в стационарном лазерном излучателе в выработке, фотоприемного устройства, интерфейсного модуля, датчиков положения каждой степени подвижности рабочего органа, что значительно усложняет систему.
Задачами, на решение которых направлено изобретение, являются: установление однозначного местоположения корпуса и коронки исполнительного органа проходческого комбайна в неподвижной системе координат выработки; формирование корректирующего воздействия в систему управления проходческим комбайном для минимизации смещения корпуса относительно продольной оси выработки, минимизации угла поворота корпуса в горизонтальной плоскости и введения ограничивающих углов подъема и поворота стрелы проходческого комбайна.
Данные задачи решаются за счет того, что заявленный способ позиционирования проходческого комбайна и коронки его исполнительного органа, включающий использование системы позиционирования, содержащей два дальномера – левый и правый – с изменяемыми углами наклона измерительного луча по трем осям, закрепленные на левой и правой стенках корпуса проходческого комбайна соответственно, один инклинометр, расположенный в любой части корпуса проходческого комбайна, и один инклинометр, расположенный в любой части корпуса стрелы проходческого комбайна, подключенные через устройство согласования к интеллектуальному модулю управления местоположением проходческого комбайна, включающему блок хранения данных местоположения проходческого комбайна, соединенные с системой управления проходческим комбайном по цифровому интерфейсу RS-485, отличающийся тем, что при перемещении проходческого комбайна производят поочередное измерение расстояния до стоек постоянной крепи горной выработки слева и справа от корпуса проходческого комбайна, перед определением местоположения производят корректировку углов наклона измерительного луча дальномера для сохранения параллельности почвы и плоскости измерения и корректировку угла поворота корпуса проходческого комбайна в плоскости, параллельной почве, по показаниям дальномеров вычисляют координаты корпуса, коронки исполнительного органа и стоек постоянной крепи в неподвижной системе координат горной выработки, определяют смещение проходческого комбайна относительно продольной оси выработки, определяют координаты ограничивающего контура выработки, вычисляют ограничивающие углы подъема и поворота стрелы исполнительного органа проходческого комбайна с учетом смещения и поворота корпуса проходческого комбайна в пространстве выработки.
Техническим результатом является повышение точности позиционирования проходческого комбайна относительно продольной оси выработки, коронки его исполнительного органа с привязкой к неподвижной системе координат выработки, повышение производительности проходческого комбайна, снижение удельных энергозатрат, снижение переборов породы и сохранение ресурса отдельных элементов трансмиссии. Сущность разработанного способа позиционирования проходческого комбайна и коронки его исполнительного органа, включающий использование системы позиционирования, поясняется структурной схемой, на которой изображено:
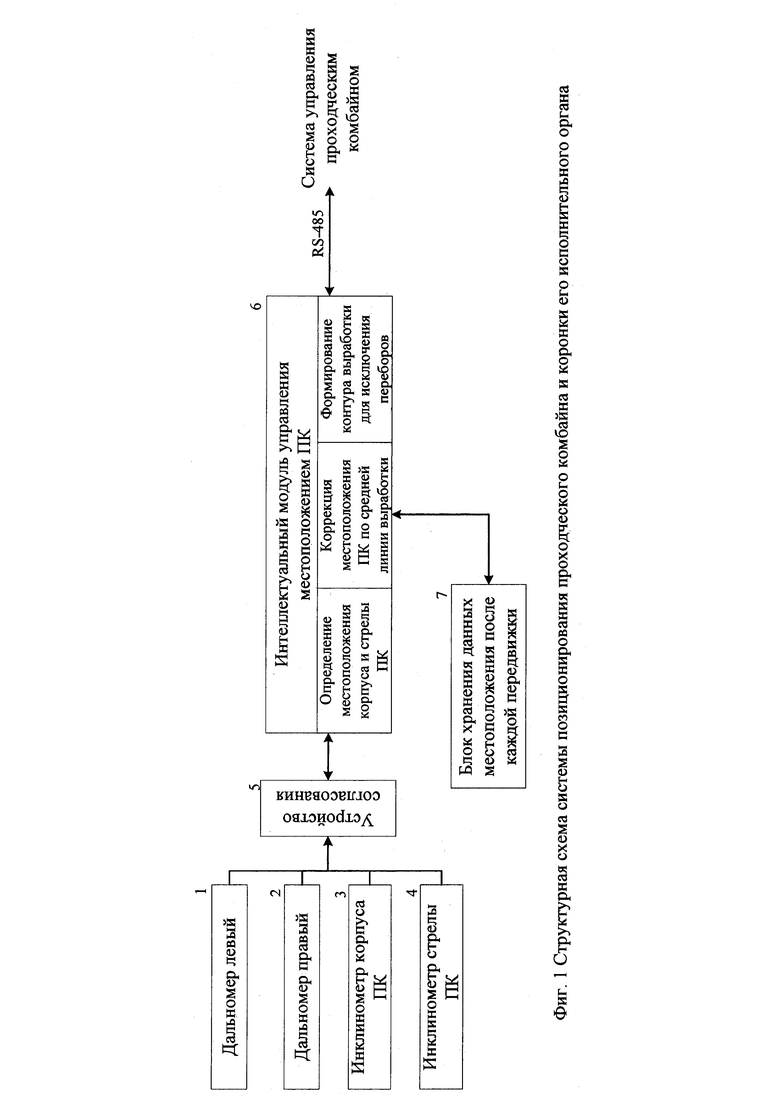
Фиг. 1 Структурная схема системы позиционирования проходческого комбайна и коронки его исполнительного органа
На фиг. 1 представлена структурная схема системы позиционирования проходческого комбайна и коронки его исполнительного органа в составе: 1 - дальномер левый, 2 - дальномер правый, 3 - инклинометр корпуса ПК, 4 - инклинометр стрелы ПК, 5 - устройство согласования, 6 - интеллектуальный модуль управления местоположением ПК, 7 – блок хранения данных местоположения после каждой передвижки.
Работает система следующим образом.
После каждого цикла обработки забоя производится передвижка проходческого комбайна на глубину зарубки исполнительного органа. При этом определяется местоположение проходческого комбайна в системе координат выработки.
Поставленная задача позиционирования проходческого комбайна в выработке решаются путем введения в систему позиционирования трех устройств: двух дальномеров – левого и правого – с изменяемым углом наклона измерительного луча, расположенных на левой и правой стенке корпуса проходческого комбайна соответственно, и цифрового трех-осевого инклинометр корпуса ПК, расположенного в любой части корпуса. Основным блоком системы является Интеллектуальный модуль управления местоположением проходческого комбайна. Устройство согласования играет роль концентратора. Система позиционирования питается от штатного источника питания аппаратуры управления проходческим комбайном.
Алгоритм работы дальномера представляет собой циклическое выполнение последовательных операций после передвижки проходческого комбайна, состоит из двух этапов. На первом этапе выполнения алгоритма происходит выставление плоскости измерения параллельно почве. Для этого на выходе инклинометр корпуса ПК формируются значения углов наклона корпуса комбайна по осям XYZ в цифровом виде. Данные выдаются в устройство согласования для первичной обработки и формирования общего пакета данных. Блок согласования передает данные от инклинометра корпуса ПК о наличии углов наклона корпуса относительно осей XYZ неподвижной системы координат выработки. По рассогласованию показаний инклинометра корпуса ПК с заданными значениями интеллектуальный модуль управления местоположением проходческого комбайна выдает корректирующее воздействие на шаговые двигатели привода управления положением дальномера. По данным инклинометра определяется также угол поворота корпуса проходческого комбайна. Интеллектуальный модуль управленияместоположением проходческого комбайна выдает корректирующее воздействие в систему управления проходческим комбайном. Корректировка угла поворота корпуса комбайна производится при превышении заданного угла поворота.
На втором этапе после корректировки углов наклона луча левого и правого дальномера производится от четырех до восьми измерений расстояния до стоек постоянной крепи. Измерение расстояния производится с угловым шагом, соответствующим шагу крепления выработки. Количество измерений и шаг установки стоек крепления выработки задается настройками системы до начала работы. Измеренные значения расстояния и соответствующие им углы поворота луча левого и правого дальномера передаются в устройство согласования и передачи данных и далее по согласованному протоколу в интеллектуальный модуль управления местоположением проходческого комбайна.
Интеллектуальный модуль управления местоположением проходческого комбайна по полученным данным от левого и правого дальномеров определяет расстояние от продольной оси выработки до каждой стойки крепи по нормали. При этом вычисляются координаты каждой стойки крепи в неподвижной системе координат выработки, положение средней линии выработки, смещение проходческого комбайна относительно продольной оси выработки, ширина выработки по стойкам крепи. По окончании вычислений присваиваются номера стойкам крепи, и все полученные данные заносятся в базу данных, которая находится в блоке хранения данных местоположения.
При превышении смещения проходческого комбайна относительно продольной оси выработки заданного значения интеллектуальный модуль управления местоположением проходческого комбайна выдает по цифровому интерфейсу RS 485 команду в штатную систему управления проходческим комбайном на изменение местоположения проходческого комбайна в выработке с учетом смещения и поворота корпуса в плоскости почвы выработки.
Задача позиционирования коронки исполнительного органа проходческого комбайна и задания контура выработки решается введением дополнительного инклинометра стрелы ПК, который размещается на корпусе стрелы исполнительного органа и подключается к устройству согласования. Данные о наклоне стрелы исполнительного органа по трем осям передаются через устройство согласования в интеллектуальный модуль управления местоположением проходческого комбайна, который производит пересчет углов наклона в координаты основания коронки исполнительного органа в неподвижной системе координат выработки. После этого производится расчет ограничивающих углов подъема и поворота стрелы исполнительного органа. Конструктивные параметры проходческого комбайна и форма выработки задаются в настройках системы до начала работы.
По результатам вычислений интеллектуальный модуль управления местоположением проходческого комбайна формирует команду на отключение подачи исполнительного органа в горизонтальной плоскости при превышении угла поворота стрелы для исключения выхода коронки за ограничительный контур выработки и для минимизации переборов породы.
После передвижки проходческого комбайна цикл повторяется.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического управления исполнительным органом проходческого комбайна избирательного действия | 1986 |
|
SU1330311A1 |
| Способ проходки горной выработки и устройство для его осуществления | 2018 |
|
RU2689455C1 |
| ПРОХОДЧЕСКИЙ КОМБАЙН | 1997 |
|
RU2131030C1 |
| Платформа-крепеподъемник | 2018 |
|
RU2708130C1 |
| ИСПОЛНИТЕЛЬНЫЙ ОРГАН ПРОХОДЧЕСКОГО КОМБАЙНА | 2010 |
|
RU2455486C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ ИЗБИРАТЕЛЬНОГО ДЕЙСТВИЯ ГОРНОПРОХОДЧЕСКОГО КОМПЛЕКСА | 2007 |
|
RU2360111C2 |
| Система позиционирования проходческого комплекса в пространстве | 2019 |
|
RU2733256C1 |
| ПРОХОДЧЕСКО-ОЧИСТНОЙ КОМПЛЕКС | 1998 |
|
RU2143068C1 |
| УСТРОЙСТВО РЕГУЛИРОВАНИЯ СКОРОСТИ ПОДАЧИ СТРЕЛОВИДНОГО ИСПОЛНИТЕЛЬНОГО ОРГАНА ПРОХОДЧЕСКОГО КОМБАЙНА | 2011 |
|
RU2464420C1 |
| Стреловидный исполнительный орган проходческого комбайна | 1976 |
|
SU613099A1 |
Изобретение относится к области горной промышленности, в частности к позиционированию проходческого комбайна в горной выработке и коронки его исполнительного органа. Способ позиционирования проходческого комбайна и коронки его исполнительного органа включает использование системы позиционирования, содержащей два дальномера - левый и правый - с изменяемыми углами наклона измерительного луча по трем осям, закрепленные на левой и правой стенках корпуса проходческого комбайна соответственно. Один инклинометр расположен в любой части корпуса проходческого комбайна, и один инклинометр расположен в любой части корпуса стрелы проходческого комбайна, подключенные через устройство согласования к интеллектуальному модулю управления местоположением проходческого комбайна, включающему блок хранения данных местоположения проходческого комбайна, соединенные с системой управления проходческим комбайном по цифровому интерфейсу RS-485. При перемещении проходческого комбайна производят поочередное измерение расстояния до стоек постоянной крепи горной выработки слева и справа от корпуса проходческого комбайна. Перед определением местоположения производят корректировку углов наклона измерительного луча дальномера для сохранения параллельности почвы и плоскости измерения и корректировку угла поворота корпуса проходческого комбайна в плоскости, параллельной почве. По показаниям дальномеров вычисляют координаты корпуса, коронки исполнительного органа и стоек постоянной крепи в неподвижной системе координат горной выработки. Определяют смещение проходческого комбайна относительно продольной оси выработки, определяют координаты ограничивающего контура выработки, вычисляют ограничивающие углы подъема и поворота стрелы исполнительного органа проходческого комбайна с учетом смещения и поворота корпуса проходческого комбайна в пространстве выработки. Достигается технический результат – повышение точности позиционирования проходческого комбайна относительно продольной оси выработки, коронки его исполнительного органа с привязкой к неподвижной системе координат выработки. 1 ил.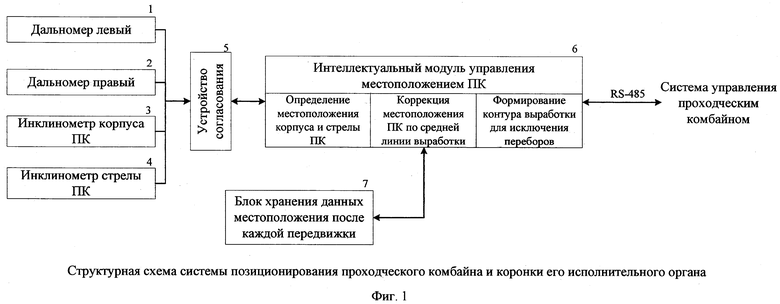
Способ позиционирования проходческого комбайна и коронки его исполнительного органа, включающий использование системы позиционирования, содержащей два дальномера - левый и правый - с изменяемыми углами наклона измерительного луча по трем осям, закрепленные на левой и правой стенках корпуса проходческого комбайна соответственно, один инклинометр, расположенный в любой части корпуса проходческого комбайна, и один инклинометр, расположенный в любой части корпуса стрелы проходческого комбайна, подключенные через устройство согласования к интеллектуальному модулю управления местоположением проходческого комбайна, включающему блок хранения данных местоположения проходческого комбайна, соединенные с системой управления проходческим комбайном по цифровому интерфейсу RS-485, отличающийся тем, что при перемещении проходческого комбайна производят поочередное измерение расстояния до стоек постоянной крепи горной выработки слева и справа от корпуса проходческого комбайна, перед определением местоположения производят корректировку углов наклона измерительного луча дальномера для сохранения параллельности почвы и плоскости измерения и корректировку угла поворота корпуса проходческого комбайна в плоскости, параллельной почве, по показаниям дальномеров вычисляют координаты корпуса, коронки исполнительного органа и стоек постоянной крепи в неподвижной системе координат горной выработки, определяют смещение проходческого комбайна относительно продольной оси выработки, определяют координаты ограничивающего контура выработки, вычисляют ограничивающие углы подъема и поворота стрелы исполнительного органа проходческого комбайна с учетом смещения и поворота корпуса проходческого комбайна в пространстве выработки.
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ ИЗБИРАТЕЛЬНОГО ДЕЙСТВИЯ ГОРНОПРОХОДЧЕСКОГО КОМПЛЕКСА | 2007 |
|
RU2360111C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ПРОХОДЧЕСКОГО ЩИТА | 2001 |
|
RU2208166C1 |
| Система позиционирования проходческого комплекса в пространстве | 2019 |
|
RU2733256C1 |
| Устройство для контроля положения горной машины | 1980 |
|
SU1075990A3 |
| Устройство управления положением рабочего органа проходческого комбайна относительно заданного профиля | 1981 |
|
SU1329627A3 |
| WO 2016177387 A1, 10.11.2016 | |||
| EP 3094807 B1, 16.10.2019. | |||

