Изобретение относится к области горной промышленности, в конкретном случае к устройствам для определения координат и пространственного положения проходческих комплексов малых диаметров, состоящих из нескольких модулей, при строительстве прямолинейных и криволинейных тоннелей, в том числе при строительстве прямолинейных и криволинейных тоннелей методом продавливания тоннельной крепи.
Известно устройство для определения пространственных координат проходческого щита [Патент РФ №2405937], содержащее оптический задатчик направления (лазерный приемо-передатчик), устанавливаемый в стартовой шахте, фотоприемный блок (приемная фотомишень), закрепленный на проходческом щите блок управления оптическим задатчиком, блок согласования сигналов, микроконтроллер, дешифратор, модуль фонового опроса матрицы, шинные формирователи, блок формирования сигнала прерывания, коммутатор, электроприводы, блок управления оптическим передатчиком, оптический передатчик, фотоприемное устройство.
Недостатком данного устройства является отсутствие возможности определения координат проходческого щита при криволинейной проходке методом продавливания крепи.
Известна следящая система управления щитом тоннелепроходческого комплекса [Патент РФ №2509892], содержащая последовательно соединенные оптический задатчик направления (лазерный приемопередатчик), блок отклонения луча, диафрагму, фотоэлектрическое приемное устройство (приемная фотомишень), и блок управления, вход которого также соединен с блоком измерения углов наклона, отличающаяся тем, что в нее введен дополнительный блок наблюдателя состояния, своим входом соединенный с блоком измерения углов наклона, а выходом с блоком управления по четырем координатам.
Недостатком данного устройства является отсутствие возможности определения координат проходческого щита при криволинейной проходке методом продавливания крепи ввиду отсутствия технической возможности обеспечить прямую видимость между оптическим задатчиком направления и фотоэлектрическим приемным устройством при неподвижной фиксации оптического задатчика направления.
Наиболее близким техническим решением является устройство для ориентации проходческого комплекса при строительстве криволинейных тоннелей [Патент РФ №2385418], содержащее источник опорного лазерного излучения (лазерный приемо-передатчик), установленный в стартовой шахте, лазерную мишень (приемная фотомишень), установленную на проходческом комплексе, промежуточные лазерные модули (промежуточные лазерные приемо-передатчики), установленные на расстоянии друг от друга в пределах обеспечения прямой видимости в возведенной части тоннеля, которые содержат двухкоординатный инклинометр, лазерный ротационный нивелир и регистратор лазерного излучения, при этом платформа выполнена с возможностью колебательного движения вокруг горизонтальной оси, перпендикулярной оси тоннеля и каналы передачи данных между блоками системы управления устройства и компьютером с монитором.
К недостаткам данного устройства можно отнести невозможность определения координат и пространственного местоположения первого (головного) модуля проходческого комплекса, состоящего из нескольких модулей.
Проблема, на решение которой направлено заявляемое изобретение, заключается в обеспечении возможности определения координат и пространственного положения проходческих комплексов модульной конструкции при строительстве как прямолинейных, так и криволинейных тоннелей, в том числе методом продавливания.
Проблема решается путем использования системы позиционирования проходческого комплекса в пространстве, состоящей из лазерного приемопередатчика, закрепленного в стартовой шахте, одного или более промежуточных лазерных приемо-передатчиков, установленных на расстоянии друг от друга в пределах обеспечения прямой видимости в возведенной части тоннеля, и приемной фотомишени, установленной на проходческом комплексе соединенных между собой проводным интерфейсом связи через интерфейсные модули, при этом лазерный приемопередатчик и промежуточные лазерные приемо-передатчики выполнены идентично и содержат платформу, с размещенными на ней лазерным излучателем и лазерным дальномером. При этом платформа выполнена с возможностью вращения вокруг горизонтальной и вертикальной осей, за счет электроприводов с обратной связью, а приемная фотомишень, устанавливается в каждом модуле проходческого комплекса и выполнена с возможностью определения пространственного положения модулей проходческого комплекса.
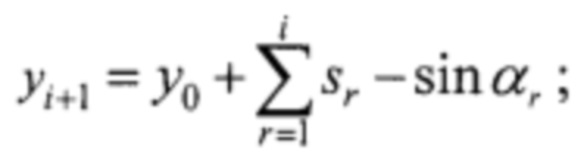
На фиг. 1 представлена структурная схема системы позиционирования проходческого комплекса в пространстве.
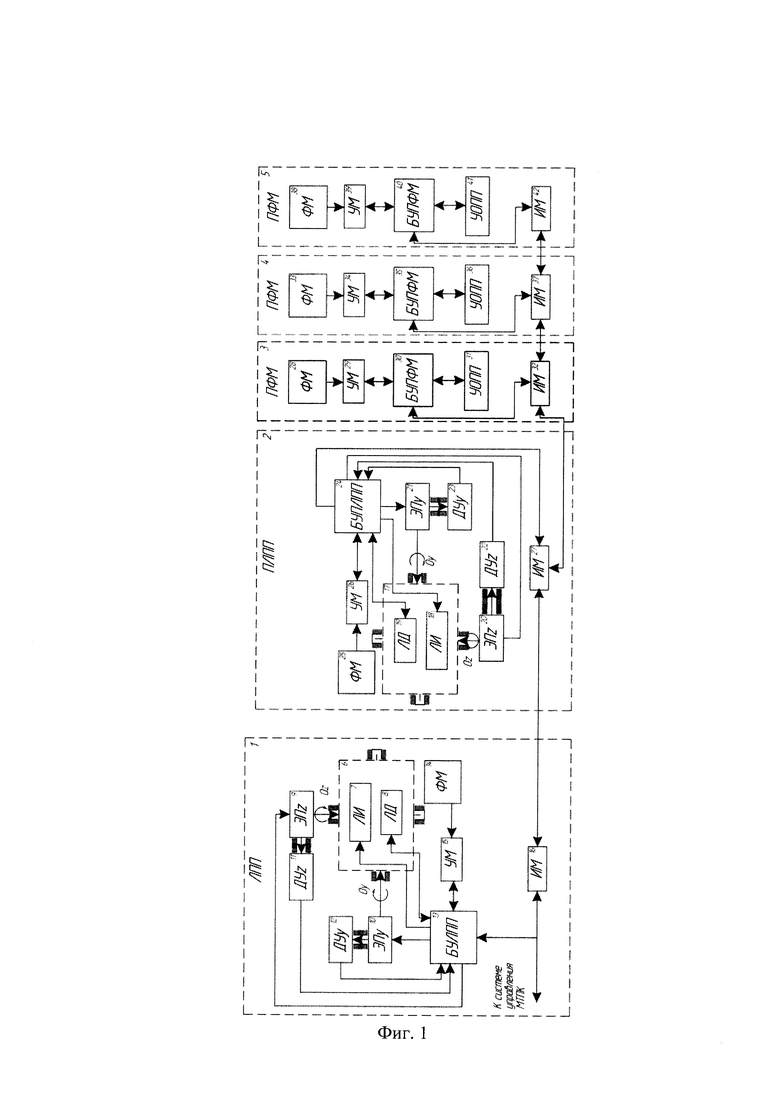
На фиг. 2 представлена схема размещения элементов системы позиционирования в тоннеле.
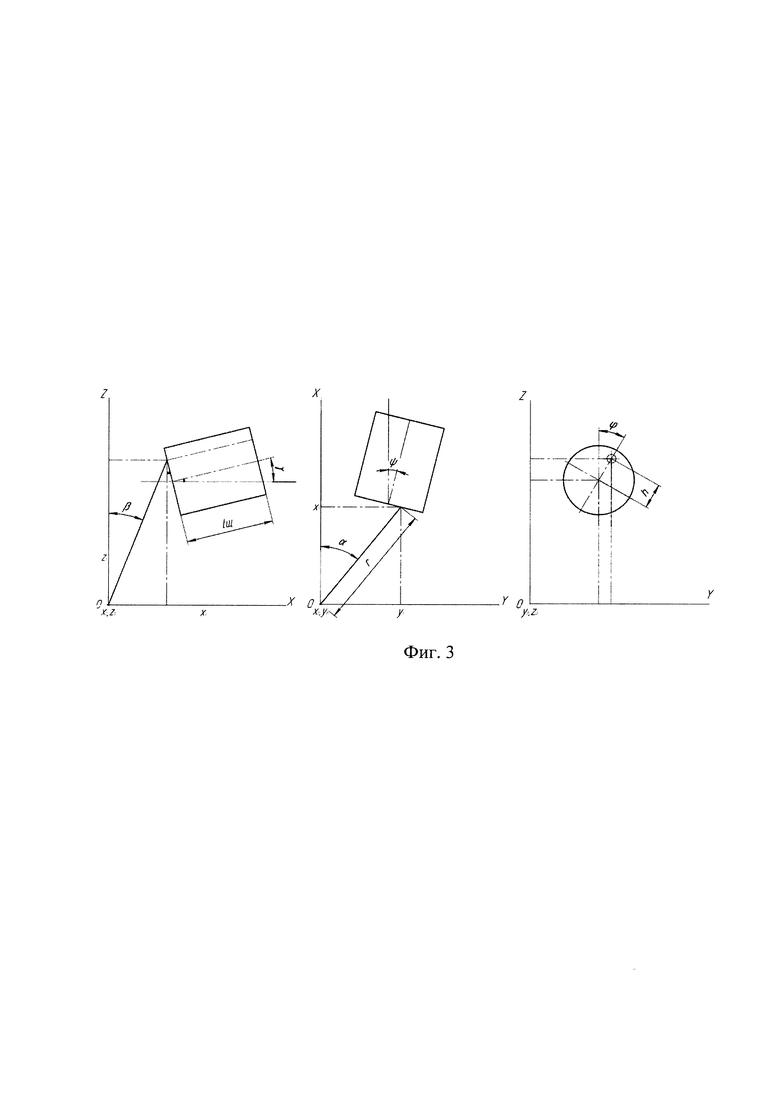
На фиг. 3. представлены иллюстрации, поясняющие принцип определения координат.
Система позиционирования проходческого комплекса в пространстве содержит лазерный приемо-передатчик (ЛПП) 1 (Фиг. 1), один или более промежуточных лазерных приемо-передатчиков (ПЛПП) 2, три приемные фотомишени (ПФМ) 3, 4, 5, последовательно соединенные проводным интерфейсом связи.
Лазерный приемо-передатчик (ЛПП) 1 содержит платформу 6 с размещенными на ней лазерным излучателем (ЛИ) 7 и лазерным дальномером (ЛД) 8, электрический привод вращения в вертикальной плоскости (ЭПz) 9, электрический привод вращения в горизонтальной плоскости (ЭПу) 10, датчик угла поворота в вертикальной плоскости (ДУz) 11, датчик угла поворота в горизонтальной плоскости (ДУу) 12, блок управления лазерным приемо-передатчиком (БУЛПП) 13, фотоматрицу (ФМ) 14, состоящую из фотодиодов (на фиг. не показаны), расстояние между которыми соответствует диаметру лазерного луча (ЛИ) 7, устройство мультиплексирования (УМ) 15, интерфейсный модуль (ИМ) 16. Фотоматрица (ФМ) 14 электрически связана с устройством мультиплексирования (УМ) 15, которое соединено с блоком управления лазерным приемо-передатчиком (БУЛПП) 13. Платформа 6 выполнена с возможностью вращения вокруг горизонтальной оси Оу и вертикальной оси Oz за счет механической связи с ЭПу 9 и ЭПz 10, при этом лазерный излучатель (ЛИ) 7 и лазерный дальномер (ЛД) 8, расположенные на платформе 6, связаны с БУЛПП 13. Один выход БУЛПП 13 соединен с ЭПу 9 механически соединенным с ДУу 11, выход которого соединен с входом БУЛПП 13, а другой выход БУЛПП 13 соединен с ЭПz 10 механически связанным с ДУz 12, выход которого соединен с входом БУЛПП 13. Интерфейсный модуль (ИМ) 16 соединен с БУЛПП 13.
Промежуточный лазерный приемо-передатчик (ПЛПП) 2 имеет конструкцию аналогичную лазерному приемо-передатчику 1 и содержит платформу 17, с размещенными на ней лазерным излучателем (ЛИ) 18 и лазерным дальномером (ЛД) 19, электрический привод вращения в вертикальной плоскости (ЭПz) 20, электрический привод вращения в горизонтальной плоскости (ЭПу) 21, датчик угла поворота в вертикальной плоскости (ДУz) 22, датчик угла поворота в горизонтальной плоскости (ДУу) 23, блок управления лазерным приемо-передатчиком (БУЛПП) 24, фотоматрицу (ФМ) 25, состоящую из фотодиодов (на фиг. не показаны), расстояние между которыми соответствует диаметру лазерного луча (ЛИ) 7, устройство мультиплексирования (УМ) 26, интерфейсный модуль (ИМ) 27. Фотоматрица (ФМ) 25 электрически связана с устройством мультиплексирования (УМ) 26, которое соединено с блоком управления лазерным приемо-передатчиком (БУЛПП) 24. Платформа 17 выполнена с возможностью вращения вокруг горизонтальной оси Оу и вертикальной оси Oz за счет механической связи с ЭПу 21 и ЭПz 20, при этом лазерный излучатель (ЛИ) 18 и лазерный дальномер (ЛД) 19, расположенные на платформе 17, связаны с БУЛПП 24. Один выход БУЛПП 24 соединен с ЭПу 21 механически соединенным с ДУу 23, выход которого соединен со входом БУЛПП 24, а другой выход БУЛПП 24 соединен с ЭПz 20 механически связанным с ДУz 22, выход которого соединен со входом БУЛПП 24. Интерфейсный модуль (ИМ) 27 соединен с БУЛПП 24. Лазерный приемопередатчик (ЛПП) 1 и промежуточный лазерный приемо-передатчик (ПЛПП) 2 последовательно соединены проводным интерфейсом связи через интерфейсный модуль (ИМ) 27 и интерфейсный модуль (ИМ) 16.
Приемная фотомишень (ПФМ) 3, имеет в своем составе фотоматрицу (ФМ) 28, устройство мультиплексирования (УМ) 29, блок управления приемной фотомишенью (БУПФМ) 30, устройство определения пространственного положения (УОПП) 31 и интерфейсный модуль (ИМ) 32. Устройство определения пространственного положения (УOПП) 31 содержит трехосевой гироскоп (на фиг. не показан), трехосевой магнитный датчик (на фиг. не показан) и трехосевой акселерометр (на фиг. не показан), Фотоматрица (ФМ) 28 электрически связана с устройством мультиплексирования (УМ) 29, которое соединено с блоком управления приемной фотомишенью (БУПФМ) 30, с которым также связано устройство определения пространственного положения (УОПП) 31, при этом интерфейсный модуль (ИМ) 32 связан с блоком управления приемной фотомишенью (БУПФМ) 30. Приемная фотомишень (ПФМ) 3 и промежуточный лазерный приемо-передатчик (ПЛПП) 2 последовательно соединены проводным интерфейсом связи через интерфейсный модуль (ИМ) 32 и интерфейсный модуль (ИМ) 27.
Приемная фотомишень (ПФМ) 4, имеет в своем составе фотоматрицу (ФМ) 33, устройство мультиплексирования (УМ) 34, блок управления приемной фотомишенью (БУПФМ) 35, устройство определения пространственного положения (УОПП) 36 и интерфейсный модуль (ИМ) 37. Устройство определения пространственного положения (УОПП) 36 содержит трехосевой гироскоп (на фиг. не показан), трехосевой магнитный датчик (на фиг. не показан) и трехосевой акселерометр (на фиг. не показан), Фотоматрица (ФМ) 33 электрически связана с устройством мультиплексирования (УМ) 34, которое соединено с блоком управления приемной фотомишенью (БУПФМ) 35, с которым также связано устройство определения пространственного положения (УОПП) 36, при этом интерфейсный модуль (ИМ) 37 связан с блоком управления приемной фотомишенью (БУПФМ) 35. Приемная фотомишень (ПФМ) 4 и приемная фотомишень (ПФМ) 3 последовательно соединены проводным интерфейсом связи через интерфейсный модуль (ИМ) 37 и интерфейсный модуль (ИМ) 32.
Приемная фотомишень (ПФМ) 5, имеет в своем составе фотоматрицу (ФМ) 38, устройство мультиплексирования (УМ) 39, блок управления приемной фотомишенью (БУПФМ) 40, устройство определения пространственного положения (УОПП) 41 и интерфейсный модуль (ИМ) 42. Устройство определения пространственного положения (УОПП) 41 содержит трехосевой гироскоп (на фиг. не показан), трехосевой магнитный датчик (на фиг. не показан) и трехосевой акселерометр (на фиг. не показан). Фотоматрица (ФМ) 38 электрически связана с устройством мультиплексирования (УМ) 39, которое соединено с блоком управления приемной фотомишенью (БУПФМ) 40, с которым также связано устройство определения пространственного положения (УОПП) 41, при этом интерфейсный модуль (ИМ) 42 связан с блоком управления приемной фотомишенью (БУПФМ) 40. Приемная фотомишень (ПФМ) 5 и приемная фотомишень (ПФМ) 4 последовательно соединены проводным интерфейсом связи через интерфейсный модуль (ИМ) 42 и и интерфейсный модуль (ИМ) 37.
Количество промежуточных лазерных приемо-передатчиков (ПЛПП) зависит от протяженности и кривизны тоннеля, при этом они последовательно соединяются между собой проводным интерфейсом связи через соответствующие интерфейсные модули, при этом каждый последующий ПЛПП соединен с ПФМ 5.
Лазерный приемо-передатчик 1 (Фиг. 2) установлен в стартовой шахте 43 в точке с известными координатами. Промежуточный лазерный приемопередатчик (ПЛПП) 2, устанавливается в возведенной части криволинейного тоннеля (на фиг. не обозначена), при этом он жестко закреплен на подвижной крепи тоннеля (на фиг. не обозначена). Приемная фотомишень (ПФМ) 3 закреплена в верхней точке хвостовой части первого модуля проходческого комплекса 44, приемная фотомишень (ПФМ) 4 закреплена в верхней точке хвостовой части второго модуля проходческого комплекса 45, приемная фотомишень (ПФМ) 5 закреплена в верхней точке хвостовой части третьего модуля проходческого комплекса 46.
Устройство работает следующим образом.
При прямолинейной проходке лазерный приемо-передатчик (ЛПП) 1, размещают в стартовой шахте 43 в заранее известных координатах. При помощи лазерного излучателя (ЛИ) 7 лазерный приемо-передатчик (ЛПП) 1 позиционируется в соответствии с заданной осью проходки на центр приемной фотомишени (ПФМ) 3, установленной в верхней точке хвостовой части первого модуля проходческого комплекса 44 с точно известными пространственными координатами и является базовой точкой для расчета координат полигонометрии при движении комплекса. При этом, лазерный приемо-передатчик (ЛПП) 1 и приемная фотомишень (ПФМ) 3 соединены проводным интерфейсом связи через интерфесные модули (ИМ) 16 и (ИМ) 32.
В начальном положении лазерный излучатель (ЛИ) 7 направлен на центр фотоматрицы (ФМ) 28 приемной фотомишени (ПФМ) 3, устройство мультиплексирования (УМ) 29 и блок управления приемной фотомишенью (БУПФМ) 30 определяют засвеченные элементы фотоматрицы (ФМ) 28 приемной фотомишени (ПФМ) 3 и, через интерфейсный модуль (ИМ) 32, информация передается в блок управления лазерным приемо-передатчиком (БУЛПП) 13. Расстояние до мишени определяется с помощью лазерного дальномера (ЛД) 8, данные от которого передаются в (БУЛПП) 13. В случае изменения положения модуля проходческого комплекса, при котором изменяется состояние засвеченных фотодиодов фотоматрицы (ФМ) 28, БУЛПП 13 лазерного приемо-передатчика (ЛПП) 1 формирует сигнал управления электрическими приводами вращения в вертикальной плоскости (ЭПz) 9 и горизонтальной плоскости (ЭПу) 10, для совмещения лазерного луча ЛИ 7 с центром фотоматрицы (ФМ) 28 приемной фотомишени (ПФМ) 3. При совмещении точки лазерного излучателя (ЛИ) 7 с центром фотоматрицы (ФМ) 28, по сигналам датчиков угла поворота в вертикальной плоскости (ДУz) 11 и горизонтальной плоскости (ДУу) 12 подаваемых на вход (БУЛПП) 13, определяется угол поворота платформы 6 в вертикальной Oz и горизонтальной Оу осях. Блок управления (БУЛПП) 13, на основании данных о расстоянии до приемной фотомишени (ПФМ) 3 и углов отклонения от заданной оси проходки, вычисляет координаты хвостовой точки модуля проходческого комплекса по формулам: В горизонтальной плоскости XOY:


где х0, у0 - начальные координаты хвостовой точки модуля проходческого комплекса, а - угол поворота платформы в горизонтальной плоскости XOY (Фиг. 3), r - расстояние от источника лазерного излучения (ЛИ) 7 до приемной фотомишени (ПФМ) 3, γ - угол наклона модуля (тангаж), ϕ - угол крена, определяемый системой определения пространственного местоположения, h - расстояние от приемной фотомишени (ПФМ) 3 до центральной оси модуля.
В вертикальной плоскости XOZ:

где β - угол поворота платформы в вертикальной плоскости XOZ.
Для определения координат передней части модуля проходческого комплекса используется устройство определения пространственного положения (УОПП) 31, на выходе которого формируются данные о пространственном положении модуля проходческого комплекса (крен, тангаж, курсовой угол) и поступают в блок управления приемной фотомишени (БУПФМ) 30 приемной фотомишени (ПФМ) 3. На основании данных пространственного положения, БУПФМ 30 определяет координаты передней части модуля проходческого комплекса 44 в соответствии с:



где х1, у1, z1 - координаты хвостовой точки модуля проходческого комплекса, ψ - курсовой угол,  - расстояние от хвостовой точки модуля проходческого комплекса до передней точки.
- расстояние от хвостовой точки модуля проходческого комплекса до передней точки.
В начале проходки модули проходческого комплекса продавливаются поочередно, при продавливании первого модуля проходческого комплекса 44 координаты его хвостовой точки определяются с помощью лазерного приемо-передатчика (ЛПП) 1 и приемной фотомишени (ПФМ) 3, координаты ножевой (передней) точки вычисляются с помощью устройства определения пространственного положения (УОПП) 31, размещенного в корпусе ПФМ 3. После того, как первый модуль проходческого комплекса 44 полностью продавлен в грунт, на его место опускается второй модуль проходческого комплекса 45, координаты его хвостовой точки определяются с помощью лазерного приемо-передатчика (ЛПП) 1 лазерный излучатель (ЛИ) 7 которого направлен на центр фотоматрицы (ФМ) 33 приемной фотомишени (ПФМ) 4, устройство мультиплексирования (УМ) 34 и блок управления приемной фотомишенью (БУПФМ) 35 определяют засвеченные элементы фотоматрицы (ФМ) 33 приемной фотомишени (ПФМ) 4 и, через интерфейсный модуль (ИМ) 37, информация передается в блок управления лазерным приемо-передатчиком (БУЛПП) 13, координаты ножевой (передней) точки вычисляются с помощью устройства определения пространственного положения (УОПП) 36, размещенного в корпусе ПФМ 4. при этом координаты хвостовой точки первого модуля проходческого комплекса 44 определяются с помощью устройства определения пространственного положения (УОПП) 36, которое передает углы наклона модуля в БУПФМ 35 и вычисление координат происходит по формулам:


где D - диаметр модуля проходческого комплекса.
Координаты ножевой точки модуля вычисляются по формулам (4)-(6). При продавливании третьего модуля проходческого комплекса 46 координаты его хвостовой точки определяются с помощью лазерного приемо-передатчика (ЛПП) 1, лазерный излучатель (ЛИ) 7 которого направлен на центр фотоматрицы (ФМ) 38 приемной фотомишени (ПФМ) 5, устройство мультиплексирования (УМ) 39 и блок управления приемной фотомишенью (БУПФМ) 40 определяют засвеченные элементы фотоматрицы (ФМ) 38 приемной фотомишени (ПФМ) 5 и, через интерфейсный модуль (ИМ) 42, информация передается в блок управления лазерным приемопередатчиком (БУЛПП) 13, координаты ножевой (передней) точки вычисляются с помощью устройства определения пространственного положения (УОПП) 41, размещенного в корпусе ПФМ 4. при этом координаты хвостовой точки второго модуля проходческого комплекса 45 определяются с помощью устройства определения пространственного положения (УОПП) 41, которое передает углы наклона модуля проходческого комплекса 45 в БУПФМ 40 и вычисление координат происходит по формулам (7) и (8).
В процессе криволинейной проходки для обеспечения прямой видимости, в возведенной части тоннеля устанавливаются промежуточные лазерные приемо-передатчики (ПЛПП) (на фиг. не показаны), количество которых зависит от протяженности и кривизны тоннеля.
В этом случае, лазерный луч ЛПП 1 позиционируется на центр фотоматрицы (ФМ) 25, сигналы с которой передаются устройством мультиплексирования (УМ) 26 в БУПЛПП 24, после чего блок управления лазерным приемо-передатчиком (БУЛПП) 1, по вышеописанному алгоритму, определяет координаты установки промежуточного лазерного приемопередатчика (ПЛПП) 2 и по проводному интерфейсу связи через интерфейсные модули 16 и 27 передает их в блок управления промежуточным лазерным приемо-передатчиком (БУПЛПП) 24. Промежуточный лазерный приемо-передатчик (ПЛПП) 2, в свою очередь, аналогично лазерному приемо-передатчику (ЛПП) 1, производит определение координат последующего промежуточного лазерного приемопередатчика (ПЛПП) (на фиг. не показан) или, в случае его отсутствия, определяет координаты приемной фотомишени (ПФМ) 5, при этом базовой точкой для расчета являются координаты лазерного приемо-передатчика (ЛПП) 1 или предыдущего промежуточного лазерного приемо-передатчика (ПЛПП) (на фиг. не показан) при его наличии. Для определения дирекционного угла (на фиг. не показан) блок управления 24 промежуточного лазерного приемо-передатчика 2 ориентирует лазерный излучатель (ЛИ) 19 на центр фотоматрицы (ФМ) 14, лазерного приемопередатчика (ЛПП) 1, или предыдущего промежуточного лазерного приемопередатчика (ПЛПП) (на фиг. не показан) при его наличии, при этом положение точки лазерного луча определяется устройством мультиплексирования (УМ) 15 и БУЛПП 13. БУПЛПП 24 запоминаются углы поворота платформы 17 относительно осей Oz и Оу и расстояние между двумя соседними приемо-передатчиками, определенное лазерным дальномером (ЛД)19, после чего, лазерный излучатель (ЛИ) 18 с помощью электрических приводов вращения в вертикальной плоскости (ЭПz) 20 и горизонтальной плоскости (ЭПу) 21 ориентируется на центр фотоматрицы (ФМ) 28 приемной фотомишени (ПФМ) 5 или следующего промежуточного лазерного приемо-передатчика (ПЛПП) (на фиг. не показан) при его наличии и по сигналам датчиков угла поворота в вертикальной плоскости (ДУz) 22 и в горизонтальной плоскости (ДУу) 23 определяются углы отклонения платформы 17 от базового направления на фотоматрицу (ФМ) 14 лазерного приемо-передатчика (ЛПП) 1 или промежуточного лазерного приемопередатчика (ПЛПП) (на фиг. не показан) при его наличии. Таким образом, по известному углу отклонения и расстоянию между лазерным приемопередатчиком (ЛПП) 1, промежуточным лазерным приемо-передатчиком (ПЛПП) 2 и приемной фотомишенью (ПФМ) 3 или следующим промежуточным лазерным приемо-передатчиком (ПЛПП) при его наличии, методом разомкнутого тахеометрического хода определяются координаты приемной фотомишени (ПФМ) 5, закрепленной в хвостовой части третьего модуля проходческого комплекса 46 по формулам:

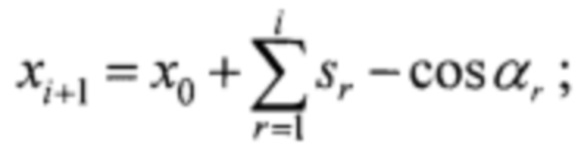
где αi - дирекционный угол, βr - угол между лазерными лучами двух соседних приемо-передатчиков, sr - расстояние между начальной и измеряемой точкой, х0, у0 - начальные координаты.
Вычисленные координаты хвостовой и ножевой точек проходческого комплекса с помощью интерфейсного модуля (ИМ) 16 передаются в систему управления микротоннелепроходческим комплексом (МТПК).
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА КОНТРОЛЯ ПОЛОЖЕНИЯ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ МИНИ-ЩИТА ДЛЯ СТРОИТЕЛЬСТВА МИНИ-ТОННЕЛЕЙ | 2009 |
|
RU2405937C1 |
| БОРТОВАЯ РАДИОАППАРАТУРА ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2011 |
|
RU2442723C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ ИЗБИРАТЕЛЬНОГО ДЕЙСТВИЯ ГОРНОПРОХОДЧЕСКОГО КОМПЛЕКСА | 2007 |
|
RU2360111C2 |
| УСТРОЙСТВО ДЛЯ ОРИЕНТАЦИИ ПРОХОДЧЕСКОГО КОМПЛЕКСА ПРИ СТРОИТЕЛЬСТВЕ КРИВОЛИНЕЙНЫХ ТОННЕЛЕЙ | 2008 |
|
RU2385418C1 |
| Система двустороннего беспроводного оптического канала связи с беспилотным летательным аппаратом | 2024 |
|
RU2841515C1 |
| Способ разработки месторождений полезных ископаемых подземным способом с использованием тоннелепроходческих механизированных комплексов | 2022 |
|
RU2801989C1 |
| НАЗЕМНЫЙ МАЛОГАБАРИТНЫЙ ТРАНСПОРТНЫЙ КОМПЛЕКС ДЛЯ ОСВЕЩЕНИЯ ПРИБРЕЖНОЙ ОБСТАНОВКИ | 2013 |
|
RU2538187C1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВОЛНЕНИЯ | 2012 |
|
RU2489731C1 |
| Автоматизированный аппаратурный комплекс спутниковой открытой оптической связи | 2015 |
|
RU2608060C2 |
| СИСТЕМА ДЛЯ ОДНОВРЕМЕННОГО УПРАВЛЕНИЯ НЕСКОЛЬКИМИ ЛАЗЕРНЫМИ ЛУЧАМИ С ПОМОЩЬЮ НЕПОДВИЖНОЙ ЖИДКОКРИСТАЛЛИЧЕСКОЙ МАТРИЦЫ | 2019 |
|
RU2699055C1 |
Изобретение относится к области горной промышленности, в конкретном случае к устройствам для определения координат и пространственного положения проходческих комплексов малых диаметров, состоящих из нескольких модулей, при строительстве прямолинейных и криволинейных тоннелей, в том числе при строительстве прямолинейных и криволинейных тоннелей методом продавливания тоннельной крепи. Система позиционирования проходческого комплекса в пространстве содержит лазерный приемопередатчик, закрепленный в стартовой шахте, один или более промежуточных лазерных приемопередатчиков, установленные на расстоянии друг от друга в пределах обеспечения прямой видимости в возведенной части тоннеля, и приемную фотомишень, установленную на проходческом комплексе, соединенные между собой проводным интерфейсом связи через интерфейсные модули, при этом лазерный приемопередатчик и промежуточные лазерные приемопередатчики выполнены идентично и содержат платформу, с размещенными на ней лазерным излучателем и лазерным дальномером. При этом платформа выполнена с возможностью вращения вокруг горизонтальной и вертикальной осей за счет электроприводов с обратной связью, а приемная фотомишень устанавливается в каждом модуле проходческого комплекса и выполнена с возможностью определения пространственного положения модулей проходческого комплекса. Технический результат заключается в обеспечении возможности определения координат и пространственного положения проходческих комплексов модульной конструкции при строительстве как прямолинейных, так и криволинейных тоннелей, в том числе методом продавливания. 3 ил.
Система позиционирования проходческого комплекса в пространстве, состоящая из лазерного приемопередатчика, закрепленного в стартовой шахте, одного или более промежуточных лазерных приемопередатчиков, установленных на расстоянии друг от друга в пределах обеспечения прямой видимости в возведенной части тоннеля, и приемной фотомишени, установленной на проходческом комплексе соединенных между собой проводным интерфейсом связи через интерфейсные модули, при этом лазерный приемопередатчик и промежуточные лазерные приемопередатчики выполнены идентично и содержат платформу, отличающаяся тем, что на платформе размещены лазерный излучатель и лазерный дальномер, при этом платформа выполнена с возможностью вращения вокруг горизонтальной и вертикальной осей за счет электроприводов с обратной связью, а приемная фотомишень устанавливается в каждом модуле проходческого комплекса и выполнена с возможностью определения пространственного положения модулей проходческого комплекса.
| УСТРОЙСТВО ДЛЯ ОРИЕНТАЦИИ ПРОХОДЧЕСКОГО КОМПЛЕКСА ПРИ СТРОИТЕЛЬСТВЕ КРИВОЛИНЕЙНЫХ ТОННЕЛЕЙ | 2008 |
|
RU2385418C1 |
| СИСТЕМА КОНТРОЛЯ ПОЛОЖЕНИЯ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ МИНИ-ЩИТА ДЛЯ СТРОИТЕЛЬСТВА МИНИ-ТОННЕЛЕЙ | 2009 |
|
RU2405937C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СТРОИТЕЛЬНОЙ МАШИНОЙ | 1994 |
|
RU2089708C1 |
| УСТРОЙСТВО ДЛЯ ОРИЕНТАЦИИ ПРОХОДЧЕСКОГО КОМПЛЕКСА ПРИ СТРОИТЕЛЬСТВЕ КРИВОЛИНЕЙНЫХ ТОННЕЛЕЙ | 2008 |
|
RU2385419C1 |
| RU 2008128927 A, 27.01.2010 | |||
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ ИЗБИРАТЕЛЬНОГО ДЕЙСТВИЯ ГОРНОПРОХОДЧЕСКОГО КОМПЛЕКСА | 2007 |
|
RU2360111C2 |
| DE 4017833 C1, 06.02.1992. | |||

